Open Journal of Transportation Technologies
Vol.06 No.01(2017), Article ID:19469,7
pages
10.12677/OJTT.2017.61002
Primary Exploration for Narrow Channels Autopilot System
Yu Jiang, Chengcheng Chang*, Qingyun Chen, Yanping Zheng
College of Automobile & Traffic Engineering, Nanjing Forestry University, Nanjing Jiangsu

Received: Dec. 19th, 2016; accepted: Jan. 2nd, 2017; published: Jan. 5th, 2017
Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
In narrow roads, as part of drivers for poor driving technology will be difficult to drive through the road safely, therefore this paper puts forward the narrow channels autopilot design vision. Paper first introduces the self-driving car environment perception system for narrow channels, focusing on three kinds of schemes for narrow channels, and combines with preview-follower theory included in lateral control strategy and the combined module which is in the longitudinal control strategy. This paper introduces the narrow channel autopilot system in theory preliminarily.
Keywords:Automatic Driving, Environmental Awareness, Route Planning, The Control Strategy

窄道自动驾驶系统初探
江毓,昌诚程*,陈青云,郑燕萍
南京林业大学汽车与交通工工程学院,江苏 南京

收稿日期:2016年12月19日;录用日期:2017年1月2日;发布日期:2017年1月5日

摘 要
在狭窄路况下,部分驾驶者因驾驶技术差会出现难于安全通过的问题,因此本论文提出窄道自动驾驶设计构想。论文首先介绍适用于窄道自动驾驶的车载环境感知系统,重点针对三种窄道情况提出路径规划方案,并结合横向控制策略中的预瞄跟随理论和纵向控制策略中的多模块组合思想,从理论上初探了窄道自动驾驶系统。
关键词 :自动驾驶,环境感知,路线规划,控制策略

1. 引言
随着经济的发展,汽车已经成为人们生活出行必不可少的部分。与此同时,计算机技术的进步让汽车不仅逐步脱胎于纯粹的代步工具,汽车的智能化发展为驾驶员对汽车的操控提供了巨大的便利。诸如自动泊车、坡道辅助、并线辅助、车辆偏离预警系统等高科技装备已经在汽车上得到运用。同时由于汽车保有量的快速增加,路况变得越来越复杂,使得驾驶难度增大。为解决各式各样的驾驶难题,各种智能驾驶系统的研究势在必行 [1] 。
本论文以狭窄通道为驾驶环境,针对车辆在通过狭窄通道时,驾驶员不能准确判断车辆与道路的相对位置,从而难于保证正确的安全行驶路线情况,提出了计算机辅助控制的车辆自动驾驶解决方案。
2. 自动驾驶系统的设计思路
控制流程图如图1所示。
根据车载传感器感知车辆周围环境,获取道路、车辆位置和障碍物等一系列信息。计算狭窄道路的宽度,并与车宽相比较,判断车辆是否可以顺利地通过窄道。如果无法通过则给驾驶员示警,如果可以通过则根据相关的信息生成汽车的行驶轨迹,并通过智能控制保证汽车按既定的轨迹行驶,使汽车顺利通过狭窄道路 [2] 。

