Journal of Sensor Technology and Application
Vol.2 No.04(2014), Article
ID:14312,9
pages
DOI:10.12677/JSTA.2014.24005
Control System of a Feet-Wheeled Inverted Pendulum Based on Double Closed-Loop PID Controller Combined with PSO
School of Automation, Northwestern Polytechnical University, Xi’an
Email: qushiru@nwpu.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Sep. 2nd, 2014; revised: Oct. 4th, 2014; accepted: Oct. 15th, 2014
ABSTRACT
In order to solve the feet-wheeled inverted pendulum’s stability control problem, a control system of a feet-wheeled inverted pendulum based on double closed-loop PID controller combined with particle swarm optimization is proposed. In addition, we designed a cost function related to the control effect to increase the stability of the control system. Under matlab simulation conditions, stable control of the feet-wheeled inverted pendulum was achieved. Experimental results showed that after tuning, the step response of the controller parameters was better than that of the original parameters with the rise time and the settling time was shorter than that of the non-tuning PID controller. This algorithm has been applied to a vertical intelligent search-identify-sampling system based on the area CCD, showing the availability of the PSO-PID controller.
Keywords:Feet-Wheeled Inverted Pendulum, PID, PSO

采用双闭环PID控制及PSO算法的双足轮式倒立摆控制系统
曲若彤,李聪慧,曲仕茹
西北工业大学,自动化学院,西安
Email: qushiru@nwpu.edu.cn
收稿日期:2014年9月2日;修回日期:2014年10月4日;录用日期:2014年10月15日

摘 要
为了解决双足轮式倒立摆的稳定控制问题,提出一种采用双闭环PID的控制器及粒子群优化算法(Particle swarm optimization, PSO)的双足轮式倒立摆控制系统,并设计与控制效果相关的代价函数,以增加控制系统的稳定性,在matlab仿真条件下,实现了双足轮式倒立摆的稳定控制,实验结果表明,经过整定的控制器参数较原参数的阶跃响应更好,上升时间和稳定时间较未整定PID控制器的短,并且本算法已经应用到基于面阵CCD的直立式智能搜索识别采样系统中,验证了PSO-PID控制器的可用性。
关键词
双足轮式倒立摆,PID,粒子群优化

1. 引言
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是控制理论发展中的一个典型问题[1] 。目前,通过倒立摆系统验证过的许多控制方法在航天、机器人以及一般工业过程领域均有着广泛的应用。如航天飞机的姿态控制,机器人行走过程中的平衡控制等,故倒立摆系统控制实验已成为控制理论界学者研究的热点。倒立摆控制系统是进行控制理论教学及开展各种控制实验的理想实验平台,其作为典型的非线性、强耦合、多变量控制系统,要求控制系统应当具有良好的稳定性、,鲁棒性以及随动性等性能[2] 。