Journal of Electrical Engineering
Vol.2 No.03(2014), Article ID:14086,12 pages
DOI:10.12677/JEE.2014.23007
Local Path Planning Based on Improved Artificial Potential Field Using Fuzzy Repulsion Force for Robot
College of Electrical Engineering, Yanshan University, Key Lab of Measurement Technology and Instrumentation of Hebei Province, Qinhuangdao
Email: *wxgtreera@gmail.com, gong0913@163.com, pingx@ysu.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Jul. 7th, 2014; revised: Jul. 14th, 2014; accepted: Jul. 18th, 2014
ABSTRACT
An improved artificial potential field method is proposed to solve the local minimum which exists in the traditional artificial potential field. First, on the basis of improving the attractive field and repulsive field functions of traditional artificial potential field, the problem on goals non-reachable with obstacles nearby (GNRON) is solved by determining the reasonable range of gain of gravitational field and repulsive field. Then, the fuzzy control algorithm is used to calculate the fuzzy repulsion force and the situation when different obstacles are located between the robot and the goal is solved by calculating the virtual force using the fuzzy repulsion force which navigates the robot moving around the obstacle. At last, the proposed approach is verified by MATLAB simulation and indoor experiment, the results of which illustrate that the improved artificial potential field method is effective to solve the local minimal problem.
Keywords:Mobile Robot, Local Path Planning, Artificial Potential Field, Local Minimal Point, Fuzzy Control

引入模糊斥力的改进人工势场法及机器人
局部路径规划
吴晓光*,龚思沛,谢 平
燕山大学电气工程学院,河北省测试计量技术及仪器重点实验室,秦皇岛
Email: *wxgtreera@gmail.com, gong0913@163.com, pingx@ysu.edu.cn
