Mechanical Engineering and Technology
Vol.06 No.01(2017), Article ID:20136,10
pages
10.12677/MET.2017.61010
Kinematic Calculation and Simulation of a Low Scattering Metal Pylon
Jiaxing Hou, Wuyi Chen
School of Mechanical Engineering and Automation, Beihang University, Beijing

Received: Mar. 11th, 2017; accepted: Mar. 28th, 2017; published: Mar. 31st, 2017

ABSTRACT
A low scattering metal pylon, mainly used for target supporting in electromagnetic scattering measurement, is important to design and manufacture stealth weapons. The target positioning structure and overall stiffness of the pylon are very important when the RCS measurement is carried out in the compact range. This paper analyzed the structural characteristics of an oval metal pylon and calculated position parameters of the space rotating shaft. We obtained the curve of motion by mechanical analyses under a 200 Kg load and a kinematic simulation using ADAMS, and the curve provides an effective reference for the design and manufacture of driving devices of such metal pylons.
Keywords:Electromagnetic Scattering, Metal Pylon, Kinematics Calculation, Simulation Analysis
一种低散射金属支架的运动学计算及仿真
侯家兴,陈五一
北京航空航天大学机械工程及自动化学院,北京
收稿日期:2017年3月11日;录用日期:2017年3月28日;发布日期:2017年3月31日

摘 要
低散射金属支架是隐身武器研制过程中的重要装备,主要用于电磁散射测量中的目标支撑。在紧缩场中对待测目标进行RCS测量时,目标定位结构形式及支架整体刚度性能非常重要。本文对橄榄形截面金属支架结构特点进行了分析,并计算了空间转轴位置参数。在200 kg载荷下进行力学分析,借助ADAMS对运动特性进行了仿真分析,得到了运动关系曲线,为此类金属支架原动装置的设计制造提供有效的参考依据。
关键词 :电磁散射,金属支架,运动计算,仿真分析

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在紧缩场中对飞行器等目标进行电磁散射测量需要一个可靠的目标支撑系统,目标支撑结构是最重要的背景噪声来源之一,这种支撑系统应具有较低的RCS (Radar Cross-Section,雷达散射截面)值,其结构的性能非常重要,使目标处于静区范围内,同时保证目标和地面之间有足够的距离,以降低地面耦合干扰回波,以便使测量数据可靠。
目前,主要有三种类型目标支撑结构,按照发展顺序分别是:泡沫塑料支架、高强度非金属吊线以及金属支架。泡沫塑料支架的主要优点是造价低,成型方便,有很低的RCS。缺点是强度低,稳定性差,不能胜任较大目标测量。高强度非金属吊线这种支撑结构需要的吊绳反射要比其他支撑物低,可以不破坏目标的表面结构,和目标的耦合很小,充分利用静区空间;缺点是要求吊绳需要具有较高强度,不易拉伸,可以支撑较重的物体,装载和方向调节不方便,受风、吊线张力等影响会出现摆动等不足,稳定性差,所以目前国内几乎没有单位使用。在测量中,由于支架的RCS随方位变化,支架的转动,使得应用背景发生变化,国外一些公司早在六十年代就开始研制高精度低反射金属支架系统 [1] 。金属支架的出现标志着目标支撑结构技术发展到一个新的阶段。金属支架具有良好的负载承受特性,装置容易实现,操作方便,通过改变支架的形状和涂覆吸波材料可以在一定范围内减小支架的回波。但是金属支架与目标会发生相互作用,金属支架的转台一般都安装支架内部,这样就可以把转台屏蔽起来,最大限度地减小了目标与转台的相互作用,这是前两类支架无法比拟的 [2] 。目前,泡沫塑料支架和金属支架使用得较为广泛。
