Hans Journal of Wireless Communications
Vol.07 No.03(2017), Article ID:21030,8
pages
10.12677/HJWC.2017.73013
Novel Method of Range and Velocity Measurement Based on OFDM Pilot Signal
Heng Ye, Xiaoyou Yu*, Nengda Ci, Pengshuai Sun, Hefeng Ma, Peiying Lin, Xing Chen
College of Information Science and Engineering, Hunan University, Changsha Hunan

Received: May 29th, 2017; accepted: Jun. 9th, 2017; published: Jun. 19th, 2017

ABSTRACT
The estimation of range and velocity is an important direction of the vehicular communications and networking field. In view of the pilot signal with large power, and the advantages of good passive detection performance, this paper proposes a new velocity and range measuring method using OFDM pilot signal based on the OFDM signal. The OFDM pilot signals frequency domain matrix was derived firstly, the range and velocity of the target can be obtained through searching the frequency of the columns and row vector frequency of the matrix. And then through the simulation experiment and performance analysis we prove that this method can meet the requirements of range and velocity measurement in vehicular communication networking.
Keywords:Vehicular Communication Networking, OFDM, Pilot Signal, Range and Velocity Measurement
基于OFDM导频信号的测距测速方法
叶恒,余小游*,慈能达,孙鹏帅,马和风,林培英,陈星
湖南大学,信息科学与工程学院,湖南 长沙

收稿日期:2017年5月29日;录用日期:2017年6月9日;发布日期:2017年6月19日

摘 要
实现车辆的距离和速度估计是车载通信与网络领域的重要方向,针对导频信号具有功率大、良好的无源探测性能等优点,本文在OFDM信号的基础上,提出了一种利用OFDM导频信号进行测距测速的方法。首先推导得到了OFDM导频信号接收信号频域矩阵,对其行、列向量频谱进行搜索,经过处理得到目标的距离和速度,然后通过仿真实验及性能分析,验证了OFDM导频信号能够满足车载通信网络中车辆测距测速要求。
关键词 :车载通信网络,OFDM,导频信号,测距测速

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
