Optoelectronics
Vol.06 No.04(2016), Article ID:19354,10
pages
10.12677/OE.2016.64020
The Comparison of Wavelength Dependence Models for 1.5 μm Visibility Lidar
Jingyu Ren1, Xiang Shang2*, Mingjia Shangguan2, Chong Wang2, Jiawei Qiu2, Haiyun Xia2
1Tsinghua University High School, Beijing
2School of Earth and Space Science, University of Science and Technology of China, Hefei Anhui

Received: Dec. 4th, 2016; accepted: Dec. 19th, 2016; published: Dec. 26th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Visibility has a great effect on air pollution monitoring and all kinds of traffic operations. 1.5 μm visibility lidar has many advantages, such as eye-safe, miniaturization and modularity. Therefore 1.5 μm visibility lidar is suitable for crowded places. Visibility is defined as the atmospheric distance of transmission when 550 nm collimated laser’s output power attenuates to 2% or 5%. Thus, when using 1.5 μm visibility lidar, the wavelength correction must be done. Several models have been summarized in this work, and the differences of these models have been analyzed. To have a comparison of these models, a 1.5 μm visibility lidar has been constructed. And a 24-hour continuous visibility observation is carried out in Hefei, Anhui Province in October, 2014. By comparing the data of lidar with the forward visibility meter, the Kim model is confirmed as the most suitable model for visibility measurement in Hefei and the average relative error is less than 7.8%.
Keywords:Visibility, 1.5 μm, Lidar, Wavelength Dependence Model

1.5 μm能见度激光雷达的波长修正模型比较
任敬宇1,尚祥2*,上官明佳2,王冲2,裘家伟2,夏海云2
1清华大学附属中学,北京
2中国科学技术大学地球与空间科学学院,安徽 合肥

收稿日期:2016年12月4日;录用日期:2016年12月19日;发布日期:2016年12月26日

摘 要
