Artificial Intelligence and Robotics Research
Vol.2 No.4(2013), Article ID:12608,4 pages DOI:10.12677/AIRR.2013.24019
Destination Consensus Control of Multi-Robots Based on Modified Particle Swarm Optimization*
1College of Information Engineering, Yangzhou University, Yangzhou
2State Key Laboratory of Management and Control of Complex Systems, Institute of Automation, Chinese Academy of Sciences, Beijing
Email: #yang@yzu.edu.cn
Received: Aug. 15th, 2013; revised: Sep. 5th, 2013; accepted: Sep. 14th, 2013
Copyright © 2013 Chunbo Ni et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
ABSTRACT:
Considering the uncertain information about the shape, size and position of an obstacle in a dynamic working environment, obstacle information is estimated by employing the least square method and acquisition data from robot sensors, which can lead to improvement of environment perception and determination capability. By defining the three fitness components via destination information, ambient environment information, robot motion information, a modified particle swarm optimization scheme is proposed to achieve the destination consensus of multi-robot systems with the advantage of good local optimization virtue. Finally, the simulation experiments demonstrated the effectiveness and feasibility of the proposed strategy.
Keywords: Multi-Robots; Particle Swarm Optimization; Consensus; Motion Control
基于改进粒子群优化的多机器人目标一致性控制*
倪春波1,孔一斐1,杨月全1#,曹志强2
1扬州大学信息工程学院,扬州
2中国科学院自动化研究所,复杂系统管理与控制国家重点实验室,北京
