Dynamical Systems and Control
Vol.04 No.03(2015), Article ID:15661,8 pages
10.12677/DSC.2015.43006
Nonlinear Singular Systems with Time-Delay Robust Simultaneous
 Control
Control
Ruijie Li, Jundong Bao
College of Mathematics Science, Inner Mongolia Normal University, Hohhot Inner Mongolia
Email: rjzx1990@163.com, baojd@imnu.edu.cn
Received: Jun. 15th, 2015; accepted: Jul. 8th, 2015; published: Jul. 14th, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
This paper considers the problems of robust simultaneous H-infinity control for nonlinear singular systems with uncertain state time-delay. The stabilization criterion for singular systems is derived by Lyapunov-Krasovskii functional, linear matrix inequality (LMI) and nonlinear uncertain vector function with norm bounded, then the sufficient condition of closed-loop nonlinear singular systems with time-delay is gained to guarantee regular, impulse-free, stable. The H-infinity controller design approach is given for nonlinear uncertain singular closed-loop systems with time-delay and disturbance. Finally, a numerical example is presented to illustrate the feasibility of the proposed results.
Keywords:Nonlinear Singular Systems, Time-Delay, Linear Matrix Inequality, Robust Simultaneous H-Infinity Control

非线性时滞奇异系统的鲁棒同时控制
李瑞杰,包俊东
内蒙古师范大学,数学科学学院,内蒙古 呼和浩特
Email: rjzx1990@163.com, baojd@imnu.edu.cn
收稿日期:2015年6月15日;录用日期:2015年7月8日;发布日期:2015年7月14日

摘 要
针对一组具有不确定性状态非线性的时滞奇异系统鲁棒控制问题进行研究。基于Lyapunov-Krasovskii泛函和线性矩阵不等式(LMI)以及非线性不确定向量函数范数有界的条件下,得到自由奇异系统的稳定性判据,进而有状态反馈控制下闭环非线性时滞奇异系统的正则、无脉冲、稳定的充分条件。给出带有不确定性具有扰动的非线性时滞闭环系统的 控制器的构造方法。最后,给出仿真算例说明本文方法的可行性。
控制器的构造方法。最后,给出仿真算例说明本文方法的可行性。
关键词 :非线性奇异系统,时滞,线性矩阵不等式,鲁棒同时 控制
控制

