Open Journal of Acoustics and Vibration
Vol.02 No.04(2014), Article ID:15601,8
pages
10.12677/OJAV.2014.24004
Research on the Driving Mechanism and Experiment a Novel Linear Ultrasonic Motor Based on In-Plane Modes
Yunlai Shi1, Jun Zhang1, Sen Feng1, Bo Li2
1State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics & Astronautics, Nanjing Jiangsu
2Bluestar (Beijing) Chemical Machinery Co., Ltd., Beijing
Email: shiyunlai950438@nuaa.edu.cn
Received: Jun. 11th, 2015; accepted: Jun. 24th, 2015; published: Jun. 30th, 2015
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
A new type of linear ultrasonic motor based on the first longitudinal mode and the second bending mode was developed. This paper analyzed the operating principle of the motor and the dynamic properties of the stator using the finite element method, and described the formation process of elliptical motion in detail. The prototype was investigated by the experiment, the motor could reach a maximum speed of 120 mm/s, the maximum thrust of 2.5 N, the ratio of the thrust to weight of 14:1 and the maximum efficiency of 8% at the case of the driving frequency was 55 kHz, peak operation voltage was 400 V, and the pre-pressure was 24 N.
Keywords:Ultrasonic Motor, Linear, Mode In-Plane, Piezoelectric
一种新型面内模态直线超声电机的驱动机理及试验研究
