Journal of Aerospace Science and Technology
Vol.2 No.04(2014), Article
ID:14466,11
pages
DOI:10.12677/JAST.2014.24008
“Heaven Bridge” Space Transportation System Based on Magnetic Levitation Technology
School of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing
Email: jicongyun@nuaa.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Oct. 30th, 2014; revised: Nov. 15th, 2014; accepted: Nov. 19th, 2014
ABSTRACT
A new concept of the space transportation system is presented, namely “Heaven Bridge” space transportation system. Based on the development of maglev train in our country, this new space transportation system is composed of vacuum magnetic levitation pipeline, flight transportation vehicle, and other equipment on the ground. Combing with the unique geographical advantage, launching spot of “Heaven Bridge” is located at the top of Himalayas Mountain in China. When spacecraft separates from the “Heaven Bridge” system, the spacecraft can be boosted by rocket engines and then reach the appointed target orbit in space at the speed of 7.9 km/s. Comparing with the traditional space transportation systems, this new concept system “Heaven Bridge” provides with the following excellent properties: skyscraping efficiency payloads, reusable and recycling, environmental-friendly, safety transportation and so on.
Keywords:Vacuum Magnetic Levitation, Space Transportation System, Optimal Design, Flight Simulation and Analysis

基于磁悬浮技术的“通天桥”航天运载系统
姬聪云,南 英,闻 新,安 彬,王晓晖,袁 伟,胡欣欣
南京航空航天大学航天学院,南京
Email: jicongyun@nuaa.edu.cn
收稿日期:2014年10月30日;修回日期:2014年11月15日;录用日期:2014年11月19日

摘 要
本文提出一套新型的航天运载系统,即“通天桥”航天运载系统。基于真空磁悬浮原理,结合我国目前磁悬浮列车的技术储备与发展,对真空管道的实现、磁悬浮管道的构建、磁悬浮方式的选择等进行了深入研究。结合我国得天独厚的地理优势,“通天桥”系统中航天器脱离管道地点设置在喜马拉雅山脉的顶峰。当航天飞行器脱离“通天桥”系统之后,采用火箭发动机,最终航天运载器以7.9 km/s的速度进入太空预定轨道。仿真结果表明,与传统航天运载器相比,该“通天桥”航天运载系统在提高航天器的有效载荷率、重复使用性,节能环保和运载安全等方面有独特的优势。
关键词
真空磁悬浮,航天运载系统,方案优化设计,飞行仿真和分析

1. 引言
航天运载系统指往返于地球表面和空间轨道之间以及轨道与轨道之间运载各种有效载荷的运载工具系统的总称,是航天宇航发展的关键技术。纵观当前世界航天运载系统的发展状况,航天运载系统分为一次性使用和可重复使用两种类型,包括载人或货运飞船及其运载火箭、航天飞机、空天飞机、应急救生飞行器、各种辅助系统等。目前世界上主要的航天大国大都采用一次性的航天运载工具,其缺点是发射成本高,有效载荷低、安全系数低、发射难度大等等。美国研究的航天飞机虽然技术上达到了重复利用,但由于发射频率低、重复使用未达到要求以及载人和载货同时进行,安全系数远不及宇宙飞船,因而使得航天飞机的发射费用远高于一次性运载火箭。虽然现在各国现在正在进行例如空天飞机、单级火箭入轨等多种航天运载新技术的研究,但始终停留在以自带燃料,自给自足的模式中,不仅有效载荷低,技术难度高,而且花费巨大。
目前各国都在积极寻求新型的航天运载模式。日本提出“太空电梯”构想,太空电梯的主体是一个永久性连接太空站和地球表面的缆绳,可以用来将人和货物从地面运送到太空站。美国提出真空管道磁悬浮星际列车的概念。用超导缆绳产生的悬浮力将真空磁悬浮悬浮起来,列车在真空管道中加速后直接进入轨道。这两种新概念的航天运载系统虽然有一定的新颖性,但根据现在的航天科技水平,超导电缆使用的安全性和可行性仍在研究之中,相应的技术要求、材料要求也很高。这两套新型航天运载系统的实现难度比较大,可行性还有待讨论。