大气能见度在大气污染监测和保障航空、航海及陆上交通安全等方面具有重要作用。1.5 μm能见度激光雷达具有人眼允许最大曝光功率大,易于实现眼安全,可实现小型化和模块化等优点,适用于人员密集的场所。大气能见度定义为当550 nm准直激光经大气衰减到出射功率的2%或5%时所传输的大气距离,因此当采用1.5 μm激光时,需要进行波长修正。本文总结了现有的几种波长修正模型,并对它们之间的差异进行了分析。为了比较各种模型,研制了1.5 μm能见度激光雷达,并在2014年10月份于安徽合肥进行了连续24小时的能见度观测。通过与前向散射能见度仪进行比较,确认Kim模型与合肥实际情况最为吻合,平均相对误差小于7.8%。
关键词 :能见度,1.5 μm,激光雷达,波长修正模型

1. 引言
大气能见度是表征大气透明度的物理量,其对交通运输、大气光学特性研究、环境污染监测等领域有着重要的影响。随着社会的不断发展,各类交通运输工具速度的不断提高,以及城镇居民对环境问题关注度的上升,准确测量能见度数值也愈发重要 [1] 。
能见度测量仪可以分为两种:透射式能见度仪和散射式能见度仪 [2] 。随着激光雷达技术的不断发展,激光雷达在不同领域的应用也逐渐引起人们的重视 [3] [4] [5] 。能见度激光雷达通过接收大气后向散射信号,消光系数和能见度关系。由于能见度激光雷达具有高时空分辨率,探测距离远,不仅可测量水平能见度,还可以测量斜程能见度,如今已成为各科研团队争相研制的目标 [6] 。根据Koschmieder的理论,能见度被定义为仅与大气消光系数和人眼对比度阈值相关 [7] ,因此在特定人眼对比度阈值时,能见度可以由大气消光系数反演得到。目前反演大气消光系数主要有三种方法:斜率法、Klett反演法 [8] 和Fernald反演法 [9] 。通过假定大气后向散射系数和消光系数不随距离变化,斜率法在大气较为均匀或是水平探测的情况下能够给出较为准确的结果;但在大气不均匀或是倾斜探测的情况下,由于大气后向散射系数和消光系数随距离变化,需要采用Klett反演法或是Fernald反演法。
虽然严格意义上能见度激光雷达应当使用550 nm激光进行探测,但是在实际研制能见度激光雷达时,综合考虑大气透射窗口、激光器和探测器性价比等条件,现有能见度激光雷达工作波长通常使用Nd:YAG激光器的二倍频即532 nm [10] 。1.5 μm激光相比于532 nm激光有着许多优势:1) 在紫外到近红外波段(0.3 μm~10 μm),1.5 μm激光的人眼允许最大曝光功率最大,最易实现人眼安全;2) 由于光通讯领域的发展,配套的1.5 μm波段光纤通信器件越发成熟,易于实现仪器的集成化、小型化;3) 1.5 μm波段位于大气透射窗口,大气衰减较少 [11] [12] 。
但是由于1.5 μm与550 nm偏差很大,反演出的能见度也有很大差异,必须对1.5 μm激光的测量结果进行波长修正。现有的模型中,最早提出的是Kruse模型 [13] ,一直到2000年左右都是应用最广的波长修正模型。但自2001年以后,随着观测数据的累积,Kruse模型被发现在低能见度时误差较大,许多课题组对Kruse模型进行了修正。其中,Kim等人提出在能见度低于0.5 km,波长为0.55至1.55 μm时,能见度与波长不相关 [14] 。Naboulsi等人在平流雾和对流雾的情况下(能见度在0.05 km至1 km时),当波长从0.69 μm到1.55 μm时,利用实验数据拟合出了波长修正模型 [15] 。Grabner于2011年,基于米散射原理,推导了在雾和霾条件下,消光系数的波长依赖关系 [16] 。然而上述模型之间存在较大差异:Kruse模型认为,对于任意能见度,消光系数随着波长增加而递减;Kim模型认为当能见度小于0.5 km时,消光系数不随波长变化;Naboulsi模型则认为消光系数随着波长的增加而增加。
本文首先总结了激光雷达中消光系数的计算方法,然后介绍了现有的几种波长修正模型的具体形式。为了验证几种模型之间的差异,利用研制的1.5 μm能见度激光雷达在合肥地区进行了连续24小时的探测,利用实测结果分析了三种波长修正模型应用于合肥地区时的误差。
2. 能见度测量原理