时运来1,张军1,冯森1,李波2
1南京航空航天大学机械结构力学及控制国家重点实验室,江苏 南京
2蓝星(北京)化工机械有限公司,北京
Email: shiyunlai950438@nuaa.edu.cn
收稿日期:2015年6月11日;录用日期:2015年6月24日;发布日期:2015年6月30日

摘 要
利用一阶纵振和二阶弯振作为工作模态,设计了一种新型直线超声电机。分析了其工作原理,并利用有限元软件对电机的定子进行了动力学分析,详述了椭圆运动的形成过程。对样机进行了实验研究,在驱动频率为55 kHz在驱动频率为55 kHz,驱动电压峰峰值为400 V,预压力为24 N时,电机的最大空载速度为100 mm/s,电机的最大推力为2.5 N,推重比达到了14:1,最大效率达8%。
关键词 :超声电机,直线型,面内模态,压电

1. 引言
近30年来,直线型超声电机得了到快速的发展,其种类多样[1] [2] 。按照电机定子所利用的振动位移方向,直线型超声电机可分为基于面外振动型和基于面内振动型。在基于面内振动的众多直线超声电机中,很多电机利用了矩形薄板的面内纵振和弯振作为工作模态 [3] - [8] ,该种结构可以使得电机定子结构更加紧凑和易于小型化。1977年,Bansiavichus开发了一种利用面内模态的直线超声电机 [3] ,它利用矩形薄板面内纵振和弯振作为工作模态,设计了两个驱动足。1994年,Nanomotion公司开发一种类似于前者的直线超声电机,但它只有一个驱动足,安排在压电振子的一端 [9] - [12] 。2004年,南京航空航天大学也对面内模态的直线型超声电机进行了一些研究 [13] ,开发了一种双驱动足面内模态直线超声电机。此三者的共同点是它们都利用了矩形薄板一阶纵振和二阶弯曲振动作为工作模态。本文在对文献 [13] 所开发的面内模态直线型超声电机优化分析的基础上 [14] ,提出了一种新型的面内模态直线型超声电机,对其驱动机理进行了详细的分析并进行了试验研究。
2. 电机结构及定子工作模态
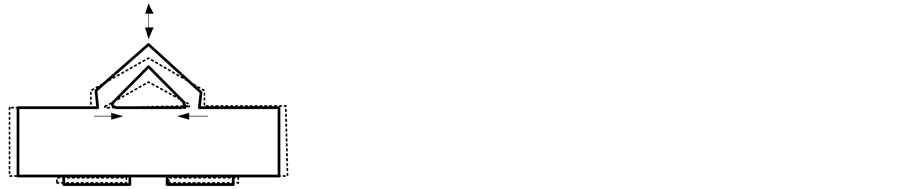
电机整体结构如图1所示。电机定子弹性体为一具有三角形位移放大机构的金属薄板,其底面粘贴了两片压电陶瓷。利用金属薄板上三角形结构部分的顶端作为驱动足。电机动子为一粘贴了摩擦条的滑条。利用弹簧施加定子和动子之间所需的预压力。电机定子驱动足上形成椭圆运动轨迹的关键是首先存在两个工作模态,能够在定子驱动足上形成在空间上相互正交的位移。电机定子工作模态为面内二阶弯曲振动模态和一阶纵振模态。定子弹性体所具有的三角形位移放大结构部分的下面两个顶点分别设计在定子弹性体二阶弯曲振动的波峰和波谷处,在二阶弯曲振动模态下,一个顶点上升,一个顶点下降,从而在驱动足上(即三角形位移放大结构部分的顶点)形成水平方向上的振动,如图2(a)所示。定子弹性体所具有的三角形位移放大结构部分的下面两个顶点在一阶纵振模态下,随着纵向振动的伸缩,把水平方向上的振动转换成驱动足上的垂直振动并在一定程度上进行放大,如图2(b)所示。如此,定子驱动足上由于这两种振动作用形成的位移在空间上具有的相位差。其次,电机定子驱动足上形成椭圆运动轨迹的关键是这两种工作模态能够在相同频率的交变电压信号的激励下被激发出来并在时间上具有的相位差。上述两种条件满足即可在定子驱动足表面形成椭圆运动轨迹。