美国在20世纪60年代已开始研究金属支架,国外相关文献仅给出橄榄形或者菱形是适用于低散射金属支架的截面形状,不含详细的理论或实验数据解释 [3] 。国内关于低散射金属支架的研究起步相对较晚,焦洪杰 [4] [5] 等提出了一个竹节仿生结构的金属支架设计,整体结构简单紧凑、安装定位方便,提高了整体刚度。薛明华 [1] 等提出了一种金属遮掩屏泡沫支架设计,其中小前倾角方案对降低总RCS十分有效;唐海正 [6] [7] 等仿造波音公司在橄榄形柱顶部放一个帽子,底部与橄榄形柱顶部光滑连接,从底部往上逐渐收缩,收敛成一尖顶;安大卫 [8] 等对金属支架的外形参数进行优化,对比不同截面外形RCS值及加载变形。
现有公开文献主要关注支架的低散射性。对支架的加载变形和动力学仿真计算研究较少。本文根据实际现场条件,通过矢量旋转矩阵计算支架起竖或放倒时旋转轴位置和支架绕该轴的转角。并对支架进行力学和运动学仿真,与理论数据进行对比,对于低散射金属支架设计制造工程化具有重要意义。
2. 低散射金属支架的基本结构
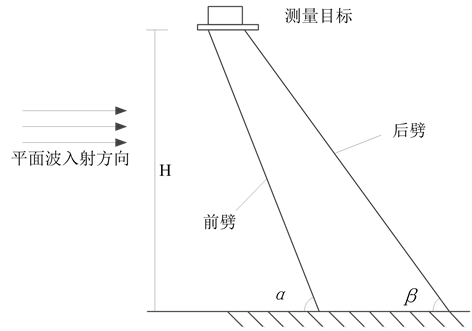
低散射金属支架的主体外形类似一个前掠机翼,是一个前后边缘向着入射波倾斜且上表面面积小于下表面面积的橄榄形截面柱。测量目标置于支架顶端,底部与驱动设备相连,金属支架基本结构如图1(a)
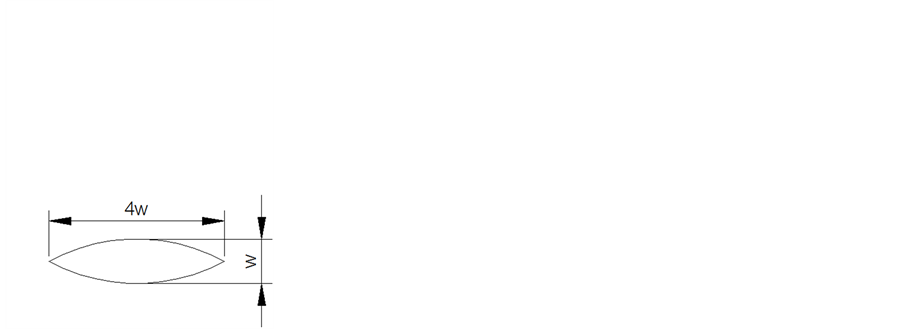
 (a) 金属支架基本结构 (b) 橄榄形截面形状
(a) 金属支架基本结构 (b) 橄榄形截面形状
Figure 1. The structure of metal pylon
图1. 金属支架结构
所示,橄榄形截面如图1(b)所示。低散射目标支架是一种优化结构,既要考虑支撑载荷对支架强度刚度的影响又要考虑低散射性。该种支架一般由高强度钢或铝构成,是一种金属硬壳或单壳体焊接结构,满足较大的结构刚度和较小自重的要求。支架的内部的运动机构可以带动目标做旋转、侧翻以及俯仰运动。金属支架的高度主要与紧缩场静区位置相关,可根据目标载荷重量调节金属支架的倾角α和β以及截面形状。一般的微波暗室中会配备几种不同的目标支撑装置,例如泡沫支架和天线转台等。所以低散射金属支架应可撤收,以便为别的支撑装置腾开空间。本文研究的支架采用了斜向倾倒的撤收方式,以避开正前方的转台。支架的倾倒和竖起采用电动缸驱动。