收稿日期:2014年7月7日;修回日期:2014年7月14日;录用日期:2014年7月18日

摘 要
针对传统人工势场法中存在的局部最小问题,提出一种引入模糊斥力的改进人工势场法。该算法首先在改进传统人工势场法的引力场和斥力场函数的基础上,通过确定引力场与斥力场增益的合理取值范围,解决目标位置靠近障碍物造成的目标位置不可达问题(GNRON)。接着利用模糊控制算法计算模糊斥力,并将其引入到改进人工势场法的机器人虚拟合力计算中,使得机器人在目标位置与起始位置间存在不同障碍物时仍能快速完成局部路径规划任务,进一步解决局部最小问题。仿真与室内模拟实验表明,运用该算法能够有效的解决局部最小问题。
关键词
机器人,局部路径规划,人工势场,局部最小,模糊控制

1. 引言
路径规划决定着机器人能否无碰的行进至目标位置,是完成复杂任务的基本保障,是机器人研究的热点问题。根据地图的认知程度,路径规划一般可分为基于已知地图的全局路径规划和基于环境感知的局部路径规划[1] 。机器人实际工作环境中通常存在着未知障碍物,全局路径规划需要预知所有障碍物信息,不适用于存在未知障碍物的环境,因而采用局部路径规划方法引导机器人行进。局部路径规划有模糊控制[2] 、快速扩展随机树算法[3] 和人工势场法[4] 等。诸多局部路径规划方法中,模糊控制缺少如人工势场法所拥有的目标信息,使得引导机器人移动至目标位置的局部路径规划需要额外建立约束;人工势场法无需采用类似于遗传算法[5] [6] 、快速扩展随机树等算法中的随机搜索方式,计算速度稳定快捷。因此,本文对采用人工势场法的局部路径规划进行研究。
由于人工势场函数结构简单、计算快捷且具有良好的实时性等特点,使得人工势场法广泛应用于机器人局部路径规划中。然而传统人工势场法存在局部最小问题、邻近障碍物间无法发现路径和易发生震荡性摇摆等局限[6] 。为改善上述局限,卢恩超等人对斥力场函数进行了修改,并结合边缘探测原理,使其能够运用于拥有大型障碍物的路径规划[7] ,然而该方法的实现是建立在拥有诸如激光测距仪等较为昂贵的传感器基础上,不适用于会展及家庭辅助机器人上;孟蕊等人在斥力场函数中引入速度矢量,并与模糊控制相结合[8] ,成功将该方法应用于拥有动态障碍物的路径规划,然而动态障碍物的速度矢量的获取难以满足现实环境下的快速实时要求,不适用于机器人和动态障碍物移动较快的场合;Hossein等人在自行构建的人工势场中引用用于划分区域的势能阈值,实现起始位置和目标位置附近势能高于阈值的区域的联通,并将联通域中势能变化最快的曲线视为所寻找的路径[9] ,然而该方法仅适合地图完全已知的路径规划,并不适于地图完全或部分未知的局部路径规划。因此,为解决人工势场法中的局部最小问题,提出一种适用于大型仓库、厂房等场合,且易于下位机实现的局部路径规划方法。
本文首先针对局部最小问题中目标位置附近存在障碍物造成的GNRON问题[10] -[12] ,在传统人工势场函数的基础上,改进势场函数中目标距离和障碍物距离的作用形式,并将目标距离引入斥力场函数。在此基础上,为消除路径规划时机器人工作空间中存在的GNRON问题,对机器人进行虚拟受力分析,获得改进势场函数中引力场和斥力场增益的合理取值范围。为进一步解决障碍物不同位置引起的局部最小问题,在机器人虚拟合力的计算中引入模糊斥力,从而使得存在局部最小问题的环境中,机器人依然能够完成局部路径规划任务。最后在不同障碍物设置环境中的局部路径规划仿真与室内模拟实验表明,该算法能够有效的解决局部最小问题。
2. 改进人工势场法
人工势场法的基本思想是在机器人工作空间中,人为构建一个作用于机器人的虚拟力场。在该力场中,机器人距离目标位置越远,机器人所在位置的引力势越大;机器人距离障碍物越近,机器人所在位置的斥力势越大。工作空间中某位置的势能为该位置引力势与斥力势的叠加,机器人沿着势场的负梯度的方向寻找路径。
2.1. 传统人工势场势函数描述
传统人工势场法势函数如式(1)~(4)。
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