航天运载系统是现代科学技术的高度综合,集中了现代工程技术的新成就。同时,航天运载系统发展水平代表了一个国家进入宇宙空间的能力,是发展空间技术、开发空间资源的基础,也是一个国家的战略性基础设施,它在国家经济建设中的作用举足轻重。因此发展新型航天运载系统已经迫在眉睫。总体来看,世界航天运载系统发展的趋势包括五个方面[1] :一是运载能力不断提高,模块化设计,大直径,少级数,采用无毒推进剂;二是发射方式多样化:陆地发射、海上发射、空中发射;三是冗余设计,提高可靠性;四是低成本,简化操作;五是可重复使用。
本文构想出了一套新型的航天运载体系,即“通天桥”航天运载系统。基于真空磁悬浮原理,结合我国目前磁悬浮列车的技术储备及研究方向,对真空管道的实现、磁悬浮管道的构建、磁悬浮方式的选择和轨道的布置等进行了深入研究。
结合我国的得天独厚的地理优势,“通天桥”系统中航天器脱离管道地点设置在喜马拉雅山脉的顶峰。当航天飞行器脱离“通天桥”系统之后,采用火箭发动机,最终将该航天运载器以7.9 km/s的速度推进入太空预定轨道。
2. “通天桥”航天运载系统的整体描述
“通天桥”航天运载系统的整体构形如图1所示。利用现阶段发展日趋成熟的真空磁悬浮技术,将航天器加速到适当的速度并飞行至一定的高度,随后航天器利用自身携带的燃料通过火箭发动机进一步加速,最终到达预定轨道。“通天桥”航天运载系统运载能力强、可重复利用、安全性可靠性高、经济环保、技术难题少,是目前来说理想的、工程实现可能性很大的新型航天运载系统方案,可以为人类探索太空提供较廉价–高效–安全的航天运载支持。
“通天桥”航天运载系统由2部分组成:磁悬浮加速管道系统与航天运载器。具体来说就是在喜马拉雅山脉处依山而建一条真空磁悬浮加速管道,管道出口建在珠穆朗玛峰海拔约8.5 km处。航天器的发射过程分为两步,第一步:航天运载器在真空弧形管道内依靠磁悬浮系统加速到一定速度,上升至8.5 km处,然后与水平面呈一定角度飞出管道;第二步:航天运载器通过火箭发动机与自身携带的燃料继续加速,最终以大于7.9 km/s的速度进入距地面400公里以上的预定轨道。
我们构想形成的方案“通天桥”航天运载系统在不远的未来是可行性的,主要体现在:
(1) 圆弧形管道建在平均海拔为4000 m的青藏高原上,倚靠珠穆朗玛峰,最终出口高度约为8.5 km。虽然目前青藏高原基本处于未开发状态,人类对珠穆朗玛峰的了解也并不多,但是随着人类对自然科学的进一步了解和工程方面技术的提高,真空磁悬浮管道是可以建成的。
(2) 真空磁悬浮管道的设计参考目前中国、日本和德国的磁悬浮技术,解决了航天器在管道内的加速问题。
(3) 航天器加速分为两个阶段,第一阶段加速是在真空磁悬浮管道中加速至3.2 km/s,从管道飞出后利用火箭发动机进行第二阶段加速,最终以约7.9 km/s的速度抵达预定轨道,第二阶段加速过程参照空天飞机二级加速的相关技术。这种加速方案降低了真空磁悬浮的技术要求,利用真空磁悬浮管道加速至3.2 km/s这一目标在未来十年是可以实现的。由于其第二阶段加速所使用的燃料消耗量少,因此航天器的入轨有效载荷高。
在真空磁悬浮管道内加速飞行时,航天器的尾翼是处在飞行器体内,当航天器飞出真空磁悬浮管道后,其尾翼打开,该航天运载器的气动外形仿X-33。
故按照本运载系统的设计构想,通天桥的建造工程在不久的将来可以实现,所要达到的运载效果也可以在最大程度上得以实现。