3. 支架空间转轴的计算
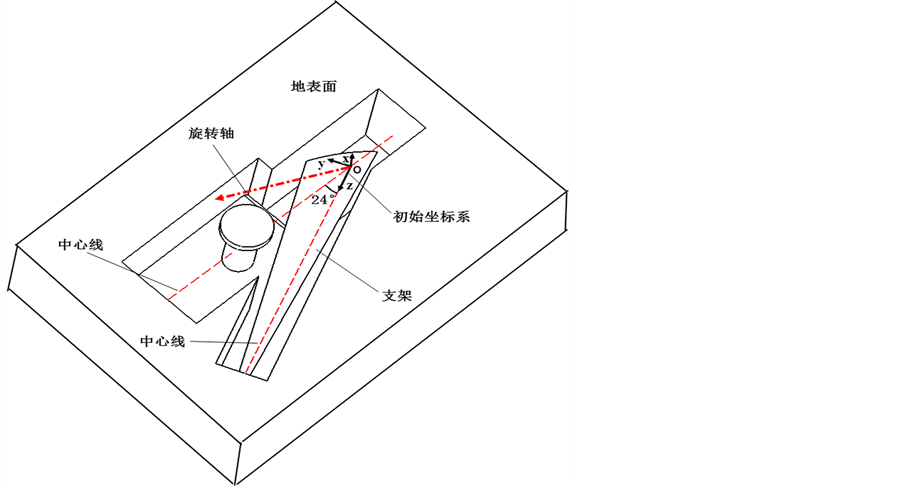
根据现场地坑尺寸,以及拟设计支架模型草图完成三维模型的构建。人字形地坑中线的夹角为24˚,如图2(a)所示。通过矢量旋转矩阵计算支架起竖或放倒时旋转轴位置和支架绕该轴的转角。支架在起竖状态下(即工作状态)的位置如图2(b)所示。
3.1. 计算欧拉角、欧拉旋转矩阵
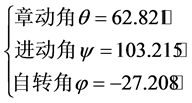
根据欧拉角定义,用来确定定点转动刚体位置的3个一组独立角参量,由章动角 、进动角
、进动角 和自转角
和自转角 组成。相应的得到欧拉旋转矩阵:
组成。相应的得到欧拉旋转矩阵:

支架的初始位置在地坑内,设初始坐标系为Oxyz,固连于支架的动坐标系OXYZ的起始位置与坐标系Oxyz重合,且该动坐标系随支架绕固定点O旋转而旋转,固定点O为人字形地坑两条轴线的交点,且yz平面在地下1242 mm平面上,如图2(a)所示,根据右手定则确定x轴位置。
始末位姿确定,根据欧拉角定义,始末轴系形成的欧拉角如图3所示,测量相应的欧拉角为:
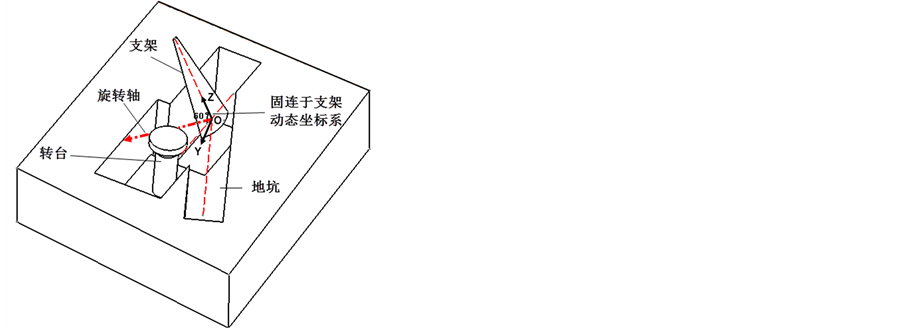
 (a) 支架放倒时的初始位姿及人字形地坑夹角 (b) 支架起竖时的位姿
(a) 支架放倒时的初始位姿及人字形地坑夹角 (b) 支架起竖时的位姿
Figure 2. The configuration when the pylon is laid down and erected
图2. 支架放倒和起竖时的状态
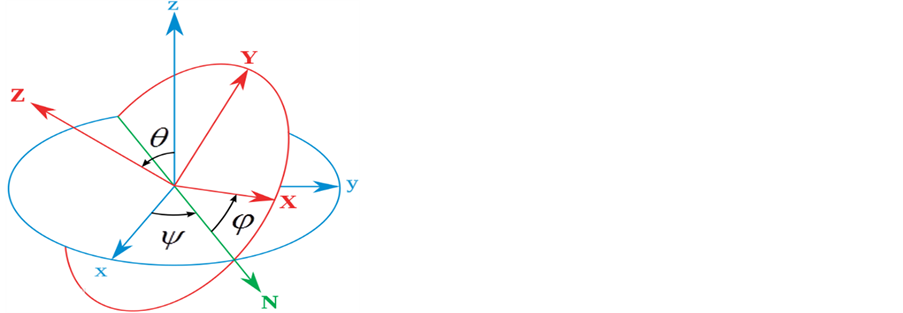
Figure 3. The Euler angle formed by the initial and final coordinate
图3. 始末轴系形成的欧拉角
由机器人运动学,任何一组绕过原点轴线的复合转动总等效于绕过原点的某一矢量的转动。假设上述组合转动等价于绕过原点的矢量 旋转角
旋转角 。
。

其中
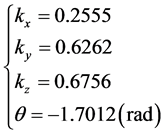