式(1)、(2)分别为人工势场的引力场函数 和斥力场函数
和斥力场函数 ,人工势场势函数
,人工势场势函数 为引力场函数
为引力场函数 和斥力场函数
和斥力场函数 的代数和,如式(3)所示。其中正实数
的代数和,如式(3)所示。其中正实数 和
和 分别为引力场增益与斥力场增益,
分别为引力场增益与斥力场增益, 为机器人与目标位置之间的距离,
为机器人与目标位置之间的距离, 为机器人与其最近的障碍物距离,
为机器人与其最近的障碍物距离, 为人为设定的障碍物安全界限距离。当
为人为设定的障碍物安全界限距离。当 时,机器人处在斥力场范围内,受到障碍物斥力影响;当
时,机器人处在斥力场范围内,受到障碍物斥力影响;当 时,机器人处在安全范围,不受障碍物斥力影响。机器人在工作空间中任一点所受虚拟合力
时,机器人处在安全范围,不受障碍物斥力影响。机器人在工作空间中任一点所受虚拟合力 为人工势场势函数在该点的负梯度,如式(4)所示。由式(3)、(4)可知,
为人工势场势函数在该点的负梯度,如式(4)所示。由式(3)、(4)可知, 随着目标距离的减小而减小,而
随着目标距离的减小而减小,而 随着障碍物距离的减小而迅速增大。当目标位置靠近障碍物和障碍物位于机器人与目标位置之间时,机器人将因引力与斥力共线相抵陷入工作空间中的局部最小值点,产生局部最小问题,使得机器人无法到达目标位置。
随着障碍物距离的减小而迅速增大。当目标位置靠近障碍物和障碍物位于机器人与目标位置之间时,机器人将因引力与斥力共线相抵陷入工作空间中的局部最小值点,产生局部最小问题,使得机器人无法到达目标位置。
2.2. 改进人工势场势函数描述
鉴于根据距离信息构建的人工势场函数能够找到柔顺合理的路径,并为解决因机器人所受引力与斥力共线相抵产生的局部最小问题,首先针对目标位置靠近障碍物所引起的GNRON问题改进传统人工势场势函数。对势场函数进行改进时,考虑到机器人处于未知环境中,难以获取障碍物精确的位置、形状及分布信息,因此仅根据最近障碍物计算虚拟斥力。将传统引力场函数式(1)中的 改为一次形式,使得
改为一次形式,使得
引力场变化趋势更加平滑,如式(5)所示;其次,如式(6)中所示,将传统斥力场函数式(2)中 修
修
改为 ,以加快运算速度,提高局部路径规划的实时性;最后,将目标距离
,以加快运算速度,提高局部路径规划的实时性;最后,将目标距离 引入斥力场函数中,消除因目标位置靠近障碍物产生的虚拟斥力过大而导致目标位置不可达,如式(6)所示。改进后人工势场势函数的引力场函数
引入斥力场函数中,消除因目标位置靠近障碍物产生的虚拟斥力过大而导致目标位置不可达,如式(6)所示。改进后人工势场势函数的引力场函数 与斥力场函数
与斥力场函数 如下:
如下:
 (5)
(5)
 (6)
(6)
将式(5)、(6)代入式(3)、(4)计算改进人工势场势函数 以及和机器人受力函数
以及和机器人受力函数 。
。
2.2.1. 机器人定性受力分析
为确定改进势场函数中引力场增益 与斥力场增益
与斥力场增益 的合理取值范围,对机器人进行虚拟受力分析。仅需考虑最近障碍物产生的虚拟斥力,可分为两种情况。
的合理取值范围,对机器人进行虚拟受力分析。仅需考虑最近障碍物产生的虚拟斥力,可分为两种情况。
1) 障碍物、机器人和目标位置不共线 如图1所示,虚拟引力与斥力的方向不共线,虚拟合力不为零,此情况下机器人工作空间中不存在局部最小问题。
2) 障碍物、机器人和目标位置共线 机器人虚拟受力分析可简化至一维环境。针对本文所涉及的GNRON问题,仅需考虑目标位置与机器人位于障碍物同侧的两种情形。
a. 如图2所示,机器人位于障碍物和目标位置之间,虚拟引力与斥力的方向一致,虚拟合力不为零,不存在局部最小问题。
b. 如图3所示,目标位置位于障碍物和机器人之间时,虚拟引力与斥力方向相反,存在出现局部最
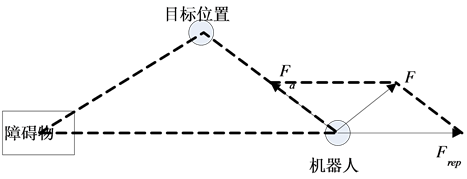
