Dynamical Systems and Control
Vol.
10
No.
01
(
2021
), Article ID:
39520
,
12
pages
10.12677/DSC.2021.101001
基于PSO-ELM网络控制系统容错控制研究
李吉萌,孙海义*
沈阳建筑大学理学院,辽宁 沈阳

收稿日期:2020年11月29日;录用日期:2020年12月22日;发布日期:2020年12月30日

摘要
针对动态系统执行器任意单通道故障问题,提出一种以闭环极点作为故障信息设计故障诊断系统并实现容错控制。在执行器任意单通道发生故障或不同通道的故障增益发生变化时,通过极点观测器得到极点在给定区域内的变化判断故障。将闭环系统极点作为极限学习机ELM (Extreme Learning Machine)故障诊断模型的输入,同时利用粒子群算法PSO (Particle Swarm Optimization)优化极限学习机,实现对系统执行器不同通道的容错控制。通过网络控制系统NCSS (Networked Control Systems)模拟,验证容错控制系统的准确性,极点观测器的精确性和可靠控制器的有效性。
关键词
故障诊断,容错控制,极限学习机算法,粒子群算法,网络控制系统

Research on Fault Tolerant Control of Network Control System Based on PSO-ELM
Jimeng Li, Haiyi Sun*
College of Science, Shenyang Jianzhu University, Shenyang Liaoning

Received: Nov. 29th, 2020; accepted: Dec. 22nd, 2020; published: Dec. 30th, 2020

ABSTRACT
Aiming at the problem of any single channel failure of dynamic system actuators, a closed-loop pole as fault information is proposed to design a fault diagnosis system and realize fault-tolerant control. When any single channel of the actuator fails or the failure gain of different channels changes, the pole observer obtains the change of the pole in a given area to judge the fault. The closed-loop system poles are used as the input of the fault diagnosis model of the extreme learning machine, and the particle swarm algorithm is applied to optimize the extreme learning machine to realize the fault-tolerant control of the diverse passage of the system actuator. Using network control system simulation, verify the accuracy of the fault-tolerant control system, the exactness of the vertex observer and the validity of reliable controllers.
Keywords:Malfunction Diagnosis, Fault-Tolerant Control, Extreme Learning Machine Algorithm, Particle Swarm Optimization Algorithm, Networked Control Systems

