Journal of Electrical Engineering
Vol.
07
No.
02
(
2019
), Article ID:
30627
,
7
pages
10.12677/JEE.2019.72009
Research on Suspension Chopper of Medium Speed Maglev Train
Hongwei Jiang1, Chen Chen2, Lijun Rong2, Wen Ji2
1CRRC Zhuzhou Locomotive Co., Ltd., Zhuzhou Hunan
2Maglev Transportation Engineering R & D Center, Tongji University, Shanghai

Received: May 13th, 2019; accepted: May 28th, 2019; published: June 4th, 2019

ABSTRACT
According to the requirement of suspension control system of medium-speed maglev train, a four-quadrant H-type suspension chopper circuit is designed to solve the problem that the current medium-speed and low-speed maglev controller cannot meet the requirement of medium-speed maglev control. The working principle of the circuit and the selection of key devices are analyzed theoretically. On this basis, a suspension chopper is developed and tested. The test results show that the suspension chopper developed in this paper can meet the requirements of suspension control performance.
Keywords:Medium Speed Maglev Train, Suspension Control, Chopper, Circuit Output
中速磁浮列车悬浮斩波器优化研究
姜宏伟1,陈琛2,荣立军2,吉文2
1中车株洲电力机车有限公司,湖南 株洲
2同济大学磁浮交通工程技术研究中心,上海
收稿日期:2019年5月13日;录用日期:2019年5月28日;发布日期:2019年6月4日

摘 要
根据中速磁浮列车悬浮控制系统的要求,针对目前中低速磁浮悬浮控制器不能满足中速磁浮悬浮控制要求的问题,设计了四象限H型悬浮斩波电路,并对电路工作原理和关键器件选型进行了理论分析。在此基础上,对研制出的悬浮斩波器进行了试验研究。试验结果表明本文研制的悬浮斩波器能够满足悬浮控制性能要求。
关键词 :中速磁浮列车,悬浮控制,斩波器,电流输出

Copyright © 2019 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
悬浮导向系统是EMS型磁浮列车上关键系统之一。磁浮列车的悬浮导向系统使车辆可以在运行线路上实现无接触的悬浮与导向,悬浮系统提供支承车辆浮起的垂向力,导向系统则提供使车辆中心线与轨道中心线保持一致的横向力。通过调节悬浮电磁铁和导向电磁铁中励磁线圈的电流来控制悬浮力和导向力的大小,使悬浮电磁铁和导向电磁铁功能面与轨道相应功能面保持一定的间隙 [1] [2] 。
研制时速200公里中速磁浮交通系统是“十三五”国家重点研发计划,其中悬浮和导向控制器的研制又是其中的关键技术难题 [3] 。悬浮控制器包括主电路和控制电路,是磁浮列车悬浮控制系统的重要组成部分,悬浮控制器主电路根据控制电路的要求为悬浮电磁铁提供激励电流,又称为悬浮斩波器。然而,由于中速磁浮列车悬浮控制器输入电压范围、电磁铁电感电阻等参数,以及悬浮控制重量及控制性能已与中低速磁浮列车具有较大区别,目前用于中低速磁浮列车的悬浮控制器已不能满足中速磁浮悬浮控制的要求,因此,本文根据中速磁浮悬浮控制系统要求,设计了适应中速磁浮列车的悬浮导向斩波器。
2. 主电路原理分析
根据悬浮控制系统的要求,悬浮斩波器为悬浮电磁铁线圈提供单向电流,因此采用两象限H型斩波电路就可以满足要求,然而目前国内磁浮列车也有采用永磁电磁混合悬浮的方式 [4] [5] ,为此扩展悬浮斩波器的功能,在采用电磁永磁混合悬浮方式下也可以满足双向电流输出的要求,本文设计了四象限H型斩波器电路如图1所示。
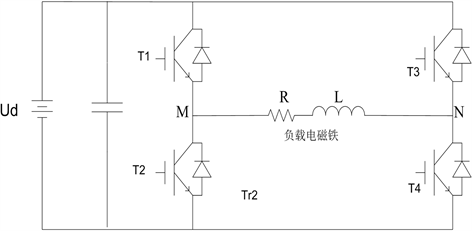
Figure 1. H-type four quadrant main circuit structure
图1. H型四象限主电路结构
图1中的R和L为负载电磁铁的等效电路,电压和电流的参考方向如图所示。当开关管T1、T4同时导通时,如果电磁铁电流大于零,则将正向增大;如果电磁铁电流小于零,则T1、T4上的二极管续流,电流将反向减小。当开关管T2、T3同时导通时,如果电磁铁电流小于零,则其电流值将反向增大;如果电磁铁电流大于零,则T2、T3上的二极管续流,电流将正向减小。从而满足悬浮系统起伏和降落时对快速性能的要求。
悬浮斩波器通常情况下采用PWM调制方式,输入的控制指令可以等效为占空比D (图2)。