能见度,是反映大气透明度的一个指标,航空界定义为具有正常视力的人在当时的天气条件下还能够看清楚目标轮廓的最大距离。定量化的大气能见度被定义为当550 nm准直激光经大气衰减到出射功率的2%或5%时所传输的大气距离。
在水平大气消光均匀前提下,从辐射度量学可以推出水平能见度与大气消光系数之间的关系为 [17] :
 (1)
(1)
式中, 为水平能见度,
为水平能见度, 为波长
为波长 激光在水平方向平均大气消光系数。波长
激光在水平方向平均大气消光系数。波长 一般取为550 nm;人眼对比度阈值分为0.02 (通常光学视距)和0.05 (气象光学视距),为了避免混淆特别指出本文所述的大气能见度是值人眼对比度阈值为0.02时的能见度。由式(1)可知通过测量大气消光系数
一般取为550 nm;人眼对比度阈值分为0.02 (通常光学视距)和0.05 (气象光学视距),为了避免混淆特别指出本文所述的大气能见度是值人眼对比度阈值为0.02时的能见度。由式(1)可知通过测量大气消光系数 能够反演能见度
能够反演能见度 。
。
由激光雷达方程,脉冲激光雷达接收到探测距离 处的后向散射信号功率为:
处的后向散射信号功率为:
 (2)
(2)
式中, 是
是 处回波信号功率,
处回波信号功率, 出射功率,c是光速,
出射功率,c是光速, 是脉宽,
是脉宽, 是望远镜面积,
是望远镜面积, 为几何重叠因子,
为几何重叠因子, 为大气后向散射系数,
为大气后向散射系数, 为大气消光系数。其中几何重叠因子可以通过仪器校准获得,而
为大气消光系数。其中几何重叠因子可以通过仪器校准获得,而 和
和 都是距离的函数,仅由式(2)是无法求解这两个未知数的。所以为了获得大气消光系数,必须添加一定的假设才能进行反演。主要的反演方法有以下三种:
都是距离的函数,仅由式(2)是无法求解这两个未知数的。所以为了获得大气消光系数,必须添加一定的假设才能进行反演。主要的反演方法有以下三种:
2.1. 斜率法
为了简化推导过程,定义距离修正功率 :
:
 (3)
(3)
则式(2)可化为:
 (4)
(4)
式中, 是距离
是距离 处的距离修正功率。假设大气粒子分布均匀(即后向散射系数不随距离改变),将式(4)两边对距离求导可得:
处的距离修正功率。假设大气粒子分布均匀(即后向散射系数不随距离改变),将式(4)两边对距离求导可得:
 (5)
(5)
根据式(5)可知,只要探测到激光雷达后向散射信号的功率的斜率,便可以反演出大气消光系数。该方法简便易行,在水平探测时精确度较高,但由于假设了大气粒子分布均匀,在倾斜探测或是反演非均匀大气条件下能见度时的结果也误差较大,不能满足实际应用的要求。
2.2. Klett反演法
Klett假设后向散射系数与大气消光系数有指数关系:
 (6)
(6)
式中 为常数,
为常数, 取决于激光雷达波长和气溶胶特性,一般在0.67到1之间。如果假定
取决于激光雷达波长和气溶胶特性,一般在0.67到1之间。如果假定 为常数,则有:
为常数,则有:
 (7)
(7)
 为最远测距,
为最远测距, 和
和 分别是
分别是 处的距离修正功率和大气消光系数。Klett提出可以用斜率法估测
处的距离修正功率和大气消光系数。Klett提出可以用斜率法估测 :
:
 (8)
(8)
由于反演时,采用最大测距 处的值
处的值 ,之后采用积分法,从远处往近处积分。通过数值模拟发现该方法对
,之后采用积分法,从远处往近处积分。通过数值模拟发现该方法对 敏感性不高,即不会因为
敏感性不高,即不会因为 的估计值出现一定误差就导致整条路径反演出现很大误差,所以Klett反演法得到的结果也比较稳定,且该方法对于非均匀大气依然有效 [8] 。
的估计值出现一定误差就导致整条路径反演出现很大误差,所以Klett反演法得到的结果也比较稳定,且该方法对于非均匀大气依然有效 [8] 。
2.3. Fernald反演法
激光雷达探测过程中,同时受到大气分子和气溶胶粒子两部分作用,后向散射信号包括气溶胶米散射和分子瑞利散射两部分:
 (9)
(9)
 和
和 分别是大气气溶胶和大气分子的消光系数。由于大气中分子的尺度、密度等分布相对稳定,分子的消光系数
