Geomatics Science and Technology
Vol.2 No.03(2014), Article ID:13833,5 pages
DOI:10.12677/GST.2014.23005
The Inspection Method Based on Space Circle Fitting for Shield Tunnel Portal
Tianjin Institute of Surveying and Mapping, Tianjin
Email: cai_shiyi@126.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: May 24th, 2014; revised: Jun. 20th, 2014; accepted: Jul. 1st, 2014
It is necessary to detect the position and posture of originating and receiving portal during subway shield construction, in order to ensure that the shield construction will not deviate from the design line. Portal position is expressed by the coordinates of the center of the portal, while portal posture is expressed by the angle between portal plane and horizontal plane, and the angle between portal plane and design line. These data cannot be directly observed, but they can be indirectly observed by calculating the measuring portal circle. Taking Tianjin subway project as an example, this paper introduces the data processing of subway shield tunnel portal detection based on spatial circle fitting.
Keywords:Subway, Shield, Inspection of Tunnel Portal, Data Processing, Plane Fitting, Space Circle Fitting

蔡士毅,董 晨
天津市测绘院,天津
Email: cai_shiyi@126.com
收稿日期:2014年5月24日;修回日期:2014年6月20日;录用日期:2014年7月1日

地下铁道盾构施工中需要对始发、接收洞门的位置和姿态进行检测,以确保盾构施工不至于偏离设计线路。洞门位置通过洞门中心坐标来表达;洞门姿态通过洞门所在平面与水平面和设计线路夹角来表达。这些都不能直接观测,需要通过洞门圈的测量,拟合洞门圈所在空间圆来计算得到。本文以天津某地铁工程为例,介绍了基于空间圆拟合的地铁盾构洞门检测方法,及其数据处理过程。
地铁,盾构,洞门检测,数据处理,平面拟合,空间圆拟合

随着我国城市地下铁路建设的快速发展,盾构机已经广泛应用在地铁隧道施工中。一般情况下,在盾构机始发和接收位置需要设置洞门。设置洞门便于车站结构与混凝土管片连接为整体,有利于车站与区间连接处防水。由于施工测量与施工工艺存在一定误差,洞门的位置和姿态不一定与设计值完全一致。因此需要对始发、接收洞门进行检测,以确保盾构施工达到符合要求的贯通精度[1] 。
洞门的检测工作主要包括洞门的位置检测和姿态检测。洞门的位置检测需要精确测量洞门中心坐标,而盾构洞门不能直接测量,需要通过对洞门圈的测量实现洞门中心的间接测量;洞门的姿态检测包括洞门的倾斜率和洞门与设计线路在该处切线方向的夹角,同样这些也需要对洞门圈测量后计算得出。
传统测量中洞门位置检测,通常采用钢尺量测的方式,这种方式工作量大,测量精度低,且不能对洞门的姿态进行检测。无协作目标全站仪的应用为几何形体的检测提供了新的测量手段[2] -[5] 。本文将空间圆拟合方法应用于地铁盾构洞门检测中。在洞门前视野范围合理的位置设站,应用无协作目标全站仪在洞门圈内边缘均匀采集观测点。数据处理采用分步拟合的方法,即首先进行平面拟合,计算洞门姿态数据;然后进行空间圆拟合,计算洞门的位置数据。数据处理方法已经编写成matlab程序[6] ,并结合实际观测数据对数据处理成果进行比较、分析。
盾构洞门圈可以近似视为空间圆,根据空间解析几何知识[7] ,空间圆可以表达成平面与球面相交的形式,即
 (1)
(1)