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着现代控制工程系统的快速发展,工程系统故障引发的后果也越来越严重,为了加强工程系统的稳定性,人们逐渐加大对容错控制的研究 [1] [2]。容错控制是系统发生故障后,通过调节故障或重构信号来保证系统仍然稳定并保证一定的性能指标 [3] [4]。文献 [3] 针对执行器多通道故障问题,提出对控制器的设计,保证了系统的良好性能。文献 [4] 针对网络控制系统传感器故障,建立了相应的诊断器及控制器。将上述所有通道的问题情形都考虑到单一可靠控制器的设计中,但在实际的工程项目中,并不会同时出现全部通道故障,如果在某一部分出现问题,容错控制系统需要考虑所有通道问题,这可能会造成不必要的资源损耗,还有可能会导致系统的性能指标降低。因此,在系统部件的某一通道出现故障时,维持系统稳定性的同时降低容错系统的复杂度仍然是一个难题。
基于对故障诊断的大量研究,目前已经取得了很大的成功,其中极限学习机作为一种新的算法被提出,与传统的神经网络 [5] 的训练方法相比,极限学习机训练速度更快 [6] [7],在大量的实验中表明该算法具有泛化性能,并且应用于飞行器故障诊断 [8],风电机组轴承故障诊断 [9],以及在光电逆变器软故障识别 [10] 等领域中。文献 [11] 针对光伏(PV)电站逆变器的故障诊断进行研究,提出了一种SBELM的精准光伏逆变器的故障诊断方法。文献 [12] 将航空发动机传感器系统发生故障时的数据作为故障诊断的特征信息,利用ELM算法对传感器各通道进行故障诊断和监测。文献 [13] 利用ELM算法建立航空发动机传感器的双冗余故障诊断模型,实现了故障传感器的诊断与定位。上述文献均提到了在所建训练模型的精度相近的情况下,极限学习机算法的训练速率比传统BP神经网络训练速度更快,并且它们的测试精度相近。在极限学习机算法中,通过设置神经元个数和连接权值的方法,大大地缩短了训练时间。文献 [14] 针对滚轮轴承故障信息难以提取等问题,设计特征信息提取及优化ELM算法分类诊断相结合的故障诊断方法,提高了故障识别准确率。获取故障信息对于复杂系统很困难,给故障诊断系统带来很大的困扰。系统运行时只要故障状态不变,极点不会发生变化。这并不需要建立复杂的数学模型进行提取和处理。因此在闭环系统中以极点作为故障信息,利用EML对故障进行分类是很有必要的。
在大量的实例仿真中,当闭环系统的执行器发生故障时,通过对系统极点数据的采集,利用极点变化来对故障进行判断。系统极点的变化更能直观地反映出执行器故障情形。在实际情况下,系统的极点信息无法直接观测,因此设计了极点观测器,能够实时地获取极点信息。
针对闭环系统出现执行器单通道故障诊断问题,基于极点学习和粒子群算法优化极限学习机故障诊断容错控制系统。这一系统主要由极点观测器、PSO-ELM故障诊断器、单一通道故障可靠控制器组成。通过在系统中模拟执行器不同通道的故障,利用极点观测器获取不同通道执行器故障的极点,并将这些数据作为故障信息建立PSO-ELM故障诊断器,实现对故障的诊断。再根据对故障诊断的结果,切换相应的可靠控制器来实现容错控制。最后,通过网络控制系统,验证了该容错控制系统的准确性。
2. 系统设定
2.1. 系统模型
考虑如下系统:
(1)
其中, 、 、 分别为状态向量、控制向量、输出向量,A、B、C为已知的适维系统矩阵。
给定状态反馈控制器
(2)
可得
(3)
其中 。
2.2. 故障分析
2.2.1. 故障诊断
