Open Journal of Circuits and Systems
Vol.2 No.1(2013), Article ID:9642,4 pages DOI:10.12677/OJCS.2013.21001
Application of PLC in Control System of the Long Rail Guide Car
Shenyang Locomotive and Rolling Stock Co., Ltd., CNR Group, Shenyang
Email: handan2504@yahoo.com.cn
Received: Feb. 4th, 2013; revised: Feb. 26th, 2013; accepted: Mar. 6th, 2013
ABSTRACT:
In this paper, hydraulic control of the long rail guide car is proposed, achieving the precise control of the long rail guide car’s each function. The detection of connection beam relative levelness has been improved reliability based on the three die redundant fault-tolerant technology. On the basis of the PLC’s controlling, the amount of the switch and the use of PID regulation, the analog closed-loop control is realized.
Keywords: Long Rail Guide; PLC Control; PID Control
PLC液压控制系统在长钢轨引导车上的应用
韩 丹,焦天驹
中国北车集团沈阳机车车辆有限责任公司,沈阳
Email: handan2504@yahoo.com.cn
摘 要:
本文提出了长钢轨引导车的液压控制系统,实现了长钢轨引导车各功能的准确控制。在该车的连接梁相对水平度的检测中,采用三模冗余容错技术,提高数据采集的可靠性。在PLC对开关量进行控制的基础上,运用PID调节,实现了对模拟量闭环控制。
收稿日期:2013年2月4日;修回日期:2013年2月26日;录用日期:2013年3月6日
关键词:长钢轨引导;PLC控制;PID控制
1. 引言
现有的长轨车在进行收轨作业时(如图1所示),是先利用收轨小车将钢轨收到作业尾车上,经作业中车(三)、作业中车(二)、作业中车(一)、作业首车至安全车(二),经过运轨车、锁定车到安全车(一),在经过运轨车及锁定车时,车上需要有工人对钢轨进行引导来保持钢轨的运行方向。作业过程中,因工人须在车上行走,而车上的设施有很多,所以不安全的因素很多,工伤事故时有发生。
长钢轨车引导车(如图2所示)是在长钢轨车上从安全车(一)到安全车(二)之间设置的供收、拨轨引导车运行的轨道上,在收轨作业时为收、拨钢轨,引导钢轨端部,保证钢轨顺利上车的装置。长钢轨引导车有

Figure 1. The photo of long rail car dump rail operation
图1. 长钢轨车卸轨作业照片
照明、监控设备,在作业过程中减少了人工操作,提高了作业过程的安全性,减少工伤事故的发生。引导车上用电由柴油发动机带动轴向发电机供电。发电机的功率大约在5 KW左右,发出的交流电为直流电源供电,由直流电源为液压控制系统提供电源。整个引导车的所有动作都是由电气控制配合液压系统来实现的。其中主要包括:连接梁相对水平度的检测控制、液压泵的压力控制,液压站电磁阀的控制,其均采用PLC(可编程控制器)控制完成。
2. 液压控制系统介绍
液压控制系统其中主要包括:连接梁相对水平度的检测控制、液压泵的压力控制,液压站电磁阀的控制,调节车轮运动速度的控制,其均采用PLC控制完成。
2.1. 连接梁相对水平度的检测
为了保证连接梁的相对水平状态,在连接梁上安装倾角传感器,可以测量连接梁相对于大地的水平度。同样,在收轨小车底部平整部位安装倾角传感器可以测量列车相对于大地的水平度。可编程逻辑控制器(PLC)通过采集2个倾角传感器的输出信号,可以计算得到连接梁相对于列车的相对水平度。
PLC将相对水平度作为反馈量,通过控制算法,得到平衡油缸塞是否该运动以及是伸还是缩运动的控制信息,据此控制液压系统的相应电磁阀,通过电磁阀控制进入平衡油缸的压力油,实现伸缩动作,从而调节连接梁的水平度到水平状态。倾角传感器的精度是0.1˚,能够满足相对水平度小于1˚的性能要求。

