Modeling and Simulation
Vol.04 No.01(2015), Article ID:14753,8
pages
10.12677/MOS.2015.41002
Four-Rotor Robot Trajectory Tracking Control Based on Model Reference Dynamic Inversion
Yichong He1, Lifeng Wang2, Shengwei Ji1
1CTEC System Engineering Co., Ltd, Beijing
2Electric and Automation Institute of North China University of Technology, Beijing
Email: baiheduo@163.com, lf_wang@ncut.edu.cn, stonebystone@163.com
Received: Jan. 1st, 2015; accepted: Jan. 20th, 2015; published: Jan. 23rd, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
This paper deals with the trajectory tracking problem of “X” configuration quad-rotor robots. In order to reduce the effects of model parameter uncertainty and external disturbances, the model reference adaptive method united with dynamic inversion is adopted in the attitude loop controller. The nonlinear dynamic inversion is used to eliminate the nonlinear characteristics, the model reference method is used to weaken the steady-state error caused by the parameter perturbation and external disturbances. The simulation results show that the quad-rotor robot trajectory tracking controller is feasible and effective and the combination of model reference adaptive and dynamic inversion method shows good robustness.
Keywords:Quad-Rotor Robots, Dynamic Inversion, Model Referencing, Trajectory Tracking
基于模型参考动态逆的四旋翼机器人 轨迹跟踪控制研究
何伊崇1,王立峰2,姬生伟1
1北京广利核系统工程有限公司,北京
2北方工业大学电气与自动化学院,北京
Email: baiheduo@163.com, lf_wang@ncut.edu.cn, stonebystone@163.com
收稿日期:2015年1月1日;录用日期:2015年1月20日;发布日期:2015年1月23日

摘 要