分别是大气气溶胶和大气分子的消光系数。由于大气中分子的尺度、密度等分布相对稳定,分子的消光系数 可根据美国标准大气模式精确计算得到:
可根据美国标准大气模式精确计算得到:
 (10)
(10)
式中, 和
和 分别指观测位置的大气压强与温度。由(10)式得出的大气分子消光系数与实际值的相对误差一般小于3%。
分别指观测位置的大气压强与温度。由(10)式得出的大气分子消光系数与实际值的相对误差一般小于3%。
气溶胶的消光与后向散射系数比为 ,它依赖于激光波长、气溶胶粒径谱分布和复折射率,其取值范围一般在10 Sr到100 Sr之间,利用拉曼激光雷达可以对其进行较为准确的探测 [18] 。对于对流层气溶胶,可以假设
,它依赖于激光波长、气溶胶粒径谱分布和复折射率,其取值范围一般在10 Sr到100 Sr之间,利用拉曼激光雷达可以对其进行较为准确的探测 [18] 。对于对流层气溶胶,可以假设 [19] ,这意味着气溶胶的粒径谱和化学成分不随路径变化,在水平探测均匀大气时该假设成立。另一方面,大气中分子的散射消光后向散射比为常数
[19] ,这意味着气溶胶的粒径谱和化学成分不随路径变化,在水平探测均匀大气时该假设成立。另一方面,大气中分子的散射消光后向散射比为常数 。
。
由激光雷达雷达方程可得气溶胶后向散射系数:
 (11)
(11)
由式(11)和假设的气溶胶消光后向散射比可求得大气消光系数 [9] 。
3. 能见度模式
能见度激光雷达实际应用时若使用非550 nm激光,则需要进行波长修正。往常的能见度激光雷达往往使用接近550 nm的532 nm激光,而不考虑波长修正 [6] 。但在本实验中使用的是1.5 μm人眼安全能见度激光雷达,激光波长与550 nm偏差很大,若不考虑波长修正会给能见度测量带来的误差。目前已存在多种波长修正的模型,其中Kruse模型、Kim模型、Naboulsi模型是对实验数据进行拟合得到的,Grabner模型则结合了实验数据与Mie散射理论的推导。需要指出的是,这些模型所采用的数据都是本地数据,因此得出的结论与有较大差异。这几个模型的具体形式如下:
3.1. Kruse模型
Kruse模型是波长修正的一个经典模型:
 (12)
(12)
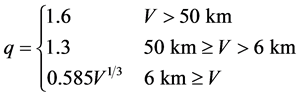
式中, 为激光波长,q的取值取决于能见度:
为激光波长,q的取值取决于能见度:
 (13)
(13)
式中, 为消光系数,
为消光系数, 为能见度。
为能见度。
这个模型被广泛应用,后续很多模型也是在Kruse模型的基础上修正得到。当能见度小于6 km时,其反演结果与实际不符。此外该模型在能见度为6 km处不连续,直接导致当消光系数在 附近变化时,能见度却没有对应数值,明显与实际情况不符。Kruse本人也指出“模型的采用实验数据是处于薄雾状态下,因此能见度小于1 km时的结果是不准确的”。在本文后续数据处理中,对断点附近的q值不采用式(13)形式的分段函数,一律取为
附近变化时,能见度却没有对应数值,明显与实际情况不符。Kruse本人也指出“模型的采用实验数据是处于薄雾状态下,因此能见度小于1 km时的结果是不准确的”。在本文后续数据处理中,对断点附近的q值不采用式(13)形式的分段函数,一律取为 。
。
3.2. Kim模型
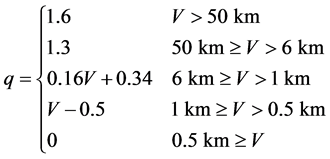
Kim在Kruse模型的基础上对能见度较低时的实验数据进行了分析。Kim假设气溶胶粒径分布为修正伽马分布,认为当能见度小于6 km时,q是变量,他提出q值应为:
 (14)
(14)
该公式在0.5 km,1 km,6 km处均连续,而且很好的解释了低能见度雨雪天气时的情况。但它并未考虑不同地方大气成分的不同,是否在中国适用需要进行实验验证。
3.3. Naboulsi模型
法国的Naboulsi利用FASCOD软件对实验数据进行模拟得到两种雾天的波长修正模型:
平流雾:
对流雾:
 (15)
(15)
值得一提的是,该模型仅使用了法国尼斯的“La Turbie”基站一个站点的观测数据,而且该模型利用数据进行纯计算机拟合,因此得到的公式也与其它模型存在较大差异,只适用于特殊天气情况,没有普遍性。
