Mechanical Engineering and Technology
Vol.06 No.02(2017), Article ID:21212,9
pages
10.12677/MET.2017.62028
Study on the Influence Rules of Bacalash on Dynamic Load Sharing Behavior of a Planetary Gear Train
Shangzhen Sun1, Aimin Yao1, Tongjie Li2*, Jie Ma2, Juan Wang2
1Bengbu Planet Engineering Machinery Co. Ltd., Bengbu Anhui
2College of Mechanical Engineering, Anhui Science & Technology University, Chuzhou Anhui

Received: Jun. 11th, 2017; accepted: Jun. 26th, 2017; published: Jun. 30th, 2017

ABSTRACT
By using the method of numerical simulation, the influence rules of backlash on dynamic load sharing behavior of a planetary gear train are studied based on a nonlinear lateral-torsional vibration model. The simulation results reveal that backlash value dramatically affects the impact phenomenon of each gear pair, and then affects all load characteristic of the system. Within the scope of the inspection parameters, a relatively small backlash value can improve the sharing behavior characteristic.
Keywords:Planetary Gear Train, Nonlinear Lateral-Torsional Vibration Model, Bacalash, Dynamic Load Sharing Behavior
齿侧间隙对行星齿轮传动机构均载特性的影响规律研究
孙尚贞1,姚爱民1,李同杰2*,马杰2,王娟2
1蚌埠市行星工程机械有限公司,安徽 蚌埠
2安徽科技学院机械工程学院,安徽 滁州

收稿日期:2017年6月11日;录用日期:2017年6月26日;发布日期:2017年6月30日

摘 要
本文基于行星齿轮传动系统弯扭耦合非线性动力学模型,采用数值仿真的手段,研究了齿侧间隙对行星齿轮传动系统均载性能的影响规律。研究结果发现,齿侧间隙大小会显著影响各齿轮副的冲击现象进而影响系统的均载特性。在考察参数范围内,相对较小的间隙,可以改善均载特性。