设执行器单通道连续故障增益模型为
(4)
其中 为系统正常的向量, 为在出现问题的向量。 为执行器故障矩阵: ;a为控制器通道总条数; 和 为单位矩阵; ,,。可得故障闭环系统
(5)
其中 。
利用线性矩阵不等式区域的方法,通过确定的LMI区域D和矩阵 ,矩阵 的特征值在区域D中,即 ,则称矩阵 在给定的区域D稳定的。否则,矩阵 的特征值中存在区域D边界上或在区域D外面,称矩阵 在给定的区域D不稳定。
2.2.2. 可靠控制器设计
在考虑发生故障时对执行器第 条通道进行处理。设 ,。
设集合 。
这样描述执行器故障矩阵 。 是在 和 为顶点构成的凸集合中。因此,总能找到 ,,满足 使得 。
考虑故障的闭环系统
(6)
其中 ,确定矩阵 将系统的闭环极点配置到中心在 半径为r的圆域内。
由文献 [15] 可知,在圆盘区域闭环极点需满足
(7)
对于闭环系统(7)及给定的区域D,存在矩阵Q > 0和Y,通过(7)式可得
(8)
可得
(9)
其中j = 1,2存在可行解(Q,Y),则 。
3. 容错控制系统设计
3.1. 容错控制系统设计思想
系统(5)中在正常控制器增益K下,若特征值不在区域D,则需要切换可靠控制器进行容错控制,本文中利用PSO优化ELM参数,进行故障分类,对不同的极点信息进行分类。其原理图如图1所示。
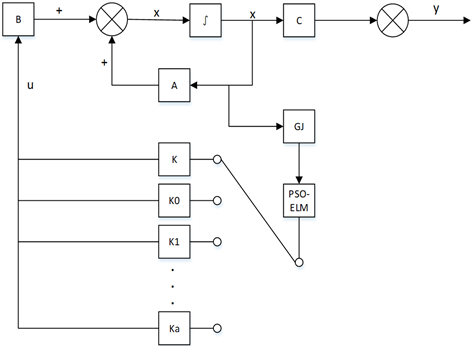
Figure 1. Fault-tolerant control principle diagram
图1. 容错控制原理图
图1中各向量为式(1)中的各参数,GJ为极点观测器,PSO-ELM为故障诊断器,K为正常状态反馈控制器, 为公式(9)求出的第a条通道故障的可靠控制器。在该系统中,如果执行器发生故障,若极点分布在区域D中,则不切换相应的故障诊断器,若极点分布在区域D之外,则切换相应的可靠控制器。
3.2. PSO-ELM故障诊断器设计
根据ELM [16] 在故障识别中的应用,将闭环系统极点的数据采样分类,再利用不同通道的可靠控制器进行容错控制。本文在此基础上引入粒子群算法(PSO),通过寻优的方式找到ELM的最优参数,ELM算法模型如图2所示。
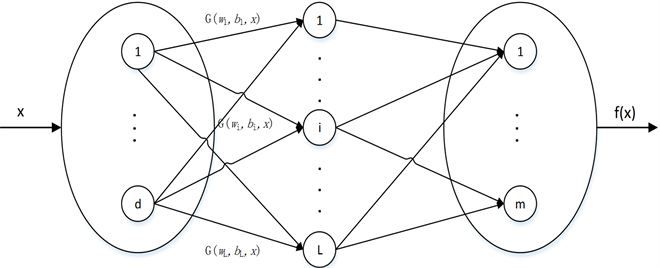
Figure 2. ELM model diagram
图2. ELM模型图
3.2.1. PSO-ELM算法
ELM的参数采用的是随机生成的,虽然在速度上有明显的提高,但是精度却有所降低。粒子群算法 [17] 通过对鸟群个体以及群体的迭代来达到求解最优值,利用PSO算法的这一原理,确定ELM的连接权值和阈值的最优值。本文中的速度V的初始最大值为1,迭代的公式为
(10)
(11)
其中:w是系数;c1和c2是加速值; 表示在n时刻个体j在z维区间的位置; 表示在j时刻个体z维区间的速度; 是鸟群个体的最值; 是群体最优值。
3.2.2. PSO-ELM算法分类步骤
处理后的数据进入ELM模型,此时引入PSO算法,利用其寻优的特性,找到ELM模型中数据的最佳值,算法中的参数通过PSO算法求得最佳值,再利用ELM对数据分类,即可提高速度,还增加了分类的正确性。其模型处理的流程图如图3所示。
3.3. 极点观测器设计
故障闭环系统(5)运行时,极点无法直接得到,需要通过设计极点观测器来获取系统极点。
设故障系统(5)采样初始时间为 ,采样间隔为 ,采集 个状态值,设 时, 为第k个状态值且 。可得第i个状态变化量为 ,由拉格朗日可得
(12)