令欧拉旋转矩阵与绕空间矢量旋转得到矩阵相等,即 。设空间矢量为单位矢量,可列10个等式方程,在Matlab中进行计算。由于是超定方程组(方程个数大于未知数的个数),故利用最小二乘方法。在初始位姿坐标系下,单位化的转轴
。设空间矢量为单位矢量,可列10个等式方程,在Matlab中进行计算。由于是超定方程组(方程个数大于未知数的个数),故利用最小二乘方法。在初始位姿坐标系下,单位化的转轴 ,以及支架绕该轴的转角。
,以及支架绕该轴的转角。
将初始位姿坐标系下转轴的坐标转换到全局坐标系下,全局坐标系Ox'y'z'建立如图4所示,固定点O与初始位姿坐标系原点相重合,即人字形地坑两条轴线的交点,y'轴水平指向正前方,z'轴竖直向上,根据右手定则确定x'轴的位置,且x'y'平面在地下1242 mm平面上。
根据基变换和坐标变换理论,初始位姿坐标系的基用 表示,全局坐标系的基用
表示,全局坐标系的基用 表示。则三维线性空间两组基存在关系如下:
表示。则三维线性空间两组基存在关系如下:
根据两个坐标关系可得:
设在初始位姿坐标系下转轴坐标为 ,在全局坐标系下转轴坐标为
,在全局坐标系下转轴坐标为 所以
所以
又因为
因此
由Matlab计算结果可得
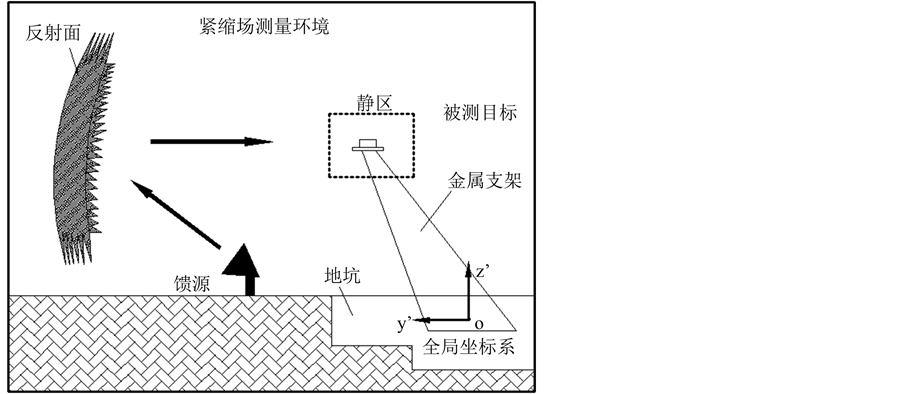
Figure 4. The global coordinate system of compact field
图4. 紧缩场全局坐标系

将初始位姿计算得到的旋转轴单位坐标转换到紧缩场全局坐标系下单位坐标为
根据全局坐标系下单位坐标求得通过该点和原点O的轴线方程为
4. 对支架进行力学仿真
4.1. 刚、强度分析
为了支架的使用安全,在一定目标载荷下对支架进行强度刚度分析,在支架顶端中心施加200 kg目标载荷查看支架变形情况,同时支架不能发生共振。金属支架是变截面梁,对于变截面梁的变形计算无法获得理论精确值,可以使用力学有限元软件ABAQUS计算。建立了橄榄形截面空心支架的三维模型,支架壁厚为10 mm,竖直投影高度H为5080 mm,材料参数取Q215碳素结构钢,弹性模量212 GPa,泊松比0.288,密度7690 kg/m3,使用六面体单元。进入静力分析模块对模型进行网格划分然后施加边界条件和载荷,选取底面前后4个点以及轴线与支架的交点固定约束,在支架顶端中心施加一个200 kg方向竖直向下的集中力模拟目标载荷。计算此时橄榄形截面形状支架的应力应变。支架的集中应力、最大变形和支架的安全系数如表1。
4.2. 动力学分析