Email: #yang@yzu.edu.cn
摘 要:
针对不确定环境中障碍物的形状和位置等信息未知情形,通过机器人自身传感器获取环境信息,采用最小二乘方法对运行环境中两类障碍物进行拟合估计,提高机器人对环境的感知识别能力。将机器人运动目标信息、周围环境信息、机器人运动信息等衍生的适应度分量引入改进的粒子群优化适应度函数,从而提高粒子的局部选优能力;在此基础上,实现了多机器人系统的目标一致性运动控制。通过仿真实验进一步验证了该策略的可行性和有效性。
收稿日期:2013年8月15日;修回日期:2013年9月5日;录用日期:2013年9月14日
关键词:多机器人;粒子群优化;一致性;运动控制
1. 引言
随着计算机技术、控制理论、人工智能的不断发展,机器人研究与应用得到了迅速的发展,在工业、军事、航空航天、服务行业等得到广泛应用[1]。针对机器人运动一致性研究问题已受到国内外研究学者的关注。一致性研究主要有两大类:一是研究多机器人(多智能体)在各种不同运动环境(网络拓扑结构)中协作运行至共同目标位置的策略;二是研究多机器人(多智能体)在各类复杂运动环境中能够有效形成和保持各类队形任务且有效避障的控制问题。文献[2]通过建立乘性势能函数和变换映射,实现多机器人系统的由数个基本队形到动态复合队形的一致性控制。多机器人进行群体运动时必须避免碰撞,文献[3]定义一致测量函数来调节智能体粒子间的排斥力。文献[4]讨论了多智能体系统一致性特性与智能体输入延迟以及拓扑网络中通信延迟的关系与条件。针对机器人群体运动中动态形状难以协调问题。利用群体算法思想,基于光滑人工势函数,文献[5]融合了基于梯度协议和速率协议基础上给出了队形控制策略。
粒子群优化(PSO),是由Kennedy和Eberhart等[6]于1995年提出的一种进化计算技术。粒子群优化是对鸟群觅食过程中的迁徙和群集的模拟,对周围个体运动信息的观察和分析来指导种群按照一定的规则进行运动[7]。文献[8]基于多种群Lotka-Voleterra竞争方程,提出了基于种群密度的多子群粒子群优化算法。通过采用神经网络训练碰撞罚函数,在得到无碰路径基础上,文献[9]提出融合粒子群优化的最优路径规划方法。结合运动障碍物和其他机器人的速度信息基础上,文献[10]利用速度障碍规划了机器人的避碰和避障区域,采用粒子群优化实现对机器人的三类基本行为进行融合的动态路径规划方法。通过在粒子群的迭代过程中加入动态的惯性权重,并考虑约束条件,文献[11]将改进后的粒子群优化算法应用于消防机器人的路径规划问题。
由于机器人自身传感器获取环境能力的限制和实际工作环境的约束,实际上机器人获取粒子群全局最优粒子较为困难。在文献[12]研究的基础上,本文重点通过综合机器人目标位置、周围局部环境、机器人运动方向等主要信息构造了改进的机器人适应度函数,进行当前某机器人的邻近最优粒子的选择,充分运用粒子群优化的良好性能及多机器人之间相互作用,实现多机器人集群的目标一致性运动控制。
2. 环境感知
在未知环境中机器人利用自身传感器可以感测周围环境的信息。本文设机器人通过激光测距获取关于周围障碍物的分布及距离信息等,机器人每隔10˚进行采样,传感器采样一周获得的数据信息记为 ,
,![]() ,其中
,其中![]() 是传感器测距仪的返回值,
是传感器测距仪的返回值, 是测距方向与机器人当前运动方向间的夹角,
是测距方向与机器人当前运动方向间的夹角, 。这里主要考虑在运行环境中矩形类和椭圆形类两大类障碍物的情形。
