Geomatics Science and Technology
Vol.2 No.03(2014), Article ID:13834,5 pages
DOI:10.12677/GST.2014.23006
Study on a New Method for Typical Deformation Monitoring Projects and Its Applications
Guangdong Nonferrous Metals Engineering Investigation Design Institute, Guangzhou
Email: 416854154@qq.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Jun. 20th, 2014; revised: Jul. 10th, 2014; accepted: Jul. 15th, 2014
According to the actual situation of high-formwork engineering and large deformation monitoring in Guangzhou subway, this paper studies the new method of monitoring based on measuring the deformation of a robot, that is a mixed base-point network method and multi-point & compulsory free-station linear-angular intersection method, and it was successfully applied to a number of typical projects. Practice has proved that the method is both simple with high degree automation. At the same time, monitoring accuracy can meet the requirements of a variety of typical deformation warning works.
Keywords:Georobot, Mixed Base-Point Network, Multipoint Compulsory Free Station, Linear-Angular Intersection Method, Automated Deformation Measurement System

梁龙昌,卢松耀,卢凌燕
广东有色工程勘察设计院,广州
Email: 416854154@qq.com
收稿日期:2014年6月20日;修回日期:2014年7月10日;录用日期:2014年7月15日

针对广州城市地铁、高支模工程和大型基坑变形监测实际,本文研究总结了一种基于测量机器人的变形监测新方法,即混合基点网法和多点强制自由设站边角交会法,并成功应用于多个典型工程。实践证明,该方法简单易行,自动化程度高,监测精度可满足多种典型工程的变形预警要求。
测量机器人,混合基点网,多点强制自由设站,边角交会法,自动化变形测量系统

在许多工程建设中,为了给设计提供反馈信息,如了解施工工艺和施工参数是否符合预期要求,看设计是否优质安全、经济合理;同时,也为了保证施工快捷、安全,施工对周边环境安全的影响,需要进行变形监测预警。变形监测包括基准网布设,变形体水平位移和垂直位移(沉降)监测,以及可能影响施工安全的水位、应力、应变监测。本文结合广州城市地铁、高支模工程和大型基坑变形监测实际,研究总结了基于测量机器人的变形监测新方法,即混合基点网法和多点强制自由设站边角交会法,并成功应用于多个典型工程。实践证明,该方法简单易行,自动化程度高,监测精度可满足多种典型工程的变形预警要求。