1. 引言
奇异系统广泛应用在实际系统中,比如:化工、冶金、炼油、航空航天、机械制造等。在复杂工业过程中都会出现时滞现象,时滞的出现使得受控系统处于不稳定状态或者系统性能下降。因此,近年来时滞奇异系统的镇定问题引起了学者的广泛关注,取得了颇多的研究成果。谢湘生,刘永清[1]
在1996年基于 控制,得到时滞奇异系统镇定控制器设计方法,基本上是国内较早研究时滞系统的镇定问题的学者。随后冯俊娥,程兆林在[2]
中利用矩阵不等式(LMI)给出时滞广义系统稳定的充分条件,并讨论了
控制,得到时滞奇异系统镇定控制器设计方法,基本上是国内较早研究时滞系统的镇定问题的学者。随后冯俊娥,程兆林在[2]
中利用矩阵不等式(LMI)给出时滞广义系统稳定的充分条件,并讨论了 状态反馈控制器设计思路,但并没有考虑时滞奇异系统的鲁棒性。系统中信号的传递和观测时间以及系统元件老化的原因,使得鲁棒控制成为研究时滞系统控制问题的重要课题。张冬雯[3]
研究了不确定时滞奇异系统状态反馈的鲁棒
状态反馈控制器设计思路,但并没有考虑时滞奇异系统的鲁棒性。系统中信号的传递和观测时间以及系统元件老化的原因,使得鲁棒控制成为研究时滞系统控制问题的重要课题。张冬雯[3]
研究了不确定时滞奇异系统状态反馈的鲁棒 控制问题,杨帆,张庆灵在文献[4] 中基于神经网络模型,对带有扰动的时滞广义系统鲁棒
控制问题,杨帆,张庆灵在文献[4] 中基于神经网络模型,对带有扰动的时滞广义系统鲁棒 控制进行研究,但是这些成果仅仅是对线性时滞奇异系统的研究,没有涉及到非线性。
控制进行研究,但是这些成果仅仅是对线性时滞奇异系统的研究,没有涉及到非线性。
徐胜元,杨成梧[5] 研究了不确定非线性广义系统的鲁棒控制并没有考虑系统的时滞和 控制。王德进在文献[6] 考虑不确定非线性时滞系统的时滞依赖的鲁棒干扰抑制,基于LMI 得到了状态反馈控制律,且具有鲁棒稳定性和优化的抑制能力。傅勤[7]
等对带有界扰动的一类非线性系统进行状态设计。王岩青,姜长生在文献[8] 对状态为非线性的不确定线性时变时滞系统的状态控制器设计问题就行研究。不足之处是这些学者所得结论非线性时滞奇异系统并不一定适用,王天成[9]
基于Lyapunov-Krasovskii泛函和LMI针对非线性时滞广义系统研究并给出
控制。王德进在文献[6] 考虑不确定非线性时滞系统的时滞依赖的鲁棒干扰抑制,基于LMI 得到了状态反馈控制律,且具有鲁棒稳定性和优化的抑制能力。傅勤[7]
等对带有界扰动的一类非线性系统进行状态设计。王岩青,姜长生在文献[8] 对状态为非线性的不确定线性时变时滞系统的状态控制器设计问题就行研究。不足之处是这些学者所得结论非线性时滞奇异系统并不一定适用,王天成[9]
基于Lyapunov-Krasovskii泛函和LMI针对非线性时滞广义系统研究并给出 控制器的构造方法,然而并没有考虑多个非线性时滞奇异系统的同时
控制器的构造方法,然而并没有考虑多个非线性时滞奇异系统的同时 控制。同时镇定问题首先由Saeks [10] 等人源于实际工程中多模型特征系统稳定的需要首先提出。在国内,曹永岩,孙优贤[11]
[12] 由状态空间的互质分解提出同时镇定问题研究。2011年关强,何冠男[13] 等人在回顾前人同时镇定方法后,对“比利时巧克力问题”,“香槟问题”等进一步探讨分析同时镇定问题。至今,同时镇定问题仍是学者关注的热点领域。
控制。同时镇定问题首先由Saeks [10] 等人源于实际工程中多模型特征系统稳定的需要首先提出。在国内,曹永岩,孙优贤[11]
[12] 由状态空间的互质分解提出同时镇定问题研究。2011年关强,何冠男[13] 等人在回顾前人同时镇定方法后,对“比利时巧克力问题”,“香槟问题”等进一步探讨分析同时镇定问题。至今,同时镇定问题仍是学者关注的热点领域。
本文考虑非线性奇异时滞系统的鲁棒同时 控制问题。系统状态是带有时变的非线性的有界范数,基于基于Lyapunov-Krasovskii泛函和线性矩阵不等式(LMI),分别得到自由奇异系统的稳定性判据,状态反馈控制下闭环非线性时滞奇异系统的正则、无脉冲、稳定的充分条件,给出在带有不确定性具有扰动的非线性时滞系统的
控制问题。系统状态是带有时变的非线性的有界范数,基于基于Lyapunov-Krasovskii泛函和线性矩阵不等式(LMI),分别得到自由奇异系统的稳定性判据,状态反馈控制下闭环非线性时滞奇异系统的正则、无脉冲、稳定的充分条件,给出在带有不确定性具有扰动的非线性时滞系统的 控制器的构造方法,所得结论是一组严格的矩阵不等式形式,利用matlab
toolbox可以运行可行解。
控制器的构造方法,所得结论是一组严格的矩阵不等式形式,利用matlab
toolbox可以运行可行解。
2. 问题描述
考虑如下状态非线性不确性的广义时滞系统:
 (1)
(1)
其中 为系统状态向量,
为系统状态向量, 为系统控制输入,
为系统控制输入, 是有限能量的外部扰动输入,即
是有限能量的外部扰动输入,即 ,
, 是被调输出,
是被调输出, 是奇异阵,不失一般性,我们假设
是奇异阵,不失一般性,我们假设 。
。 ,
, ,
, ,
, 为已知的适维常数阵,
为已知的适维常数阵, 为变时滞,满足:
为变时滞,满足: ,
, ,
, 表示系统的连续的初始状态,
表示系统的连续的初始状态, ,
, 连续可微的向量函数,且满足如下范数有界条件:
连续可微的向量函数,且满足如下范数有界条件:
 (2)
(2)
 (3)
(3)
令系统(1)中 ,
, 得到自由系统
得到自由系统
 (4)
(4)
假设自由系统(4)正则、无脉冲,在满足(2),(3)式以及初始条件下有解。事实上,若 ,
, ,
, ,即
,即 是自由系统的平衡点。
是自由系统的平衡点。
本文的目的是设计状态反馈
 (5)
(5)
其中 为反馈增益阵。
为反馈增益阵。
使得系统(1)的闭环系统:
 (6)
(6)
对满足(2),(3)式的所有 ,
,
 满足:
满足:
(1) 时闭环系统(6)正则、无脉冲、稳定。
时闭环系统(6)正则、无脉冲、稳定。
(2) 在零初始状态 下,对任意的
下,对任意的 ,
, 有:
有:

引理1 [14] :奇异系统
的解是正则、无脉冲,当且仅当存在矩阵 满足
满足

引理2 [15] :对于任意矩阵 ,
, 和对称正定矩阵
和对称正定矩阵 ,有以下不等式成立:
,有以下不等式成立:

引理3 [16] :设 正则、无脉冲,则存在可逆阵
正则、无脉冲,则存在可逆阵 ,
, ,使得下式成立:
,使得下式成立:
3. 稳定性分析
为了研究方便,首先考虑自由系统(4)的稳定性。
定理1:如果存在适当正数 ,
,
 ,正定对称矩阵
,正定对称矩阵 ,
, 有如下线性矩阵不等式成立:
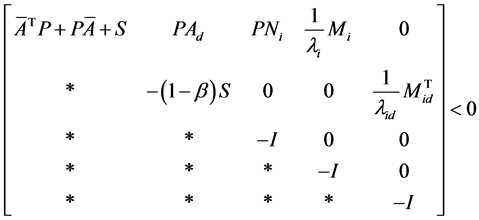
有如下线性矩阵不等式成立:
 (7)
(7)
 (8)
(8)
其中 ,则自由系统(4)渐近稳定。
,则自由系统(4)渐近稳定。
证明:由(8)式利用schur补引理可得:

由 ,
, ,由引理2知:
,由引理2知:
 (9)
(9)
式(9)结合(7)式由引理1可得:矩阵对 正则、无脉冲,自由系统(4)有解。
正则、无脉冲,自由系统(4)有解。
取候选的Lyapunov-Krasovskii泛函:
 (10)
(10)
由于矩阵 ,
, 对称正定,且有式(2),(3)成立,则
对称正定,且有式(2),(3)成立,则 正定。
正定。
 沿着自由系统(4)对
沿着自由系统(4)对 求导:
求导:
其中 ,
则上式可等价于下式:
,
则上式可等价于下式:

其中
 (11)
(11)
如果 ,则有
,则有 即是
即是 负定。由稳定性定理知:自由系统(4)渐近稳定。由schur补引理知:式(11)与式(8)等价,定理证毕。
负定。由稳定性定理知:自由系统(4)渐近稳定。由schur补引理知:式(11)与式(8)等价,定理证毕。
下面考虑系统(1)在状态反馈下的闭环系统(6)的稳定性。
推论:如果存在适当正数 ,
,
 ,正定对称矩阵
,正定对称矩阵 ,
, 和适当维数的矩阵
和适当维数的矩阵 有如下线性矩阵不等式成立:
有如下线性矩阵不等式成立:

则闭环系统(6)是渐近稳定的。
证明:由定理1结论可知:若下面矩阵不等式

表
成立,则闭环系统(6)渐近稳定,证毕。
最后考虑非线性奇异时滞闭环系统(6)的 性能。
性能。
4. 性能分析
性能分析
定理2:如果存在适当正数 ,
,
 ,正定对称矩阵
,正定对称矩阵 ,
,
 ,
, ,
, 和适当维数的矩阵
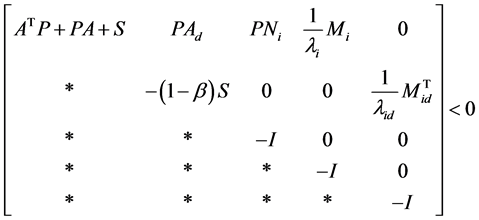
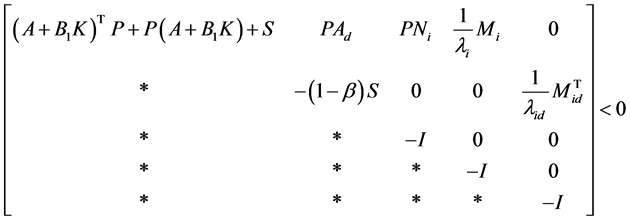
和适当维数的矩阵 ,使得下列线性矩阵不等式成立:
,使得下列线性矩阵不等式成立:
 (12)
(12)
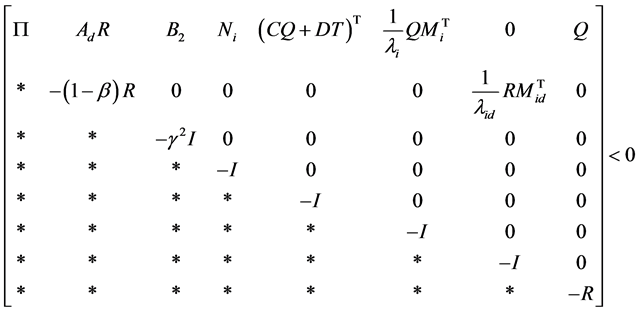 (13)
(13)
其中