Figure 1. Control flow chart
图1. 控制流程图
3. 环境感知系统
窄道自动驾驶系统所处环境相对于其他安全辅助系统例如自动泊车系统而言较为复杂,要求传感器具有高精度,实时性好,失真度小等特点,因此单一传感器已不能满足本系统的要求,所以本系统采用激光雷达传感器和车载高清摄像头相结合的形式来感知环境。
3.1. 激光雷达
激光雷达传感器是由发射单元、接收单元、信息处理单元和旋转台等组成。发射单元将电脉冲转化为光脉冲发射出去,再经由目标反射,接收单元将反射回来的光脉冲转化为电脉冲,信息处理单元通过发射脉冲到接收脉冲的时间差,可计算传感器与物体之间的距离信息 [3] 。
3.2. 车载高清摄像头
目前在绝大多数无人驾驶的智能汽车上都装备了车载摄像头,它可以便捷地获取车辆周围的道路情况,准确地分辨出障碍物类型。车载高清摄像头主要由图像采集系统、处理系统等组成。摄像头采集到的图像经由一系列算法,可以提取出图像的特征值,为障碍物的检测做出前期的准备 [4] 。
3.3. 激光雷达与车载高清摄像头的数据融合
由于窄道自动驾驶系统的环境感知系统由激光雷达传感器和车载高清摄像头组成,所以系统采集的数据具有多样性和不统一性。为了消除传感器之间的数据干涉,必须在一定的准则下将采集到的数据在空间和时间上进行统一,这样系统能更高效的运算数据,提高系统的抗干扰能力,使系统精度和可靠性达到预期目标。
目前数据融合的方法有两大类,第一类是经典方法例如加权平均法、极大似然估计法、卡尔曼滤波法、品质因数法等,第二类是现代方法例如聚类分析、模糊逻辑、神经网络等方法,但现代方法大都需要对大量的数据进行处理,计算复杂,消耗资源较多 [3] 。而加权平均法是方便快捷的数据融合方法且计算精度和实时性都满足要求。
4. 车身参数以及转向时行驶轨迹特性
以常见的前轮转向为例,假设整车轴距b,前悬长度a,轮距为c,内侧车轮转向角为β,汽车左前角与转向中心的连线和和后轴延长线的夹角为α。
如图2示,汽车在转向时所需的宽度大于车身实际宽度c,其数值计算如公式(1):
 (1)
(1)
其中 。
。
汽车的后轴中点的转向半径与转向时所需宽度的关系如公式(2):
 。 (2)
。 (2)
5. 窄道路况分类与行驶路径规划
汽车当前行驶所在道路的宽度、即将通过的窄道的宽度 以及整车的轮距尺寸是研究狭窄通道自动控制策略的重要参数。基于汽车的行驶轨迹特性,将窄道分为平行窄道与垂直窄道分为三种情况进行讨论。
以及整车的轮距尺寸是研究狭窄通道自动控制策略的重要参数。基于汽车的行驶轨迹特性,将窄道分为平行窄道与垂直窄道分为三种情况进行讨论。
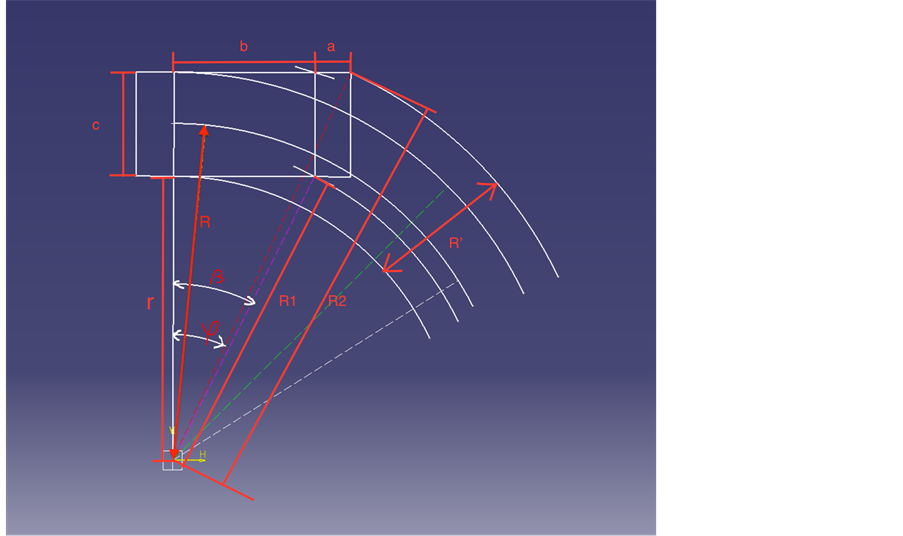
Figure 2. Car moving trajectory characteristic
图2. 汽车行驶轨迹特性
5.1. 平行窄道
为了方便研究,取汽车后轴中点为参考点来分析并制定窄道通行路线。
平行窄道是道路上比较常见的窄道形式,当窄道宽度 时则判定汽车可以通过如图3所示,其路径由直线和曲线组成。因此选取平行于窄道且与道路内侧距离为
时则判定汽车可以通过如图3所示,其路径由直线和曲线组成。因此选取平行于窄道且与道路内侧距离为
 。 (3)
。 (3)
5.2. 垂直窄道
垂直窄道的路径规划基于汽车在转向时的轨迹特性。即当汽车通过转向进入垂直窄道时,转向时实际宽度 需小于窄道宽度
需小于窄道宽度 。
。
取B点距窄道特征D点
 且过B点的窄道特征圆。根据汽车当前位置的不同,将路径规划再分为两种情况。
且过B点的窄道特征圆。根据汽车当前位置的不同,将路径规划再分为两种情况。
当汽车当前行驶轨迹延长线不与特征圆相交时,如图4(a)所示,作半径 且与汽车当前行驶轨迹线和相切于点A和点B的圆。汽车从当前位置开始抵达A点然后以
且与汽车当前行驶轨迹线和相切于点A和点B的圆。汽车从当前位置开始抵达A点然后以 为转向半径抵达B点。
为转向半径抵达B点。
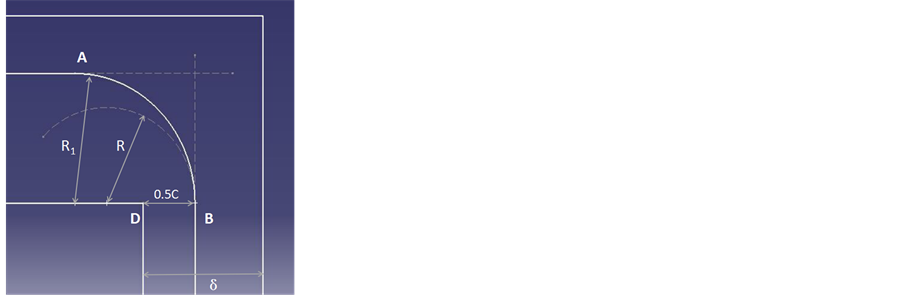
当汽车当前行驶轨迹延长线与特征圆相交时,如图4(b)所示,作平行于汽车当前行驶轨迹线的直线与特征圆相切于点A。汽车的行驶路径可以分为两部分,首先从当前位置点B出发并入直线AA’,方式可以参考平行窄道的路径。然后前进至点A,之后以R为转向半径抵达B点。
在这种情况下当点A距道路一侧距离 ,系统将判定该窄道无法通过,并给与驾驶员以提示。
,系统将判定该窄道无法通过,并给与驾驶员以提示。