Figure 2. Voltage and current waveform
图2. 电压电流波形
这里设斩波周期为T,元器件均为理想元器件,开关管导通开始时刻为t1,则 ,开环时状态分析如下:
1) 当 时:
当 时, ,T1、T4关断, ,在反向电压作用下 按指数规律迅速下降,可列出如下微分方程式:
(1)
即
(2)
解此微分方程可得:
(3)
当 时, ,代入上式(3)可得:
(4)
2) 当 时
此时,T1、T4导通,在电源电压作用下, 按指数规律增长,可列出如下微分方程式:
(5)
即
(6)
解次微分方程可得:
(7)
3) 当 时, ,代入上式(7)可得:
(8)
联立微分方程的解可得:
(9)
(10)
3. 主要参数及器件选型方法
斩波器主电路参数选择以主要斩波器的主要技术条件为依据,充分考虑磁浮列车工作环境要求,保证产品工作性能和可靠性。参数设计借鉴和参考了上海高速磁浮的一些技术参数设计方法。斩波器的主要技术参数如下 [6] :
斩波器额定输入电压:DC480V;
输入电压变化范围:DC270V~DC600V;
输出电流:0~96 A;
最大启动工作电流:100 A;
最大工作开关频率:10 kHz。
1) 主功率开关器件IGBT选择
功率器综合考虑电流、电压和开关频率三个方面的要求,同时考虑到开关损耗和安全富裕量。开关器件和电压和电流等级最大值2倍考虑,选用300 A、1200 V等级的IGBT。
2) 滤波电容选择
滤波电容选择考虑电压等级、电容量和谐波电流三个方面因素。斩波器器的负载最大瞬时启动电流为100 A,由于负载为电感,电流线性上升,为三角波性,可以得到电感上的电流为 A,即57.7 A,考虑到电感上面含有直流分量,则电容上的交流分量为 ,即28.9 A。考虑控制器结构体积空间,采用2个额定电压为DC400V等级的电容串联 [7] 。
3) 主接触器和充电接触器选择
主要接器和充电接触器的选择考虑主触头电压和电流等级及操作线包的电压等级。
主接触器操作电压为DC480V。其工作电流可输入功率和最小工作电压,即:
(11)
其中:P按额定输入功率2倍余量考虑,即6 kW, 取最小工作电压DC270V。接触器操作线包电压采用DC24V供电,且具有常开辅助触点,用于控制电路的反馈信号接收。
4. 试验研究
根据以上理论设计的悬浮斩波器,在电磁铁感性负载上进行了以下关键试验验证工作。
1) 额定负载试验
输入电压270VDC~600VDC范围内,输出PWM波形无失真、IGBT关断时峰值电压小于母线电压的30%,电流波形连续,有正常的充电、放电过程,电流波形为三角波。
主电路在输入270VDC、480VDC和600VDC三种情况下,悬浮控制器输出电流与IGBT CE两端输出电压波形图分别如图3、图4、图5所示。由图可知,负载试验满足试验大纲性能要求。
2) 最大冲击电流试验
在主电路输入480 V额定电压时,使斩波器输出100 A、0.2 s的冲击电流,试验后未有器件损坏且能正常工作,测试波形如图6。
5. 结论
本文根据“十三五”国家重点研发计划研制时速200公里中速磁浮交通系统的要求,从基本原理出