研究“X”型布局的四旋翼机器人的轨迹跟踪问题。为减小模型参数的不确定性和外界扰动对控制器的影响,本文提出在姿态回路动态逆控制器中加入模型参考自适应方法,采用动态逆方法消除原模型的非线性,模型参考自适应方法解决参数摄动与外部扰动带来的稳态误差。仿真结果表明四旋翼的轨迹跟踪控制器是可行有效的,模型参考自适应与动态逆方法的结合具有良好的鲁棒性。
关键词 :四旋翼机器人,动态逆,模型参考,轨迹跟踪

1. 引言
四旋翼机器人凭借其巧妙结构具有机动性强、飞行原理简单、安全性高等特点,不仅在军事上具有广阔的应用前景,在民用领域也显示出极强的商业潜能。近几年,四旋翼机器人已逐渐普及到国民生活之中,地震灾情监测、外景节目航拍、航模论坛等,都可以看见四旋翼机器人的身影。在对四旋翼的研究热潮中,如何获得更好的轨迹跟踪性能成为国内外研究人员的研究重点与难点之一。
四旋翼机器人具有欠驱动、非线性、强耦合和时变动力学特性,这些特点造成其具有复杂且不确定的动力学模型,飞行控制难度增大。目前,国内外针对四旋翼机器人的飞行控制,提出了很多典型的控制方法策略。传统的控制策略往往是将四旋翼模型线性化,在此基础上运用线性控制理论加以控制,如PID、LQ控制等。文献[1] 分别使用PI和PID控制方法来跟踪轨迹和保持飞行路径。文献[2] 提出了一种PID参数增益是非线性的PID控制方法。线性化控制器容易实现,但必须对四旋翼模型进行一定简化,忽略其非线性因素,实际控制效果并不好。因此,越来越多的学者基于现代非线性控制理论研究四旋翼机器人的控制方法,目前应用较多的有动态逆控制,反步法(Backstepping)控制,滑膜控制,神经网络控制等。文献[3] 基于简化动力学模型,利用反步法设计了飞行控制器,应用“误差–误差”原理将自抗扰控制器(ADRC)用于四旋翼姿态控制,实现四旋翼无人机定点悬停和轨迹跟踪飞行控制。文献[4] 提出了一种基于反步法的滑模控制来稳定系统和跟踪轨迹,然而这种控制方法没有考虑噪音和外部干扰。文献[5] [6] 在常规动态逆方法的基础上加以改进,加强控制器的跟踪特性和鲁棒特性。文献[7] 设计了基于神经网络补偿的无人机动态逆自主飞行控制系统。其中,动态逆方法以其物理概念清晰,适用面宽,应用简单等优势,具有较高的工程实用价值。然而,动态逆方法是以对象模型足够精确为前提,对于四旋翼这类具有不确定性的模型,需要通过某种方法提高动态逆方法的鲁棒性[8] [9] 。
模型参考自适应控制(MRAC)是一种传统自适应控制方案,设计一个与对象同阶的定常参考模型来获得期望的性能指标,根据实际系统与参考模型输出的误差设计自适应律,实时修正控制器参数,以适应对象特性的变化[10] 。文献[11] 分别采用常规动态逆和模型参考动态逆设计了战斗机飞行控制律,仿真表明模型参考动态逆能够获得更好的跟踪能力。
本文在国内外研究基础上,提出将模型参考自适应结构加入四旋翼的姿态回路动态逆控制器,固定一组理想飞行参数代入四旋翼原始模型中,作为参考模型,通过参考模型与实际系统之间的误差不断修正控制器参数,使实际系统可以逼近参考模型的输出,补偿系统因建模误差及外部干扰所产生的逆误差,提高系统稳定性和抗扰动性。在轨迹控制位置环与姿态环的嵌套传递中,该方法能在提升控制效果同时不增加控制器复杂程度,非常适合工程应用。最后通过仿真试验,在给出一定的参数摄动与外部扰动情况下,比较普通动态逆与模型参考动态逆的控制效果,验证控制策略设计的有效性。
2. 动力学建模
2.1. 实验平台
本文以实验室搭建的四旋翼机器人平台为研究对象,如图1所示。机身为X型配置,采用Mega2560为机载CPU,姿态感测模块包括六轴数字陀螺仪MPU6000,三轴磁阻计HMC5883L,高度气压计MS5611-01BA01,声纳传感 MB1200,这些传感器实时检测四旋翼机器人的姿态和位置信息,机载CPU根据预定的控制算法,对遥控器/地面站的指令和传感器检测到的当前状态量进行分析解算,得到四个电机的转速控制量,从而改变四旋翼的线速度和姿态角完成相应运动,达到轨迹跟踪及自主避障的目的。