Figure 3. Parallel to the narrow path planning
图3. 平行窄道路径规划
 (a) (b)
(a) (b)
Figure 4. Vertical narrow path planning
图4. 垂直窄道路径规划
6. 控制策略的设计
6.1. 横向控制策略
窄道自动驾驶系统所采用的横向控制策略是基于预瞄–跟随控制方法 [5] 。在车辆行进的同时,系统将在规划路径上找出一个符合要求的预瞄点,称之为期望预瞄点,然后将在实时位置和期望预瞄点之间算出一个最优的转弯半径,并根据车辆转向系统的转向特性确定方向盘转角。当车辆行进至期望预瞄点后,再重复之前步骤直至到达路线终点。所以期望预瞄点的选定和转向轮的转向角度的确定是本系统的关键 [6] 。
6.1.1. 期望预瞄点的选定
系统将所规划路径等分成n段(如图5所示),由传感器的测量范围确定最大感知角为γ,并且规定最小的距离d’以保证转弯半径大于车辆的最小转弯半径 [7] 。
选取期望预瞄点的规则如下:
1) 预瞄点应落在最大感知角 之内;
之内;
2) 车辆与预瞄点的距离应该大于最小距离d’,即d > d’;
3) 若同时满足1)和2),则该点为期望预瞄点,否则选取下一个预瞄点进行判断。
图中A是车辆的实时位置。B点是选定后的期望预瞄点。紫色曲线是车辆行驶的规划路径。d表示车辆的实际位置与期望预瞄点B之间的距离。m表示期望预瞄点B与车辆实时位置的横向偏差。绿色圆
Figure 5. Aiming point selected schematic expectations
图5. 期望预瞄点选定示意图
弧曲线是实际位置与期望预瞄点B之间的最佳圆弧。R表示最佳圆弧的半径。α是表示车辆当前的航向角。β表示车辆到期望预瞄点之间的航向角。
6.1.2. 转向轮转角的确定
要得出方向盘的转角,首先要算出车辆的实时位置A与期望预瞄点B之间存在的最优圆弧的半径。如图5示,已知车辆的航向角α、实时位置A与期望预瞄点B之间的航向角β以及实时位置A与期望预瞄点B之间的距离d,则具有以下等式:

化简得:
 (4)
(4)
而方向盘转角与车辆的转弯半径之间存在一定的对应关系,可以近似用
 (5)
(5)
来表示。
因此可以通过对电动转向控制来实现车辆方向的转变,达到横向控制的目的。
6.2. 纵向控制策略
本系统采用基于萨里迪斯三级控制构架的纵向控制模块体系结构(图6),详见文献,文献中通过协调控制汽车的油门踏板和制动踏板,从而达到车辆在预定速下行驶。因文献 [6] 针对纵向控制模块进行了详细论证,故本文在此不赘述。
7. 总结
自动驾驶技术是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标,其中感知道路环境和控制车辆按预定路径行驶的技术已经比较成熟,但是本文介绍的窄道自动驾驶环境并
Figure 6. Longitudinal control module system requirements
图6. 纵向控制模块体系要求
未见文献报道和实际运用,所以本系统的运用环境具有一定的创新性,对于以后自动驾驶方面的探究有较新的理论指导意义。因此,本系统以实现窄道自动驾驶为目标,重点分析了三种路况下的不同路径规划,并在横向控制策略上运用了预瞄–跟随控制方法,结合多模块控制下的纵向控制策略,对窄道自动驾驶系统的结构体系和理论原理进行了初探。
文章引用
江 毓,昌诚程,陈青云,郑燕萍. 窄道自动驾驶系统初探
Primary Exploration for Narrow Channels Autopilot System[J]. 交通技术, 2017, 06(01): 10-16. http://dx.doi.org/10.12677/OJTT.2017.61002
参考文献 (References)
- 1. 辛煜. 无人驾驶车辆运动障碍物检测、预测和避撞方法研究[D]: [博士学位论文]. 合肥: 中国科学技术大学, 2014.
- 2. 李建峰. 汽车自动泊车系统的控制策略和算法研究[D]: [硕士学位论文]. 成都: 西南交通大学, 2010.
- 3. 张双喜. 基于雷达与相机的无人驾驶智能车障碍物检测技术研究[D]: [硕士学位论文]. 西安: 长安大学, 2013.
- 4. 万忠涛. 基于激光雷达的道路与障碍检测研究[D]: [硕士学位论文]. 北京: 国防科学技术大学, 2010.
- 5. 赵熙俊, 陈慧岩. 智能车辆路径跟踪横向控制方法的研究[J]. 汽车工程, 2011, 33(5): 383-387.
- 6. 张卫忠. 基于仿人智能控制的无人地面车辆自动驾驶系统研究[D]: [博士学位论文]. 合肥: 中国科学技术大学, 2014.
- 7. 史晓磊. 基于激光雷达的自动泊车系统研究[D]: [硕士学位论文]. 上海: 上海交通大学, 2010.
NOTES
*通讯作者。