。这里主要考虑在运行环境中矩形类和椭圆形类两大类障碍物的情形。
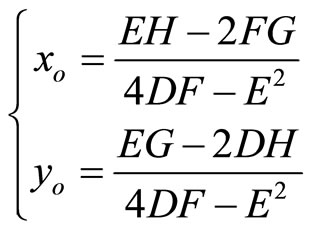
首先考虑矩形类障碍物情形。设某机器人![]() 探测到其周围某矩形障碍物
探测到其周围某矩形障碍物 的一侧情形,如图1所示。设该矩形类障碍物边缘直线方程的一般形式为
的一侧情形,如图1所示。设该矩形类障碍物边缘直线方程的一般形式为
 (1)
(1)
若机器人![]() 获取的该障碍物的采样数据为
获取的该障碍物的采样数据为 ,
,
 ,其中,
,其中, ,
, 表示机器人传感器所能测到的最远有效距离。建立局部直角坐标系
表示机器人传感器所能测到的最远有效距离。建立局部直角坐标系![]() :以机器人
:以机器人![]() 质点为圆心,前进方向为
质点为圆心,前进方向为![]() 轴正方向,以
轴正方向,以![]() 轴正方向逆时针旋转90°为
轴正方向逆时针旋转90°为 轴正方向,如图1所示。
轴正方向,如图1所示。
首先将障碍物的边缘数据进行坐标变换如下
 (2)
(2)
其中,
 ,并设
,并设
 (3)
(3)
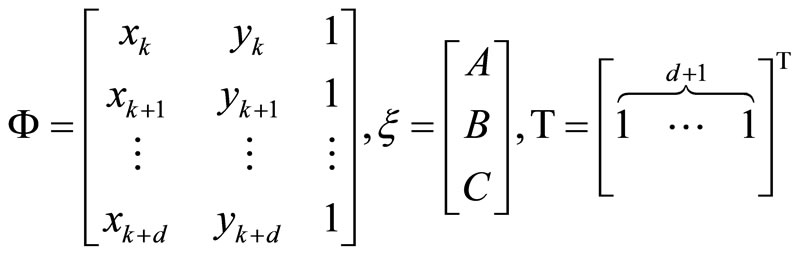
采用最小二乘算法,易得当 为非奇异时,该矩形障碍物边缘直线方程的系数估计值为
为非奇异时,该矩形障碍物边缘直线方程的系数估计值为
 (4)
(4)
综上数据分析可以得到机器人障碍曲线的方程一次估计值。
再考虑椭圆形类障碍物拟合情况[12],不妨设某机器人![]() 探测到某椭圆形障碍物
探测到某椭圆形障碍物 的情形,如图2所示。设该椭圆形障碍物的方程为
的情形,如图2所示。设该椭圆形障碍物的方程为
![]() (5)
(5)
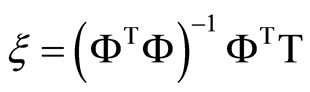
则易得该障碍物的中心点坐标可以表示如下
 (6)
(6)
令矩阵 ,
,![]() ,
, 是矩阵
是矩阵![]() 的两
的两
Figure 1. Square-like obstacle sensed by a robot
图1. 机器人感测环境矩形类障碍物
个特征值,则椭圆形障碍物 的长轴和短轴的大小可以表示为
的长轴和短轴的大小可以表示为
 (7)
(7)
 (8)
(8)
设机器人![]() 获得的障碍物的有效数据
获得的障碍物的有效数据 ,
,
 。如图2所示。
。如图2所示。
通过坐标变换有
 (9)
(9)
其中,
 ,取
,取 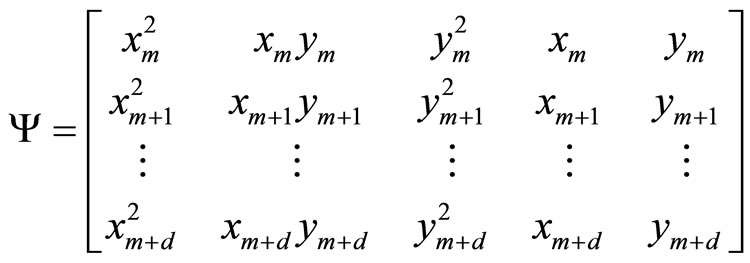 ,
, ,
, ,采用最小二乘算法,易得当
,采用最小二乘算法,易得当 为非奇异时,可得到该椭圆形类障碍物曲线方程的系数估计为
为非奇异时,可得到该椭圆形类障碍物曲线方程的系数估计为
 (10)
(10)
综上,可得到该椭圆形障碍物曲线的隐式方程、中心坐标和特征大小的一次估计值。
3. 改进的粒子群优化
粒子群优化作为群智能算法之一。然而在大多数
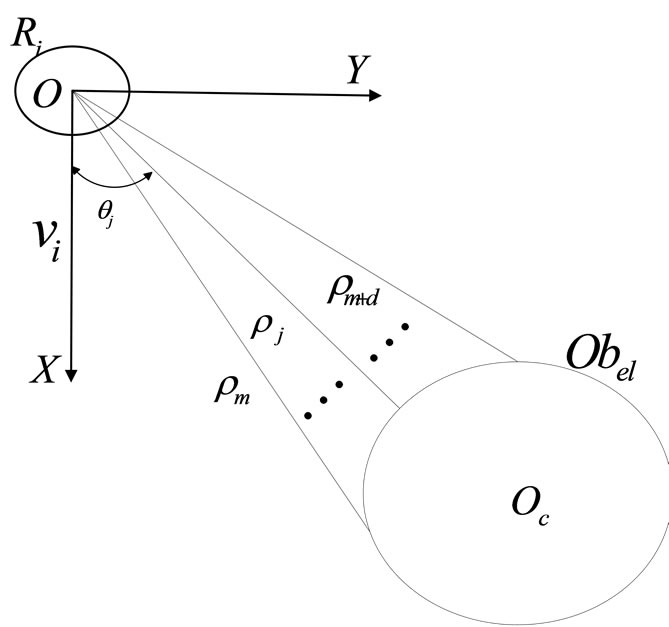
Figure 2. Circle-like obstacle sensed by a robot
图2. 机器人感测环境中椭圆形类障碍物
情况下,由于传感器感测范围的限制,机器人只能获取感知范围内的其它机器人信息。这里通过综合目标信息、环境信息以及感知范围内其它机器人的运动信息来构建改进的机器人适应度函数,在此基础上应用粒子群优化策略实现多机器人系统的目标一致性运动控制。