Figure 1. The force schematic view of the robot between the obstacle and the target non-collinear
图1. 障碍物、机器人及目标位置非共线受力示意图

Figure 2. The force schematic view of the robot between the obstacle and the target collinear
图2. 机器人处于目标位置与障碍物间的共线受力示意图

Figure 3. The robot’s force schematic view of the target between the robot and the obstacle collinear
图3. 目标位置处于机器人与障碍物之间的共线受力示意图
小问题的可能性,需针对该情形进一步分析改进人工势场势函数,以获得引力场与斥力场增益的合理取值范围。
2.2.2. 引力场与斥力场增益的取值范围
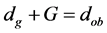
针对图3存在的GNRON问题,对改进人工势场势函数进行分析,确定引力场增益 与斥力场增益
与斥力场增益 的合理取值范围。图4为图3中距离常变量关系的细节示意图。
的合理取值范围。图4为图3中距离常变量关系的细节示意图。 为目标位置与安全界限之间的距离,
为目标位置与安全界限之间的距离, 为目标位置与障碍物之间的距离。
为目标位置与障碍物之间的距离。
为保证安全界限与目标位置之间不存在局部最小点,改进后的人工势场势函数需要满足以下两个条件。
1) 安全界限位置以外的最小势能值应大于安全界限位置与目标位置之间任一位置的势能值。根据该条件,由式(3)、(5)、(6)可推出:
 (7)
(7)
由图4可知 和
和 满足:
满足:
 (8)
(8)
联立式(7)、(8)可得:
 (9)
(9)
2) 改进人工势场势函数 在安全位置与目标位置之间的区域内为关于
在安全位置与目标位置之间的区域内为关于 的单调递增函数。由图4可得关系式:
的单调递增函数。由图4可得关系式:
 (10)
(10)
 (11)
(11)
根据式(10)、(11),式(3)可表示为
 (12)
(12)
对式(12)求一阶导数得:
 (13)
(13)
为确保 为关于
为关于 的单调递增函数,须满足
的单调递增函数,须满足 始终为正。
始终为正。 的形式为关于
的形式为关于 二次函数,且
二次函数,且 ,因此,为保证
,因此,为保证 与x轴无交点,需满足:
与x轴无交点,需满足:
 (14)
(14)
Figure 4. Schematic view of distance relationship
图4. 距离关系示意图
由式(14)可以推出,满足条件2时,引力场增益 和斥力场增益
和斥力场增益 比值关系为:
比值关系为:
 (15)
(15)
由式(9)、(15)结果可得, 和
和 比值关系满足式(15)时,图3情形不存在局部最小问题。针对机器人的二维工作环境,令距离机器人最近的障碍物坐标为
比值关系满足式(15)时,图3情形不存在局部最小问题。针对机器人的二维工作环境,令距离机器人最近的障碍物坐标为 、目标位置坐标为
、目标位置坐标为 、机器人位置坐标为
、机器人位置坐标为 。
。 和
和 可表示为:
可表示为:
 (16)
(16)
 (17)
(17)
根据式(3)、(6),机器人所受虚拟合力为:
 (18)
(18)
当机器人处于安全范围界限以外,不受障碍物斥力影响时,根据式(5)、(18)得机器人所受虚拟合力的横纵分量
 (19)
(19)
 (20)
(20)
当机器人处于安全范围界限以内,受到障碍物斥力影响时,根据式(3)、(5)、(6)、(18)得机器人所受虚拟合力横纵分量
 (23)
(23)
 (24)
(24)
局部路径规划过程中,机器人实时根据虚拟受力与模糊斥力计算虚拟合力,以确定下一时刻的偏转角度及行进距离。
3. 改进人工势场法中的模糊斥力引入