工程变形监测一般需要建立监测基准和布设监测站和监测点,所以涉及基准点、工作基点和监测点的布设(参见[1] )。基准网布设新方法包括以下两种网的情况:一是基准点网设计,即将把所有基准点纳人一个网,称为单纯基准点网,最好由3个以上基准点构成。根据情况,可采用GNSS技术建立,也可用测量机器人(Georobot)技术建立,最好是将两种技术相结合。如对地上的工程,多采用GNSS技术,地下工程则只能采用测量机器人技术。如图1所示的基准点网,由5个基准点组成,主要采用GNSS技术建立,每一个点上基本观测3~4条以上的GNSS独立基线,用GRT观测可通视地面边。在基准点网基础上,布设工作基点和监测点,这是一种常用的方案,在此不作详述。本文主要讨论一种新型的混合基点
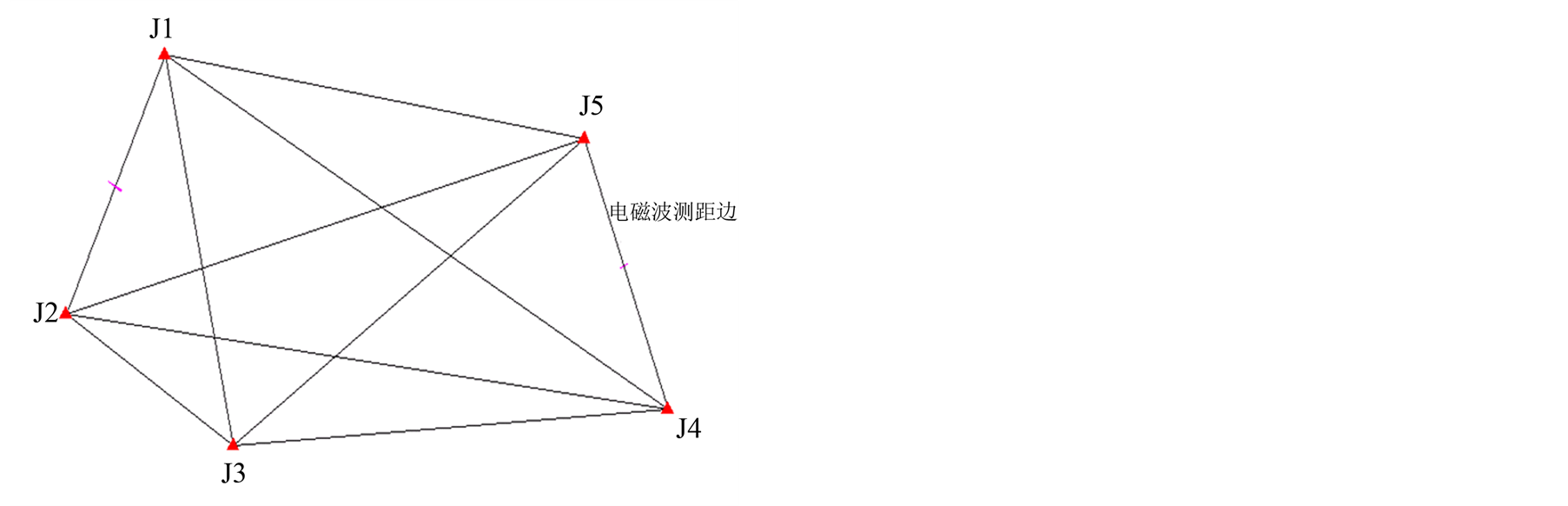
Figure 1. Schematic diagram of datum point network (established by 2G method)
图1. 单纯基准点网示意图(2G方法建立)
网,该网由基准点和工作基准点组成,基准点设在变形区外稳固、不易破坏的地方,但在基准点上不设测站,其上要安置照准标志(如棱镜);工作基点有多个,设在便于对基准点和监测点进行观测的任意合适的位置,称为自由设站,在工作基点上,一般要求能观测两个以上的基准点;但一经选点,需要设立稳固的观测设施如强制对中装置,便于架设测量机器人进行测站观测作业。故称多点强制自由设站。如图2所示的混合基点网,由4个基准点和3个工作基点组成。只需在3个工作基点设站观测,就可以完成混合基点网的建立工作。混合基点网采用测量机器人自动化观测,其首期观测十分重要,一般采用多测回、多时段作独立观测和检核测量,在一个假设的坐标系下,固定一点一方向进行严密平差,以获得基准点和工作基点的精确坐标。
对大坝、大桥等工程的变形监测,其监测期较长,基准点间通视条件较好,基准点往往就能直接观测到监测点,用GNSS加Georobot技术(简称2G技术)建立的基准点网精度较高,适合布设单纯基准点网对监测点进行监测;对隧道、高支模和基坑等城市工程的变形监测,由于监测环境复杂且需提供实时变形监测数据,采用测量机器人建立混合基点网,更加简单易行,自动化程度高,监测精度可满足多种典型工程的变形预警要求。
多点指多个工作基点,可以自由选取其点位,一般应选在便于设站和测量的位置,可至少与两个基准点通视,能观测较多的目标点(监测点)。一旦选定,应进行测站整理加固,设置强制观测装置,保证在监测中不至发生变动。在变形体上布设监测点,直接将仪器同时或先后架设在工作基点上。在混合基点网首期观测中,采用边角交会法得到基准点的坐标,在后面各期监测中,采用边角后方交会法得到工作基点的坐标,采用边角前方交会法得到目标点的坐标。在监测中,应以多个基准点进行定向,并作方向、距离检核,进行基准点的稳定性检验,确定是否存在不稳定基准点。可采用“组合后验方差检验法”判断显著变动的基准点,以稳定的基准点为已知点,计算工作基点和变形监测点的坐标(参见[2] )。然后用测量机器人对监测点进行边角自动化观测,尽可能地有多余观测,当监测点只有极坐标法观测时,要通过重复该点坐标的可靠性,对精度要求较高的监测点,应在多个工作基点上作边角前方交会,通过多余观测提高监测点的精度和可靠性。