结合目标信息、环境信息、感知到的周围机器人运动信息来定义机器人适应度函数的三个适应度分量 、
、 和
和 。不妨设当前机器人为
。不妨设当前机器人为 ,其感测到周围机器人为
,其感测到周围机器人为![]() ,
, 。在全局坐标系为
。在全局坐标系为 中目标点的位置为
中目标点的位置为 ,
,![]() 的当前位置为
的当前位置为 。首先考虑机器人
。首先考虑机器人![]() 当前位置与目标点的距离信息,适应度分量
当前位置与目标点的距离信息,适应度分量 定义为
定义为
 (11)
(11)
其中, 为权重系数。
为权重系数。
其次,考虑机器人![]() 的适应度函数受障碍物影响情形。设该部分作用的适应度分量为
的适应度函数受障碍物影响情形。设该部分作用的适应度分量为 。这里引进障碍探测影响面积
。这里引进障碍探测影响面积 来刻画运行环境中障碍物对机器人影响的大小。设在机器人
来刻画运行环境中障碍物对机器人影响的大小。设在机器人![]() 局部坐标系
局部坐标系![]() 中,探测到某矩形障碍物的两侧坐标为
中,探测到某矩形障碍物的两侧坐标为 与
与 ,其直角坐标为
,其直角坐标为 与
与 ,如图3所示。
,如图3所示。
设机器人半径为 ,则
,则 可表示为
可表示为
 (12)
(12)
其中, 为绝对值函数,
为绝对值函数,
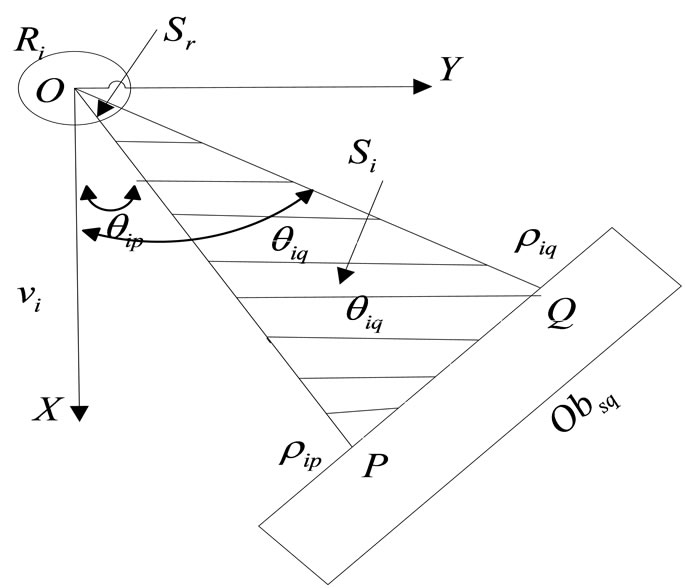
Figure 3. The area sensed through square-like obstacle
图3. 矩形类障碍探测区域面积
对于椭圆类障碍物情形。不妨设,![]() 能探测到障碍物的两侧坐标为
能探测到障碍物的两侧坐标为 与
与 ,其直角坐标为
,其直角坐标为 与
与 ,
, 为探测到椭圆形障碍物的中心坐标,如图4所示。
为探测到椭圆形障碍物的中心坐标,如图4所示。
则障碍物影响面积 可近似计算为
可近似计算为
 (13)
(13)
其中, 为障碍近似半径大小。由(12)与(13)情形,适应度分量
为障碍近似半径大小。由(12)与(13)情形,适应度分量 定义为
定义为
![]() (14)
(14)
其中, 为权重系数,
为权重系数, 由具体障碍物类别确定。
由具体障碍物类别确定。
再考虑机器人前进方向对适应度函数的影响。记本部分适应度分量为 。考虑机器人运动方向与机器人障碍物边缘连线夹角大小对机器人避障的影响,基于安全避障需要,采用设置膨胀角方法来进行避障控制。设机器人传感器探测到某障碍物的角度范围
。考虑机器人运动方向与机器人障碍物边缘连线夹角大小对机器人避障的影响,基于安全避障需要,采用设置膨胀角方法来进行避障控制。设机器人传感器探测到某障碍物的角度范围 ,对应的感测距离分别为
,对应的感测距离分别为 和
和 。为避免与该障碍物碰撞,在障碍物两侧分别进行机器人半径大小的膨胀,膨胀角度分别为
。为避免与该障碍物碰撞,在障碍物两侧分别进行机器人半径大小的膨胀,膨胀角度分别为 和
和 ,且
,且 ,
, ,则机器人
,则机器人![]() 的不可行区域
的不可行区域 可表示为
可表示为 ,如图5和图6所示。
,如图5和图6所示。
则机器人为避开障碍物需要旋转的角度记为 ,
, 为给定的一
为给定的一
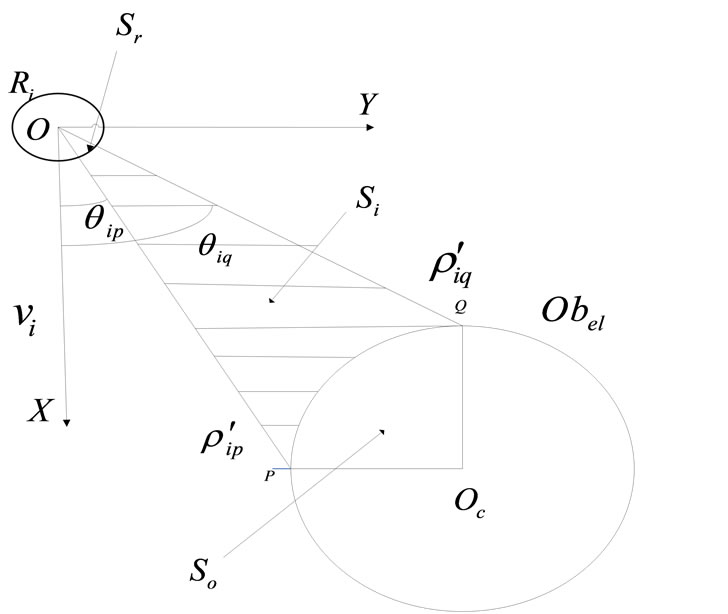
Figure 4. The area sensed through circle-like obstacle