压电陶瓷的极化方向和施加电场方向如图3(a)所示。压电陶瓷的振动模式为LE振动模式。两片极化
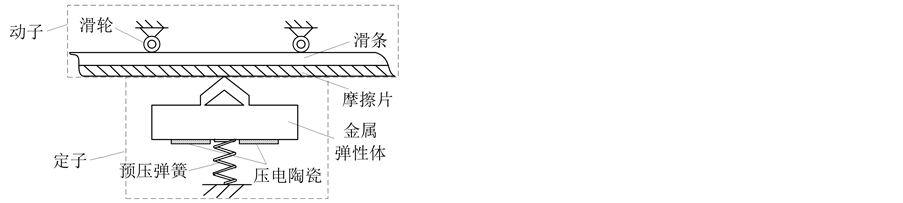
Figure 1. Structure of the linear ultrasonic motor
图1. 直线超声电机结构示意图

 (a) 二阶弯振模态 (b) 一阶纵振模态
(a) 二阶弯振模态 (b) 一阶纵振模态
Figure 2. Operating modes of the stator
图2. 定子工作模态

 (a) 压电陶瓷极化方式 (b) 激励方式
(a) 压电陶瓷极化方式 (b) 激励方式
Figure 3. Exciting mode of the stator
图3.定子的激励方式
方向相同的压电陶瓷片粘贴在定子底面上,当在压电陶瓷极化方向上施加交变电压信号时,压电陶瓷会产生x向伸缩。由于压电陶瓷和金属弹性体通过胶粘贴在一起,压电陶瓷的伸缩运动受到阻碍,在粘接面对金属弹性体产生剪切力,拉动金属弹性体一起变形。当交变电压信号的频率接近定子的两相工作模态频率,并且两片陶瓷片同相伸缩时,可以激发出定子的纵向振动;而当两片陶瓷片反相伸缩时,可以激发出定子的弯曲振动。如果给两片压电陶瓷片施加的激励电压信号如图3(b)所示,定子的两相工作模态则被同时激发出来,但其在时间上的相位差为 ,此时可在定子驱动足上产生椭圆运动。
,此时可在定子驱动足上产生椭圆运动。
图4为按图3(b)所示激励方式的激励下,电机振子在一个周期内的4个状态。在I状态,定子所激发出来的弯曲振动处于最大位置状态,同时处于定子一阶纵振的平衡状态,由此使得电机定子驱动足处于椭圆运动轨迹的右侧最大偏转状态。随着时间的推进,定子依次经历II、III、IV所示状态,再回到I状态,完成一个周期。在这个过程中,电机定子驱动足上形成了逆时针方向旋转的椭圆运动。
3. 电机定子动力学分析
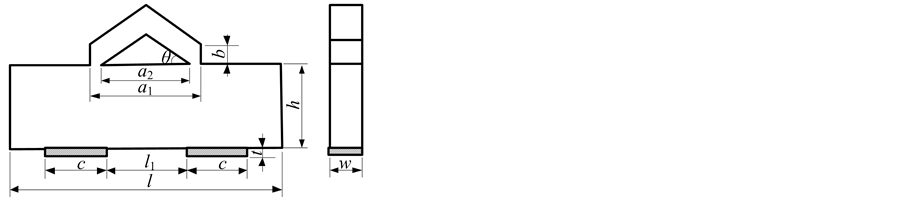
电机定子结构参数及有限元模型如图5所示。定子的参数化尺寸如表1所示。定子弹性体的材料采用不锈钢,其密度为7900 kg/m3,弹性模量为2.11 × 1011 Pa,泊松比为0.3;压电陶瓷采用长 × 宽 × 厚
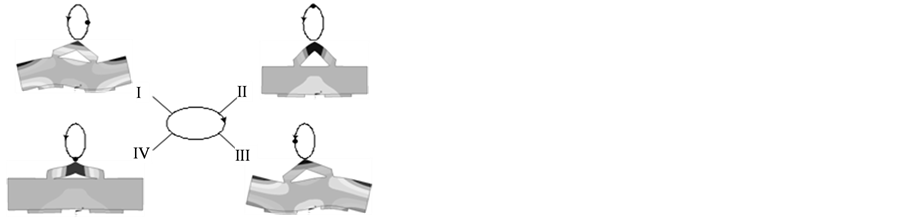
Figure 4. Resonance response analysis of the stator
图4. 电机定子谐响应分析
 (a) 定子结构参数 (b) 定子有限元模型
(a) 定子结构参数 (b) 定子有限元模型