针对地铁隧道、高支模和大型基坑变形监测项目,对混合基点网布设及监测预警系统应用予以说明。

Figure 2. Schematic diagram of mixed base-point network (Methods Geo-robot, multipoint compulsory free-station linear-angular intersection method)
图2. 混合基准点网示意图(测量机器人建立多点强制自由设站边角交会法)
4.1. 地铁隧道结构变形监测
广州市地铁金穗路集运隧道监测项目位于珠江新城珠江大道东与珠江大道西之间区域,由于该区域有一占地约6.5万平米,深度达13米的开挖基坑,且周边有许多已建和在建的高层建筑,可能引起地铁隧道结构变形,为了确定基坑深开挖和周边高层建筑建设期间因荷载变化对地铁隧道段的影响,为设计施工提供信息服务和安全保障,要求在基坑开挖和施工期对隧道结构进行位移和沉降监测,监测的隧道长度约为410米,在上行线、下行线两个平行隧道段各布设由4个基准点SJ1、SJ2、SJ3、SJ4和两个工作基点SN、SB组成的混合基点网如图3所示,基准点布设在隧道两端稳定地段(参见[3] ),工作基点在变形区内,设强制装置,各有96个和97个监测点(图中的小黑点),采用前述方法进行混合基点网首期观测,以隧道轴线为X轴,按一点一方向做严密平差,用“验后方差检验法”检验显著变动的基准点,以稳定的基准点为已知点计算工作基点和变形监测点的坐标。此项目共进行了为期8个月的监测,监测周期共632期,最多每天测4周期,全部时间约5小时。因为都是采用测量机器人进行移动式自动化监测,简单易行,效率高、经费省。
每天必须进行混合基点网检验和平差,计算出每一期的监测点坐标,进行监测点变形分析,向业主方提交监测报表和报告。
集运隧道的监测结果可归纳为:隧道主体结构随上方基坑开挖施工,有缓慢的上浮趋势;当开挖完成后,上浮越来越小;随着隧道上方基坑工程逐步建成和高层建筑建设,隧道结构有微小下沉,但不显著;至基坑回填时,逐渐趋于稳定。整个监测项目为设计积累了宝贵的资料。
4.2. 永龙工程桥梁高支模监测
该监测项目是为永龙隧道及道路工程中的高支模支撑系统在施工浇注时的变形进行监测,在支撑(架)搭设完成,需要在浇注施工前建立变形监测基准网,浇注过程中对支撑进行变形监测,为甲方提供高支模支撑的实时变形数据,确保支撑系统不会发生失稳现象,监测时间一般持续在20小时左右,每20~30分作一周期监测,浇注结束后一段时间内变形稳定即可结束监测工作,每次要作约30周期监测。项目共要进行68跨桥梁浇注施工,每次施工1~2跨,共进行了60次监测,每次需建立如图4所示的由4个基准点、两个工作基点组成的混合基点网。
整个项目工期6个月,进行了2000多期的监测,成功预报、报警26次,如:监测点沉降大于预警值8 mm有10次,大于控制值10 mm有3次;周期沉降量超过预警值的监测点有9个;周期水平位移量超过预警值的监测点有4个。水平位移累计变形量最大达到7.1 mm(预警值10 mm)。凡大于预报、报警值时均作了及时上报的处理,根据监测数据指示变形部位,监理、施工人员采用措施,如停止浇注施工,排查隐患,同时加密监测,确保了桥梁高支模施工的正常进行和人员安全,给设计提供了宝贵的实时监测数据资料。
4.3. 国际医药港展贸中心基坑监测
广州市国际医药港国际医药展贸中心基坑长528 m、宽265 m,开挖深度14.5 m。采用水泥搅拌桩止

Figure 3. Layout diagram of mixed base-point network in tunnel
图3. 隧道混合基准点网布设示意图