其中, 表示空间圆上任意一点,
表示空间圆上任意一点, 为球心坐标,
为球心坐标, 为球半径。与平面相交,形成固定空间圆的球面不是唯一确定的,而球心在该平面上的球面只有一个,故令:
为球半径。与平面相交,形成固定空间圆的球面不是唯一确定的,而球心在该平面上的球面只有一个,故令:
 (2)
(2)
因平面方程参数 具有相关性,本文所述工程,平面不经过坐标原点,故令
具有相关性,本文所述工程,平面不经过坐标原点,故令 。则式(2)可写为:
。则式(2)可写为:
 (3)
(3)
方程(1)可写为
 (4)
(4)
式(4)中,共有 ,6个待定参数,其中包含3个平面参数和3个圆参数,因此施测3点便足够解算所有参数,施测3点以上时,可采用最小二乘平差方法[8] 来计算。本文采用分步拟合的计算方法,即先进行平面拟合,计算平面参数
,6个待定参数,其中包含3个平面参数和3个圆参数,因此施测3点便足够解算所有参数,施测3点以上时,可采用最小二乘平差方法[8] 来计算。本文采用分步拟合的计算方法,即先进行平面拟合,计算平面参数 ;再进行空间圆拟合,计算空间圆参数
;再进行空间圆拟合,计算空间圆参数 。
。
2.1. 平面拟合数据处理
设观测点位坐标为 ,根据式(4)列立平面拟合误差方程:
,根据式(4)列立平面拟合误差方程:
 (5)
(5)
令 ,则式(5)可写为
,则式(5)可写为
 (6)
(6)
其中 ,
, ,
, ,
, 为观测点个数。根据最小二乘原理计算得,
为观测点个数。根据最小二乘原理计算得,
 (7)
(7)
平面参数 为平面的法向量,故可通过平面参数计算洞门的姿态信息。洞门所在平面与设计线路法线方向的夹角
为平面的法向量,故可通过平面参数计算洞门的姿态信息。洞门所在平面与设计线路法线方向的夹角 和倾斜率
和倾斜率 可由式(8)计算。
可由式(8)计算。
 (8)
(8)
2.2. 空间圆拟合数据处理
通过平面拟合数据处理,计算得到平面参数 ,根据式(4)中施测点与球心和半径的关系,可列立如下函数方程:
,根据式(4)中施测点与球心和半径的关系,可列立如下函数方程:
 (9)
(9)
由式(4)、(9)列立误差方程
 (10)
(10)
其中 ,表示空间圆参数的初始值。同理,根据最小二乘原理,可计算参数
,表示空间圆参数的初始值。同理,根据最小二乘原理,可计算参数 ,然后由式(3)计算出
,然后由式(3)计算出 。
。
2.3. 拟合成果的评价