车载通信网络是一种利用无线通信技术、定位技术及传感技术相互配合实现车辆与公众网络通信的动态移动通信系统,距离-速度估计是车载通信网络应用中的重要方向。学者对各种类型的OFDM定位探测信号进行了深入研究 [1] [2] [3] ,文献 [4] 针对DAB/DVB信号提出了被动式探测信号处理算法,R.F. Tigrek利用OFDM信号设计了X波段带宽1 MHz的监测雷达,能对目标的距离和速度进行估计,探测距离达50 Km [5] 。D. Garmatyuk利用500 MHz的超宽带OFDM实现了短距离雷达成像和数据传输融合系统,雷达探测距离约3 m [6] 。C. Sturm利用带宽为100 MHz的OFDM信号在24 GHZ设计了雷达-通信融合系统 [7] ,采用频域分析法对频谱进行分析,距离分辨率为15 m,速度分辨率为24.82 m/s。文献 [8] 提出了频域接收信号最大似然准则下的距离-速度估计算法。文献 [9] 在接收端利用数字波束成形技术获得目标的距离多普勒方位角信息。而OFDM导频信号常用来进行系统同步和信道估计,其大功率特性以及良好的无源探测性能已在某些领域有了相关应用,能否利用这些特性进行测距测速是值得探讨的问题。
本文提出了一种利用OFDM导频信号对目标距离和速度进行估计的方法。具体来说:首先在OFDM系统模型基础上,推导得出导频信号频域矩阵与目标的距离、速度的关系,得出导频信号测距测速方法,再对提出的OFDM导频信号测距测速方法进行论证分析和仿真实验。
2. OFDM导频信号及其结构
导频就是常说的参考信号,该信号对于接收端来说是已知信号,是发射端提供给接收端的用于估计发送信号或估计信道特性的信号。对于导频信号,不同系统有不同的选择。IEEE802.11a里规定,4个导频对应到−21,−7,7和21这4个子载波上。当规定序列为1时,对应导频是{1,1,1,−1};当规定序列为−1时,对应导频是{−1,−1,−1,1}。
在一帧OFDM信号中,在特定的位置插入一些子载波充当导频,用来进行系统同步和信道估计,有助于正确的恢复星座幅度和相位,其余位置子载波用来传递数据。而导频信号的大功率特性及良好的无源探测性能能否用来测距测速是我们研究的兴趣点。
用导频信号测距测速,必然要考虑到不同的导频结构带来的影响,故下面详细介绍常见的导频结构。由于OFDM的时域频域二维特性,常见的导频分布结构有三种:块状导频分布结构、梳状导频分布结构、离散导频分布结构。
对于插入导频的OFDM符号,一个OFDM符号表达式可以表示为:
 (1)
(1)
 为有效数据子载波数,
为有效数据子载波数, 为总导频子载波数,
为总导频子载波数, 和
和 分别为调制域有效数据和导频。
分别为调制域有效数据和导频。
块状导频如图1(a)所示,在某些OFDM符号上全部插入导频信号,所有的载波都含导频信号,即每隔一段时间周期性的发送导频信号。经过IFFT、D/A转换、上变频可得发射端块状导频信号表达式为:
 (2)
(2)
其中 为调制域导频信号,N为OFDM符号子载波数,
为调制域导频信号,N为OFDM符号子载波数, 为符号索引,
为符号索引, 为导频子载波索引,
为导频子载波索引, 为子载波间隔。
为子载波间隔。
梳状导频如图1(b)所示,导频在每个OFDM符号里均匀分布,在部分载波上含有导频信号,所以在时间方向有很强的抗快衰落能力。经过IFFT、D/A、上变频得发射端梳状导频信号表达式为:
 (3)
(3)
其中 为调制域导频信号,M为OFDM符号数,
为调制域导频信号,M为OFDM符号数, 为子载波索引,
为子载波索引, 为符号索引。
为符号索引。
图1(c)~图1(d)所示为离散分布的形式,它们同时在时间和频率两个方向插入导频信号。在实际的系统中,会将连续的和离散的导频插入方式联合使用,以获得更好的性能。接下来详细介绍OFDM导频信号的测距测速方法。
3. OFDM导频信号测距测速
车载通信网络中OFDM系统模型如图2所示,通过对二进制数据进行数字映射,串并转换,插入导频,然后进行IFFT调制后加入循环前缀就可以获得一个完整的OFDM符号。
由于导频信号有不同的结构,以下以梳状导频结构为例进行推导,梳状导频在频域插入导频信号 ,对于一帧OFDM数据,经推导发射端梳状导频信号表达式在这里写为:
,对于一帧OFDM数据,经推导发射端梳状导频信号表达式在这里写为:
 (4)
(4)
其中 为一帧中OFDM符号个数,
为一帧中OFDM符号个数, 为符号索引,
为符号索引, 为子载波索引,
为子载波索引, 为发射端符号
为发射端符号 导频子载波
导频子载波 上的调制数据(即导频调制域信号),
上的调制数据(即导频调制域信号), 为导频信号子载波频率,
为导频信号子载波频率, 为子载波间隔,
为子载波间隔, 为一个OFDM符号时间。
为一个OFDM符号时间。