3. 真空磁悬浮管道具体的构建方式
3.1.真空磁悬浮管道整体结构的描述
喜马拉雅山平均海拔为4000米,真空磁悬浮管道倚靠珠峰而建,管道形状呈劣弧形,最低处部分管道建至山体表面下一千米处。管道总长34.65 km,起点部分海拔3500米,终点在珠峰海拔8500米处。具体如图1所示。
3.2.真空磁悬浮管道内部结构设计的原理
“通天桥”航天运载系统的超导磁悬浮原理[2] -[7] 如下:超导磁悬浮航天器上装有由超导电磁铁构成的感应动力集成设备,它由永磁铁,感应超导电磁铁,磁浮驱动绕组,悬浮导向绕组组成。
悬浮系统:在管道底部与顶部装有永磁铁,宽度为3 m,管道底部与磁浮航天器的间隙达100 mm,提供悬浮力;顶部间隙为120 mm,提供斥力,使磁浮航天器在管道内的高度保持不变。

Figure 1. The sketch map of “Heaven Bridge” space transportation system
图1. “通天桥”航天运载系统示意图
推进系统:在管道两侧各安装有3个宽度为1.7 m的横向的“8”字形磁浮驱动绕组。真空超导磁悬浮管道由沿线设置的牵引变电所向地面导轨两侧的驱动绕组供给三相交流电。当向驱动绕组供给与航天器运动速度相适应频率的三相交流电时,驱动绕组就会产生移动电磁场,在导轨上产生移动电磁场的吸力与推力,推动航天器前进。为了使超导磁悬浮航天器能精确的在移动电磁波的波峰上运动,在地面导轨上安装有航天器运动位置探测器。根据探测器传递的信息,调整三相交流电的供电,精确控制电磁波形,确保航天器的高速运行。
导向系统:在管道两侧的中央附近各安装有2个宽为0.5 m的纵向的“8”字形磁浮导向绕组。当航天器横向偏离中心时,由导向绕组产生的电磁场与磁浮航天器上的超导磁体相互作用,近侧方为斥力,远侧方为吸力,从而使航天器回到中心位置。因此,航天器在任何运动速度下都能稳定地在管道中心部运动。
3.3. 真空磁悬浮管道内真空环境的实现
真空是一种不存在任何物质的空间状态,是一种物理现象。航天工业上的真空指的是气压比标准大气压小的气体空间,是指稀薄的气体状态,又可分为高真空、中真空和低真空,地球以及星球中间的广大太空就是真空。
“通天桥”航天运载体系中真空管道将会被设计成高真空状态,从而在极大程度上减小了航天器在加速过程中遇到的空气阻力。真空管道利用真空泵来实现,真空泵主要有分子泵,离子泵和低温泵。
分子泵原理:每分钟旋转数万次的高速旋转叶片撞击气体分子,被撞击的气体分子碰撞到固定叶片后又被弹到下一个旋转叶片上,最终被送到排气口。旋转叶片和固定叶片的方向相反,使分子难于逆行。离子泵原理:通过溅射现象,使Ti离子化,Ti离子化学反应活性高。和气体分子反应之后生成化合物。低温泵原理:利用气体在超低温表面凝结而达到排气效果。以上三种原理均能达到超高真空(10~11 Pa)且排气速度快,现在已能得到0.0000000001大气压的高真空。
由于航天器在高度8.5 km下一直处在临近真空环境中,在出管道时,大气压突然增加,给航天器带来极大的阻力。为了减少阻力,可以在管道出口处设置高速(低气压)气流的过渡阶段,具体建造方式如图2。