Figure 5. Structure parameters and FEM model of the stator
图5. 定子结构参数及其有限元模型

Table 1. Initial value of the stator structure parameters
表1. 定子的结构尺寸参数初值
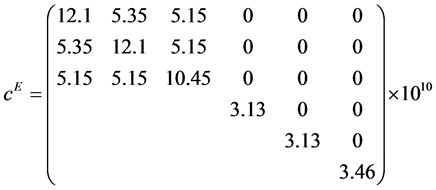
为10 mm × 5 mm × 1 mm尺寸的PZT8矩形薄板, 其密度为7640 kg/m3,泊松比为0.31,其压电应变常数矩阵(单位:C/m3)、介电常数矩阵((单位:F/m)和弹性劲度矩阵(单位:N/m2)分别为:
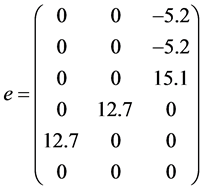 ,
,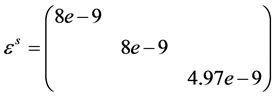 ,
,
3.1. 定子谐响应分析
通过谐响应分析,研究定子振动特性对频率变化的敏感性,得到不同频率激励下,定子弹性体上各质点纵弯振动的强度,从而定量的分析弹性体振动幅值与频率的关系。根据表1所示的结构尺寸建立有限元模型,按照图3所示的加电方式,在A相和B相上分别施加相位差为90˚且峰值为200 V的交流电压信号,在58.506~60.556 kHz范围内进行谐响应分析,得到定子受交流电压激励时的稳态振动情况。在定子驱动足的表面上任取一点M,用谐响应分析的Full求解法计算出定子驱动足表面质点M在不同频率下的各向振幅如图6所示,其中图6(a)为质点M法向和切向振幅与频率的关系曲线,图6(b)为质点M法向和切向相位与频率的关系曲线。从图6(a)可看到,两相模态的频率差小于100 Hz,但工作频带在500

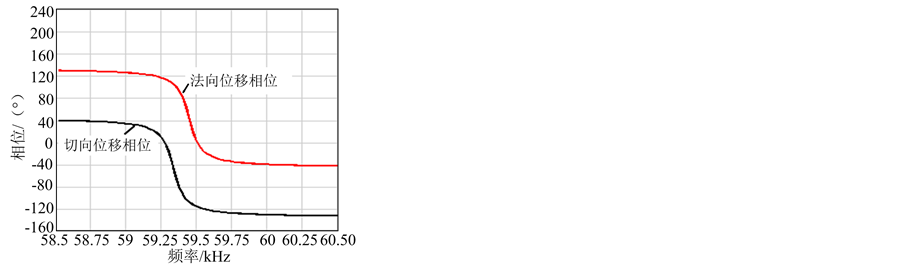 (a) 法向和切向振幅与频率的关系 (b) 法向和切向相位与频率的关系
(a) 法向和切向振幅与频率的关系 (b) 法向和切向相位与频率的关系
Figure 6. Amplitude and phase of the stator vs. driving frequency
图6. 定子振幅、相位与频率的关系
Hz以上。在谐振频率59.325 kHz处,切向的振幅最大,达到1.7 μm,在59.425 kHz处,法向振幅最大,达到1.4 μm。且在两相模态的交叉点,法向和切向振幅均达到了1.2 μm。由图6(b)可以看出,法向和切向位移的相位差基本上为90˚。
3.2. 定子瞬态动力学分析
对定子弹性体驱动足表面质点进行瞬态轨迹分析,可以得到驱动足表面质点随时间历程的运动轨迹,了解定子起振过程,为定子的高精度驱动控制提供理论指导。
瞬态动力学分析中需要在压电陶瓷表面施加随时间变化的电压载荷,两片压电陶瓷的极化方向相同,为方便加载,采用在压电陶瓷表面施加频率为59.40 kHz的交流电压激励,施加电压峰峰值为200 V,激励方式为对电机定子A相和B相施加具有90度相位差的交变电压信号时,定子的二阶弯振模态和一阶纵振模态均可被有效激发出来,得到的时间–位移曲线如图7所示。