关键词 :行星齿轮系,线性动力学模型,齿侧间隙,均载性能

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在行星齿轮传动系统的均载与动力学设计中,影响因素有很多。如果能从中找出影响系统均载特性的主要因素,并通过分析得到其变化规律,将会为整个传动系统的均载与动力学设计提供重要的理论基础和参考价值。
国内外专家学者对行星齿轮传动机构均载特性进行了较深入研究 [1] [2] 。Kahraman [3] 在考虑了齿轮的位置度偏差和齿形误差的基础上,对行星齿轮装置做了静态力学实验分析。肖铁英 [4] 提出了当量啮合误差、等效啮合刚度的概念,并给出了载荷不均匀系数的计算公式和计算方法。方宗德在文献 [5] 中采用傅里叶级数法研究了太阳轮完全浮动情况下行星齿轮传动系统的均载特性,但是其动力学模型没有考虑齿侧间隙的影响,因而是基于线性动力学模型开展的研究。孙涛 [6] 等基于行星齿轮系统弯扭耦合非线性动力学模型,研究了齿轮误差等系统参数对行星齿轮系统均载性能的影响规律。
目前,尚缺少齿侧间隙对行星齿轮传动机构均载特性影响规律的系统研究。本文以单排4行星轮2K-H型行星齿轮机构为研究对象,通过动力学建模、运动微分方程推导、数值仿真等研究过程,定性分析行星齿轮传动系统参数系统均载特性的影响规律。
2. 试验用单排行星齿轮机构的力学模型
试验用行星轮系动传动简图以及力学模型分别如图1和图2所示。图中,1为输入端,2为行星轮,3为行星架,4为输出端,5为中心轮,6为太阳轮。
3. 试验用单排行星齿轮机构的运动微分方程
假设系统的径向跳动公差(偏心误差)、同轴度误差(安装误差)以及齿轮误差(齿频误差)均为正弦变化,其变化幅值分别以 、
、 、
、 来表示,将以上各误差投影到各路啮合线上并叠加,可得内外路啮合副的综合啮合误差
来表示,将以上各误差投影到各路啮合线上并叠加,可得内外路啮合副的综合啮合误差 和
和 为
为
 (1)
(1)
式中,脚标s2pi——行星排第i路外齿轮副;
脚标r2pi——行星排第i路内齿轮副;
 ——第二路行星排第i路外齿轮副上静传递误差变化的初相位;
——第二路行星排第i路外齿轮副上静传递误差变化的初相位;
 ——行星排第i路内齿轮副上静传递误差变化的初相位;
——行星排第i路内齿轮副上静传递误差变化的初相位;
 ——行星排太阳轮偏心误差变化的初相位;
——行星排太阳轮偏心误差变化的初相位;
 ——行星排内齿圈偏心误差变化的初相位;
——行星排内齿圈偏心误差变化的初相位;
 ——行星排第i路行星轮偏心误差变化的初相位;
——行星排第i路行星轮偏心误差变化的初相位;
 ——行星排同路外内啮合副之间的相位差;
——行星排同路外内啮合副之间的相位差;
 ——行星排同路太阳轮安装误差的除相位差;
——行星排同路太阳轮安装误差的除相位差;
 ——行星排同路第i个行星轮安装误差的除相位差。
——行星排同路第i个行星轮安装误差的除相位差。
以行星架的中心为坐标原点,纵、横坐标轴固结在行星架上,建立与行星架一起转动的动坐标系。若以 表示太阳轮在动坐标系上的横向、纵向位移,则转化到啮合线上的等价位移可由下式确定。
表示太阳轮在动坐标系上的横向、纵向位移,则转化到啮合线上的等价位移可由下式确定。