经推导可得经过传播后到达接收端的导频信号表达式为:
 (5)
(5)
其中 为第p条路径的幅度衰减和相位偏移系数,
为第p条路径的幅度衰减和相位偏移系数, 为第p条路径目标的时延,
为第p条路径目标的时延, 为第p条路径的多普勒频移。
为第p条路径的多普勒频移。
由接收端可得导频信号表达式为:
 (6)
(6)
其中 为接收端调制域导频信号;比较公式(5)和公式(6)整理可得:
为接收端调制域导频信号;比较公式(5)和公式(6)整理可得:
 (7)
(7)
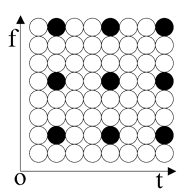
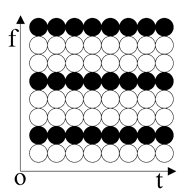
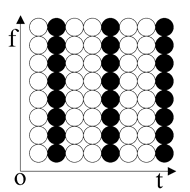 (a) 块状导频 (b) 梳状导频 (c) 矩形离散导频 (d) 菱形离散导频
(a) 块状导频 (b) 梳状导频 (c) 矩形离散导频 (d) 菱形离散导频
Figure 1. Common pilot structure in OFDM system
图1. OFDM系统中常见的导频结构
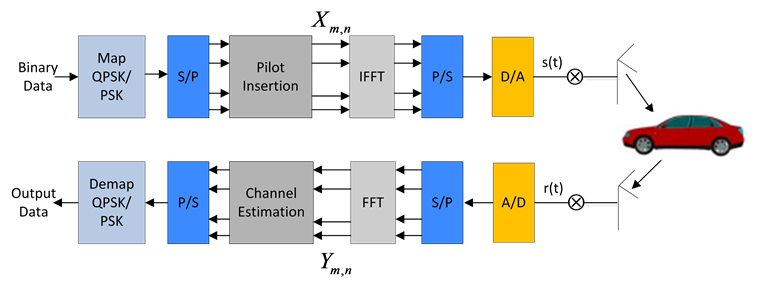
Figure 2. The schematic diagram of OFDM system in vehicular communication networking
图2. 车载通信网络中OFDM系统原理图
定义 为发射端导频频域信号
为发射端导频频域信号 的矩阵形式,
的矩阵形式, 为接收端导频频域信号
为接收端导频频域信号 的矩阵形式。由上式可以看出,频域信号可以表示为二维矩阵形式,矩阵中的各个元素为
的矩阵形式。由上式可以看出,频域信号可以表示为二维矩阵形式,矩阵中的各个元素为 条路径影响的线性叠加,并且信号中不存在时延-多普勒耦合项。将矩阵
条路径影响的线性叠加,并且信号中不存在时延-多普勒耦合项。将矩阵 与矩阵
与矩阵 点除,得到梳状导频矩阵
点除,得到梳状导频矩阵 如下:
如下:
 (8)
(8)
导频矩阵 中的元素将为:
中的元素将为:
 (9)
(9)
由于:
 (10)
(10)
 (11)
(11)
其中 为目标距离,
为目标距离, 为电磁波速度,
为电磁波速度, 为目标相对速度,
为目标相对速度, 为载波中心频率,则:
为载波中心频率,则:
 (12)
(12)
与矩阵 相比,矩阵
相比,矩阵 中不存在调制数据
中不存在调制数据 的影响,并且具有二维谐波的形式。
的影响,并且具有二维谐波的形式。
同理可得到块状导频矩阵 ,其中元素为:
,其中元素为:
 (13)
(13)
对于块状导频所在任一OFDM符号位置 ,式(13)中:
,式(13)中: 为常数,故此时距离
为常数,故此时距离 随着频率线性相移,定义非常数项:
随着频率线性相移,定义非常数项:
 (14)
(14)
由梳状导频矩阵 知,对于梳状导频所在任一子载波位置
知,对于梳状导频所在任一子载波位置 式(12)中:
式(12)中: 为常数,此时相对速度
为常数,此时相对速度 随着时间线性相移,定义非常数项:
随着时间线性相移,定义非常数项:
 (15)
(15)
由公式(14) (15)和导频矩阵知:距离 随着频率线性相移,相对速度
随着频率线性相移,相对速度 随着时间线性相移,目标的距离和速度存在于为导频矩阵的列向量频率和行向量频率,故可用一个OFDM符号通过频谱搜索估计出其列向量频率,用一个子载波通过频谱搜索估计出其行向量频率,然后运用频域分析法,进行时延和多普勒的匹配得到各个目标的距离和速度。具体分析如下:
随着时间线性相移,目标的距离和速度存在于为导频矩阵的列向量频率和行向量频率,故可用一个OFDM符号通过频谱搜索估计出其列向量频率,用一个子载波通过频谱搜索估计出其行向量频率,然后运用频域分析法,进行时延和多普勒的匹配得到各个目标的距离和速度。具体分析如下:
 (16)
(16)
 (17)
(17)
式(16)取得最大值时有:
 (18)
(18)
此时得到目标索引:
 (19)
(19)
可以得到目标距离为:
 (20)
(20)
同理可得
 (21)
(21)
其中 为
为 取最大值时索引。在多目标情况下分别估计出了各个目标的距离和速度。