4. 运载系统总体设计方案的数值仿真
4.1. 航天器运动过程的数学模型
4.1.1. 航天器运动数学模型
(1) 航天器在真空磁悬浮管道内的运动方程
采用以下微分方程描述航天运载器在真空磁悬浮管道内的运动轨迹:

式中, :飞行速度,
:飞行速度,![]() :轨迹倾角,
:轨迹倾角,![]() :偏航角,
:偏航角,![]() :飞行高度,
:飞行高度, :纬度方向的距离,
:纬度方向的距离, :经度方向的距离,
:经度方向的距离, :磁悬推–拉力,
:磁悬推–拉力,![]() :磁悬浮力,
:磁悬浮力,![]() :磁悬侧向控制力,
:磁悬侧向控制力,![]() :地球自转角速,
:地球自转角速,![]() :空气阻力(攻角与侧滑角均 = 0时),值得指出,在真空磁悬浮管道内仍然存在很稀薄的空气,即空气阻力
:空气阻力(攻角与侧滑角均 = 0时),值得指出,在真空磁悬浮管道内仍然存在很稀薄的空气,即空气阻力![]() 是
是
很微弱的,无升力,因此攻角=0。 是在速度坐标系,
是在速度坐标系, 是在地面坐标系。
是在地面坐标系。
(2) 航天器脱离真空磁悬浮管道后的运动方程
采用以下微分方程描述航天器上升轨迹[8] :



 ,
, ,
,
式中,![]() ——维度,
——维度,![]() ——经度,
——经度,![]() ——推力,
——推力,![]() ——攻角,
——攻角,![]() ——推力方向角,
——推力方向角, ——飞行器距地心得距离。
——飞行器距地心得距离。
4.1.2. 飞行器的模型
(a) 气动力模型:采用相似于X-33的几何外形(气动特性模型),如升力系数与阻力系数如图5与图6所示,气动参考面积S = 28.3 m2。
(b) 飞行器推进系统特性模型:采用类似于X-33飞行器的火箭发动机特性模型。发动机的比冲如图7所示,推力向量由最大推力 、推力大小控制量
、推力大小控制量![]() 、推力方向控制量
、推力方向控制量![]() 表示,即
表示,即
 (1)
(1)
(c) 航天飞行器的质量模型为:
 (2)
(2)
式中: ,
, 依次是轨道飞行器的结构质量与燃料质量。取
依次是轨道飞行器的结构质量与燃料质量。取 ,
, ,即发动机燃料质量不超过
,即发动机燃料质量不超过 。
。
4.2. 航天器运动过程的数值仿真及总体设计方案的比较
本文采用了航天器总体–轨迹优化的通用数值仿真方法,即静态参数优化+基于极值原理的共轭梯度
Figure 2. Buffer device at the end of vacuum magnetic levitation pipeline
图2. 真空管道末端高速气流的缓冲装置

Table 1. The designed parameter and performance comparisons of the three designed projects
表1. 三种方案的设计特征与性能