图4. 椭圆形障碍物探测区域面积

Figure 5. An angle offset to avoid a square-like obstacle
图5. 机器人避开椭圆形类障碍物偏转角度

Figure 6. An angle offset to avoid a circle-like obstacle
图6. 机器人避开矩形障碍物偏移角度
正安全膨胀角度。则适应度分量 定义为
定义为
![]() (15)
(15)
其中,当 ,表示机器人
,表示机器人![]() 的运动方向在不可行区域
的运动方向在不可行区域 内,反之当
内,反之当 时表示机器人
时表示机器人![]() 的运动方向在可行区域内,
的运动方向在可行区域内, 为权重系数。由上分析,确定机器人
为权重系数。由上分析,确定机器人![]() 的改进适应度函数
的改进适应度函数 为
为
 (16)
(16)
综上所述,由
 (17)
(17)
来确定相对最优机器人 。根据粒子群优化思想,当前机器人
。根据粒子群优化思想,当前机器人 在下一时刻利用感知范围内相对最优机器人
在下一时刻利用感知范围内相对最优机器人 信息用来对其位置和速度进行更新。
信息用来对其位置和速度进行更新。
4. 目标一致性控制
设某机器人在未知环境中运动时,通过其传感器搜索感知周围最优机器人,利用粒子群优化的思想,将该最优机器人的位置信息和速度方向信息用来更新当前机器人运动状态和位置信息。设在全局坐标系 中,当前时刻
中,当前时刻 ,当前机器人
,当前机器人 的位置为
的位置为 ,速度为
,速度为 ,并设其感测到的周围机器人有
,并设其感测到的周围机器人有![]() ,
, 。
。
不妨设,当前时刻 机器人
机器人 的邻近最优机器人为
的邻近最优机器人为 ,其位置为
,其位置为 ,速度为
,速度为 ,由(17)式,运用改进的粒子群优化策略,则有
,由(17)式,运用改进的粒子群优化策略,则有
 (18)
(18)
其中, 为惯性权重,
为惯性权重, 和
和 为加速度常数。
为加速度常数。
5. 实验仿真
利用改进的粒子群优化算法进行多机器人系统的目标一致性运动控制。设多机器人个数为5,机器人初始运动速度为0.3,机器人半径为2,传感器探测最远有效距离为 。取
。取 ,
, ,
, ,
,![]() ,
, ,
, 。采用以上改进的粒子群优化算法的多机器人系统目标一致性运动控制,如图7所示,多机器人从初始状态向共同目标点位置运动,经过441步到达目标点。
。采用以上改进的粒子群优化算法的多机器人系统目标一致性运动控制,如图7所示,多机器人从初始状态向共同目标点位置运动,经过441步到达目标点。
6. 总结
通过利用机器人运动目标信息、周围环境信息、

Figure 7. Motion of destination consensus of multi-robots
图7. 多机器人目标一致性运动
机器人运动信息来定义三个适应度分量,提出了改进的粒子群优化策略。针对未知环境中障碍物的形状、位置等未知情形,通过机器人自身传感器获取环境信息,采用最小二乘方法对运行环境中两类障碍物进行拟合估计,提高机器人对环境的感知识别能力。利用粒子群优化的思想,将感知范围内的最优机器人位置和速度信息用来更新当前机器人运动状态和位置。实现了多机器人系统的目标一致性运动控制。
参考文献 (References)