由于筑造工艺等因素影响,观测的盾构洞门圈内环不一定是一个标准的空间圆。空间圆的拟合质量可以通过平面度和圆度的计算来评价。平面度可以用来表达平面的平整度;圆度同样可表达圆的圆形度。观测点到拟合平面的距离 和到拟合空间圆的距离
和到拟合空间圆的距离 ,可写为:
,可写为:
 (11)
(11)
洞门圈的平面度 和圆度
和圆度 可表达为:
可表达为:
 (12)
(12)
2.4. 洞门拟合中心与设计中心的比较方法
由于洞门施工工艺与测量误差的影响,洞门不一定能够恰好安装在设计里程位置,这种情况下采用拟合洞门中心与设计洞门中心比较,并不合理。本文采用的比较方法是,首先将拟合洞门平面图、设计洞门中心、设计线路中线应用AutoCAD软件[9] 绘制于图纸上;然后沿线路设计中线方向,量取设计洞门中心至拟合洞门的里程差;最后采用设计洞门中心沿设计线路中心方向至拟合洞门的投影值与拟合洞门中心进行比较。
根据以上数据处理原理,采用MATLAB编写数据处理程序。本文选择天津某地铁工程洞门检测数据作为测试数据。采用无协作目标全站仪在洞门圈内侧均匀施测9个点。观测点位如图1所示,因城市坐标涉密,图中点位均进行了平移处理。
由公式(7)计算出拟合平面参数,得到平面方程:
 (13)
(13)
由公式(8)计算洞门姿态信息, 。然后由公式(11)、(12)计算出观测点至拟合平面
。然后由公式(11)、(12)计算出观测点至拟合平面
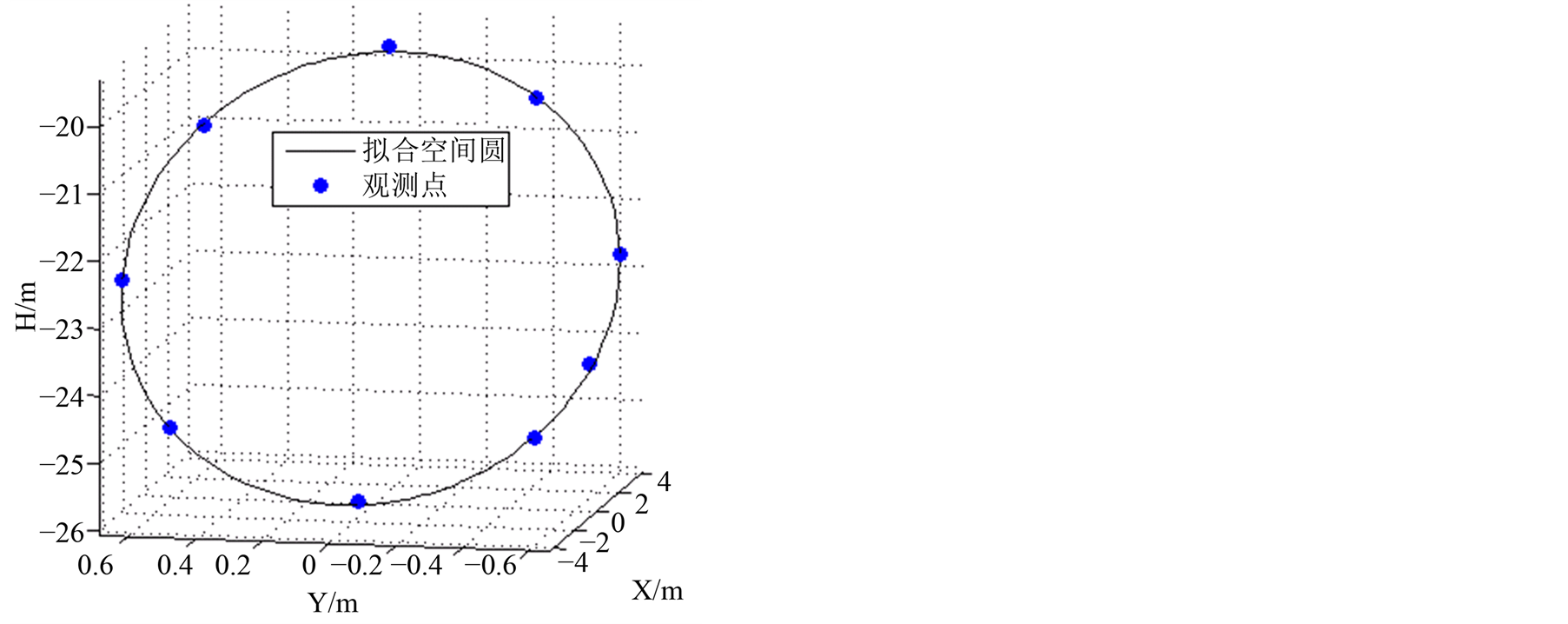
Figure 1. The sketch map of observation points’ position
图1. 观测点点位示意图
的距离和洞门圈平面度 。得到平面参数之后,进行空间圆拟合计算,并计算出观测点至拟合空间圆的距离和圆度
。得到平面参数之后,进行空间圆拟合计算,并计算出观测点至拟合空间圆的距离和圆度 。观测点至拟合平面和拟合空间圆的距离如图2所示,图2可看出,观测点距拟合平面最远不超过7 mm,距拟合空间圆最远不错过9 mm,可见本文采用测试数据拟合效果较好。
。观测点至拟合平面和拟合空间圆的距离如图2所示,图2可看出,观测点距拟合平面最远不超过7 mm,距拟合空间圆最远不错过9 mm,可见本文采用测试数据拟合效果较好。
根据章节2.4方法,由作图方法得出设计洞门中心与拟合洞门里程差为:+55 mm。位置如图3所示。
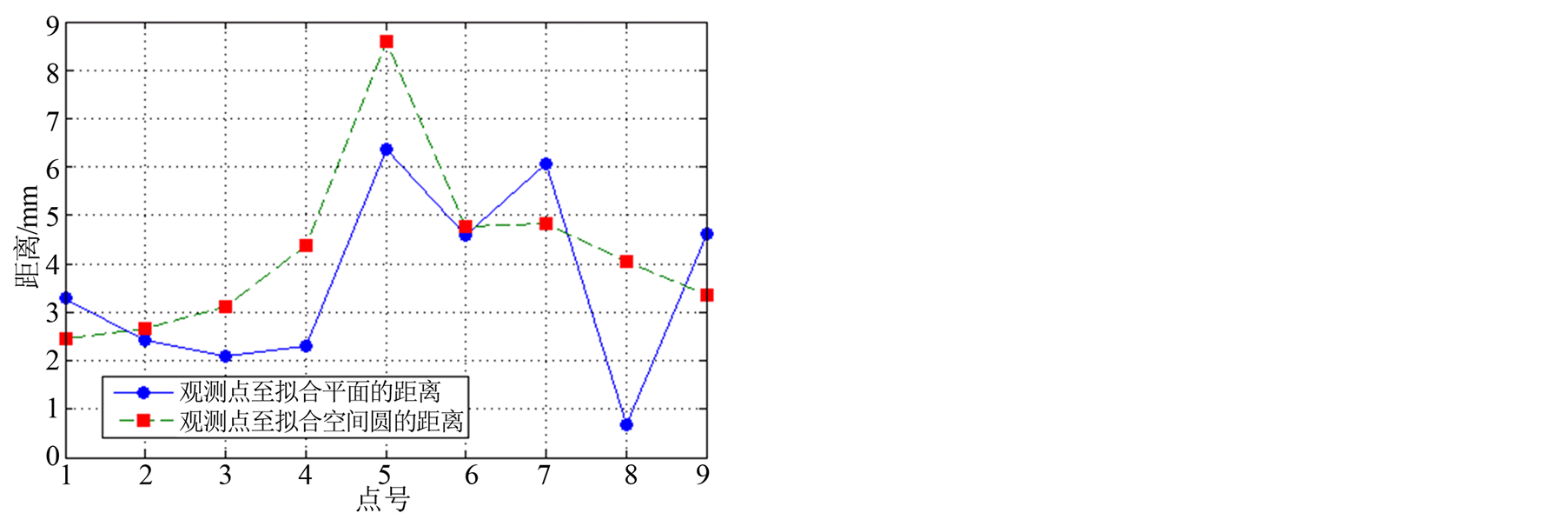