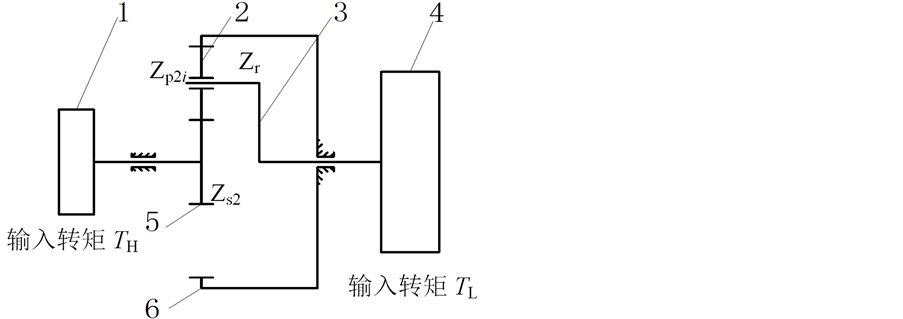
Figure 1. Diagram of planetary gear system
图1. 行星齿轮传动系统传动简图

Figure 2. Dynamic model of the system
图2. 行星齿轮传动系统动力学模
Tabel 1. Main parameters of the system
表1. 系统的主要参数
Tabel 2. Error parameters of the system
表2. 系统的主要误差参数
 (2)
(2)
式中, —第i个行星轮相对于
—第i个行星轮相对于 轴的初始角度,
轴的初始角度, 。
。
令太阳轮与第i ( )个行星轮之间的齿隙为
)个行星轮之间的齿隙为 ,综合啮合误差为
,综合啮合误差为 ;内齿轮与第i个行星轮之间的齿隙为
;内齿轮与第i个行星轮之间的齿隙为 ,综合啮合误差为
,综合啮合误差为 ,并以
,并以 与
与 分别表示太阳轮和内齿轮与第i个行星轮之间的啮合力,则
分别表示太阳轮和内齿轮与第i个行星轮之间的啮合力,则
 (3)
(3)
式中, 和
和 分别表示太阳轮和内齿轮与第i个行星轮之间的啮合刚度;f表示间隙非线性函数。
分别表示太阳轮和内齿轮与第i个行星轮之间的啮合刚度;f表示间隙非线性函数。
以 和
和 分别表示太阳轮和内齿轮与第i个行星轮之间的啮合阻尼力,则
分别表示太阳轮和内齿轮与第i个行星轮之间的啮合阻尼力,则
 (4)
(4)
式中, 和
和 分别表示太阳轮和内齿轮与第i个行星轮之间的阻尼系数。
分别表示太阳轮和内齿轮与第i个行星轮之间的阻尼系数。
应用拉格朗日方程,可以推导系统的运动微分方程如下
 (5)
(5)
式中, ——转动惯量;
——转动惯量;
 ——齿轮的实际质量;
——齿轮的实际质量;
 ——当量质量;
——当量质量;
 ——输入、输出转矩;
——输入、输出转矩;
 ——转化到输入、输出端的等价啮合力;
——转化到输入、输出端的等价啮合力;
 ——输入端与太阳轮之间、输出端与行星架之间的扭转刚度;
——输入端与太阳轮之间、输出端与行星架之间的扭转刚度;
 ——
—— 在相应啮合作用线上的当量刚度值;
在相应啮合作用线上的当量刚度值;
 ——太阳轮轴在太阳轮安装处的水平方向、垂直方向支承刚度;
——太阳轮轴在太阳轮安装处的水平方向、垂直方向支承刚度;
 ——太阳轮轴在太阳轮安装处的水平方向、垂直方向阻尼系数;
——太阳轮轴在太阳轮安装处的水平方向、垂直方向阻尼系数;
 ——输入端与太阳轮之间、输出端与行星架之间的阻尼系数;
——输入端与太阳轮之间、输出端与行星架之间的阻尼系数;
 ——
—— 在相应啮合作用线上的当量阻尼系数。
在相应啮合作用线上的当量阻尼系数。
以下将基于动力学模型(5),考查行星轮系内外副齿侧间隙对系统均载特性的影响。
4. 齿轮齿侧间隙对系统均载特性的影响
当计算齿侧间隙值分别为 ,
, 时,数值仿真系统的均载特性曲线如图3所示。
时,数值仿真系统的均载特性曲线如图3所示。
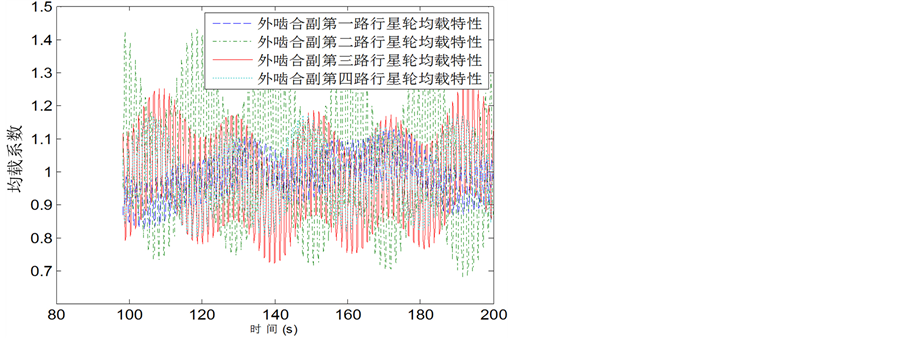
当计算齿侧间隙值分别为 ,
, ,时,数值仿真系统的均载特性曲线如图4所示。