2.2. 六自由度模型
该四旋翼机器人为X型架构,旋翼 、
、 与
与 、
、 关于
关于 轴对称,
轴对称, 、
、 与
与 、
、 关于
关于 轴对称。四旋翼通过改变四个旋翼的速度,来实现沿三个体坐标轴的线运动(前后、左右,升降)和绕三个体坐标轴的角运动(滚转、俯仰和偏航),是一个四输入六输出系统。如图2所示,按右手规则分别定义地面坐标系
轴对称。四旋翼通过改变四个旋翼的速度,来实现沿三个体坐标轴的线运动(前后、左右,升降)和绕三个体坐标轴的角运动(滚转、俯仰和偏航),是一个四输入六输出系统。如图2所示,按右手规则分别定义地面坐标系 和机体坐标系
和机体坐标系 ,来描述四旋翼在空中的位置运动和姿态运动。其中,机体坐标系
,来描述四旋翼在空中的位置运动和姿态运动。其中,机体坐标系 原点与机体质量中心重合。定义
原点与机体质量中心重合。定义 (滚转)、
(滚转)、 (俯仰)、
(俯仰)、 (偏航)这三个姿态角,分别为绕
(偏航)这三个姿态角,分别为绕 轴、
轴、 轴、
轴、 轴旋转到
轴旋转到 的角度,从而得到机体坐标系到地面坐标系的导航转换矩阵
的角度,从而得到机体坐标系到地面坐标系的导航转换矩阵 ,及机体角速度到姿态角速率的转换矩阵
,及机体角速度到姿态角速率的转换矩阵 ,其中,c代表
,其中,c代表 ,s代表
,s代表 。
。
 (1)
(1)
 (2)
(2)
将四旋翼机器人的运动看成六自由度刚体运动,其运动方程式包括以牛顿第二定律为基础的动力学方程及通过坐标变换关系得出的运动学方程,如式(3)至式(6)所示。
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
其中, ,
, 分别表示四旋翼机器人质心相对于机体坐标系的三轴线速度和三轴角速度;
分别表示四旋翼机器人质心相对于机体坐标系的三轴线速度和三轴角速度; 表示相对于地面坐标系的空间位置向量;
表示相对于地面坐标系的空间位置向量; 表示机体相对于地面坐标系的姿态角向量;
表示机体相对于地面坐标系的姿态角向量; ,
, 分别表示机体坐标系下所受的合力与合力矩;
分别表示机体坐标系下所受的合力与合力矩; ,
, 分别表示导航转换矩阵与角度转换矩阵;
分别表示导航转换矩阵与角度转换矩阵; 表示机器人的总质量;
表示机器人的总质量; 为惯性矩阵;
为惯性矩阵; 表示斜对称矩阵,对于任意向量
表示斜对称矩阵,对于任意向量 ,有
,有 。
。

Figure 1. Four-rotor robot platform
图1. 四旋翼机器人平台
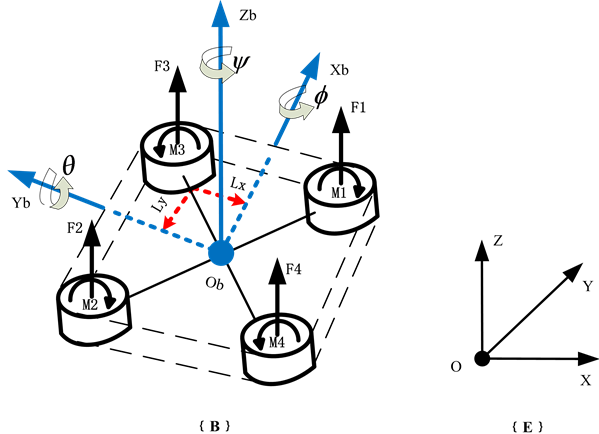
Figure 2. Coordinate system definition and stress analysis
图2. 坐标系定义及受力分析
四旋翼机器人由四个旋翼分别转动提供动力,完成空中姿态的变化及垂直方向的位移,包括沿三个轴向的合外力矩和垂直于机体方向合外力,可表示如下:
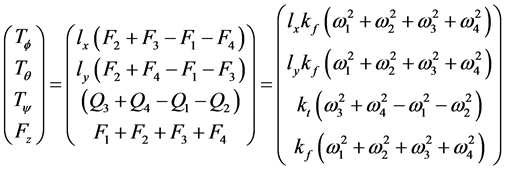 (7)
(7)
其中 ,
, 分别表示体坐标系下电机到
分别表示体坐标系下电机到 ,
, 轴的距离,
轴的距离, ,
, 分别为每个旋翼产生的拉力和反扭力矩,
分别为每个旋翼产生的拉力和反扭力矩, 表示为旋翼提供动力的电机转速,
表示为旋翼提供动力的电机转速, ,
, 分别表示拉力转换系数与力矩转换系数。
分别表示拉力转换系数与力矩转换系数。
2.3. 电机简化模型