算法[9] ,优化设计了“通天桥”航天运载系统的真空磁悬浮加速管道,航天器在真空磁悬浮加速管道内的飞行轨迹,以及航天器脱离真空磁悬浮加速管道后的飞行轨迹。经过系统反复迭代数值仿真来优化设计运载系统的总体设计参数与飞行过程,得到了大量的数值仿真设计方案,再优化筛选出三个设计方案,这三个方案的仿真结果如表1所示,对表1分析如下。
方案一与方案二相比,所建管道长度、切向加速度、出管道后航天器继续加速需要的燃料消耗量、出口速度相同,但是喜马拉雅山脉的平均海拔为4000米,故真空管道有一部分是建在山体下的,可以看出方案二在地下建造管道的深度比方案一大,这就造成了技术及施工困难等问题。而且方案二的法向加速度比较大,那么航天器在真空管道中加速时耗费的电能就比较多。由比较可以看出方案一比方案二可行性更大。
方案一与方案三相比,虽然方案三中出管道后航天器继续加速需要的燃料消耗量较少,但是方案三中需要建造的管道长度较大,弧形管道最低点高度比较低,管道建在地下的部分越多,施工越困难,而且它需要的法向加速度较大,那么航天器在真空管道中加速时耗费的电能就比较多。
综上所述,这三种方案里面,方案一是最优方案。
4.3. 运载系统总体最优设计方案的数值仿真结果及分析
最优方案(方案一)的仿真飞行结果给出如下:
4.3.1. 真空管道内的加速运动
在真空管道中的加速过程:航天器首先在长约34.65 km的弧形真空管道内加速约21秒,最终在距海平面约8.5 km的管道出口处以大约3.2 km/s的速度,与水平面为22度的轨迹倾角飞出。其真空管道高度随长度的变化量如图3,切向加速度、法向加速度随时间的变化如图4,航天器速度随时间的变化如图5,航天器在管道中运动航程的长度随时间的变化如图6,航天器转弯半径随时间的变化如图7。
Figure 3. The height of vacuum pipeline with the change of length (the trajectory of spacecraft in the pipeline)
图3. 真空管道高度随长度的变化即航天器在真空管道中加速的运动轨迹
Figure 4. The tangential and normal accelerations of the spacecraft with the change of time
图4. 航天器的切向加速度、法向加速度随运动时间的变化
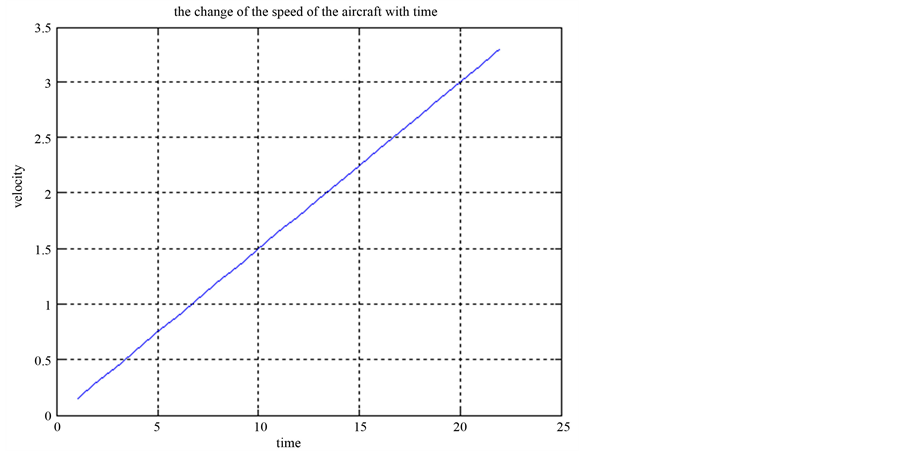
Figure 5. The speed of the spacecraft with the change of flight time in pipeline
图5. 航天器速度随加速运动时间的变化

Figure 6. The pipeline length with the change of flight time
图6. 航天器在管道中运动航程随时间的变化
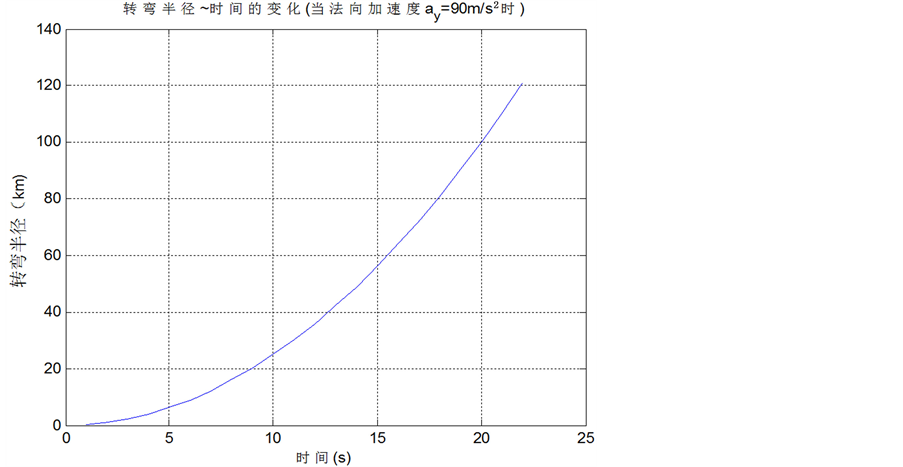
Figure 7. The maneuvering turning radius of spacecraft with the change of flight time