Figure 2. Long rail guide car 3D rendering
图2. 长钢轨引导车三维效果图
在数据采集功能的设计上,采用了三模冗余容错技术来实现。将基于马尔可夫模型来分析三模冗余系统的可靠性。设每个通道模块的失效率为常数λ;故障覆盖率为c;维修率为μ。某一时刻只有1个通道模块发生失效。系统开始工作时,处于完好状态,即3个通道模块均正常工作。图3所示为三模冗余系统的马尔可夫模型状态图,其马尔可夫状态过程可描述为[1,2]:
1) 状态0表示系统处于正常工作状态;
2) 状态1表示系统中有一个通道模块发生可测故障,系统处于二取二表决状态;
3) 状态2表示系统中两个通道模块发生可测故障,不能进行表决输出,由于不能确定单通道模块是否存在未被检测到的故障,此状态下系统已不能正常工作,此时是故障–安全状态;
4) 状态3表示系统中有一个通道模块故障,但故障没有被检测出来,按三取二原则,系统处于可靠工作状态;
5) 状态4表示系统中有两个通道模块故障,检测到一个通道模块故障并停机,另一个通道模块的故障没有被检测到,系统通过二取二表决不能得到一致输出,系统处于故障–安全状态;
6) 状态5表示系统中三个通道模块均处于故障状态,系统处于危险状态。
由图4可以得到状态转移密度矩阵。用 ,表示t时刻系统处于状态j的概率,
,表示t时刻系统处于状态j的概率, ,初始条
,初始条 根据矩阵方程
根据矩阵方程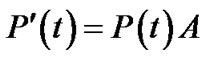 可得到各时刻各个状态的概率。由马尔
可得到各时刻各个状态的概率。由马尔

Figure 3. Connection beam levelness control scheme hint
图3. 连接梁水平度控制方案示意

Figure 4. Three mode of the redundant system markov state diagram
图4. 三模冗余系统的马尔可夫状态图
可夫转移图可以看出,状态0、状态1和状态3系统处在可靠的状态下,状态0、1、2、3、4系统处在安全的状态下。
可靠性:
由MATLAB仿真出来的可靠性曲线如图5所示。
在仿真参数选择中我们选择μ = 0.9,c = 0.9,λ = 0.0001。由图5可以看出三模冗余系统相比非三模冗余系统具有着较高的可靠性。
2.2. 液压泵压力的模拟量控制性
液压泵在整个系统中起着关键的作用,只有确保液压泵准确稳定的运行,整个系统的稳定性才能保证。为了提高液压泵的精确性,采用PLC的PID功能对液压泵的压力进行控制(如图6所示)。系统由PLC、压力传感器、比例放大器、比例溢流阀等组成。

Figure 5. Reliability curve
图5. 可靠性曲线图
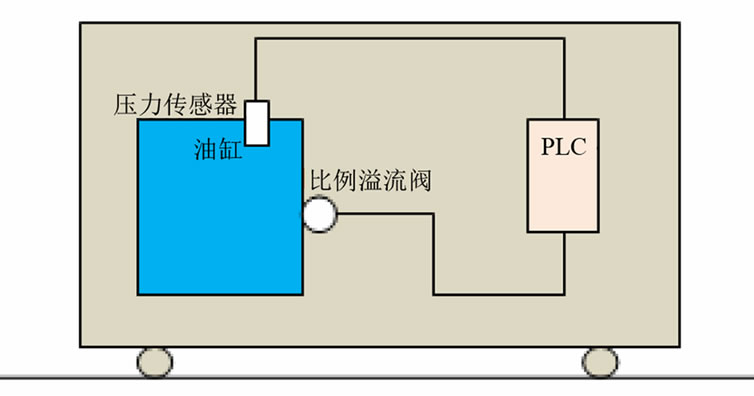
Figure 6. Oil cylinder pressure constant control scheme hint
图6. 油缸压力恒定控制方案示意
PLC接收了实测的液压泵的压力反馈信号后,与给定值比较后得到给定值与实测值之差。如实测值小于给定值,说明液压泵压力低于理想压力,要加大比例溢流阀的开口,增大压力;如实测值大于给定值,则液压泵压力高于理想压力,要减小比例溢流阀的开口,减小压力。在油缸中安装压力传感器,其输出为4~20 mA的标准信号。该压力信号输入到PLC中,作为控制的反馈量,通过控制算法得出油缸的比例溢流阀的控制量,用来控制比例溢流阀的开度。比例溢流阀的控制信号是4~20 mA的标准信号。油缸压力恒定在低压和高压两个设定值上,低压为12兆帕,高压为16兆帕。
2.2.1. PID算法[3-5]
在闭环控制系统中广泛应用PID控制(即比例–积分–微分控制)。PID控制器调节回路输出。为使系统到达稳定状态,应让偏差e趋于零。偏差e是给定值SP与过程变量PV的差。回路的输出变量M(t)是时间t的函数,它可以看做是比例项、积分项、微分项三项之和。
Figure 7. PID Hydraulic control principle
图7. PID液压控制原理图
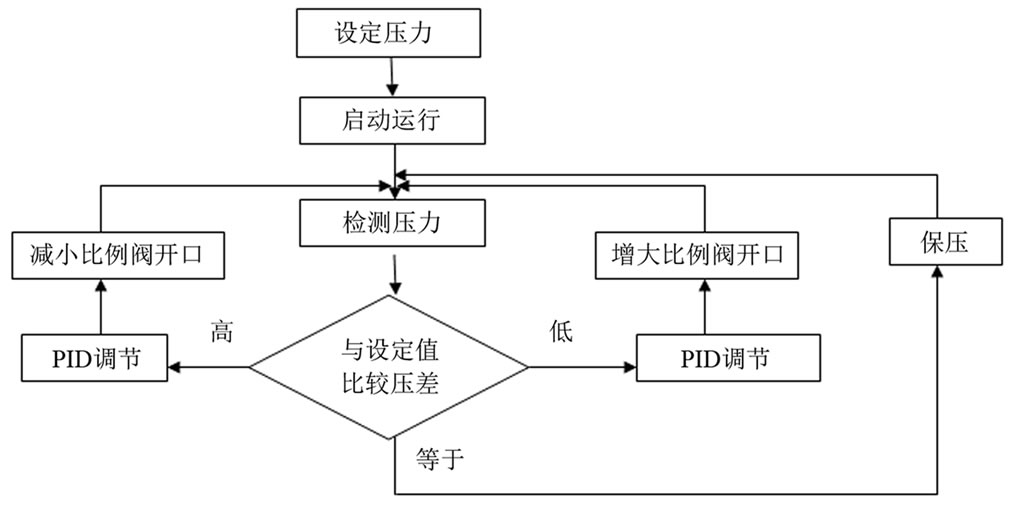
Figure 8. PID Program flow chart
图8. PID程序设计流程图