图7(a)为驱动足表面质点法向振动位移时间曲线,图7(b)为驱动足表面质点切向振动位移时间曲线,图7(c)为驱动足表面质点x-y平面内的运动轨迹,由此可以得到,在两相工作模态被同时激励出来的情况下,可在驱动足表面质点上形成有效的椭圆运动轨迹。由图中可以看出,定子由开始振动到达到稳态具有一定的过程,这一规律对于实现对电机的精密步进控制具有很好的指导意义。
4. 电机实验研究
加工制作了电机样机,电机定子和电机实物图如图8。定子的重量为18克,封装后的电机定子外形尺寸长55 mm,宽26 mm,高14 mm。
4.1. 定子定频试验
应用PSV-300F-B型多普勒激光测振仪,对电机定子进行了频率响应实验和定频测试。通过定子扫频测试,二阶弯曲振动被激发出来的频率为54.58 kHz,,一阶纵振被激发了出来的频率为55 kHz。由于定子底部的压电陶瓷以极化方向相反的方式粘贴,故当在两片压电陶瓷上施加同相信号时,可把定子的二阶弯振有效激发出来。图9为在不同激励频率下的定子驱动足振幅变化曲线。
在激励电压峰峰值为200 V,且激励频率在54.58 kHz时,定子驱动足上x方向的振幅最大,达到了为0.75 μm。故当在两片压电陶瓷上施加反相信号时,可把定子的一阶纵振有效激发出来。在激励电压峰峰值为200 V,激励频率为55 kHz时,定子驱动足上的y向振幅达到了0.8 μm。为了兼顾定子在两个工作模态都被有效的激发出来,选择两者中间的一个频率54.79 kHz进行驱动,定子驱动足上的振幅均接近
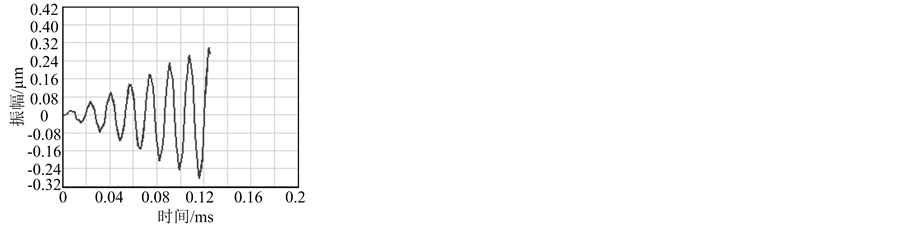
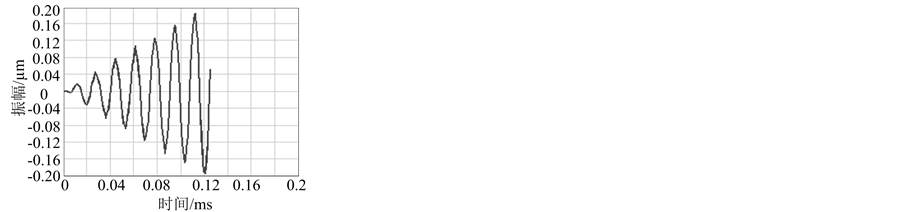
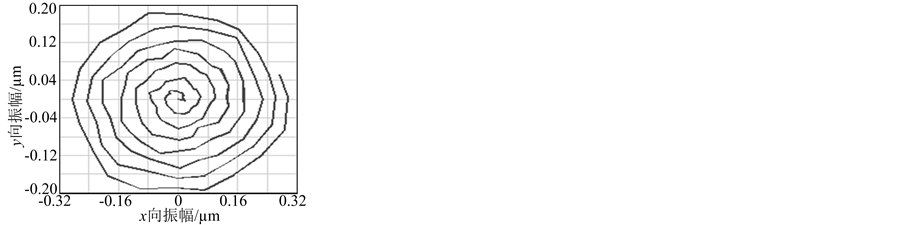 (a) 法向时间-位移曲线 (b) 切向时间-位移曲线 (c) x-y平面内运动轨迹
(a) 法向时间-位移曲线 (b) 切向时间-位移曲线 (c) x-y平面内运动轨迹
Figure 7. Motion trajectory of the stator driving foot surface particle
图7. 定子驱动足表面质点运动轨迹
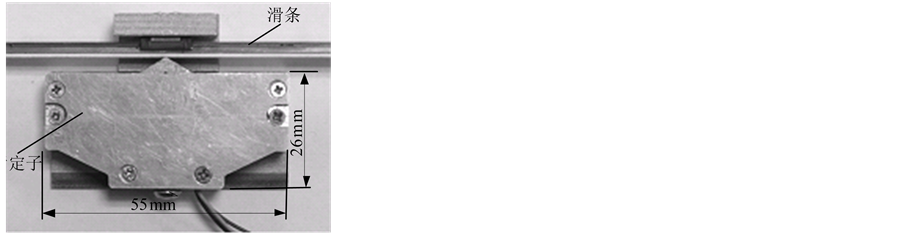
Figure 8. Prototype of the motor
图8. 电机实物图
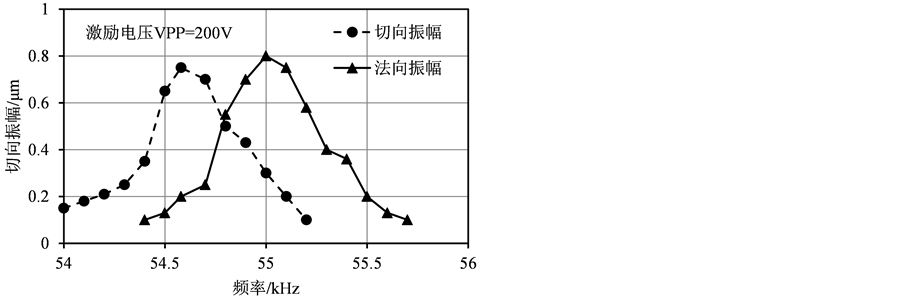
Figure 9. Amplitude of the driving foot vs. driving frequency
图9. 定子驱动足振幅VS驱动频率
0.5 μm。很显然,当以靠近二阶弯振模态的频率进行激励时,定子驱动足y方向振幅也达到了0.4 μm,满足驱动的要求,故在此频率驱动时,使得动子获得较大的速度;当以靠近一阶纵振模态的频率进行激励时,定子驱动足上x方向的振幅也达到了0.5 μm,故可使得动子获得较大的输出力。