图7. 航天器转弯半径随时间的变化
数值仿真结果分析:
由图3可以看出,真空管道的形状为弧形,起点高度为3548.58 m,最终高度为8500 m,中间有部分管道位于山体表面下部一到二千米处。从图4中可以看出航天器加速过程中切向加速度为恒定值150 m/s2,法向加速度随时间增加。从图5可以看出航天器速度随时间呈直线增加,最终出离管道时速度为3.2 km/s,与地面倾角为150度。从图7可以看出航天器在不同的加速时间段内其轨迹对应的曲率半径在不断地变化之中,速度越大时对应的转弯半径也越大,所需向心力不会太大,因此管道可以承受航天器加速所带来的对管道的作用力。
综上,航天器脱离真空磁悬浮加速管道后的时刻,速度约为3.2 km/s,距海平面高度约为8.5 km,轨迹倾角为22度。
4.3.2. 出离真空管道后的加速飞行
出离真空管道后的加速过程:3-D飞行轨迹见图8,速度~飞行时间见图9,轨迹倾角~飞行时间的变化见图10,偏航角~飞行时间的变化见图11,飞行高度~速度的变化见图12,质量~时间见图13。
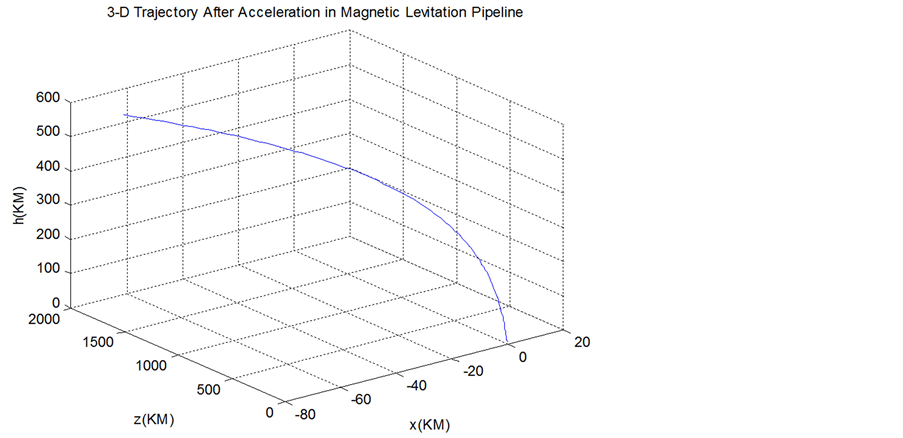
Figure 8. The 3-D trajectory of spacecraft with the change of flight time
图8. 航天器三维飞行轨迹随时间变化
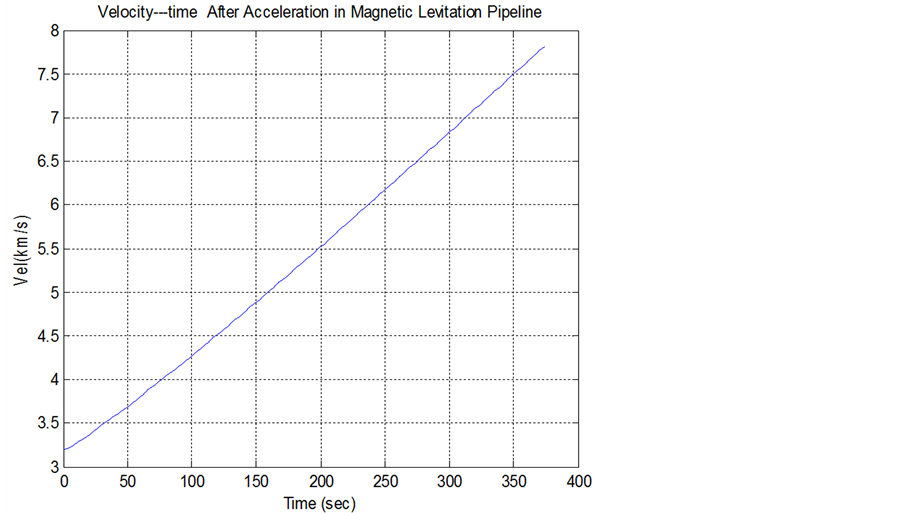
Figure 9. The velocity of the spacecraft with the change of flight time
图9. 航天器出管道后速度随时间变化

Figure 10. Path angle with the change of flight time
图10. 轨迹倾角随时间的变化
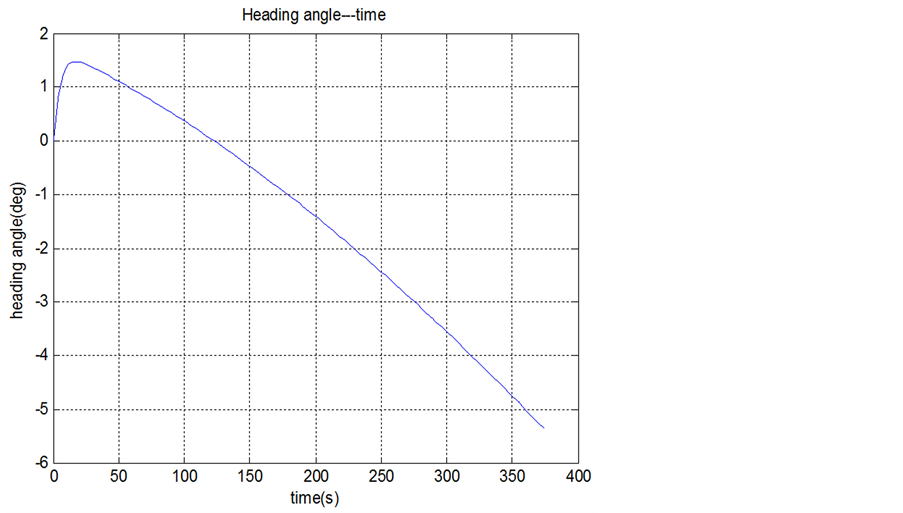
Figure 11. Rolling angle with the change of flight time
图11. 航天器偏航角随时间变化
从图8可以看出:航天器从距海平面8500米的真空管道口飞出后,以3.2 km/s的初始速度继续加速,经370秒后进入距地球约530公里的预定轨道。从图9可以清楚地看出:加速过程中,航天器的速度直线上升,最终速度达到7.9 km/s。这是因为在管道内处于临近真空状态,而出离管道后,虽然有高速(低气压)气流的过渡阶段,但航天器突然受到外界很大的阻力,速度急剧下降,发动机点火后,航天器继续
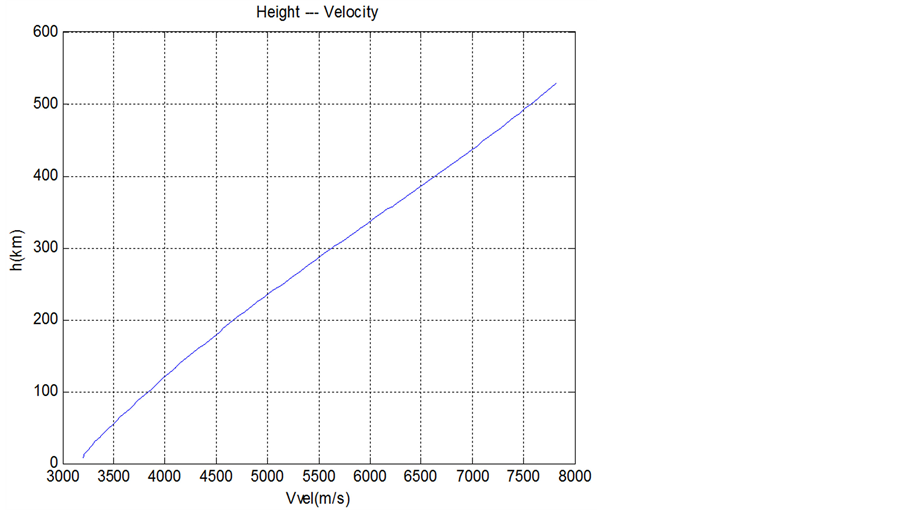
Figure 12. The height of spacecraft with the change of velocity
图12. 航天器飞行高度随速度的变化
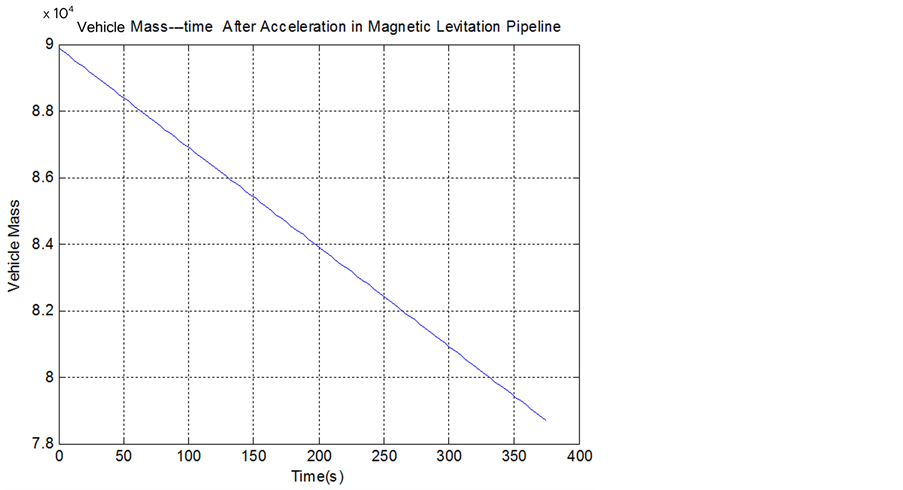