3.4. Grabner模型
瑞士的Grabner通过对Mie散射的计算得出在雾霾天气下能见度与大气消光系数的关系式为:
 (16)
(16)
其中,
 (17)
(17)
 (18)
(18)
需要说明的是上述参数选取只适用于波长大于550 nm的情况。虽然该模型结合了Mie散射原理进行推导,但式(17)是实验数据拟合的结果,式(18)中的指数0.5也是经验值,因此该模型在不同地区的适用性有待检验。
以上四种模型针对的地点、天气均有所不同,所以得到的结果也存在差异。在激光波长1.5 μm时,四种模型得到的消光系数随能见度变化关系如图1所示。从图1中可以看出在相同消光系数时,Kruse模型和Kim模型得到的能见度较小,Naboulsi模型得到的能见度最大,而Grabner模型得到的能见度在两者之间。此外,Kruse模型与Kim模型在能见度大于6 km的情况下完全相同,在4~6 km区域两者偏差较大,这是因为Kim模型只在能见度小于6 km时才对Kruse模型进行修正。
综上所述,在不同地区,不同天气条件下,建立的波长修正都有区别。因此,1.5 μm能见度激光雷达在推广应用的过程中,必须解决的问题就是当地消光系数与能见度之间的关系与哪种模型最为接近。可行的办法是对当地实测数据分别使用Kruse模型,Kim模型,Grabner模型进行反演(只有实验时发生长时间起雾现象,才需要考虑Naboulsi模型),然后将三个模型得到的能见度与传统能见度仪的结果进行比对分析。
4. 实验结果与分析
本课题组在2014年10月26日到27日于安徽省合肥市中国科学技术大学地空学院楼顶进行了24小时的水平大气消光系数观测,并对结果进行处理,得出了消光系数与能见度之间的关系。
本实验装置与传统532 nm能见度激光雷达不同,采用1548 nm种子光。以往很少使用1.5 μm激光进行大气能见度探测的原因是1.5 μm激光雷达为了保证信噪比,必须使种子光功率很大,造价比较昂贵,而且长时间连续观测容易出现机器故障;此外探测1.5 μm激光需要使用的铟镓砷探测器比532 nm激光使用的硅探测器的探测效率低得多。本实验采用图2的实验装置成功解决了这一难题,而且获得了精度极高的实验结果 [20] 。
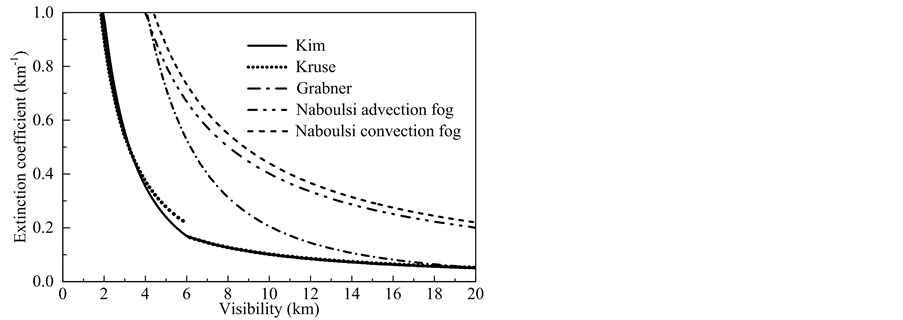
Figure 1. Extinction coefficients under different visibilities at 1.5 μm for four models
图1. 1.5 μm波长四种模式消光系数随能见度变化关系
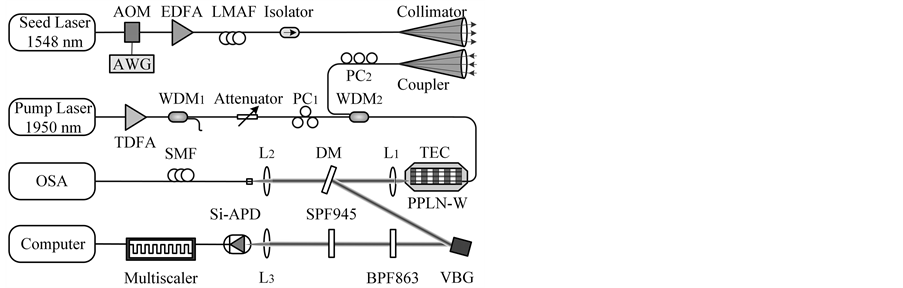
Figure 2. System layout of the 1.5 μm visibility lidar
图2. 1.5 μm能见度激光雷达系统布局
图2中所用元件包括:AOM:声光调制器;AWG:任意波形发生器;TDFA:掺铥光纤放大器;LMAF:大模场光纤;SMF:单模光纤;WDM:多路波分复用器;PC:偏振控制器;OSA:光谱分析仪;DM:分色镜;L:透镜;SPF:短通滤波器;BPS:带通滤波器;VBG:体布拉格光栅;TEC:热电冷却器;PPLN-W:周期极化铌酸锂波导。
本实验所使用的1.5 μm能见度激光雷达基本工作流程为:1548 nm种子光经过处理发射到大气中,再通过望远镜接收后向散射信号,之后通过耦合器耦合到单模光纤,随后与1950 nm泵浦光一起进入波分复用器,然后转移到周期极化铌酸锂波导中 [21] ,由于满足了准位相匹配1548 nm激光转换为863 nm激光,863 nm激光通过体布拉格光栅后,用硅探测器探测,最后送入计算机处理。
根据参考文献 [19] 的初步分析,通过26日13:00到27日13:00的测量光子计数可以看出信号并非随着距离增加平滑下降,而是在3~6 km范围内出现了尖峰。这一现象产生的原因是激光水平探测的路径穿过了几条合肥市的主干道,主干道的汽车尾气排放使得这些位置的消光系数和后向散射系数增加,从而使光子计数出现尖峰。此外,由于水平路径上大气并不均匀,斜率法不再适用,必须采用Klett与Fernald反演法才能得到准确的大气消光系数。