Figure 3. PSO-ELM classification algorithm model diagram
图3. PSO-ELM分类算法模型图
由式(3)和式(6),可得
(13)
假设矩阵 ,。若Z可逆,则得到系统矩阵 ,将 的极点进行处理,得到有序的极点数据。
4. 仿真
4.1. 网络控制系统实例
根据文献 [18],针对Ncss存在的时延问题,利用上述故障诊断系统进行容错控制。对图4系统作如下假设:

Figure 4. Network control system structure diagram
图4. 网络控制系统结构图
1) 传感器采集周期为T,连续控制器事件驱动,且执行器的工作周期为 (n为正整数),记 。
2) 传感器与控制器之间和控制器与执行器之间的随机时延 、 。k个周期采样的时延 。当 时,对系统(1)离散化为
(14)
3) 采用式(2)。以k~(k+1)采样周期为例,对网络控制系统的随机短时延问题进行分析建模。由于执行器的工作方式为时间驱动,并且执行器的执行频率比采样传感器小,假如在给定的采样周期k~(k+1)存在的时延为 ,即时延 在执行器两个执行周期 、 之间。由于执行器采用的是时间驱动,尽管执行器的执行信息发生改变,但执行器的状态并没有发生变化,需要等到新的执行周期开始,即当时间达到 时,才会改变控制状态。
对上述网络控制系统的假设,得到对式(1)的网络控制系统矩阵参数如下
4.2. 网络控制系统故障模型
本文给定的LMI区域D是以2为半径,圆心在(-2,0)的复平面圆域内,满足系统的控制规律:
考虑到执行器发生故障时,对式(2)赋值如下, ,,,,。
在 时,执行器发生时延故障,以故障增益 , 进行模拟。得到如图5所示极点分布图。
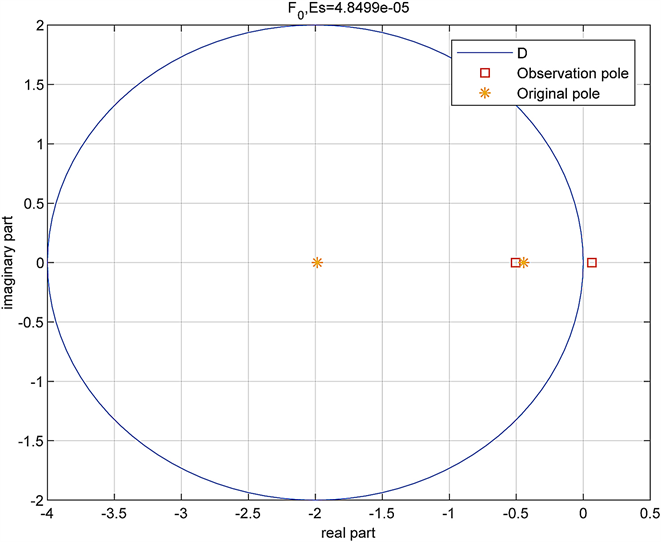
Figure 5. Pole distribution map
图5. 极点分布图
图5中,星状形状的代表无故障情况下的极点的分布,正方形的代表出现故障极点的分布,从图中可以看出部分极点已经跳出了圆域,形成不稳定极点。由此可见,发生故障时,影响网络控制系统的稳定性。
4.3. 可靠控制下网络控制系统故障模型
根据式(9),给定的以2为半径,(-2,0)为圆心的LMI区域D中,设定执行器故障增益值 ,。式(6)中 。以NCSS为模型,可得到如图6所示。
图6中,星状形状的点代表正常控制器下的极点分布,正方形的点代表可靠控制下的极点分布,通过设计的可靠控制器,可恢复系统的故障,相应的极点也可恢复进圆内。由此说明本文设计的可靠控制器是有效的。
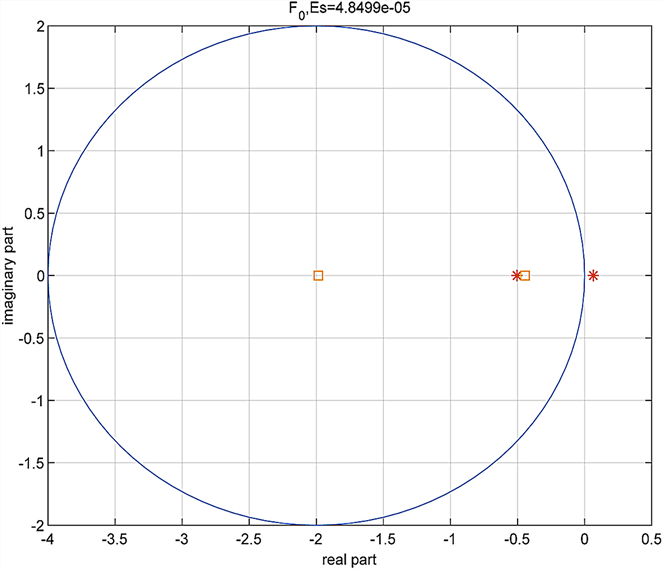
Figure 6. Closed-loop pole distribution diagram of normal controller and reliable controller
图6. 正常控制器和可靠控制器闭环极点分布图
4.4. PSO-ELM系统模型
将闭环系统极点得到的数据,随机选取90组作为本次实验数据。验证隐含层节点数和PSO迭代次数对模型的影响。通过对ELM隐含层节点数及PSO迭代次数的设定,得到对比数据如表1所示。节点数为30,最大迭代次数为40次时,优化迭代结果如图7。

Table 1. Comparison of verification results
表1. 验证结果对比
通过NCSS得到的数据,利用设计好的模型进行分类,在于其他的分类模型相比,此模型的误差仅为0.0266,得到如表2所示结果。仿真如图8所示。

Figure 7. Optimize iterative rendering
图7. 优化迭代效果图
Table 2. Contrast of modeling methods
表2. 建模方法比较