许多学者对倒立摆的控制也提出相应的控制方案,其中较为典型是根据牛顿力学等原理建立倒立摆的数学模型后实施不同的控制策略的方案,而上述方案的一个普遍特点是需要建立复杂的数学模型,并且模型都是在忽略空气阻力和摩擦力的前提下建立的,同时控制方案的实施都是依托PC机实现,控制成本较高,不适合倒立摆系统的实际应用控制[3] 。为了提高倒立摆控制系统的实用性,同时简化控制难度和降低控制成本,本文采用双闭环PID的控制器及粒子群优化算法的双足轮式倒立摆控制系统,并设计与控制效果相关的代价函数,以增加控制系统的稳定性,在matlab仿真条件下,实现了双足轮式倒立摆的稳定控制,研究以MC9S12XS128 单片机为控制器。实现双足轮式倒立摆基于面阵CCD的直立式智能搜索识别采样系统中项目中的应用。
双足倒立摆是在倒立摆的基础上,在其底端安置相互独立、并且能够提供动力的两轮,使倒立摆能够脱离传统的台式平台结构,只需平整地面即可进行相关的数据实验[4] 。这种双足轮式倒立摆工程意义深远,目前已经有比较完善的双足轮式代步工具,其产品的本质即为此类倒立摆。目前对双足轮式倒立摆的研究主要集中在控制器设计及平台应用研究上,作为工程产品,常用的PID控制器参数在大多数情况下难以满足需求,因此本文以此为出发点,提出使用粒子群优化算法,整定双子轮式倒立摆的控制器参数,以期获得更好的控制效果。
在此,本文首先根据双轮倒立摆的物理特性,推导了系统的运动状态方程,然后根据方程特性设计双闭环PID控制器,使用粒子群优化算法,整定双子轮式倒立摆的控制器参数,并将其应用到双轮倒立摆的PID控制器参数整定中。实验结果表明,经过整定的控制器参数较原参数的阶跃响应更好,上升时间和稳定时间较未整定PID控制器的短,并且本算法已经应用到基于面阵CCD的直立式智能搜索识别采样系统项目中(需要具体更改的内容),验证了PSO-PID控制器的可用性。
2. 双轮倒立摆建模
倒立摆系统的模型如图1所示,在直角坐标系中,小车前进的方向为X轴正向,两轮的轴线方向为Z轴,垂直于X-Z平面的轴为Y轴,正方向向上。小车绕Y轴的旋转方向符合左手定则,小车摆杆绕Z周的转角![]() 符合左手定则。
符合左手定则。
如图1所示,系统在平面运动具有三个自由度,它们分别是:绕Z轴、Y轴旋转,沿X方向移动。
系统模型参数如表1所示:
结合瑞士联邦工学院Aldo D’arrigo等人[5] [6] 对两轮式移动倒立摆的分析,以及牛顿力学方法对系统进行受力分析,根据力学方程获得双轮移动倒立摆的系统模型,从而获得如下8个约束方程。
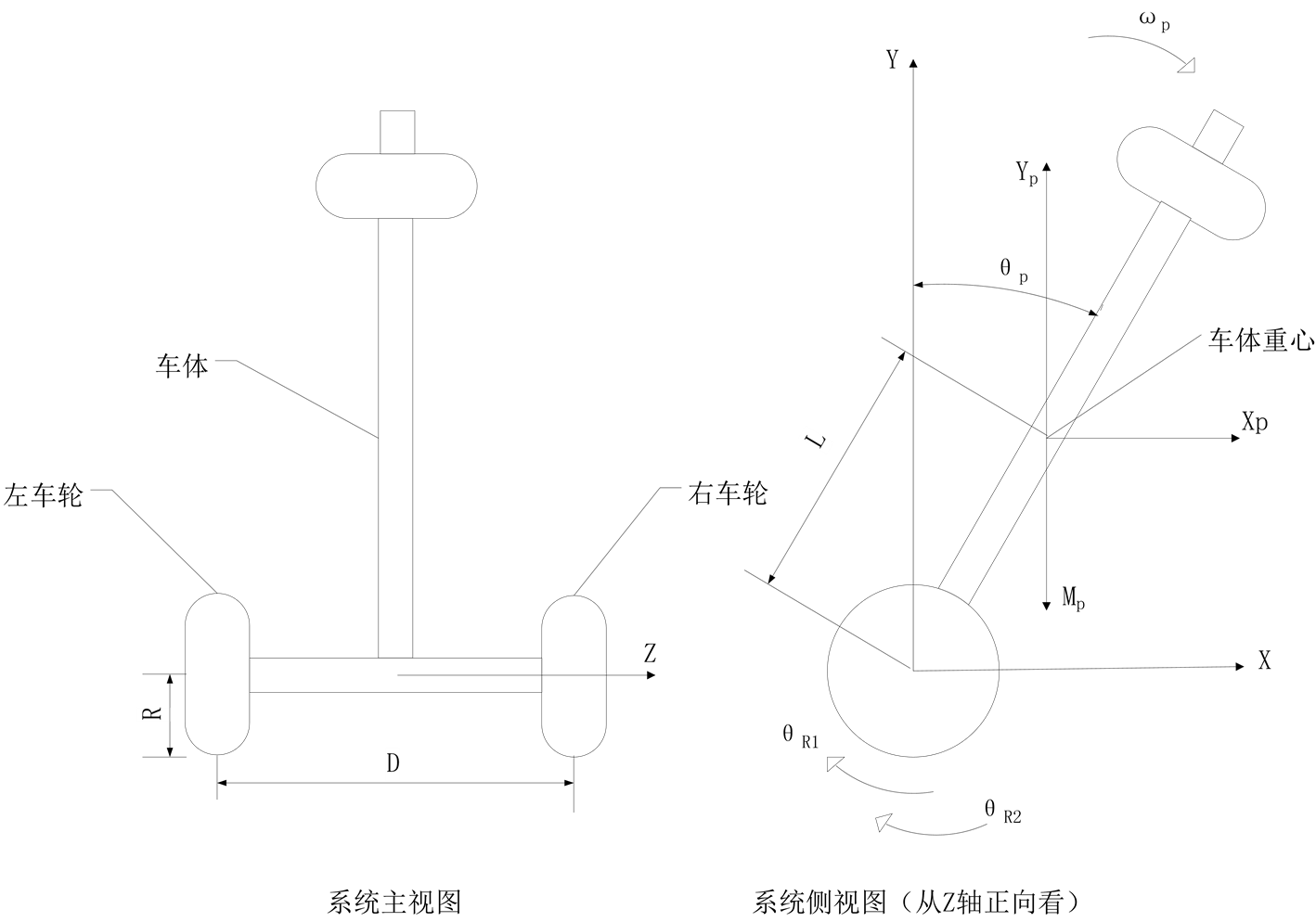