此外通过分析实验过程中消光系数随时间的变化关系,可以看出消光系数的第一个高峰出现在18:30,这是由于下班高峰,道路拥堵,机动车尾气排放导致空气质量变差。随后连续的几个高峰是由于工厂间歇性排烟导致。27日早上2:00到8:00期间消光系数不断降低,这是由于晚间升起的灰霾随着日出逐渐退去。但是到了27日12:00左右消光系数逐渐平稳下来,且整体高于前一天中午,这是由于工厂的排烟并不会像灰霾一样随日出散去,而是持续停留在合肥大气中。
为验证上述推论,特别选取26日17:10,18:30,20:10和27日10:00四个时刻的光子计数随距离的变化进行详细分析如图3所示。从图3中可以看出26日17:10时,回波信号随距离增长而下降,7 km处的回波光子计数约为500个;而到了18:30,由于合肥晚高峰交通拥挤,在0.7 km,1.2 km,2.2 km,4 km等距离附近回波信号出现阶梯式下降,由于激光从中科大地空学院楼顶向北发射,从地图上可以看出,这几点分别对应于金寨路,南一环路,长江中路和濉溪路;到了20:10,在3.4 km处回波信号出现明显尖峰,这是由3.4 km附近两根烟囱持续排烟导致;到了27日10:00,回波信号在7 km处的光子计数只有约130个,明显低于图3(a)中的500个,说明工厂排烟并未随日出消散,而是持续停留在合肥大气中,使得27日整体空气质量不如26日。
利用实验测得的消光系数随时间变化曲线,可以通过三种模型进行反演合肥24 h的能见度变化,得到的能见度曲线如图4所示。本实验从26日13:00持续到27日13:00,在此期间合肥气象局给出了三个时间点的能见度值:26日13:30,27日7:30和9:30时分别为11 km,3.3 km,6.0 km (表1)。Grabner模型在三个时间节点均与实际情况有明显偏差,相对误差分别为37.8%,113.5%和68.7%,显然不适用。Kruse模型与Kim模型在能见度大于6 km时一样,但Kruse模型在实际能见度位于6 km附近时,往往无法得出准确的结果。特别是在27日9时之后,消光系数位于0.2 km−1附近,恰好位于Kruse模型的断点位置,虽然计算出的能见度大于6 km,但计算时采用的却是能见度小于6 km的Kruse模型,发生矛盾;如果利用能见度大于6 km的Kruse模型进行计算会发现算出的能见度小于6 km,还是会发生矛盾。综合来看,Kim模型最符合合肥秋冬季节的天气情况,在三个时间点与实际值的平均相对误差只有7.8%。
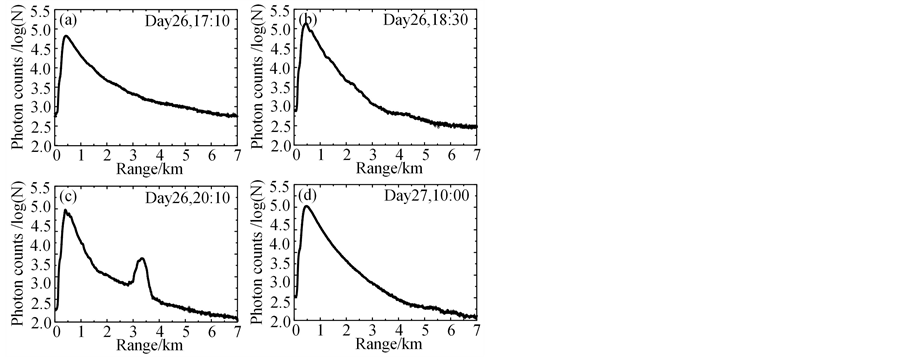
Figure 3. Experiment raw data from lidar at four moments
图3. 四个时刻的回波信号

Table 1. Retrieved visibilities of three models and the real value
表1. 三种模型反演能见度与实际值
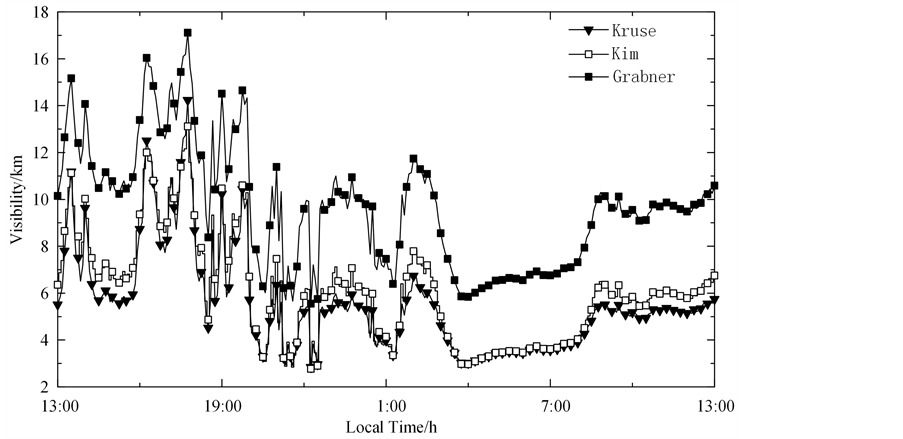
Figure 4. The comparison of retrieved visibilities from three models
图4. 三种模型反演能见度的对比
5. 总结与展望
针对现有几种能见度激光雷达的波长修正模型差异较大的问题,自行研制了1.5 µm能见度激光雷达,并在合肥地区进行了对比实验。本次探测持续24小时,有效探测距离在7 km以上,成功探测了汽车尾气排放、工厂排烟以及灰霾扩散等影响能见度大小的现象。通过对合肥地区连续24小时的观测数据进行后续处理,对现有的几种能见度波长修正模型进行了比较。发现Grabner模型反演的能见度明显与合肥实际情况不符;Kruse模型在实际能见度处于6 km附近时会给出自相矛盾的结果;综合来看Kim模型的反演结果与合肥初冬能见度一致,与实际值的偏差小于0.5 km,平均相对误差小于7.8%。因为不同地区气溶胶光学特性的差异,并不存在普适的波长修正模型。需要针对气溶胶在我国的时空分布特点,经过大量的实验观测,因时、因地给出经验修正模型。