水帷幕加钻孔排桩和预应力锚索的支护方案开挖。具有监测内容多、环境复杂、基坑支护系统安全性稳定性要求高等特点。
由于施工围蔽遮挡及周边环境影响,基准点间相互通视困难,采用了如图5所示的混合基点网。6个基准点(JZ01、JZ02、JZ03、JZ04、JZ05、JZ06)位于基坑外围较为稳定区域,采用深埋法埋设高出地面约130cm的立柱,顶部嵌入强制对中装置,可将棱镜固定其上。6个工作基点(GZ01、GZ02、GZ03、GZ04、GZ05、GZ06)自由选择在变形区便于对监测点(目标点)观测的位置,如基坑四角和边上支护结构的顶部,以观测墩形式埋设,顶部安装强制对中装置;监测点采用小的混泥土墩设在变形体上,墩顶中央嵌入强制对中螺丝,可将徕卡L型小棱镜固定在上面。
首期观测和以后各期观测都在在工作基点上用测量机器人自动化进行(参见[4] ),在某一独立坐标系下,固定一点JZ01的坐标,固定JZ01到JZ04的方向,使监测点的最大位移方向与坐标轴的方向基本一致,如平行基坑长边为Y方向,用科傻软件CODAPS进行严密平差(参见[5] ),可得基准点和工作基点在该独立坐标系下的坐标。在周期观测中,我们采用两台测量机器人,采用极坐标法测量支护结构顶部各监测点的三维坐标,计算出各监测点的位移量、沉降量以及累计位移量、累计沉降量。整个项目从2012年9月15日开始监测,到2014年5月20日地下室底板施工完成,共完成191次监测,发现监测期间基坑稳固、安全,位移、沉降最大累计变形量都不到10 mm,小于40 mm的报警值。其中编号为WY43~WY46
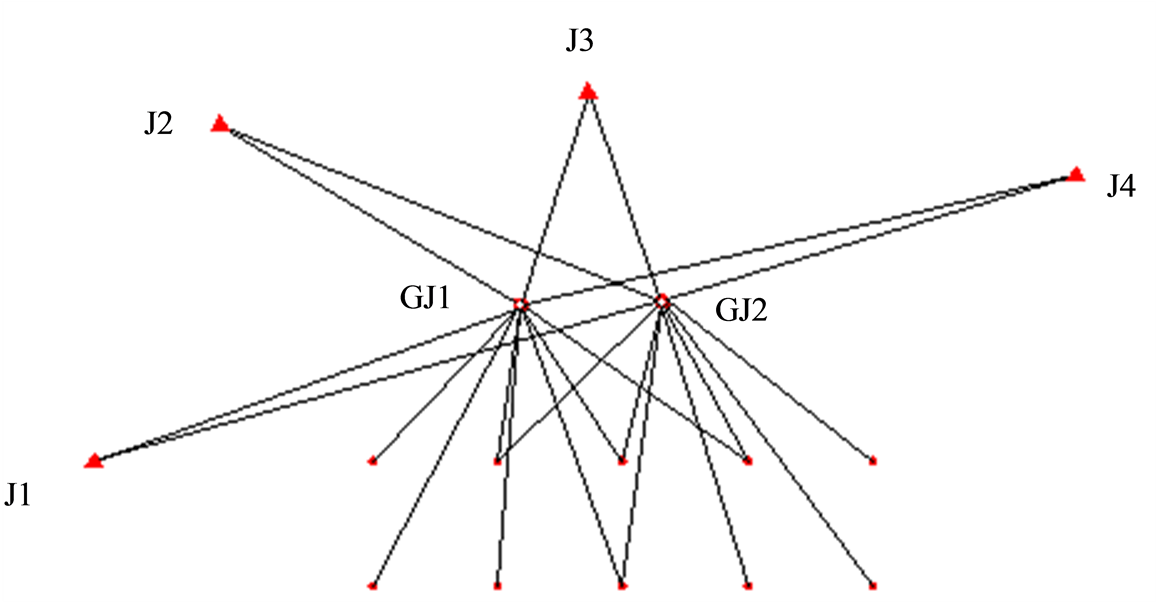
Figure 4. Schematic diagram of mixed base-point network for Yong Long engineering high formwork
图4. 永龙工程高支模混合基点网示意图

Figure 5. Schematic diagram of mixed base-point network in pit
图5. 基坑混合基准网布设示意图
监测点,其水平位移变形过程曲线,第一期到第40期其变形都很小,由于WY44附近支护结构渗水、涌沙原因,附近路面产生塌陷,锚索拉力减弱,地下水位下降过快,在40期以后,累计位移量增大,最大值为9 mm,且呈趋势性变化;第80期采取喷浆、封堵、回填及加固措施后,变形缓慢,变形量在可控范围,随着时间的推进,变形逐渐放慢,对支护结构安全不造成影响。
结合广州城市地铁、高支模工程和大型基坑变形监测实际,本文所研究总结的基于测量机器人的变形监测新方法,即采用测量机器人用多点强制自由设站和边角前方交会法建立混合基点网,进行首期观测,同样在多个工作基点上设站,采用边角后方交会和边角前方交会法进行周期变形观测,可用于多种典型工程,经工程实践证明,该方法简单易行,自动化程度高,监测精度可满足多种典型工程的变形预警要求,具有先进性、实用性、有效性和推广价值。
- [1] 张正禄, 主编 (2013) 工程测量学. 武汉大学出版社, 武汉.
- [2] 张正禄, 沈飞飞, 等 (2011) 地铁隧道变形监测基准网点确定的一种方法. 测绘科学, 4, 98-99
- [3] 梁龙昌, 卢凌燕, 丘志宇 (2014) 广州市珠江新城地铁变形监测预警系统的研究与应用. 测绘科学技术, 2, 9-13.
- [4] 梅文胜, 张正禄 (2002) 测量机器人变形监测软件系统研究. 武汉大学学报(信息科学版), 2, 165-171.
- [5] 张正禄, 罗年学, 等 (2010) COSA_CODAPS及在精密控制测量数据处理中的应用. 测绘信息与工程, 2, 52-54.