Figure 13. The mass of the spacecraft with the change of flight time
图13. 航天器质量随时间的变化
加速,最终达到7.9 km/s。从图13可以清楚地看出:航天器初始质量为90吨,进入预定轨道后最终质量为78吨,燃料质量只占12吨,航天器的结构与有效载荷共18吨,燃料消耗只占为13.3%,与现在的航天运载有效载荷相比,此飞行过程的优势显而易见。
航天器首先在长约34.65 km的弧形真空管道内加速约21秒,最终在距地面约8.5 km的管道出口处以约为3.2 km/s的速度,与地面约为22度的倾角飞出。航天器脱离管道后继续加速,飞行过程中燃料消耗量12 t,飞行器结构与有效载荷质量为78 t,航天器速度从3.2 km/s加速到7.9 km/s,高度从距海平面8.5 km上升到530公里进入预定轨道。
5. 结论
本文构想出一套新型的航天运载系统,即“通天桥”航天运载系统,给出了该新型航天运载体系统真空磁悬浮管道组成与内部结构,航天飞行器及其它地面设施等。并基于现有的磁悬浮(如磁浮列车)技术,传统航天运载器技术,充分利用地球表面的最佳地理条件(喜马拉雅山),在各种技术约束条件下,一体化优化设计了真空磁悬浮管道的主要外形参数,以及相应航天运载器在真空磁悬浮管道内加速与出离管道后的飞行过程(4-维飞行轨迹)等,验证了该“通天桥”航天运载系统在工程上的可行性。
与现阶段世界广泛使用的航天运载系统(多级火箭运载)相比,“通天桥”新型航天运载系统有以下几个突出优点:(1) 有效载荷大,运载成本低;(2) 可重复利用,运载成本低;(3) 安全系数大;(4) 环保;(5) 操作简便,高效率地使用方便。
参考文献 (References)
- [1] 龙乐豪 (2004) 中国航天运载系统的现状与张望. 中国航天, 8, 9-16
- [2] 荆华, 王素玉, 等 (2009) 不同温度下高温超导磁悬浮悬浮性能实验研究. 博士生学位论文, 西南交通大学, 成都, 2009.4.
- [3] 吴磊 (2011) 真空管道磁悬浮列车的承载管道研究. 研究生学位论文, 西南交通大学, 成都.
- [4] 陈棣湘 (2005) 常导型高速磁悬浮列车电磁系统的研究. 国防科学技术大学研究生院.
- [5] 芦逸云 (2009) 永磁轨道上方高温超导块磁悬浮实验与仿真研究. 工程博士论文, 西南交通大学, 成都.
- [6] 赵春发, 翟婉明 (2002) 磁悬浮车辆系统动力学研究. 研究生学位论文, 西南交通大学, 成都.
- [7] 张永, 徐善刚, 金能强 (1998) 高温超导磁悬浮列车模型悬浮方案的研究. 中国科学院电工研究所.
- [8] 黄国强, 南英, 陆宇平 (2010) 二级入轨空天飞机上升轨迹优化. 宇航学报, 3, 641-647.
- [9] 南英, 陈士橹, 严辉 (1996) 航天器轨迹优化的通用数值方法. 飞行力学, 3, 20-25.
- [10] 南英, 陈士橹, 严辉 (1995) 二级入轨航天运载器最优分离飞行状态研究. 飞行力学, 4, 1-7.