由于螺旋桨旋转速度与无刷直流电机的输入电压成正比,在执行飞行任务时,控制系统输出脉宽调制(PWM)信号来控制电机的输入电压进而控制电机转速。假设供电电压,电机转速分别为 ,
, ,电机电感忽略不计,建立电机的简化模型[6] ,表示如下:
,电机电感忽略不计,建立电机的简化模型[6] ,表示如下:
 (8)
(8)
其中, ,
, ,
, 为电机模型相关参数,具体数据见表1。
为电机模型相关参数,具体数据见表1。
3. 模型参考动态逆控制器设计
在利用动态逆方法设计控制器时,根据角速度、姿态角、线速度等状态向量响应速度的不同,将控制系统划分为快、较快、慢三个回路。在这三个回路中,慢回路作为轨迹跟踪回路,主要控制机器人的垂向位移和纵向、横向速度;快回路与较快回路作为姿态跟踪回路,控制机器人的姿态和角速度。当姿态回路开始响应并稳定后,轨迹跟踪回路的响应才开始,然后逐渐达到稳定。因此,要实现轨迹跟踪,姿态控制是关键。
3.1. 模型参考动态逆控制原理
模型参考自适应控制的基本原理是:根据被控对象结构和控制要求,设计参考模型,其输出表达我们对系统跟踪输入指令的期望响应,然后通过参考模型输出与实际系统输出之差来调整控制器参数,从而使实际系统输出趋近于参考模型输出。模型参考动态逆控制将模型参考自适应与动态逆结构结合在一起,其结构图如图3所示。
假设四旋翼系统G可写成如下仿射型方程形式,即:
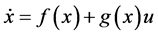 (9)
(9)
其中, 是状态向量,
是状态向量, 是控制向量,
是控制向量, 是非线性动态函数,
是非线性动态函数, 是非线性控制分布函数。
是非线性控制分布函数。
对于系统G应用动态逆方法,即通过逆系统与期望的动态响应表示控制向量 ,
, 表示期望的动态响应,得到动态逆控制律为:
表示期望的动态响应,得到动态逆控制律为:
 (10)
(10)
若系统存在不准确性,则动态逆控制律变为:
 (11)
(11)
将 表达如下:
表达如下:
 (12)
(12)
事实上,模型误差总是存在的,如果在参考模型 的情况下,控制由参考模型与真实系统误差
的情况下,控制由参考模型与真实系统误差 替代输入,这样模型参考动态逆控制减小了稳态误差,克服了模型的不确定性因素,提高了系统的鲁棒性。
替代输入,这样模型参考动态逆控制减小了稳态误差,克服了模型的不确定性因素,提高了系统的鲁棒性。
3.2. 姿态控制
由于机器人建模误差,逆误差和模型不确定性直接影响四旋翼快变量,可以设想只要控制器设计恰
当,在快变量影响其余变量前使误差收敛,就能起到抗干扰和不确定性的效果。因此,在快回路中加入模型参考动态逆控制器,结构图如图4所示。
在快回路中引入模型参考动态逆控制器,参考模型按照式(3)至式(7)建立,模型参数如表1所示,当实际系统有参数摄动或扰动时,检验这种算法是否能够改善实际模型的响应。
快回路的常规动态逆控制律由式(4)转换得到:

Table 1. Four-rotor robot model parameters
表1. 四旋翼机器人模型参数
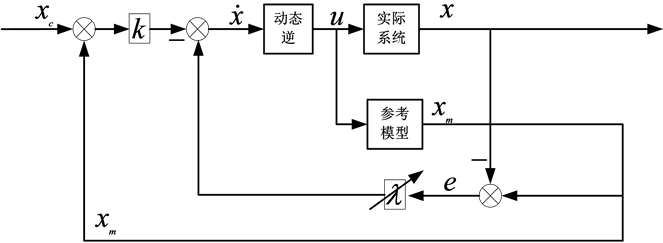
Figure 3. Dynamic inverse model references
图3. 模型参考动态逆结构图
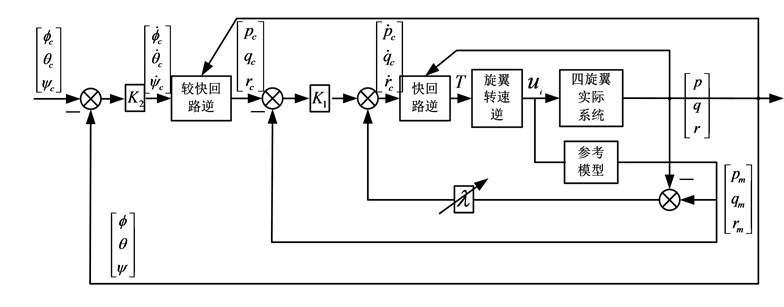
Figure 4. Attitude loop dynamic inversion model reference
图4. 姿态回路模型参考动态逆控制
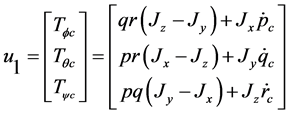 (14)
(14)
普通动态逆方法下,期望的角加速度 由一阶惯性环节表示:
由一阶惯性环节表示:
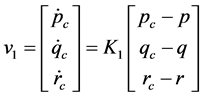 (15)
(15)
其中, 表示系统角速度输出对角速度指令的跟踪速率,用常数矩阵表示,引入模型参考自适应结构后,角加速度表达式变为:
表示系统角速度输出对角速度指令的跟踪速率,用常数矩阵表示,引入模型参考自适应结构后,角加速度表达式变为:
 (16)
(16)
 为自适应参数,通过它来调整控制器参数,实现实际系统对参考模型的跟踪,利用最速下降法对
为自适应参数,通过它来调整控制器参数,实现实际系统对参考模型的跟踪,利用最速下降法对 进行如下约束,只有当实际系统角速度输出无限接近于角速度指令,
进行如下约束,只有当实际系统角速度输出无限接近于角速度指令, 才停止变化。
才停止变化。
 (17)
(17)
根据以上分析,最终可得到快回路的模型参考动态逆控制律:
 (18)
(18)
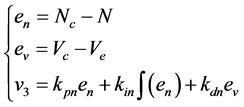
3.3. 轨迹跟踪控制
系统的位置回路方程如式(3)、(6)所示,其状态量包括机器人相对于地面坐标系的位置坐标和线速度,即 ,
, ,这组状态变量是控制无人机飞行轨迹所必需的。慢回路通过轨迹指令
,这组状态变量是控制无人机飞行轨迹所必需的。慢回路通过轨迹指令 及状态变量
及状态变量 的反馈得到机器人的姿态与垂直升降控制量
的反馈得到机器人的姿态与垂直升降控制量 。
。
在位置回路中,加速度 与
与 存在如下关系式:
存在如下关系式:
 (19)
(19)
 通过PID控制器得到,其中
通过PID控制器得到,其中 为位置向量之差,
为位置向量之差, 为线速度向量之差,
为线速度向量之差, 有如下表达式:
有如下表达式:
 (20)
(20)
得到整个位置回路控制结构如图5所示。
4. 试验结果分析
在普通动态逆控制下,给定任务规划航点如表2所示,仿真时,给四旋翼系统模型一定的参数摄动:将转动惯量 分别减小30%,力矩转换系数
分别减小30%,力矩转换系数 与拉力转换系数
与拉力转换系数 分别增大30%。仿真时间为10 s,在2 s到3 s之间加一个干扰力矩
分别增大30%。仿真时间为10 s,在2 s到3 s之间加一个干扰力矩 :
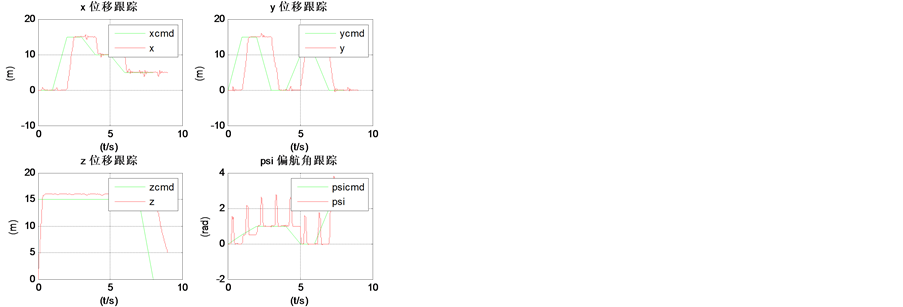
: 。得到的轨迹跟踪曲线如图6(a)、图6(b)所示,可以看出,当四旋翼参数发生摄动及飞行过程中受到阵风干扰时,普通动态逆对给定轨迹的跟踪性能变差,z轴位移产生稳态误差,在转折点处漂移严重。
。得到的轨迹跟踪曲线如图6(a)、图6(b)所示,可以看出,当四旋翼参数发生摄动及飞行过程中受到阵风干扰时,普通动态逆对给定轨迹的跟踪性能变差,z轴位移产生稳态误差,在转折点处漂移严重。
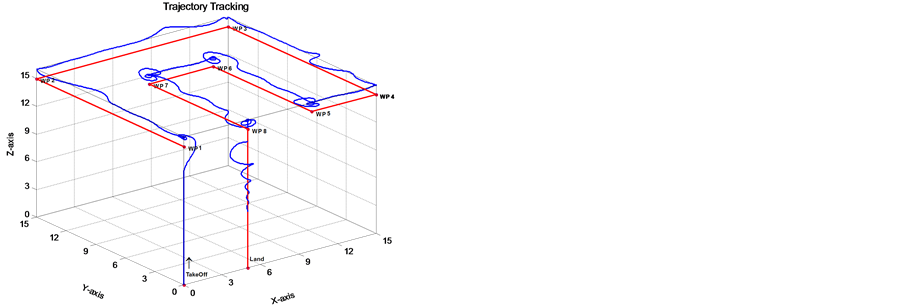
在同样的参数摄动与任务规划下,通过模型参考动态逆控制得到的轨迹跟踪曲线如图7(a)、图7(b)所示,
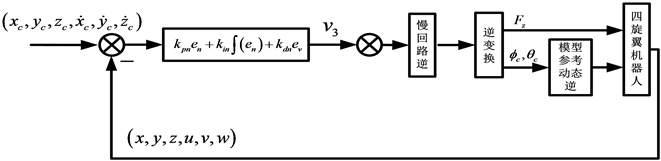
Figure 5. Position loop PID dynamic inversion control
图5. 位置回路PID动态逆控制
 (a) (b)
(a) (b)
Figure 6. (a) Trajectory command response; (b) Three-dimensional response
图6. (a) 轨迹命令响应;(b) 三维空间响应
Table 2. Planning path
表2. 任务规划路径
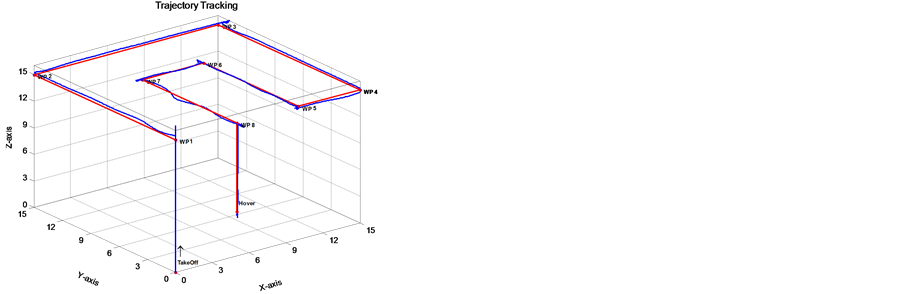
Figure 7. (a) Trajectory command response; (b) Three-dimensional response