Figure 1. Inverted pendulum system model
图1. 倒立摆系统模型

Table 1. Parameters list of the System model
表1. 系统模型参数列表
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
其中XRL和XRR为半径为R转角为theta时的位移,D为双轮的位移差导致delta转角的直径,XRM为双轮的位移和,(thetap)为倒立摆和水平面的夹角,L为的高度。
对系统的组成部分进行受力分析,结合牛顿第二定律,列写如下方程:
左轮沿X轴方向:
 (9)
(9)
右轮沿X轴方向
 (10)
(10)
左轮绕Z轴:
 (11)
(11)
右轮绕Z轴:
 (12)
(12)
车体沿X轴:
 (13)
(13)
车体沿垂直方向Y轴:
 (14)
(14)
车体绕通过质心且平行于Z轴的轴:
![]() (15)
(15)
其中 为电机对左右车轮的转矩。
为电机对左右车轮的转矩。
车体绕Y轴:
![]() (16)
(16)
由 二阶求导得:
二阶求导得:
 (17)
(17)
由 二阶求导得:
二阶求导得:
 (18)
(18)
由 ,二阶求导得:
,二阶求导得:
 (19)
(19)
由 二阶求导得:
二阶求导得:
 (20)
(20)
 (21)
(21)
其中, 分别是左右轮对车体沿X方向的作用力;
分别是左右轮对车体沿X方向的作用力; 分别是地面对左右车轮的支撑力;
分别是地面对左右车轮的支撑力; 分别是地面对左右车轮的摩擦力,M为轮子的质量,J为转动惯量。
分别是地面对左右车轮的摩擦力,M为轮子的质量,J为转动惯量。
 在
在![]() 接近为0时,可以忽略,从而获得系统状态方程如下:
接近为0时,可以忽略,从而获得系统状态方程如下:
 (22)
(22)
其中,


需要指出的是,在建模过程中为了降低系统的复杂度,在平衡点附近进行了线性化近似。由于两轮式倒立摆系统本身是一个非线性的系统,线性化之前的方程过于复杂,求解过程繁琐,同时为了实现系统的控制,进行了线性化处理,在小角度范围内,取 。
。
除此之外, 是车体绕垂直方向轴的转动惯量,它的值还与
是车体绕垂直方向轴的转动惯量,它的值还与![]() 有关,因为系统在运行中
有关,因为系统在运行中![]() 在一个较小的角度范围内不断变化。为了简化,我们取
在一个较小的角度范围内不断变化。为了简化,我们取 来代替