取最大值时索引。在多目标情况下分别估计出了各个目标的距离和速度。
4. 仿真结果与性能分析
由于导频信号有不同的插入方式,这直接影响到测距测速的准确性,故下面对不同导频结构测距测速进行简单的分析:
a) “块状导频”。块状导频信号是在某些OFDM符号所有子载波上插入导频信号,由于频域的连续性,故可对目标的距离进行估计。然而块状导频时域的不连续性导致其速度估计性能很差。
b) “梳状导频”。梳状导频信号是在每个OFDM符号某些子载波上插入导频信号,由于时域的连续性,故可对目标进行速度估计。然而梳状导频频域的不连续性导致其距离估计性能很差。
c)“离散导频”。由于导频信号的个数有限以及时域和频域的离散性特点,故离散导频信号结构测距测速性能都很差。
下面给出OFDM导频信号测距测速原理简图如图3所示。
仿真采用5.9G OFDM信号参数,具体参数见表1所示。
由于利用导频信号进行距离-速度的估计与导频信号结构密切相关,故下面对不同导频结构测距测速性能进行仿真与分析。
仿真中距离和相对速度分别取(50 m, 30 m/s) (200 m, 100 m/s)不同的值。得到各种导频结构距离速度估计值如表2所示。
对目标(200 m, 100 m/s)三种导频结构距离速度进行估计,其距离速度剖面图如图4所示。
通过表2和图4,可以得出:块状导频只能进行距离的估计,速度估计偏差太大;梳状导频只能进行速度的估计,距离估计偏差太大;离散导频不能对目标进行距离速度估计。
测量精度描述了对目标参数的测量准确度。这里用均方误差来表示精度,且用块状导频信号进行测

Figure 3. Pilot signal range and velocity measurement principle diagram
图3. 导频信号测距测速原理简图

Table 1. OFDM system parameters
表1. OFDM系统参数
距用梳状导频信号进行测速,画出精度与信噪比之间的关系图,如图5所示。
当信噪比大于10 dB时,测距测速精度随着信噪比的增大而保持不变,完整一帧数据和导频信号测
Table 2. Pilot structure and range velocity estimated value
表2. 导频结构与距离速度估计值
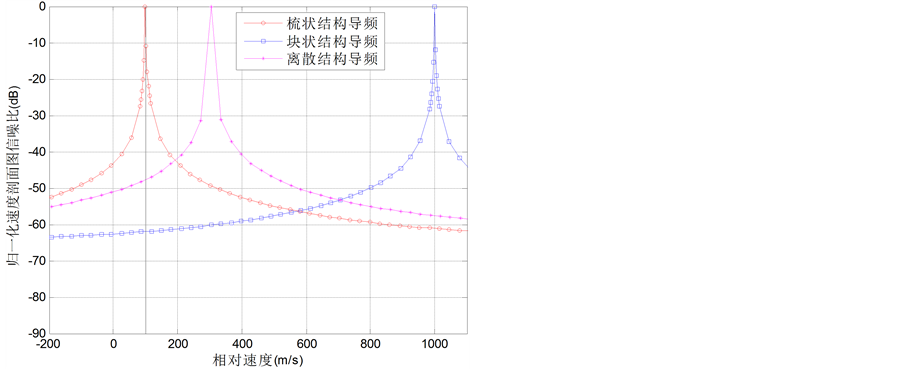
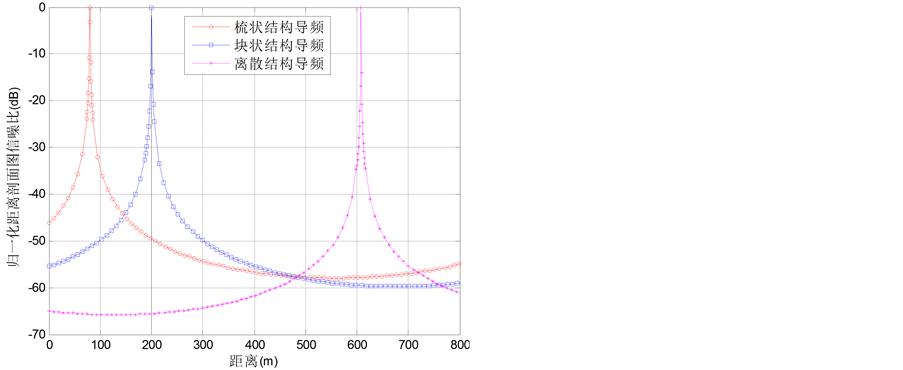 (a) 距离剖面图 (b) 速度剖面图
(a) 距离剖面图 (b) 速度剖面图
Figure 4. Different pilot structure range-velocity profile
图4. 不同导频结构距离-速度剖面图

 (a) 距离均方根误差与信噪比的关系 (b) 速度均方根误差与信噪比的关系
(a) 距离均方根误差与信噪比的关系 (b) 速度均方根误差与信噪比的关系
Figure 5. Relation between precision and SNR
图5. 精度与信噪比关系图
距测速时距离精度分别为0.39 m,0.36 m,速度精度分别为1.05 m/s,0.95 m/s,随着噪声的增大,精度变差,当信噪比为0 dB时,完整一帧数据和导频信号距离速度估计精度分别为8 m,7.5 m和23 m/s,19.5 m/s,由距离速度估计精度知采用合适结构的OFDM导频进行测距测速的抗噪声性能较好,测量的准确度较高。
5. 结束语
本文通过推导得出目标距离和速度存在于接收信号OFDM导频频域矩阵的列向量频率和行向量频率中,通过导频矩阵与距离速度的关系,提出了一种利用OFDM导频信号进行车载通信网络中的测距测速方法。仿真结果表明,利用OFDM导频信号能够有效的实现测距测速功能,且抗噪声性能较强,能够满足车载通信网络中车辆测距测速要求。
基金项目
国家自然科学基金项目:61371115。
文章引用
叶 恒,余小游,慈能达,孙鹏帅,马和风,林培英,陈 星. 基于OFDM导频信号的测距测速方法
Novel Method of Range and Velocity Measurement Based on OFDM Pilot Signal[J]. 无线通信, 2017, 07(03): 103-110. http://dx.doi.org/10.12677/HJWC.2017.73013