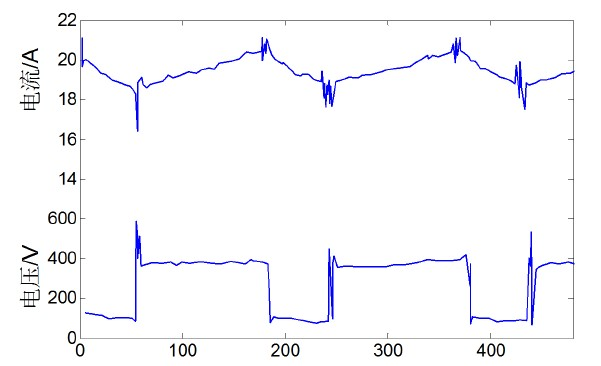
Figure 3. 270 V DC input IGBT voltage and current waveform
图3. 270 V直流输入IGBT电压和电流波形
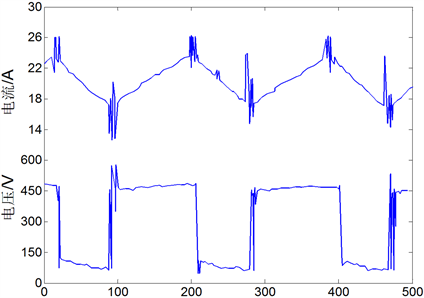
Figure 4. 480 V DC input IGBT voltage and current waveform
图4. 480 V直流输入IGBT电压和电流波形
Figure 5. 600 V DC input IGBT voltage and current waveform
图5. 600 V直流输入IGBT电压和电流波形
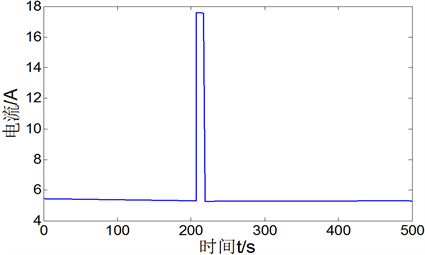
Figure 6. Maximum inrush current waveform
图6. 最大冲击电流波形
发设计了悬浮斩波器,并进行了相关试验验证。试验结果表明:
1) 在不同等级输入电压下,悬浮斩波器输出电流稳定,满足悬浮控制性能要求;
2) 在100 A最大冲击电流下,悬浮斩波器能够正常工作,说明器件选型合理。
本文的研究结果为悬浮控制系统的研究提供了合理的设计方法和试验基础。
基金项目
国家重点研发计划资助(2016YFB1200601)。
文章引用
姜宏伟,陈 琛,荣立军,吉 文. 中速磁浮列车悬浮斩波器优化研究
Research on Suspension Chopper of Medium Speed Maglev Train[J]. 电气工程, 2019, 07(02): 85-91. https://doi.org/10.12677/JEE.2019.72009
参考文献
- 1. 魏庆朝, 孔永健, 时瑾. 磁浮铁路系统与技术[M]. 北京: 中国科学技术出版社, 2010.
- 2. 张佩竹. 中低速磁悬浮技术特征及工程化研发[J]. 铁道标准设计, 2006(1): 254-258.
- 3. 张志洲, 张惠霞. 韩国磁悬浮列车发展[J]. 国外铁道车辆, 2006, 43(4): 8-12.
- 4. 吴祥明. 磁悬浮列车[M]. 上海: 上海科技出版社, 2003.
- 5. 王宁, 姚煊道. 软开关悬浮斩波器研究[J] .电力电子技术, 2006, 3(40): 86-87.
- 6. 蒋启龙, 胡基士. 悬浮斩波器研究[J]. 电力电子技术, 1997, 3(22): 60-62.
- 7. Liu, S.Q., Chen, D.R. and Xu, F. (2004) Study of Switching Power Amplifier for Active Magnetic Bearing. The 4th International Power Electronics and Motion Control Conference (IPEMC 2004), Xi’an, 2004, Vol. 3, 1539-1543.