来代替 的值,以简化系统的计算。
的值,以简化系统的计算。
电机转矩![]() 和控制电压
和控制电压 的关系为:
的关系为: ,其中
,其中 为电机的力矩系数和反电动势系数。将该式带入状态方程得到如下状态空间方程:
为电机的力矩系数和反电动势系数。将该式带入状态方程得到如下状态空间方程:
 (23)
(23)
 (24)
(24)
系统的具体参数为见表2。从系统的状态空间方程能够发现,双轮倒立摆的姿态控制和旋转角度控制是相互独立的,由此可以设计双闭环的PID控制器,来保证系统自身稳定及姿态角度旋转的实现。
3. PSO-PID控制器设计
双轮倒立摆自身无法稳定,需要设计控制器使系统稳定。随着数字计算机的快速普及以及设计简单等特点,PID控制器在工业中使用率很高,然而长期困扰控制器设计人员的问题是PID控制器参数的整定。为了设计能够使双轮倒立摆稳定的PID控制器,本文采用粒子群优化算法对PID控制参数进行优化,算法的整体结构图如图2所示。
考察系统的状态空间表述,确定倒立摆系统需要控制的状态量为 通道及
通道及![]() 变量,控制量分别为
变量,控制量分别为 和
和 ,因此系统是全驱动的,从而可以设计独立双闭环的PID控制器。控制器设计需要满足系统的稳定性,快速性和可实现性,因此,提取代价函数
,因此系统是全驱动的,从而可以设计独立双闭环的PID控制器。控制器设计需要满足系统的稳定性,快速性和可实现性,因此,提取代价函数![]() ,如下所示:
,如下所示:
 (25)
(25)
其中, 是权系数,作用是调节各个参与项对代价函数的影响,设定权系数的原则是基本保证加权后的参与项数量级能够保持一致;
是权系数,作用是调节各个参与项对代价函数的影响,设定权系数的原则是基本保证加权后的参与项数量级能够保持一致; 为系统的上升时间,
为系统的上升时间, 为系统的误差,
为系统的误差, 为系统的控制量,这样设计的代价函数能够满足快速性,稳定性和物理可实现性的要求。
为系统的控制量,这样设计的代价函数能够满足快速性,稳定性和物理可实现性的要求。
为了在解空间内找到最合适的参数组合,结合代价函数设计粒子群优化算法,从而解决系统的参数整定问题。
粒子群优化算法具有独特的搜索机制,首先在可行解空间和速度空间随机初始化粒子群,即确定粒子的初始位置和初始速度,其中位置用于表征问题解[7] [8] 。例如,![]() 维搜索空间中的第
维搜索空间中的第![]() 个粒子的位置和速度可表示为