参考文献 (References)
- 1. Garmatyuk, D., Schuerger, J., Morton, Y.T., et al. (2007) Feasibility Study of a Multi-Carrier Dual-Use Imaging Radar and Communication System. Proceedings of European Microwave Conference, Munich, 10-12 October 2007, 1473- 1476.
- 2. Sen, S. and Nehorai, A. (2010) OFDM MIMO Radar with Mutual-Information Waveform Design for Low-Grazing Angle Tracking. IEEE Transactions on Signal Processing, 58, 3152-3162. https://doi.org/10.1109/TSP.2010.2044834
- 3. Garmatyuk, D. (2011) Adaptive Multicarrier OFDM SAR Signal Processing. IEEE Transactions on Geoscience and Remote Sensing, 49, 3780-3790. https://doi.org/10.1109/TGRS.2011.2165546
- 4. Berger, C.R. (2010) Signal Processing for Passive Radar Using OFDM Waveforms. IEEE Journal of Selected Topics in Signal Processing, 4, 226-238. https://doi.org/10.1109/JSTSP.2009.2038977
- 5. Tigrek, R.F. (2009) Multi-Carrier Radar Waveform Schemes for Range and Doppler Processing. Proceedings of IEEE Radar Conference, Pasadena, CA, 4-8 May 2009, 1-5.
- 6. Garmatyuk, D. (2011) Multifunctional Software-Defined Radar Sensor and Data Communication System. IEEE Sensors Journal, 11, 99-106. https://doi.org/10.1109/JSEN.2010.2052100
- 7. Sturm, C. (2011) Waveform Design and Signal Processing Aspects for Fusion of Wireless Communications and Radar Sensing. Proceedings of the IEEE, 99, 1236-1259. https://doi.org/10.1109/JPROC.2011.2131110
- 8. Braun, M., Sturm, C. and Jondral, F.K. (2011) On the Single-Target Accuracy of OFDM Radar Algorithms. Proceedings of IEEE 22nd International Symposium on PIMRC, Toronto, 11-14 September 2011, 794-798.
- 9. Sit, Y.L., Nguyen, T.T. and Sturm, C. (2013) 2D Radar Imaging with Velocity Estimation Using a MIMO OFDM Based Radar for Automotive Applications. Proceedings of the 10th European Radar Conference, Nuremberg, 9-11 October 2013, 145-148.