文章引用
任敬宇,尚 祥,上官明佳,王 冲,裘家伟,夏海云. 1.5 μm能见度激光雷达的波长修正模型比较
The Comparison of Wavelength Dependence Models for 1.5 μm Visibility Lidar[J]. 光电子, 2016, 06(04): 139-148. http://dx.doi.org/10.12677/OE.2016.64020
参考文献 (References)
- 1. Wu, D., Bi, X.Y., Deng, X.J., et al. (2007) Effect of Atmospheric Haze on the Deterioration of Visibility over the Pearl River Delta. Acta Meteorologica Sinica, 21, 215. (in Chinese)
- 2. Xing, X.N., Cui, Y.M., Zhang, F.G., et al. (2010) Summary of Present Situation and Development Trend of Visibility Measurement Technology. Metrology & Measurement Technology, 5, 006. (in Chinese)
- 3. Xia, H.Y., Shangguan, M.J., Dou, X.K., et al. (2016) Micro-Pulse Upconversion Doppler Lidar for Wind and Visibility Detection in the Atmospheric Boundary Layer. Optics Letters, 41, 5218-5221. https://doi.org/10.1364/OL.41.005218
- 4. Cheng, X.W., Gong, S.S., Li, F.Q., et al. (2007) 24 h Continuous Observation of Sodium Layer over Wuhan by Lidar. Science in China Series G: Physics, Mechanics and Astronomy, 50, 287-293. (in Chinese) https://doi.org/10.1007/s11433-007-0032-z
- 5. Wu, T.F., Liang, Z.G., Yan, J.H. (2012) Theoretical Study on Air Dispersion Compensation in the Distance Measurement of Femtosecond Pulsed Laser. Chinese Journal of Lasers, 39, 1208004. (in Chinese) https://doi.org/10.3788/CJL201239.1208004
- 6. Lu, L.H., Liu, W.Q., Zhang, T.S., et al. (2014) A new Micro-Pulse Lidar for Atmospheric Horizontal Visibility Measurement. Chinese Journal of Lasers, 41, 0908005. (in Chinese) https://doi.org/10.3788/CJL201441.0908005
- 7. Koschmieder, H. (1925) Theorie der horizontalensichtweite: Kontrast und sichtweite. Keim&Nemnich.