个粒子的位置和速度可表示为 和
和 。通过评价各微粒的代价函数,确定
。通过评价各微粒的代价函数,确定 时刻每个粒子所经过的最佳位置
时刻每个粒子所经过的最佳位置 及群体发现的最佳位置
及群体发现的最佳位置![]() ,再按式进行各个粒子的速度和位置更新。
,再按式进行各个粒子的速度和位置更新。
Table 2. Parameters of the system
表2. 系统参数
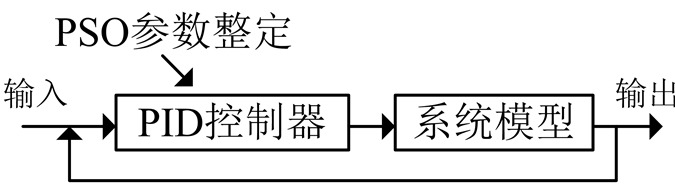
Figure 2. PSO-PID controller
图2. PSO-PID控制器设计
 (26)
(26)
 (27)
(27)
其中, 为惯性权因子,
为惯性权因子, 和
和 为正的加速常数,
为正的加速常数, 和
和 为在0和1之间均匀分布的随机数。另外可以引进压缩因子,这种调整方法通过合适选取参数,可以确保粒子群算法的收敛性,并可以取消对速度边界的限制。
为在0和1之间均匀分布的随机数。另外可以引进压缩因子,这种调整方法通过合适选取参数,可以确保粒子群算法的收敛性,并可以取消对速度边界的限制。
 (28)
(28)
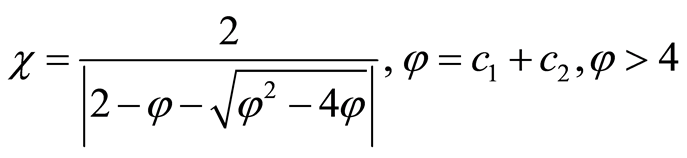 (29)
(29)
特别地,当 和
和 都等于2.05时,
都等于2.05时, 且
且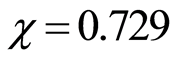 。
。
基本粒子群优化算法流程如下。
步骤1 随机初始化种群中各粒子的位置和速度。如果搜索空间为![]() 维,则每个微粒中包含
维,则每个微粒中包含![]() 个变量。
个变量。
步骤2 评价种群中所有粒子,将当前各粒子的位置和目标值存储于各个粒子的最优值中,将所有最优值中最好的个体位置及目标存储于群体最优值中。
步骤3 按照算法更新各个粒子的速度和位置。
步骤4 评价种群中的所有粒子。
步骤5 比较种群中每个粒子当前目标值和其最优值,如果当前值更好,则用粒子的当前位置和目标替换最优值的信息。
步骤6 比较当前所有最优值和群体最优值,更新群体最优值。
步骤7 如果终止准则满足,则输出群体最优值及具体位置信息并终止算法,否则转向步骤3。
4. 仿真实验
依赖式(24)的代价函数表现形式,取权系数分别为100,1和0.001,此时代价函数受上升时间、偏差及控制量的影响比重在一个数量级上。图3及图4分别为姿态控制和角度控制的代价函数迭代过程。从迭代结果中可以发现,算法最终都收敛到相比初始值小5%左右,实现了寻优的作用,图3中的进化过程