则非线性奇异时滞闭环系统(6)满足 性能,此时状态反馈增益阵为
性能,此时状态反馈增益阵为

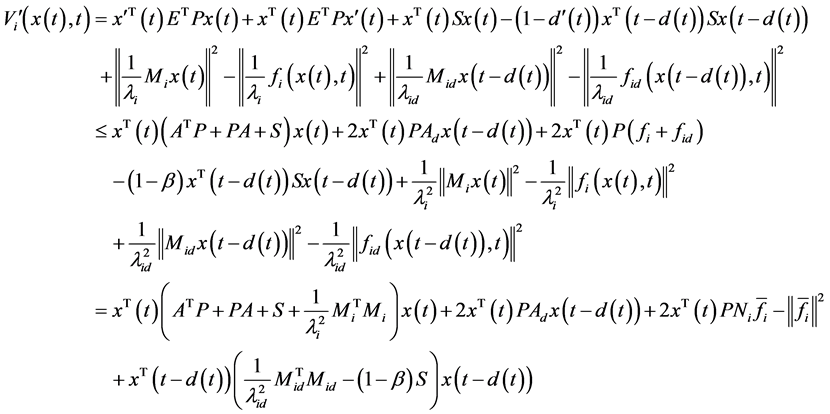
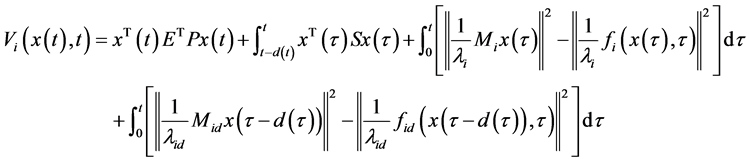
证明:取候选的Lyapunov-Krasovskii泛函:
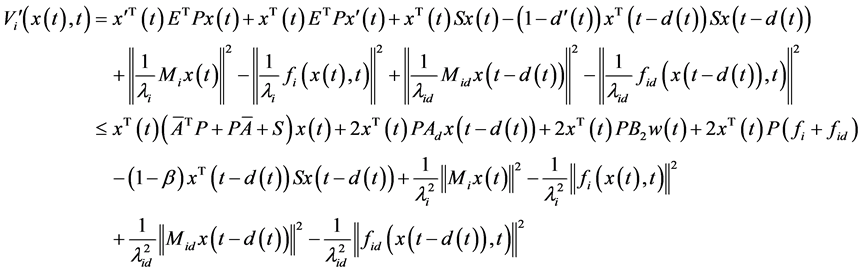
沿着闭环系统(6)对时间 求导,可得:
求导,可得:
 (14)
(14)
下证在零初始条件下,系统(6)具有 性能指标
性能指标 。
。
定义指标函数:
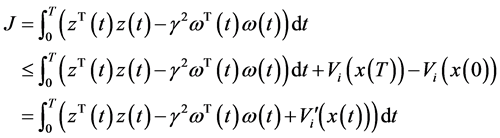 (15)
(15)
由 ,结合(14)式,代入(15)式可得:
,结合(14)式,代入(15)式可得:

其中
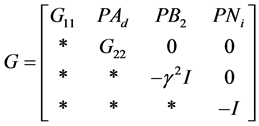
表 ,
, ,
, ,
,
若 ,则有
,则有 ,即
,即 成立,闭环系统(6)满足
成立,闭环系统(6)满足 性能。
性能。
由schur补引理容易证明, 等价于下面矩阵不等式成立:
等价于下面矩阵不等式成立:
 (16)
(16)
对(16)式左边的矩阵左,右乘 可以得到:
可以得到:
 (17)
(17)
令 ,
, ,
, ,再次利用schur引理,(17)式可以化成(13)式,定理证毕。
,再次利用schur引理,(17)式可以化成(13)式,定理证毕。
5. 仿真算例
考虑状态非线性的时滞奇异系统(1),相关参数如下:

 ,
, ,
, ,
,
 ,
, ,
, ,
,
 ,
, ,
, ,
, ,
, ,
, ,
, ,
,
取 ,
, ,
, ,
,
 ,
, ,
, ,求解定理2中矩阵不等式(13)得到:
,求解定理2中矩阵不等式(13)得到: ,
, ,
, ,此时控制器为
,此时控制器为 。
。
6. 结语
本文考虑非线性奇异时滞系统的鲁棒同时 控制问题。基于Lyapunov-Krasovskii泛函和线性矩阵不等式(LMI)以及非线性向量函数的有界范数给出带有不确定性具有扰动的非线性时滞系统的
控制问题。基于Lyapunov-Krasovskii泛函和线性矩阵不等式(LMI)以及非线性向量函数的有界范数给出带有不确定性具有扰动的非线性时滞系统的 控制器的构造方法,所得结论是一组严格的矩阵不等式形式,利用matlab
toolbox运行可行解。最后给出算例说明本方法的可行性。
控制器的构造方法,所得结论是一组严格的矩阵不等式形式,利用matlab
toolbox运行可行解。最后给出算例说明本方法的可行性。
基金项目
内蒙古师范大学十百千人才资助项目;内蒙古师范大学2014年度研究生科研创新基金(CXJJS14054)。
致谢
感谢内蒙古师范大学十百千人才资助项目,内蒙古师范大学2014年度研究生科研创新基金项目的资助!感谢我的恩师包俊东教授亲切的关心和悉心的指导!感谢杨帆,张庆灵,王岩青,姜长生,孙优贤等学者的文章提供了思路!
文章引用
李瑞杰,包俊东, (2015) 非线性时滞奇异系统的鲁棒同时H∞控制
Nonlinear Singular Systems with Time-Delay Robust Simultaneous H∞
Control. 动力系统与控制,03,45-53. doi: 10.12677/DSC.2015.43006
参考文献 (References)
- 1 . Xie, X.S. and Liu, Y.Q. (1996) On stabilization of linear singular systems with time delay. Journal of South China University of Technology (Natural Science), 24, 38-43.
- 2. 冯俊娥, 程兆林 (2003) 线性广义时滞系统的 状态反馈控制器. 控制与决策, 3, 159-163.
- 3. 张冬雯, 王春红 (2006) 时滞不确定奇异系统的鲁棒 控制. 电机与控制学报, 5, 537-540.
- 4. 杨帆, 张庆灵 (2006) 基于神经网络的时滞广义系统的鲁棒 控制. 控制工程, 3, 324-326.
- 5. 徐胜元, 杨成梧 (2000) 一类不确定性广义非线性系统的鲁棒控制. 控制理论与应用, 4, 624-625.
- 6. 王德进 (2004) 一类非线性不确定非线性时滞系统的时滞依赖鲁棒控制. 控制与决策, 6, 675-679.
- 7. 傅勤, 曲文波, 杨成梧 (2007) 带有界扰动的一类非线性系统系统的鲁棒控制. 自动化学报, 11, 1209-1210.
- 8. 王岩青, 姜长生 (2005) 一类非线性不确定时滞系统的鲁棒 控制. 信息与控制, 2, 147-151.
- 9. 王天成, 高在瑞 (2009) 一类不确定非线性广义时滞系统的 控制. 控制工程, 5, 614-617.
- 10 . Saeks, R. and Murray, J. (1982) Fractional representation, algebraic geometry, and the simultaneous stabilization problem. IEEE Transactions On Automatic Control, 27, 895-903. http://dx.doi.org/10.1109/TAC.1982.1103005
- 11. 曹永岩, 孙优贤 (1998) 同时镇定问题研究. 信息与控制, 3, 161-166.
- 12. Cao, Y.Y., Sun, Y.X. and Lam, J. (1999) Simultaneous stabilization via static output feedback and state feedback. IEEE Transactions On Automatic Control, 44, 1277-1282
- 13. 关强, 何冠生, 王龙, 郁文生 (2011) 线性系统的同时镇定问题. 控制理论与应用, 1, 1-10.
- 14. Masubuchi, I., Suda, N. and Ohara, A. (1998) LMI-Based controller synthesis: A unified formulation and solution. International Journal of Robust and Nonlinear Control, 8, 669-686. http://dx.doi.org /10.1002/(SICI)1099-1239(19980715)8:8<669::AID-RNC337>3.0.CO;2-W
- 15. Xie, L. and De Souza, C.E. (1990) Robust control for linear time-invariant systems with norm-bounded uncertainty in the input matrix. Systems & Control Letters, 14, 389-396. http://dx.doi.org /10.1016/0167-6911(90)90088-C
- 16. Dai, L. (1989) Singular control systems. Springer-Verlag, Berlin. http://dx.doi.org/10.1007/BFb0002475