由于上述改进仅针对GNRON问题,并未涉及机器人与目标位置之间存在障碍物的情况,因此工作空间中依然可能存在局部最小问题,如图5所示。模糊逻辑是模拟人类大脑的模糊思维建立的,拥有适应性强、易调节、较强容错性等特点[13] ,因此根据机器人的绕障原理建立模糊斥力的模糊逻辑规则,将模糊控制与改进的人工势场法相结合,进一步解决局部最小问题。
图6为引入模糊斥力的改进人工势场法中虚拟合力计算框图。模糊逻辑控制器的输入为最近障碍物侧向距离分量,输出为采用质心法解模糊后的模糊斥力大小和模糊斥力偏转角度。如图7所示,最近障碍物侧向距离分量为障碍物距离在垂直于机器人当前航向的分量。引入模糊斥力的虚拟受力如图8所示,机器人当前航向与模糊斥力偏转角度θ叠加得到模糊斥力方向,由模糊斥力角度和模糊斥力大小得到模糊斥力,虚拟合力为模糊斥力、虚拟斥力和虚拟引力的矢量和。图9为模糊斥力偏转角度、模糊斥力大

Figure 5. The robot’s force schematic view of the obstacle between the robot and the target collinear
图5. 障碍物处于机器人与目标之间的共线受力示意图
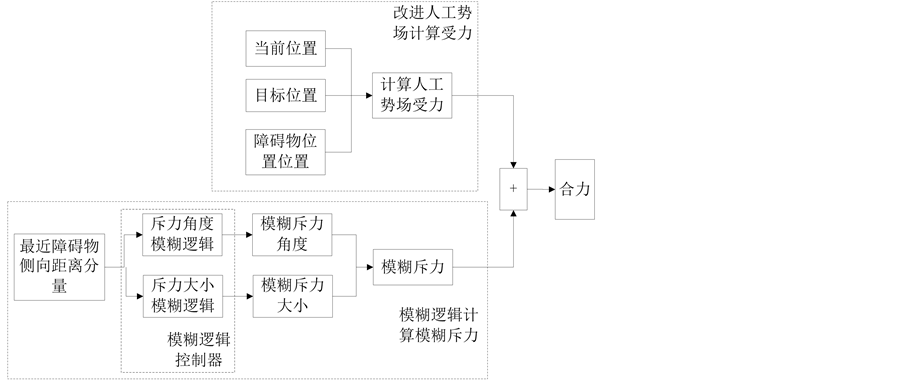
Figure 6. Artificial potential field repulsion force algorithm diagram after introducing fuzzy repulsion force
图6. 引入模糊斥力后的人工势场受力算法框图

Figure 7. The view of nearest obstacle lateral distance component
图7. 最近障碍物侧向距离分量示意图

Figure 8. Virtual force view introduced fuzzy repulsion
图8. 引入模糊斥力的虚拟受力示意图
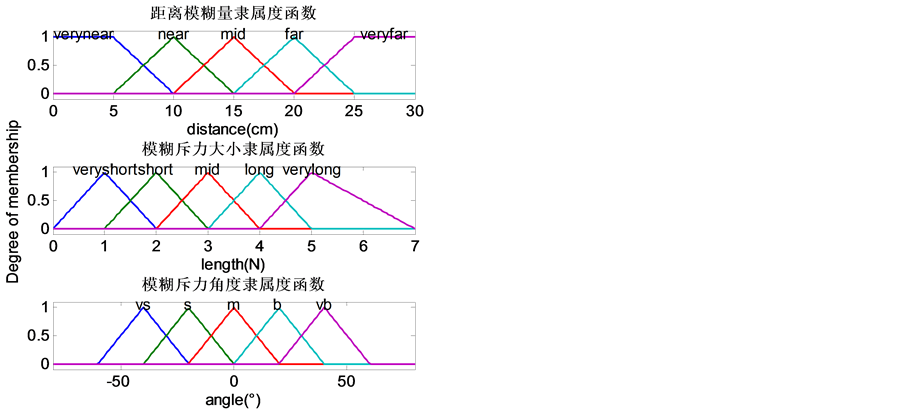
Figure 9. The fuzzy controller membership of the input and output
图9. 模糊控制器输入与输出隶属度函数
小和最近障碍物侧向距离分量的隶属度。
计算模糊斥力过程中,模糊斥力偏转角度以靠近障碍物的方向为正,反之为负,偏转方向由左右最近障碍物相对于机器人的方位确定。若机器人正前方出现障碍物时,为使得机器人能够快速避障,模糊斥力偏转角度将人为在模糊控制器输出结果上增加一个定值,根据本文实验场景该值取50˚,在不同复杂环境中该值需要通过仿真调试得到。若机器人两侧的最短障碍物距离相等时,模糊斥力偏转角度为零。若同时存在上述两种情况,机器人默认向左偏转。
最近障碍物侧向距离分量与模糊斥力角度之间的模糊规则如下:
1) If (distance is verynear) then (angle is vb)
2) If (distance is near) then (angle is b)
3) If (distance is mid) then (angle is m)
4) If (distance is far) then (angle is s)
5) If (distance is veryfar) then (angle is vs)
最近障碍物侧向距离分量与模糊斥力大小之间的模糊规则如下:
1) If (distance is veryfar) then (length is verylong)
2) If (distance is far) then (length is long)
3) If (distance is mid) then (length is mid)
4) If (distance is near) then (length is short)
5) If (distance is verynear) then (length is veryshort)
进一步,为避免因引入模糊斥力而导致改进人工势场法失效,在计算机器人虚拟合力时,对模糊斥力进行如下限定:
1) 当 时,虚拟合力中不计算模糊斥力;
时,虚拟合力中不计算模糊斥力;
2) 当机器人前方出现障碍物,且 时,最终虚拟合力开始计算模糊斥力。
时,最终虚拟合力开始计算模糊斥力。
4. 实验验证
上述方法是针对局部最小问题分步进行的改进,因此通过仿真实验分别对上述方法各阶段进行验证。最后,对引入模糊斥力的改进人工势场法进行室内模拟局部路径规划实验。
4.1. 改进人工势场势函数解决GNRON问题仿真实验
采用MATLAB仿真软件对运用改进人工势场法的局部路径规划进行仿真实验。为简化计算将机器人视为质点,仿真实验中均对障碍物做延伸处理,延伸距离为机器人最大尺寸的一半。在二维环境中设置单个障碍物,将目标位置置于障碍物与机器人之间。实验中,延伸处理后的障碍物尺寸为76
cm × 52 cm, 、
、 ,由式(11)得
,由式(11)得 ,根据式(15)结论,引力场与斥力场的增益比大于等于75即可解决GNRON问题,本次仿真实验取
,根据式(15)结论,引力场与斥力场的增益比大于等于75即可解决GNRON问题,本次仿真实验取 ,
, 。仿真实验中采用文献[14]
的固定步长设置方法,本文步长设为0.1 cm。图10为在存在GNRON问题时,仅运用改进人工势场势函数的路径规划曲线。如图10a中所示,机器人进入安全界限范围后,因受到虚拟斥力的作用而改变行进方向。图10b所示,当机器人靠近目标位置时,所受虚拟斥力随着目标距离的减小而减小,虚拟引力引导机器人移动至目标位置。
。仿真实验中采用文献[14]
的固定步长设置方法,本文步长设为0.1 cm。图10为在存在GNRON问题时,仅运用改进人工势场势函数的路径规划曲线。如图10a中所示,机器人进入安全界限范围后,因受到虚拟斥力的作用而改变行进方向。图10b所示,当机器人靠近目标位置时,所受虚拟斥力随着目标距离的减小而减小,虚拟引力引导机器人移动至目标位置。
本文所提出的改进人工势场势函数仅针对GNRON问题,未涉及障碍物位于目标位置与机器人之间的情形,因此依然可能因存在局部最小问题而导致目标位置不可达。如图11所示,由于机器人所受虚拟
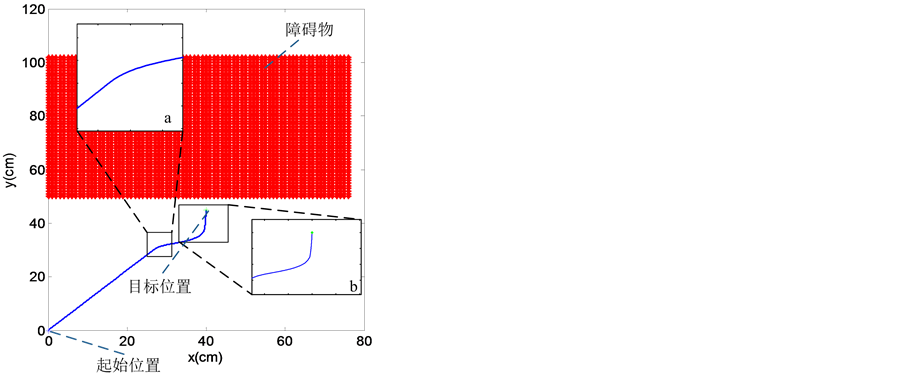
Figure 10. The path planned in one-obstacle environment with GNRON
图10. 单个障碍物环境的局部路径规划曲线图
引力与斥力共线相抵,导致机器人陷入局部最小点。
4.2. 引入模糊斥力的改进人工势场仿真实验
图12为单个障碍物的环境中,结合模糊控制与人工势场法的局部路径规划曲线。障碍物、目标位置与起始位置分布如图12所示,设置 ,
, 、
、 取值不变。图12A为机器人绕过简单障碍物的路径规划曲线。为进一步验证引入模糊斥力的改进人工势场法能够适应更为苛刻的障碍物环境,在机器人工作空间中设置环形障碍物,图12B为机器人在环形障碍物环境中的路径规划曲线。图12B-a中,机器人正前方障碍物距离小于安全界限距离,且机器人左右障碍物距离相等,机器人在模糊斥力的引导下向左转向;如图12B-b所示,在模糊斥力引导机器人绕障过程中,机器人在模糊斥力的作用下实时调整行进航向。图13为机器人在多个障碍物环境中的局部路径规划仿真曲线。图13a中,机器人进入安全界限范围,受到虚拟斥力和模糊斥力的共同排斥作用,机器人改变行进方向避开障碍物。图13b中,机器人正前方出现障碍物时,由于受到模糊斥力的作用,行进方向发生了较大偏转。图13c为机器人与障碍物保持一定距离的绕障过程,模糊斥力实时调整机器人姿态,从而出现了小幅震荡现象。