图7. (a) 轨迹命令响应;(b) 三维空间响应
可以看出,与普通动态逆控制效果相比,系统的抗参数摄动和外部干扰能力明显改善。
5. 总结
本文在建立四旋翼的非线性模型基础上,结合动态逆方法与模型参考自适应方法,设计四旋翼的轨迹跟踪控制器。通过动态逆方法消除原模型的非线性,通过模型参考自适应方法解决参数摄动与外部扰动带来的稳态误差,参考模型与实际模型的误差反馈来调整控制器的系数,使控制更加准确,在给定参数摄动与外部扰动下,比较模型参考动态逆方法与普通动态逆方法的控制效果,验证了算法的有效性。
文章引用
何伊崇,王立峰,姬生伟, (2015) 基于模型参考动态逆的四旋翼机器人轨迹跟踪控制研究
Four-Rotor Robot Trajectory Tracking Control Based on Model Reference Dynamic Inversion. 建模与仿真,01,8-16. doi: 10.12677/MOS.2015.41002
参考文献 (References)
- 1. Hoffmann, G., Rajnarayan, D.G., Waslander, S.L., et al. (2009) The Stanford testbed of autonomous rotorcraft for mul-ti-Agent control (STARMAC). The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 404- 405.
- 2. Su, Y.X., Sun, D. and Duan, B.Y. (2005) Design of an enhanced nonlinear PED Controller. Mechatronics, 8, 1005- 1024.
- 3. 聂博文 (2006) 微小型四旋翼无人直升机建模及控制方法研究. 国防科学技术大学, 长沙, 4: 113-117.
- 4. Bouadi, H., Bouchoucha, M. and Tadjine, M. (2007) Sliding mode control based on backstepping ap-proach for an UAV type Quadrotor. World Academy of Science, Engineering and Technology, 26, 22-27.
- 5. Wang, L.F., He, Y.C., Zhang, Z.X. and He, C.K. (2013) Trajectory tracking of quadrotor aerial robot using improved dynamic inversion method. Intelligent Control and Automation, 4, 343-348.
- 6. 单海燕 (2008) 四旋翼无人直升机飞行控制技术研究. 南京航空航天大学, 南京.
- 7. 于秀萍, 赵希人 (2004) 基于动态逆系统和神经网络理论的 BTT导弹控制系统研究. 哈尔滨工程大学, 哈尔滨.
- 8. 单海燕 (2008) DI/QFT控制器在四旋翼无人直升机飞行控制中的应用. 电光与控制, 12, 68-71.
- 9. 李林侃 (2007) 无人机鲁棒动态逆控制研究. 西北工业大学, 西安.
- 10. 张艳 (2010) 基于RBF网络辨识的模型参考自适应控制系统分析与仿真. 西南交通大学, 成都.
- 11. 龙晋伟, 潘文俊, 王立新 (2013) 战斗机动态逆控制律对比研究. 飞行力学, 4, 297-300.