Figure 8. PSO-ELM and ELM comparison chart
图8. PSO-ELM与ELM对比图
仿真中,ELM的节点数设定为30,PSO的惯性权重系数范围为(0.4, 0.8),速度V的初始最大值为1,r1和r2的值是随机在(0,1)的范围内产生,使用PSO对ELM的连接权值w和阈值b寻优得到最优解,由图8可以看出,PSO-ELM与ELM相比,优化后的ELM在准确度方面得到了提升,进一步减小了误差,充分的说明PSO-ELM故障诊断器的可行性。
在故障增益为 , 情况下,系统的真实极点为[−1.9852, −0.4442]。为确定极点观测器的准确性,选取三千个不同时间初值,进行极点观测,观测的极点平均值为[−1.9802, −0.4431],其相对误差分别为0.005,0.0011,误差几乎为0,因此极点观测结果比较准确。
同样的在故障诊断增益为 , 情况下,假设执行器第一条通道发生故障,对网络控制系统进行仿真,可以得到极点观测器的观测值为[−1.9845, −0.4437],PSO-ELM分类器的输出为1,容错控制系统切换到K1可靠控制器。
5. 结论
在以线性定常系统为模型的基础上,针对执行器单一通道故障问题,以极点作为故障信息,设计了单通道可靠控制器、PSO-ELM分类器、极点观测器,实现对执行器不同通道的诊断和容错控制,并应用于网络控制系统随机短时延的实例中。实验结果表明,本文设计PSO-ELM分类器相比于传统的ELM,在故障诊断中分类准确度更高,其诊断结果切换相应的可靠控制器,提高了容错控制的精确度。
基金项目
辽宁省教育厅科学研究项目——理工基础研究项目(Injc2020018),辽宁省百千万人才工程资助项目(2017076)。
文章引用
李吉萌,孙海义. 基于PSO-ELM网络控制系统容错控制研究
Research on Fault Tolerant Control of Network Control System Based on PSO-ELM[J]. 动力系统与控制, 2021, 10(01): 1-12. https://doi.org/10.12677/DSC.2021.101001
参考文献
- 1. 智月明, 姜顺, 潘丰. 非线性系统的非脆弱H∞容错控制[J]. 控制工程, 2016, 23(7): 111-1114.
- 2. 梁思越, 王福忠. 基于极点学习和LSSVM故障诊断的容错控制[C]//第30届中国控制与决策会议论文集(2), 2018: 1130-1135.
- 3. 王福忠, 姚波, 张嗣瀛. 线性系统区域稳定的可靠控制[J]. 控制理论与应用, 2004, 21(5): 835-839.
- 4. 朱灵波, 戴冠中, 康军. 具有传感器故障的网络控制系统保性能可靠控制[J]. 控制与决策, 2009, 24(7): 1050-1054+1058.
- 5. 石向荣. 面向过程监控的非线性特征提取方法研究[D]: [博士学位论文]. 杭州: 浙江大学, 2014.
- 6. 裘日辉, 刘康玲, 谭海龙, 梁军. 基于极限学习机的分类算法及在故障识别中的应用[J]. 浙江大学学报(工学版), 2016, 50(10): 1965-1972.
- 7. Geng, Z.Q., Dong, J.G., Chen, J. and Han, Y.M. (2017) A New Self-Organizing Extreme Learning Machine Soft Sensor Model and Its Applications in Complicated Chemical Processes. Engineering Applications of Artificial Intelligence, 62, 38-50.
https://doi.org/10.1016/j.engappai.2017.03.011 - 8. 宋佳, 石若凌, 郭小红, 刘杨. 基于核极限学习机的飞行器故障诊断方法[J]. 清华大学学报(自然科学版), 2020, 60(10): 795-803.
- 9. 齐咏生, 樊佶, 刘利强, 高学金, 李永亭. 基于形态学分形和极限学习机的风电机组轴承故障诊断[J]. 太阳能学报, 2020, 41(6): 102-112.
- 10. 李蓉, 肖家平. 基于极限学习机的光伏逆变器软故障辨识方法[J]. 重庆科技学院学报(自然科学版), 2020, 22(3): 83-87+108.
- 11. 孙莉, 李静, 李继云, 王磊. 基于稀疏贝叶斯极限学习机的光伏电站设备故障诊断研究[J]. 太阳能学报, 2020, 41(8): 221-226.
- 12. 王雷, 沈龙云, 孙毅刚. 基于ELM的航空发动机传感器故障诊断方法研究[J]. 传感器与微系统, 2015, 34(4): 16-18+26.
- 13. 刘静雅. 基于极限学习机的航空发动机传感器故障诊断研究[D]: [硕士学位论文]. 天津: 中国民航大学, 2015.
- 14. 余萍, 曹洁, 黄开杰. ADCS-ELM算法滚动轴承故障诊断[J]. 传感器与微系统, 2020, 39(5): 129-132+136.
- 15. Yao, B., Rong, J. and Hu, H. (2013) Pole Reliable Assignment of Parabolic Region with Actuator Failure. Journal of Theoretical & Applied Information Technology, 48, 1045-1050.
- 16. 李德利, 张曦煌. 基于并行学习的多层极限学习机[J]. 计算机应用研究, 2018, 35(2): 459-461.
- 17. 李娜. 基于相似日的PSO-ELM算法的短期负荷预测研究[J]. 太原学院学报(自然科学版), 2020, 38(3): 19-22.
- 18. 刘斌, 毛钦. 基于极点配置的随机时延网络控制器设计[J]. 计算机工程, 2019, 45(5): 66-71.