4.2. 预压力对定子频率特性的影响
对于定子而言,无论是理论计算还是扫频测试、定频测试,均是在自由–自由状态下进行的,而电机定子实际工作时,定、动子之间要施加一定的预压力,这无疑会对定子的边界条件产生一定的影响。为了解定子在一定预压力下,模态频率的变化情况,对预压力与定子的两种振动模态频率的关系进行了测试,如图10所示。从图中可以看出:随着预压力的增大,两种工作模态的频率也增大。值得注意的是,
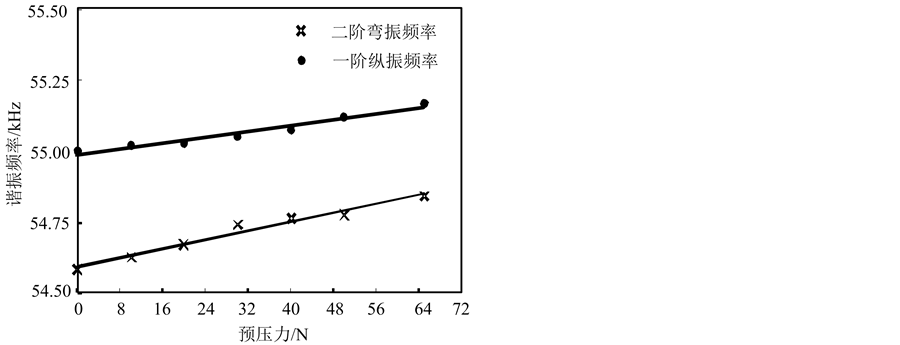
Figure 10. Influence of the preload on resonance frequency of the stator
图10. 预压力对定子共振频率的影响
振动模态频率随预压力增长而增加的程度并不相同:当预压力较小时,这两种振动模态频率随预压力的变化较为明显;而预压力较大时,它们的变化程度放缓而逐渐趋于平稳。
由图10可知,尽管定子两个工作模态的频率会随着预压力的增大而升高,但它们升高的幅度很小且两者的变化程度相当,它们的频率差值变化不大。因此,在预压力作用下的定子仍然具有较好的频率一致性。
4.3. 驱动电压信号对电机速度的影响
在驱动电压峰峰值为400 V,相位差为90˚,预压力为24 N的条件下,电机定子和动子之间采用了陶瓷–不锈钢摩擦副进行试验,其速度–频率特性曲线如图11所示。在驱动频率为54.7 kHz时,电机的速度最大,为211 mm/s。图12为电机在驱动频率为54.7 kHz,预压力为24 N,不同的激励电压幅值情况下,电机的速度变化情况。由图中可以看出,电机存在一个速度死区,在0~100 V时,电机基本上不动,在超过100 V时,电机才有所响应,且随着激励电压幅值的增加,电机的速度基本上也是线性增加的,在激励电压峰峰值为400 V时,电机的速度达到211 mm/s。同时在实验中发现,随着电压的持续增加,电机的速度还能够上升,但电机的发热情况比较严重,故在电机实际运行时,应把电压控制在合适的范围内。
4.4. 预压力对电机机械特性的影响
由上文可知,预压力对电机定子的谐振频率产生了一定的影响,同时,也会对定子驱动足上的法向振幅和切向振幅产生影响,这必然会对电机的机械特性产生影响。
在驱动频率为55 kHz,驱动电压峰峰值为400 V时,不同的预压力情况下,电机的机械特性曲线和效率曲线如图13和图14所示。显然,随着预压力的增大,电机的空载速度降低,电机的最大推力增大,且电机的机械特性变硬。在预压力为24 N时,电机的最大推力为2.5 N,推重比达到了14:1,最大效率达8%。
5. 结论
本文提出一种新型的基于面内模态的直线超声电机,利用二阶弯振模态和一阶纵振模态作为工作模态,同时利用三角位移放大结构,把纵向振动所产生的水平方向位移转化为驱动足上垂直方向上的位移

Figure 11. Velocity of the motor vs. different driving frequency
图11. 电机速度VS不同驱动频率