- 8. Klett, J.D. (1981) Stable Analytical Inversion Solution for Processing Lidar Returns. Applied Optics, 20, 211-220. https://doi.org/10.1364/AO.20.000211
- 9. Fernald, F.G. (1984) Analysis of Atmospheric Lidar Observations: Some Comments. Applied Optics, 23, 652-653. https://doi.org/10.1364/AO.23.000652
- 10. Xie, C.B., Han, Y., Li, C., et al. (2005) Mobile Lidar for Visibility Measurement. High Power Laser Part Beams, 17, 971-975.
- 11. Hua, D. and Song, X. (2008) Advances in Lidar Remote Sensing Techniques. Infrared and Laser Engineering, 38, 21-27. (In Chinese)
- 12. Shangguan, M., Xia, H., Wang, C., et al. (2016) All-Fiber Upconversion High Spectral Resolution wind Lidar Using a Fabry- Perot Interferometer. Optics Express, 24, 19322-19336. https://doi.org/10.1364/OE.24.019322
- 13. Kruse, P.W., McGlauchlin, L.D. and McQuistan, R.B. (1962) Elements of Infrared Technology: Generation, Transmission and Detection. Wiley, New York.
- 14. Kim, I., McArthur, B. and Korevaar, E. (2001) Comparison of Laser Beam Propagation at 785 nm and 1550 nm in Fog and Haze for Optical Wireless Communications. International Society for Optics and Photonics, 26-37. https://doi.org/10.1117/12.417512
- 15. Al Naboulsi, M. (2004) Fog Attenuation Prediction for Optical and Infrared Waves. Optical Engineering, 43, 319-329. https://doi.org/10.1117/1.1637611
- 16. Grabner, M. and Kvicera, V. (2011) The Wavelength Dependent Model of Extinction in Fog and Haze for Free Space Optical Communication. Optics Express, 19, 3379-3386. https://doi.org/10.1364/OE.19.003379
- 17. Claus, W. (2006) Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere Springer, Berlin.
- 18. Gong, W., Zhang, J., Mao, F., et al. (2010) Measurements for Profiles of Aerosol Extinction Coeffcient, Backscatter Coeffcient, and Lidar Ratio over Wuhan in China with Raman/Mie Lidar. Chinese Optics Letters, 8, 533-536.
- 19. Sasano, Y. (1996) Tropospheric Aerosol Extinction Coefficient Profiles Derived from Scanning Lidar Measurements over Tsukuba, Japan, from 1990 to 1993. Applied Optics, 35, 4941-4952. https://doi.org/10.1364/AO.35.004941
- 20. Xia, H., Shentu, G., Shangguan, M., et al. (2015) Long-Range Micro-Pulse Aerosol Lidar at 1.5 μm with an Upconversion Single-Photon Detector. Optics Letters, 40, 1579-1582. https://doi.org/10.1364/OL.40.001579
- 21. Shentu, G., Pelc, J.S., Wang, X., et al. (2013) Ultralow Noise Up-Conversion Detector and Spectrometer for the Telecom Band. Optics Express, 21, 13986-13991. https://doi.org/10.1364/OE.21.013986
*通讯作者。