模态分析用于确定设计结构或机器部件的振动特性,主要是计算固有频率和振型,它是动力学分析的基础,也是结构参数优化的目标。在结构振型中,由于高阶模态能量占比太低,对整个结构振动影响不大,所以低阶模态对支架系统的动态特性起决定性的作用。建立了橄榄形截面空心支架的三维模型,支架壁厚为10 mm,竖直投影高度H为5080 mm,材料参数取Q215碳素结构钢,弹性模量212 GPa,泊松比0.288,密度7690 kg/m3,使用六面体单元。设置分析步选择线性摄动频率,对模型进行网格划分

Table 1. Static analysis results and safety factor calculation of the pylon
表1. 支架静力学分析结果及安全系数计算
然后施加边界条件,选取底面前后4个点以及轴线与支架的交点固定约束,无需添加载荷。为此分析了该支架前3阶典型振型,如图5所示,具体频率值如表2所示。
通过对支架的静力学、动力学分析可得出如下结论:在200 kg载荷工况下,最大应力为13.59 MPa,主要发生在底部固定点处;最大变形为0.76 mm,主要发生在支架顶端,原设计支架的刚度、强度均满足要求。
5. 在Adams中进行运动仿真
根据已知条件,在CATIA中建立物理模型,为了便于仿真和观察,转台并未画出,并将该模型导入到Adams中,建立Adams的仿真模型,见图6。
在做机械结构的动力学分析仿真的过程中,MOTION驱动函数有时无法在ADAMS中直接找到。可以先对机械结构角度位置或速度等进行了外部规划,得出了机械结构转速与时间的一些相关数据,导入ADAMS,并利用ADAMS进行SPLINE插值,得到转速与时间的SPLINE函数,用于驱动仿真MOTION。
将所得到支架转速与时间的函数关系输入到电动缸的MOTION上,支架转动速度和时间图像如图7,加速度和时间关系如图8。
在仿真过程中,对支架模型进行适当微调整,确保无干涉现象。驱动力矩仿真结果如图9。
根据Adams仿真结果可以得出以下结论:在系统的几何参数固定的情况下,驱动力矩随着支架转动
Table 2. Dynamic analysis results of the pylon
表2. 支架动力学分析结果
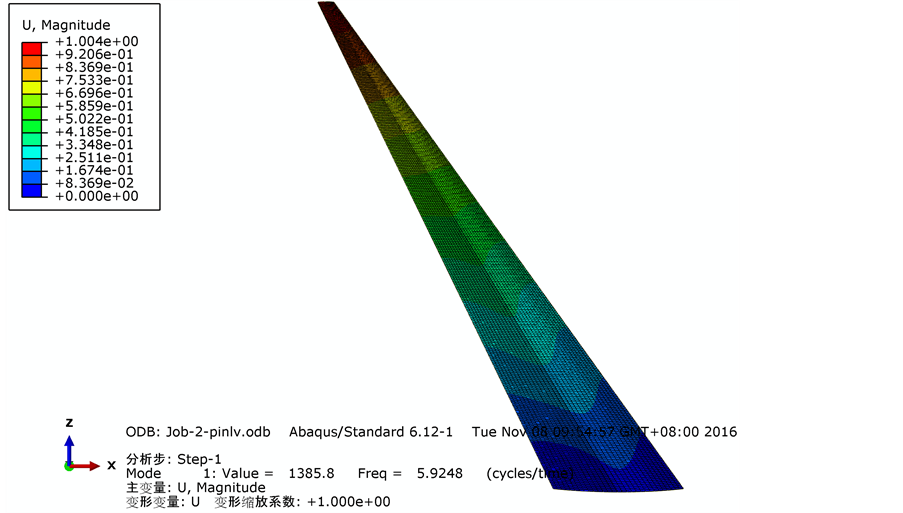 (a) 一阶模态
(a) 一阶模态
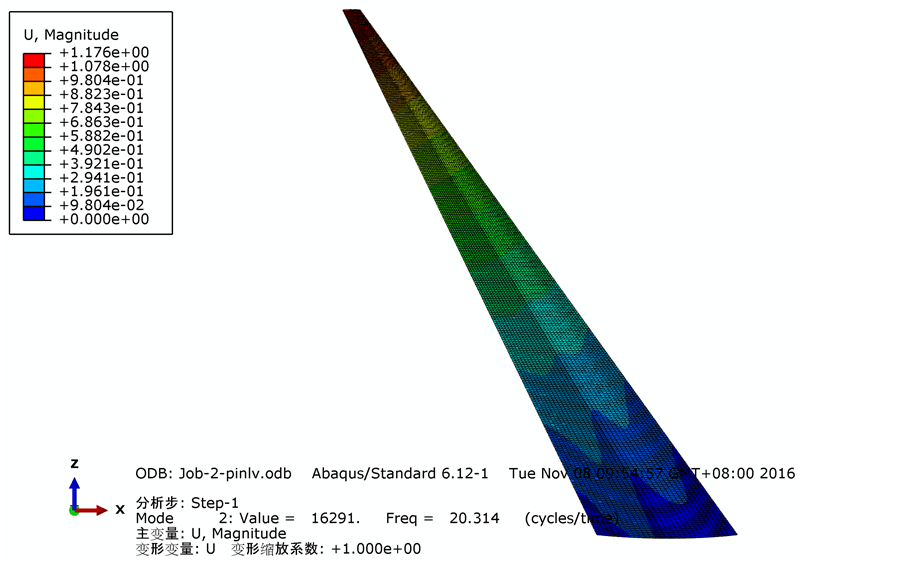 (b) 二阶模态