[1] Savkin, A.V. and Teimoori, H. (2010) Decentralized navigation of groups of wheeled mobile robots with limited communication, IEEE Transactions on Robotics, 26, 1099-1104.
[2] Hou, S.P. and Cheah. C.C. (2012) Dynamic compound shape control of robot swarm. IET Control Theory and Application, 6, 454-460.
[3] Cucker, F. and Dong, J. (2010) Avoiding collisions in flocks. IEEE Transactions on Automatic Control, 55, 1239-1241.
[4] Tian, Y.P. and Liu. C.L. (2008) Consensus of multi-agent systems with diverse input and communication delays. IEEE Transactions on Automatic Control, 53, 2123-2124.
[5] Cao, H., Chen, J., Mao, Y.T., et al. (2010) Formation control based on flocking algorithm in multi-agent system. Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, 7-9 July 2010, 2289-2291.
[6] Kennedy, J. and Eberhart, R.C. (1995) Particle swarm optimization. Proceedings of IEEE International conference on Neural Networks, Perth, 27 Nov. 1995-1 Dec. 1995, 1942-1948.
[7] V Tandon, (2001) NC end milling optimization using evolutionary Computation. International Journal of Machine Tools and Manufacture, 42, 595-605.
[8] 高鹰, 姚振坚, 谢胜利 (2006) 基于种群密度的粒子群优化算法. 系统工程与电子技术, 6, 922-924,932.
[9] 胡玉兰, 姜明洋, 赵慧静 (2009) 基于改进粒子群算法的移动机器人路径规划方法研究. 计算机工程与科学, 6, 139-141.
[10] 雷艳敏, 朱齐丹, 冯志彬 (2011) 基于速度障碍和行为动力学的动态路径规划. 华中科技大学学报(自然科学版), 4, 15- 19.
[11] 张涛, 侯媛彬, 史小茹 (2011) 基于改进粒子群算法的消防机器人路径规划. 微计算机信息, 4, 207-209.
[12] 杨月全, 韩飞, 曹志强, 金露 (2013) 基于激光传感器的动态拟合避障控制与仿真. 系统仿真学报, 4, 704-708.
NOTES
*资助信息:国家自然科学基金项目(61175111, 61273352);江苏省高校自然科学研究项目(10KJB510027)。
#通讯作者。