取值不变。图12A为机器人绕过简单障碍物的路径规划曲线。为进一步验证引入模糊斥力的改进人工势场法能够适应更为苛刻的障碍物环境,在机器人工作空间中设置环形障碍物,图12B为机器人在环形障碍物环境中的路径规划曲线。图12B-a中,机器人正前方障碍物距离小于安全界限距离,且机器人左右障碍物距离相等,机器人在模糊斥力的引导下向左转向;如图12B-b所示,在模糊斥力引导机器人绕障过程中,机器人在模糊斥力的作用下实时调整行进航向。图13为机器人在多个障碍物环境中的局部路径规划仿真曲线。图13a中,机器人进入安全界限范围,受到虚拟斥力和模糊斥力的共同排斥作用,机器人改变行进方向避开障碍物。图13b中,机器人正前方出现障碍物时,由于受到模糊斥力的作用,行进方向发生了较大偏转。图13c为机器人与障碍物保持一定距离的绕障过程,模糊斥力实时调整机器人姿态,从而出现了小幅震荡现象。

Figure 11. The path planned in the environment that an obstacle between mobile robot and target
图11. 障碍物位于目标位置与机器人之间的路径规划曲线图
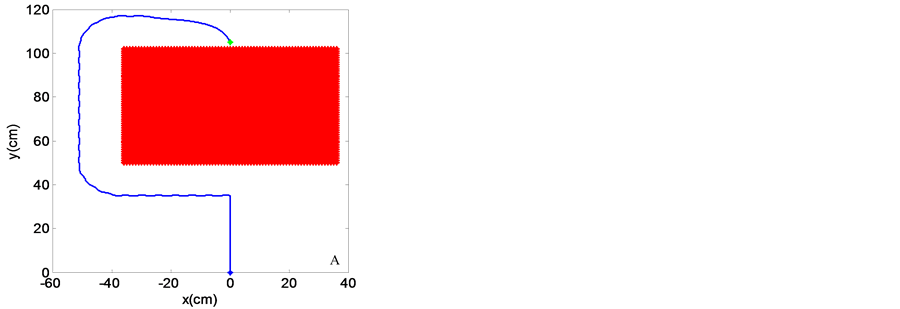
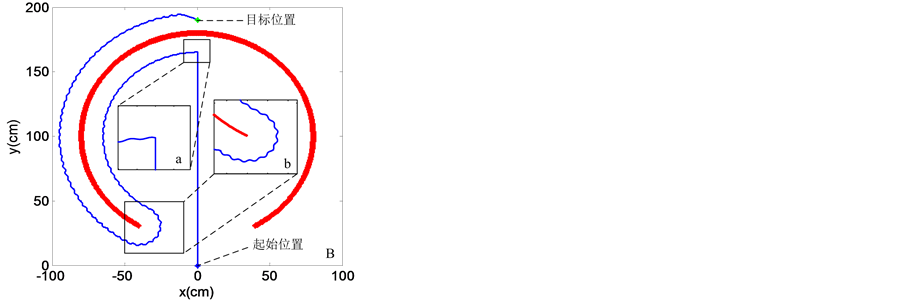
Figure 12. The path planned by artificial potential field using fuzzy repulsion
图12. 引入模糊斥力的人工势场局部路径规划曲线图
4.3. 室内环境避障模拟试验
为进一步验证引入模糊斥力的改进人工势场法的有效性,利用实验室自行搭建的履带式移动机器人和超声定位系统进行室内模拟实验。如图14所示,履带式移动机器人尺寸为22 cm × 11 cm × 19 cm其配备可单独控制左右履带转速的电机驱动模块、获取障碍物距离的超声波测距模块、获取机器人姿态角度的电子罗盘和与超声定位系统通信的无线通信模块;移动机器人还配备多个超声发射探头以实现系统的准确定位。图15为超声定位系统,超声接收探头等间距共线放置,超声接收电路将超声接收探头收到的
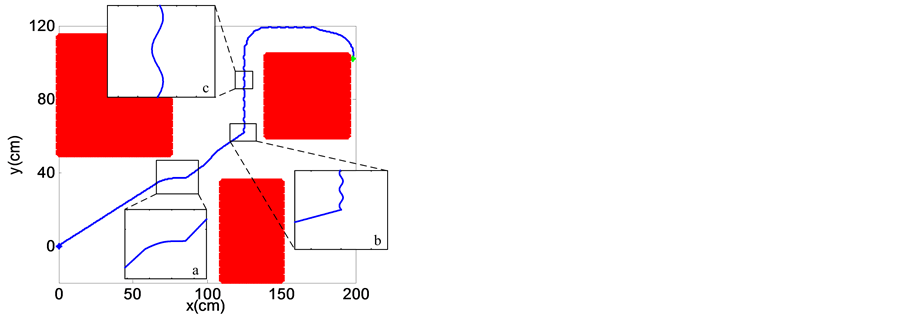
Figure 13. The path planned in three-obstacles environment
图13. 三个障碍物环境的局部路径规划曲线图

Figure 14. Mobile robot
图14. 移动机器人
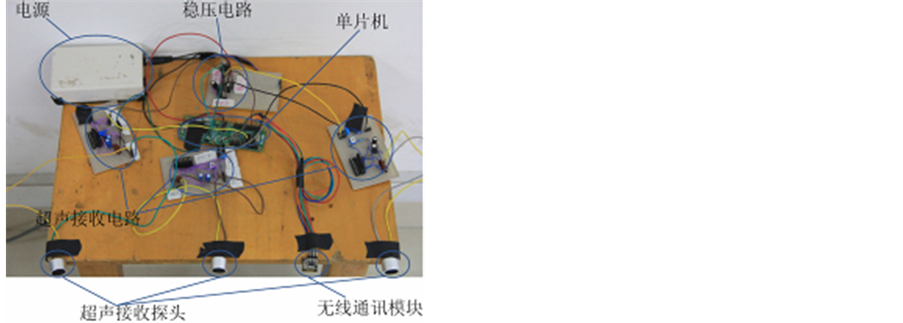
Figure 15. Ultrasonic positioning system
图15. 超声定位系统
信号转换为中断信号,单片机通过定时器计算三个中断信号间的时间差,以此计算机器人所在位置坐标。为进一步提升移动机器人定位精度,在实验场景四周放置四个超声定位系统,如图16所示。
室内模拟实验中障碍物设置参考图13仿真实验,如图16所示。图17为室内模拟实验视频截图,由图17a与图17b可知移动机器人从起始位置出发,由于最近障碍物距离较大,机器人未受到虚拟斥力与模糊斥力的作用,在虚拟引力作用下径直驶向目标位置。图17c与图17d分别为移动机器人左右两侧出现障碍物,且前方障碍物较远,移动机器人在虚拟斥力作用下做出避障动作。由图17e与图17f可知当移动机器人正前方出现障碍物时,移动机器人在虚拟斥力与模糊斥力共同作用下,航向偏转较大,并开始以绕障的方式进行避障。由图17g与图17h可知移动机器人在模糊斥力的作用下绕过障碍物并行驶至目标位置,其路径与仿真结果基本一致,验证了本文所述方法在实际环境应用中的实时性、有效性。

Figure 16. Obstacles set in the indoor simulation experiment
图16. 模拟实验障碍物设置

Figure 17. Indoor simulation experiment
图17. 室内模拟实验
5. 结束语