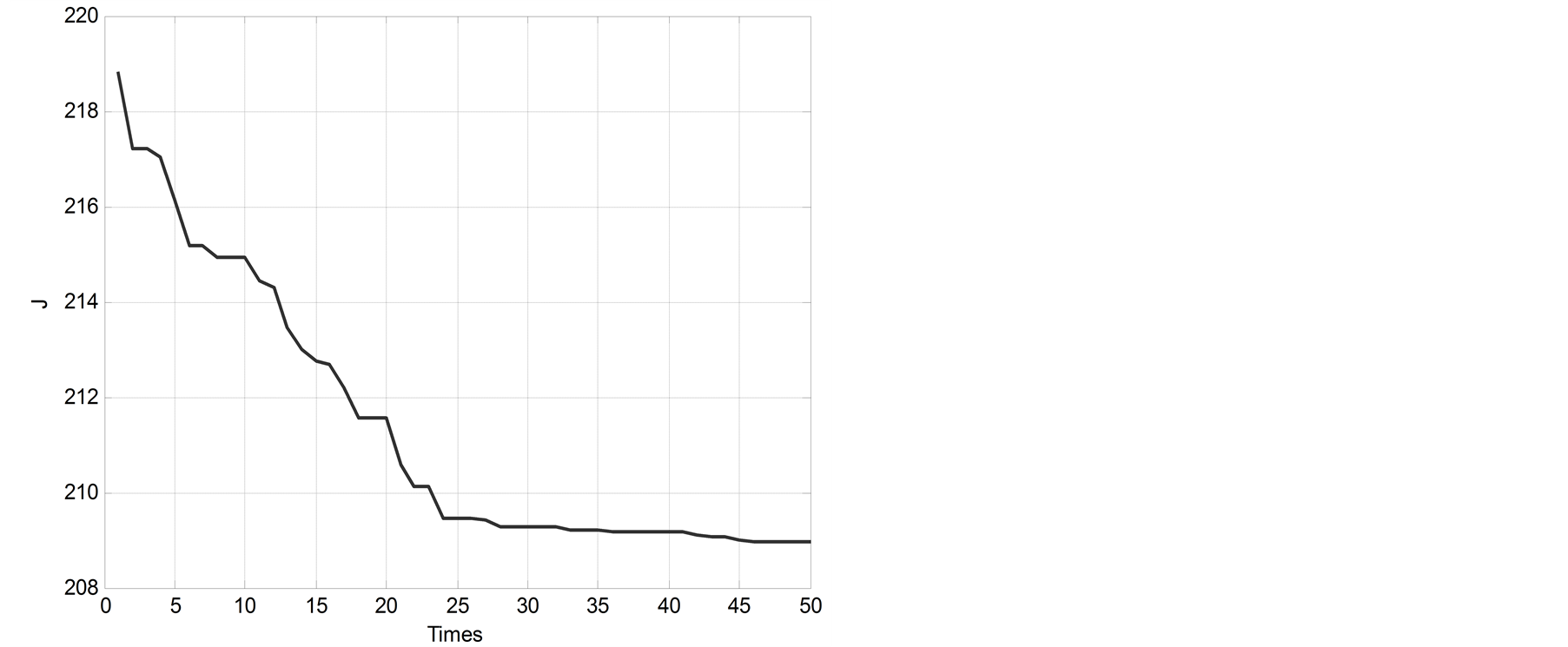
Figure 3. Iterative process of cost function of attitude control
图3. 姿态控制的代价函数迭代过程
相比图3收敛慢,原因在于姿态控制中的PID参数有6个,而角度控制中的参数只有3个,从寻优解空间角度解释为:在高维空间寻找最优解的难度相比低维空间要高,耗时也更多。计算时间上统计为:姿态控制优化过程中,种群数为300,迭代50代共耗时32.9秒,而角度控制优化过程中,种群数为300,迭代50代共耗时15.76秒。从统计数据上可以发现,采用粒子群优化参数过程中,需要寻优的参数越多,维度越高,耗时成比增长,为了降低耗时,可以考虑降低种群数,在本实验中,使用的是离线算法,不需要特别考虑实时性控制的问题,所以种群数定为300是合理的,同时也能够解决参数整定的问题。
图5和图6表示的是车体姿态的保持曲线。图5中未整定PID控制器上升时间比PSO整定过的PID控制器更小,PSOPID控制器的稳定时间更短;从图6可以看出,PSOPID控制器的超调更小,对车身姿态的保持更为有利。图7中的曲线描述了车体角度的控制,同车轮相应类似,也是优先考虑了上升时间,更加快速完成了角度的调整,实现了控制的要求。
通过上述实验结果可以发现,利用粒子群优化算法能够有效改善控制效果,在保证系统稳定可控的前提下,根据各个控制环节,选择不同的侧重,提高整体的控制效果。
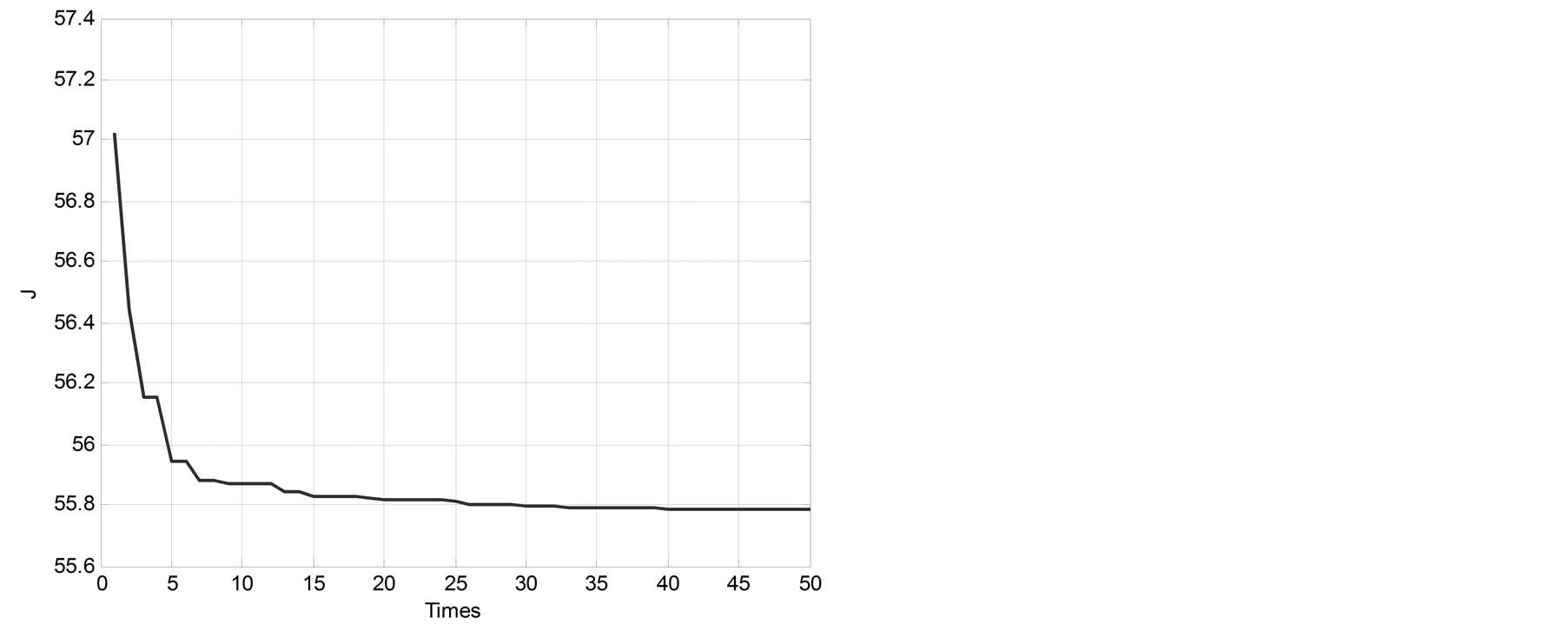
Figure 4. Iterative process of cost function of angle control
图4. 角度控制的代价函数迭代过程
Figure 5. Curve of wheel rotation state controlling
图5. 车轮转动状态的控制曲线
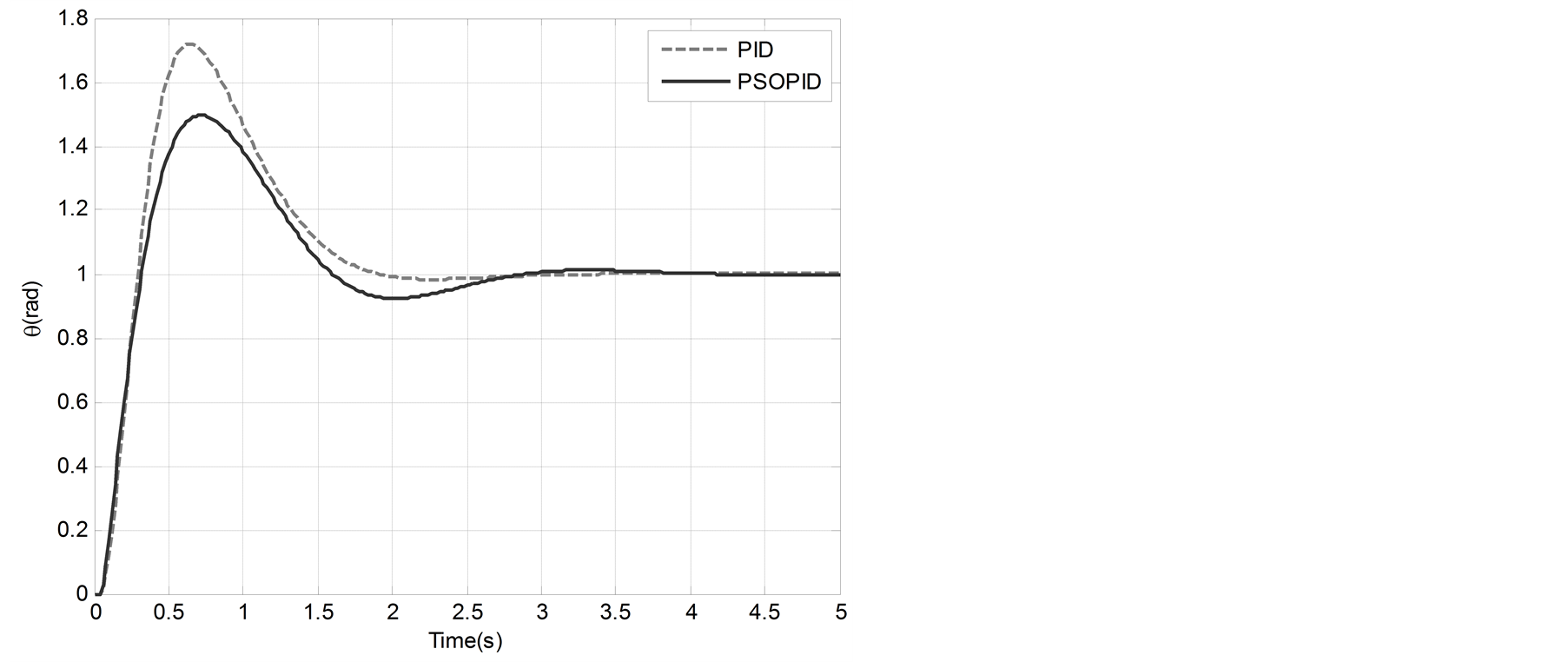
Figure 6. Curve of vehicle posturecontrolling
图6. 车体的姿态控制曲线
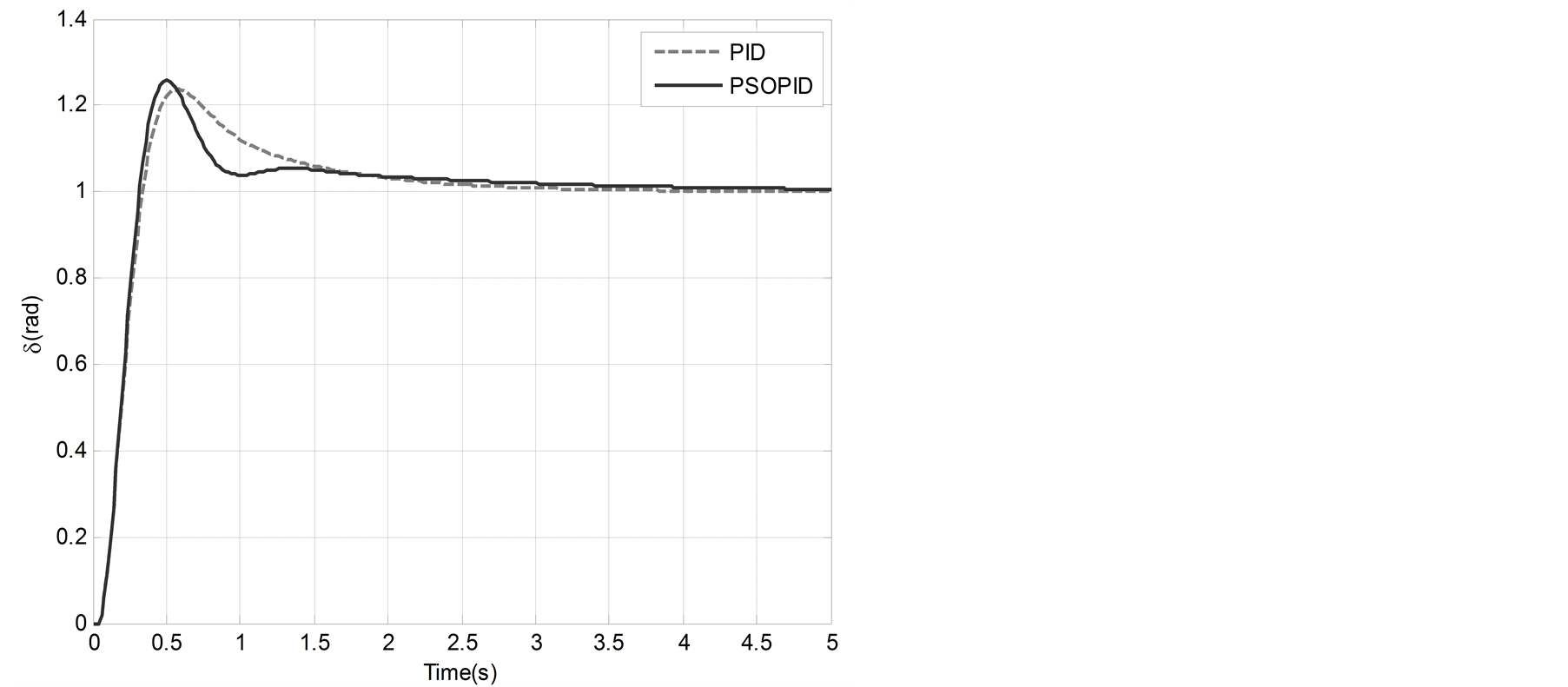
Figure 7. Curve of vehicle angle controllin