,时,数值仿真系统的均载特性曲线如图4所示。
当计算齿侧间隙值分别为 ,
, 时,数值仿真系统的均载特性曲线如图5所示。
时,数值仿真系统的均载特性曲线如图5所示。
 (a)
(a)
 (b)
(b) (c)
(c)
Figure 3. Dynamic load changes rules when ,
, ; (a) Loading sharing coefficient; (b) Dynamic load of external gear pair; (c) Dynamic load of internal gear pair
; (a) Loading sharing coefficient; (b) Dynamic load of external gear pair; (c) Dynamic load of internal gear pair
图3. 齿侧间隙阶次为10−8 m时啮合副动载荷变化情况;(a) 齿侧间隙阶次为10−8 m时外啮合副均载系数;(b) 齿侧间隙阶次为10−8 m时外啮合副动载荷;(c) 齿侧间隙阶次为10−8 m时内啮合副动载荷
 (a)
(a)
 (b)
(b)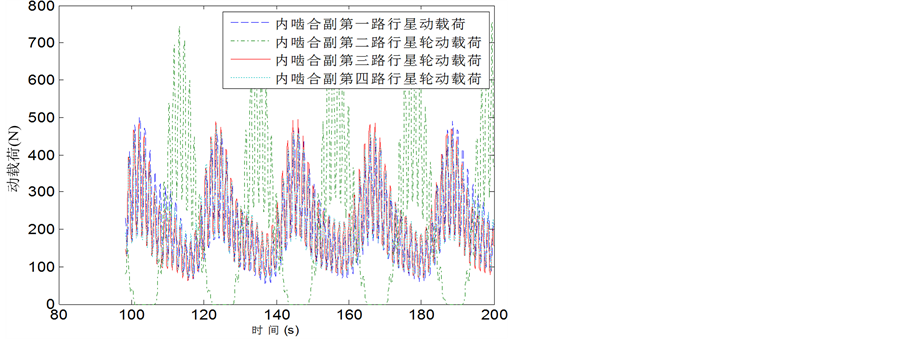 (c)
(c)
Figure 4. Dynamic load changes rules when ,
, ; (a) Loading sharing coefficient; (b) Dynamic load of external gear pair; (c) Dynamic load of internal gear pair
; (a) Loading sharing coefficient; (b) Dynamic load of external gear pair; (c) Dynamic load of internal gear pair
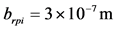
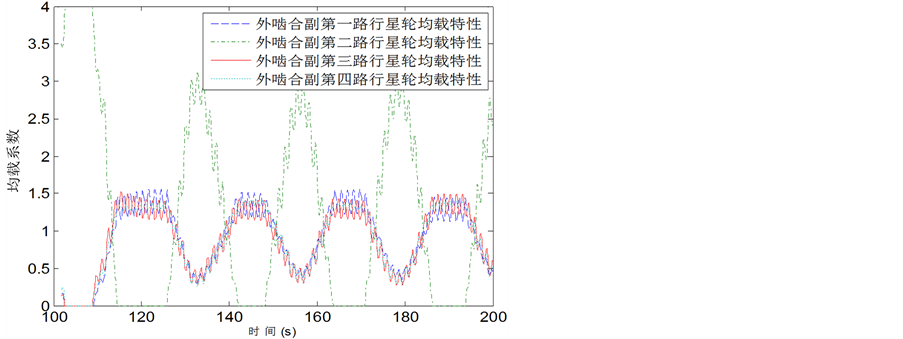
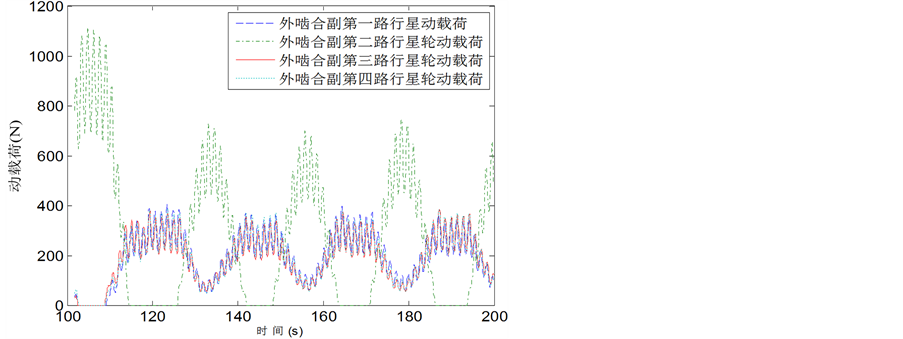
图4. 齿侧间隙阶次为10−7 m时啮合副动载荷变化情况;(a) 齿侧间隙阶次为10−7 m时外啮合副均载系数;(b) 齿侧间隙阶次为×10−7 m时外啮合副动载荷;(c) 齿侧间隙阶次为10−7 m时内啮合副动载荷
 (a)
(a)
 (b)
(b) (c)
(c)
Figure 5. Dynamic load changes rules when ,
, ; (a) Loading sharing coefficient; (b) Dynamic load of external gear pair; (c) Dynamic load of internal gear pair
; (a) Loading sharing coefficient; (b) Dynamic load of external gear pair; (c) Dynamic load of internal gear pair