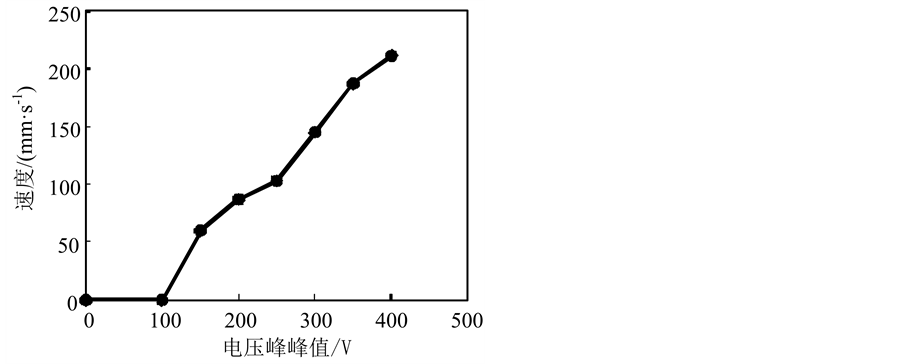
Figure 12. Velocity of the motor vs. driving voltage
图12. 电机速度VS驱动电压
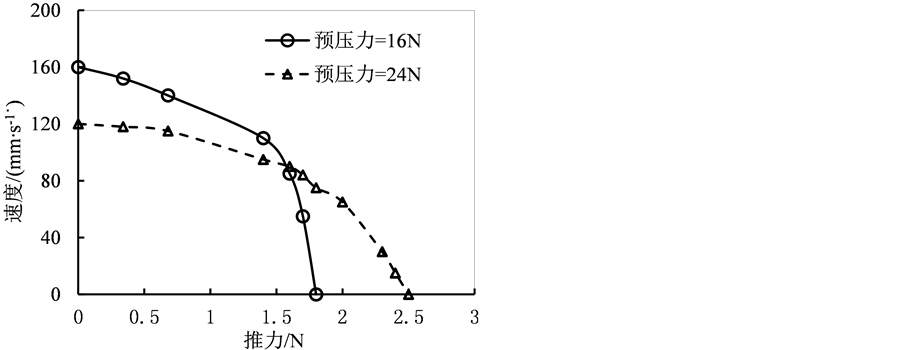
Figure 13. Characteristics curve of the motor under different preload
图13. 不同预压力下的电机特性曲线
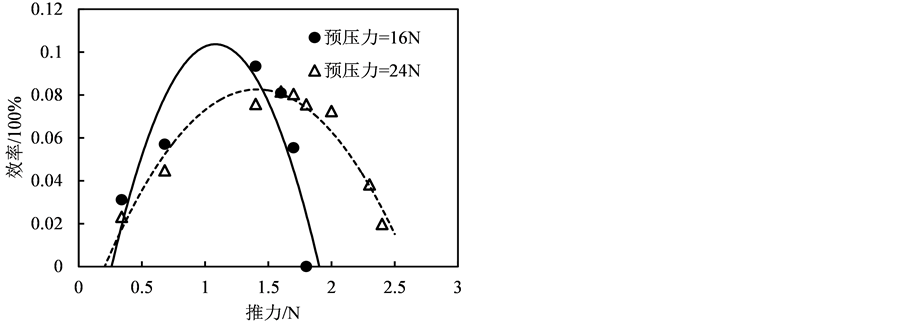
Figure 14. Efficiency curve of the motor
图14. 电机效率曲线
并放大。采用有限元分析方法,对电机定子进行了动力学分析。验证了驱动足表面质点椭圆运动轨迹的形成过程。加工制作了电机样机并进行了系统的试验研究,对定子进行了频响测试和定频测试、预压力对定子工作频率的影响测试、电机速度频率关系、电压速度关系、负载特性关系测试。在预压力为24 N时,电机的最大推力为2.5 N,电机的最大空载速度为120 mm/s,推重比达到了14:1,最大效率达8%。
基金项目
国家自然科学基金重点项目(51275235);江苏高校优势学科建设工程资助项目。
文章引用
时运来,张 军,冯 森,李 波, (2014) 一种新型面内模态直线超声电机的驱动机理及试验研究
Research on the Driving Mechanism and Experiment a Novel Linear Ultrasonic Motor Based on In-Plane Modes. 声学与振动,04,29-37. doi: 10.12677/OJAV.2014.24004
参考文献 (References)
- 1. Hemsel, T. and Wallaschek, J. (2000) Survey of the present state of the art of piezoelectric linear motors. Ultrasonics, 38, 37-40.
- 2. Spanner, K. (2006) Survey of the various operating principles of ultrasonic piezomotors. White paper for actuator 2006.
- 3. Bansiavichus, R. (1977) UdSSR Patent, No.693493.
- 4. Takano, T. and Tomikawa, Y. (1989) Linearly moving ultrasonic motor using a multi-mode vibrator. Japanese Journal of Applied Physics, 28, 164-166.