图7. 车体的角度控制曲线
基金项目
2013年国家级大学生创新创业训练项目;编号:201310699052。
参考文献 (References)
- [1] 段旭东, 许可 (2002) 单级旋转倒立摆的建模与控制仿真.机器人技术与应用, 5, 43-45.
- [2] 贾荣从 (2007) 基于双足机器人的倒立摆系统的研究. 硕士学位论文, 山东大学, 济南.
- [3] 叶建斌, 郭鸿武 (2011) 三级倒立摆的LQG最优控制应用研究. 计算技术与自动化, 3, 9-13.
- [4] 王春民, 栾卉, 杨红应 (2009) 倒立摆的设计与仿真.吉林大学学报(信息科学版), 27, 242-247.
- [5] Kuo, A.D., Donelan, J.M. and Ruina, A. (2005) Energetic consequences of walking like an inverted pendulum: stepto-step transitions. Exercise and Sport Sciences Reviews, 33, 88-97.
- [6] Li, J., Xueshan, G., Huang, Q., et al. (2008) Controller design of a two-wheeled inverted pendulum mobile robot. IEEE International Conference on Mechatronics and Automation, ICMA 2008, 7-12.
- [7] Susuki, R., Kawai, F., Nakazawa, C., et al. (2008) Parameter optimization of model predictive control using PSO. Proc SICE, 20-22 August 2008, Tokyo, 1981-1988.
- [8] Dong, N., Chen, Z.Q., Sun, Q.L., et al. (2009) Particle swarm optimization algorithm for model predictive control with constraints. Control Theory &Applications, 26, 965-969.