式中:M(t)—PID回路的输出,是时间函数;
Kc—PID回路的增益;
e—PID回路的偏差;
Minitial—PID回路输出的初始值。
数字计算机处理这个函数关系式,必须将连续函数离散化,对偏差周期采样后计算输出值。上式的离散形式为:

式中:Mn—在第n采样时刻PID回路输出的计算值;
en—在第n采样时刻的偏差值;
en−1—在第(n − 1)采样时刻的偏差值;
KD—微分项的系数;
Ki—积分项的系数;
Minitial—PID回路输出的初始值。
根据图7,压力设定值经PLC通道和压力传感器的压力反馈信号经A/D转换后作差值运算,并取绝对值,然后乘比例系数,由PLC通道输出。将给定量与反馈量作差值运算,通过PID调节,抑制输入波动,达到控制要求[4],程序流程图如图8所示。
2.2.2. PLC系统选型
PLC的普通输入/输出端口为开关量端口,为了使PLC能完成模拟量的处理,采用PLC基本单元加配模拟量扩展模块。从上面的分析可知,系统共需22个开关量输入、12个开关量输出,以及1点模拟量输入和1点模拟量输出,故实际应用中可选用FX2N-48MR PLC一台、2点模拟量输入模块FX2N-2AD一台和2点模拟量输出模块FX2N-2DA一台。
2.3. 液压站电磁阀的控制
引导车的主要动作是通过油缸驱动各个部件来实现的。主要油缸有:主臂牵引油缸、平衡油缸、引导梁油缸(左)、引导梁油缸(右)、拨轨梁油缸(左)、拨轨梁油缸(右)、提升油缸(1)、提升油缸(2)、卡轨油缸(1)、卡轨油缸(2)、防翻油缸等组成。与油缸相对应的液压电磁阀有29个,通过对电磁阀的控制来实现引导车的各个动作。
3. 结论
本文设计出了符合长钢轨引导车各个功能的液压控制系统。该引导车的设计方案已经通过了相关的评审,并进行了样车的试制。在本系统中,作者提出的连接梁相对水平度的检测控制设计方案,构成三取二冗余表决模式。通过采用三模冗余容错技术能够大大地提高数据采集的可靠性,保证了连接梁水平控制的稳定性。液压泵压力的模拟量PID控制,改善了控制效果,提高了设备的可靠性。
参考文献 (References)
[1] 傅忠传, 陈红松, 崔刚, 杨孝宗. 处理器容错技术研究与展望[J]. 计算机研究与发展, 2007, 44(1): 154-160.
[2] 孙秀娟. 基于双模冗余容错技术的数据采集系统设计[J]. 电测与仪表, 2008, 45(8): 49-52.
[3] 张发玉. 可编程序控制器应用技术[M]. 西安: 西安电子科技大学出版社, 2006: 8.
[4] 史国生. 电气控制与可编程控制器技术[M]. 北京: 化学工业出版社, 2003: 12.
[5] 鲁远栋. PLC 机电控制系统应用设计技术[M]. 北京: 电子工业出版社, 2006: 4.