(b) 二阶模态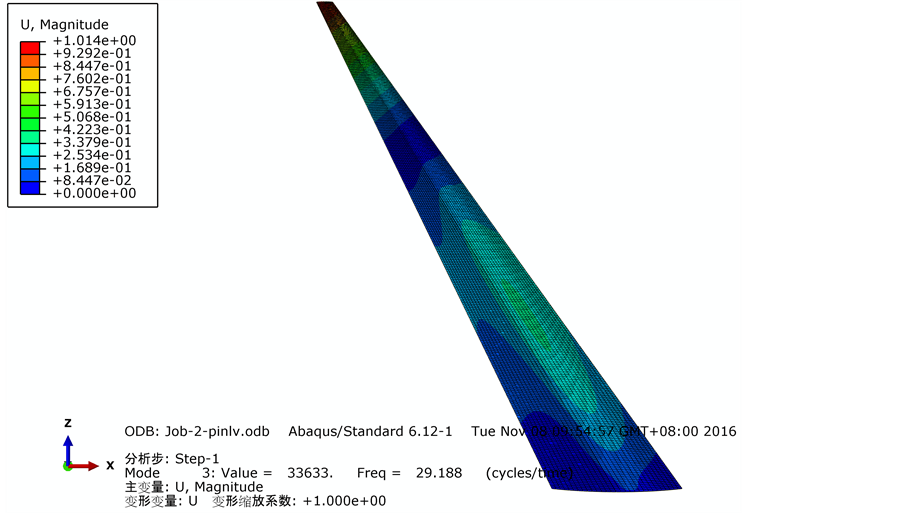 (c) 三阶模态
(c) 三阶模态
Figure 5. Modal shapes of various orders
图5. 各阶模态振型
角度变化而变化,随着转角的增加,驱动力矩的值先增大后减小,在支架转到0.3686 rad时驱动力矩达到最大约 ,在支架转到1.6959 rad时驱动力矩达到最小值
,在支架转到1.6959 rad时驱动力矩达到最小值 。在选取驱动设备时,只要输出的力不小于
。在选取驱动设备时,只要输出的力不小于 ,并配置在最优位置,即可满足本文翻转系统的需求。
,并配置在最优位置,即可满足本文翻转系统的需求。
6. 结论
本文总结低散射支架的类型,并根据现场条件,通过矢量旋转矩阵计算了支架起竖或放倒时旋转轴位置和支架绕该轴的转角,并将初始坐标系下转轴的坐标转换到全局坐标系下。同时支架作为一个受力复杂的框架结构,必须具有足够的刚度保证其装配和使用要求,具有足够的强度保证其疲劳寿命;同时应具备合理的振动特性。所以利用CAE 技术分析得出最大应力为13.59 MPa,主要发生在支架底部固定点处;最大变形为0.76 mm,主要发生在支架顶端。根据低阶振型的分析结果,外部驱动设备激振频率应避开支架振型仿真分析频率。通过理论计算与Adams仿真等多种途径,得到翻转机构所需的外部驱动设备的最大驱动力矩为 ;本文以对支架结构的理论分析为重点,在符合实际现场条件下,对支架的运动参数进行优化,从而使设计出的支架更为合理、高效,为此类金属支架原动装置的设计制
;本文以对支架结构的理论分析为重点,在符合实际现场条件下,对支架的运动参数进行优化,从而使设计出的支架更为合理、高效,为此类金属支架原动装置的设计制
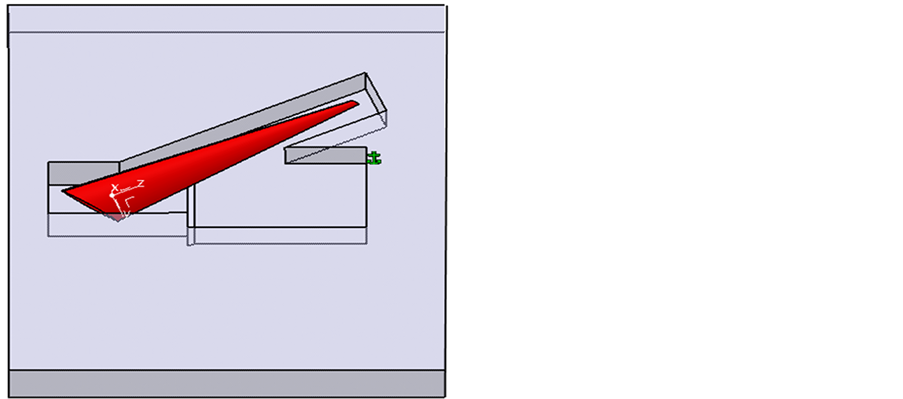
Figure 6. The physical model established in CATIA
图6. 在CATIA中建立的物理模型
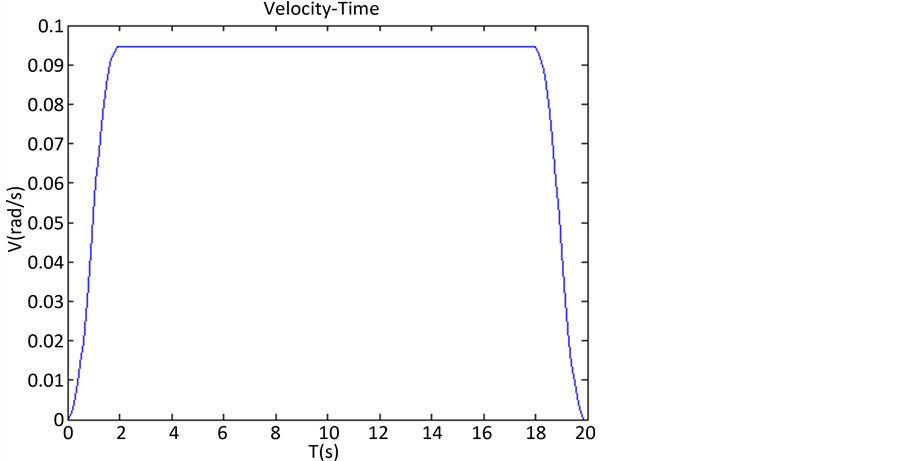
Figure 7. The diagram of angular velocity of pylon with respect to time
图7. 支架角速度–时间图像
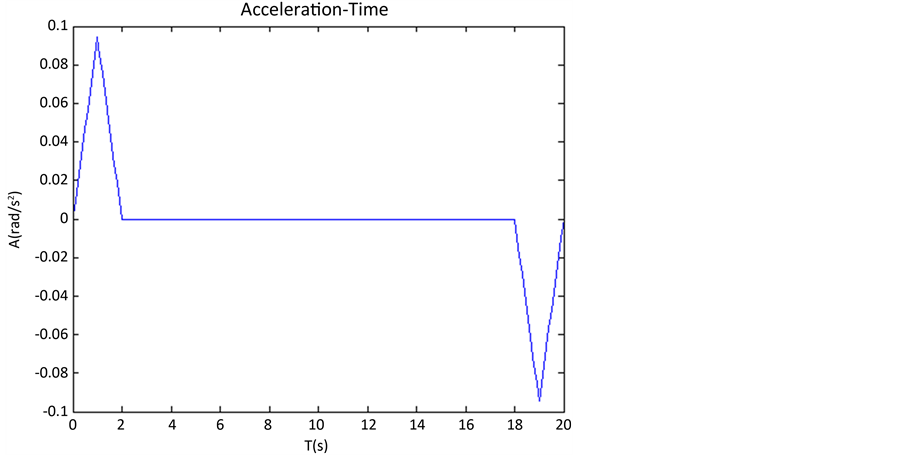