图5. 齿侧间隙阶次为10−7 m时啮合副动载荷变化情况;(a) 齿侧间隙阶次为10−7 m时外啮合副均载系数;(b) 齿侧间隙阶次为×10−7 m时外啮合副动载荷;(c) 齿侧间隙阶次为10−7 m时内啮合副动载荷
从图3~图5可以归结齿侧间隙对系统动载特性的影响规律:齿侧间隙量纲为10−6 m时,系统第4路外啮合副出现单边冲击现象,齿轮副不能正常啮合,所有4路内啮合副均出现单边冲击现象,其中第4路还出现轻微的双边冲击,均载特性较差;齿侧间隙量纲为10−7 m时,系统各路啮合副的的啮合情况有所好转,仅系统的第4路内外啮合副出现轻微的单边冲击,系统均载特性较10−6 m量纲级大为改善;齿侧间隙量纲为10−8 m时,系统全部8路内外啮合副均能正常啮合,冲击现象完全消失,均载特性也得到根本性的改善。总之可以得到结论:系统齿侧间隙大小会影响各齿轮副的冲击现象进而影响系统的均载特性。在考察参数范围内,相对较小的间隙,可以改善均载特性。
5. 结论
(1) 本文建立了单排4行星轮2K-H型行星齿轮的动力学模型,模型中充分考虑了齿侧间隙等非线性因素。
(2) 通过数值仿真研究了齿侧间隙对行星齿轮传动系统均载性能的影响规律,即齿侧间隙大小会显著影响各齿轮副的冲击现象进而影响系统的均载特性。在考察参数范围内,齿侧间隙越大,行星齿轮传动系统越有可能产生啮合冲击现象,进而弱化系统的均载性能。
基金项目
安徽科技学院自然科学一般项目(ZRC2016488);安徽科技学院质量工程项目(X2016036; Xj201608; X2015055)。
文章引用
孙尚贞,姚爱民,李同杰,马杰,王娟. 齿侧间隙对行星齿轮传动机构均载特性的影响规律研究
Study on the Influence Rules of Bacalash on Dynamic Load Sharing Behavior of a Planetary Gear Train[J]. 机械工程与技术, 2017, 06(02): 217-225. http://dx.doi.org/10.12677/MET.2017.62028
参考文献 (References)
- 1. 叶福民, 朱如鹏, 鲍和云, 等. 非等模数非等压力角行星齿轮系的动力学均载特性[J]. 华南理工大学学报, 2011, 39(1): 117-123.
- 2. 陆俊华, 朱如鹏, 靳广虎. 行星传动动态均载特性分析[J]. 机械工程学报, 2009, 45(5): 85-90.
- 3. Kahramn, A. (1999) Static Load Sharing Characteristics of Transmission Planetary Gear Sets: Model and Experiment. SAE Technical Paper 1999-01-1050, USA.
- 4. 肖铁英, 袁盛治, 陆卫杰. 行星齿轮机构均载系数的计算方法[J]. 东北重型机械学院学报, 1994, 10(4): 290-295.
- 5. 方宗德, 沈允文, 黄镇东. 2K-H行星减速器的动态特性[J]. 西北工业大学学报, 1990, 10(4): 361-371.
- 6. 孙涛, 沈允文. 行星齿轮传动非线性动力学方程求解与动态特性分析[J]. 机械工程学报, 2002, 38(3): 10-15.