人工势场法由于其函数结构简单、计算快捷且具有良好的实时性等特点,使其在局部路径规划中得到广泛应用。本文在分析传统人工势场法所存在的局部最小问题基础上,提出了一种引入模糊斥力的改进人工势场法。首先针对目标位置附近存在障碍物的简单环境,对引力场与斥力场增益进行合理限定,消除了造成局部最小的虚拟引力与斥力共线相抵问题;针对存在复杂障碍物的未知现实环境,引入模糊斥力使得机器人适应更为苛刻的环形障碍物环境。仿真与室内模拟实验表明,该算法能够适应多种复杂障碍物环境。因此,可将其应用于系统构建成本低廉、运行环境复杂、易于下位机实现的机器人路径规划现实应用。减小或消除规划路径规划过程中的振荡现象是下一步的研究重点。
基金项目
河北省自然科学基金(NO. F2014203246)、河北省高等学校自然科学研究青年基金项目(NO. QN2014 074)、秦皇岛市科学技术研究与发展计划(NO. 2012021A040)、燕山大学博士基金(NO. B805)、燕山大学青年教师自主研究计划课题(NO. 13LGB009)。
参考文献 (References)
- [1] 林凯 (2010) 未知环境下移动机器人路径规划. 硕士学位论文,湖南师范大学, 长沙.
- [2] Qin, Z., Bai, M. and Ralescu, D. (2011) A fuzzy control system with application to production planning problems. Information Sciences, 181, 1018-1027.
- [3] 康亮, 赵春霞, 郭剑辉, 等 (2009) 未知环境下改进的基于RRT算法的移动机器人路径规划. 模式识别与人工智能, 3, 337-343.
- [4] 吴晨光 (2012) 基于改进人工势场法的机器人路径规划及其在RoboCup中的应用. 硕士学位论文, 南京邮电大学, 南京.
- [5] 孙俊 (2009) 移动机器人路径规划. 硕士学位论文, 杭州电子科技大学, 杭州.
- [6] 李庆中, 顾伟康, 叶秀清, 等 (2002) 基于遗传算法的移动机器人动态避障路径规划方法. 模式识别与人工智能, 2, 161-166.
- [7] 卢恩超, 张邓斓, 宁雅男, 等 (2012) 改进人工势场法的机器人路径规划. 西北大学学报(自然科学版), 5, 735- 738.
- [8] 孟蕊,苏维均,连晓峰, 等 (2010) 基于动态模糊人工势场法的移动机器人路径规划. 计算机工程与设计, 7, 1558- 1561.
- [9] Adeli, H., Tabrizi, M.H.N., Mazloomian, A., et al. (2011) Path planning for mobile robots using iterative artificial potential field method. International Journal of Computer Science Issues, 8, 28-32.
- [10] Jia, Q. and Wang, X. (2010) An improved potential field method for path planning. IEEE Control and Decision Conference (CCDC), 2265-2270.
- [11] Jia, Q. and Wang, X. (2009) Path planning for mobile robots based on a modified potential model. IEEE International Conference on Mechatronics and Automation, 4946-4951.
- [12] Zhang, J.Y. and Liu, T. (2007) Optimized path planning of mobile robot based on artificial potential field. Acta Aeronautica et Astronautica Sinica, 28, 183-188.
- [13] 王志娟 (2008) 模糊控制中高级算法的设计和研究. 硕士学位论文, 山东大学, 济南.

NOTES
*通讯作者。