- 5. Tomikawa, Y., Takano, T. and Umeda, H. (1992) Thin rotary and linear ultrasonic motors using double-mode piezoelectric vibrator of the first longitudinal and second bending modes. Japanese Journal of Applied Physics, 31, 3073-3076.
- 6. Aoyagi, M., Tomikawa, Y. and Takano, T. (1992) Ultrasonic motors using longitudinal and bending multi-mode vibrators with mode coupling by externally asymmetry or internal nonlinearity. Japanese Journal of Applied Physics, 31, 3077-3080.
- 7. Funakubo, T., Tsubata, T., Taniguchi, Y., Kumei, K., Fujimura, T. and Abe, C. (1995) Ultrasonic linear motor using multilayer piezoelectric actuators. Japanese Journal of Applied Physics, 34, 2756-2759.
- 8. Sigoh, H., Kawasaki, M., Maruko, N. and Kanayama, K. (1995) Multilayer piezoelectric motor using the first longitudinal and the second bending vibrations. Japanese Journal of Applied Physics, 34, 2760-2764.
- 9. Zumeris, J. (1994) European Patent Application, EP 0663616A2.
- 10. Wishnewskiy, W. (1999) Of-fenlegungsschrift 19938954.
- 11. Wishnewskiy, W. (2002) US Patent, 20030052573A1.
- 12. Wishnewskiy, W., Ko-valev, S. and Vyshnevshyy, A. (2004) New ultrasonic piezoelectric actuator for nanopositioning. Actuator, Bremen.
- 13. 许海, 李洁, 赵淳生 (2005) 双足型直线超声电机的设计与实验. 中国机械工程, 3, 243-245.
- 14. 时运来, 李玉宝, 赵淳生 (2008) 基于面内模态的直线超声电机的优化设计. 中国电机工程学报, 30, 56-60.