Figure 2. Distance between observation points and fitting plane, and distance between observation points and fitting space circle
图2. 观测点到拟合平面和拟合空间圆的距离
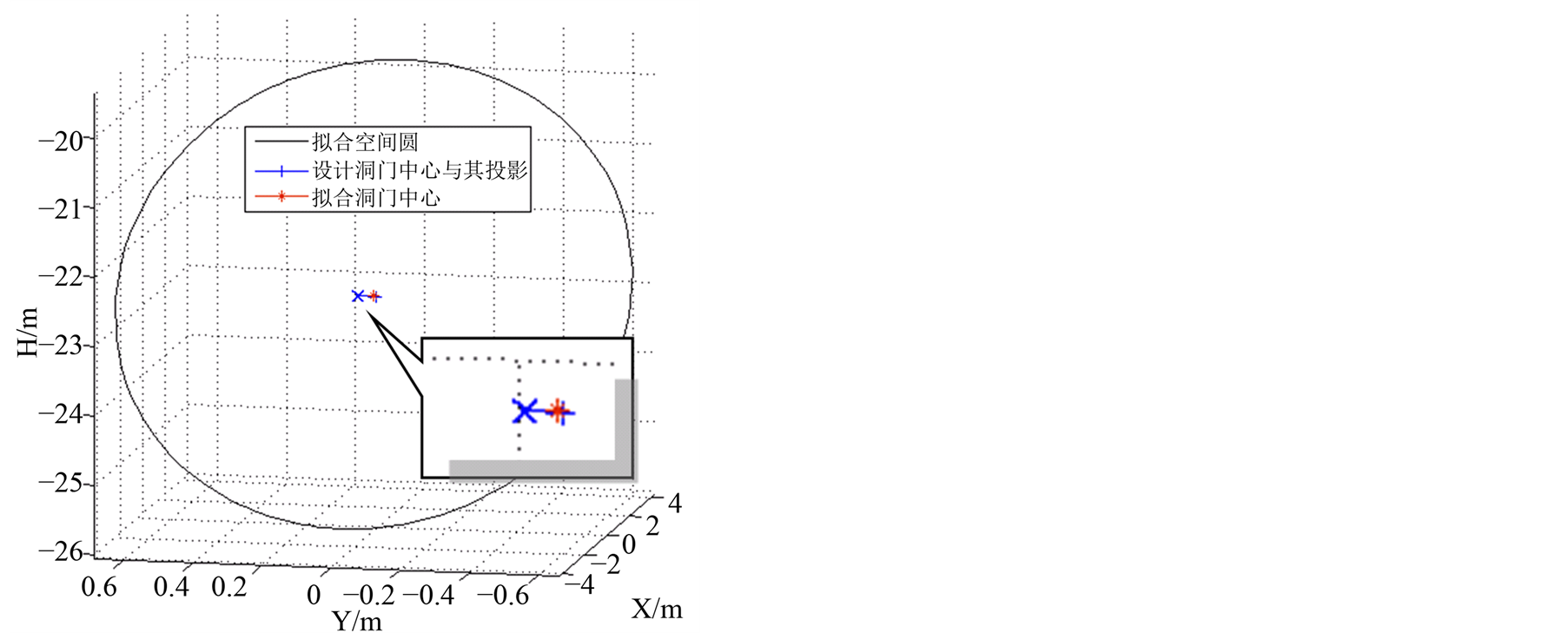
Figure 3. The sketch map of the center of fitting tunnel portal position and design portal position
图3. 拟合洞门中心与设计洞门中心位置示意图

Table 1. The coordinates difference table
表1. 坐标较差表
设计洞门中心(图中X点)沿设计线路中线方向在拟合洞门上的投影点(图中+点)与拟合洞门中心(图中*点)的较差如表1所示,由表1可知,拟合洞门中心与设计洞门中心的投影点比较更为恰当、合理。
通过实测成果可以看出,本文提出的基于空间圆拟合的洞门检测方法能够更便捷、更合理的计算出盾构洞门位置和姿态信息,并能与洞门设计中心及其投影点进行更恰当、更精准的比较。为盾构机入洞、出洞提供了更精确的测量数据基础。
- [1] 中华人民共和国建设部 (2008) 城市轨道交通工程测量规范. 中国建筑工业出版社, 北京.
- [2] 张益泽, 王解先 (2011) 建筑物的平面拟合和质量检测. 工程勘察, 9, 79-81.
- [3] 王旭华, 刘宇辰 (2013) 基于平面拟合的高层建筑物倾斜观测新方法. 测绘通报, 3, 73-74
- [4] 程效军, 李巧丽 (2008) 高精度电子全站仪NET1200点位精度测试. 测绘通报, 4, 8-11
- [5] 潘国荣, 谷川, 施贵刚 (2007) 空间圆形物体检测方法与数据处理. 大地测量学与地球动力学, 3, 28-30.
- [6] 刘保柱, 苏彦华, 张宏林 (2010) MATLAB 7.0从入门到精通. 人民邮电出版社, 北京.
- [7] 同济大学数学系 (2007) 高等数学. 高等教育出版社, 北京.
- [8] 崔希璋, 等 (2001) 广义测量平差(新版). 武汉大学出版社, 武汉.
- [9] 李波, 刘升婷, 李燕 (2013) AutoCAD土木工程制图从入门到精通. 机械工业出版社, 北京.