Figure 8. The diagram of angular acceleration of pylon with respect to time
图8. 支架角加速度–时间图像
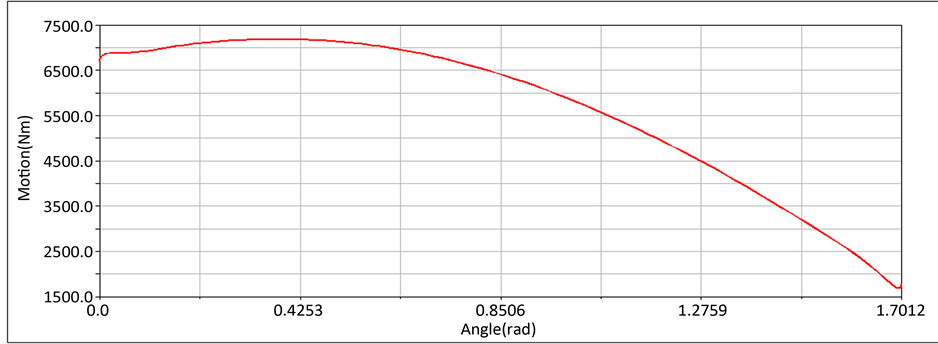
Figure 9. The diagram of driving torque of pylon with respect to its angle
图9. 驱动力矩与支架转角关系图像
造提供有效的参考依据。
文章引用
侯家兴,陈五一. 一种低散射金属支架的运动学计算及仿真
Kinematic Calculation and Simulation of a Low Scattering Metal Pylon[J]. 机械工程与技术, 2017, 06(01): 68-77. http://dx.doi.org/10.12677/MET.2017.61010
参考文献 (References)
- 1. 薛明华, 徐永斌. 遮掩式低回波金属支架的设计[J]. 微波学报, 1994(1): 51-54.
- 2. 马永光. 关于RCS测量中若干问题的研究[D]: [博士学位论文]. 北京: 北京航空航天大学, 2009.
- 3. Knott, E.F. (1993) Radar Cross Section Measurements. Proceedings of the IEEE, 27, 197.
- 4. 焦洪杰, 陈五一, 张以都. 飞行器隐身测试用低散射塔架结构及其制造工艺[J]. 航空制造技术, 2009(4): 86-89.
- 5. 焦洪杰. 紧缩场低散射塔架结构工程化设计研究[A]. Beihang University. 机械技术史及机械设计(6)——第六届中日机械技术史及机械设计国际学术会议论文集[C]. Beihang University, 2006: 6.
- 6. 唐海正, 徐长龙, 徐得名, 等. 一种新型目标支架的设计和分析[J]. 微波学报, 2000, 16(4): 434-439.
- 7. 唐海正, 徐长龙, 徐得名. 一种新型目标支架的设计和理论分析[J]. 上海大学学报(自然科学版). 2000(1): 11-14.
- 8. 安大卫, 李志平, 陈五一. 低散射目标支撑金属支架的外形参数优化[J]. 电讯技术, 2015(3): 333-339.