Geomatics Science and Technology
Vol.2 No.02(2014), Article ID:13347,4 pages
DOI:10.12677/GST.2014.22003
Study of the Monitoring and Warning System for Metro Deformation in Zhujiang New Town Guangzhou and Its Applications
Longchang Liang, Lingyan Lu, Zhiyu Qiu
Guangdong Nonferrous Metals Engineering Investigation Design Institute, Guangzhou
Email: 416854154@qq.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Feb. 24th, 2014; revised: Mar. 18th, 2014; accepted: Mar. 26th, 2014
In this paper, we use high-precision mobile robots to automatically and periodically monitor the deformation of Metro tunnel in Guangzhou Zhujiang New Town. We investigate the monitoring network design, monitoring methods, data processing and the corresponding applications. This investigation is applicable to similar monitoring projects.
Keywords:Metro Deformation Monitoring, Datum Network, Georobot, Combination Variance of Unit Weight Test, Periodical Monitoring

广州市珠江新城地铁变形监测预警系统的 研究与应用
梁龙昌,卢凌燕,丘志宇
广东有色工程勘察设计院,广州
Email: 416854154@qq.com
收稿日期:2014年2月24日;修回日期:2014年3月18日;录用日期:2014年3月26日

本文针对广州市珠江新城地铁集运隧道段的变形监测项目,采用高精度测量机器人进行移动式自动化周期监测,对监测网设计、监测方法、监测数据处理和应用效果作了较深入的研究,对于类似监测项目具有参考应用价值。
地铁变形监测,基准网,测量机器人,组合后验方差检验法,周期监测

广州地铁集运隧道监测段位于珠江新城珠江大道东与珠江大道西之间区域,占地总面积约6.5万平方米,地下总建筑面积约10万平方米,基坑深达13米,周边是正在建设的高层建筑。隧道段的变形监测的目的在于确定基坑深开挖过程和周围高层建筑建设期间的荷载变化对地铁集运隧道段上行线和下行线的影响情况,为设计施工提供信息服务和安全保障。该项目的位置和竣工后的效果图如图1所示。
地铁变形监测方案设计,主要包括基准点网设计,监测点布设,观测仪器选取,测回数、观测周期数和周期观测时段长的确定等。
2.1. 设计要求
对于地铁集运隧道段的变形监测来说,深基坑开挖、周边高层建筑物建造等荷载的动态作用,对地铁隧道结构的影响大小和规律,是设计人员非常关心的事。设计提出对隧道结构的沉降和水平位移警告值、警戒值和控制值分别为12 mm、15 mm和20 mm;每天的变形量不能超过2.5 mm。当变形量达到其中某一数值时,就需要采取相应措施。为了满足设计要求,首先要确定变形监测的精度,例如:若设计要求监测点的点位精度为1 mm,表示从基准点出发,若对任一监测点做多次重复测量,在点位没有变动的情况下,其点位中误差应小于1 mm。当然,若点位在变动,用此监测精度就能够确定出点位1 mm毫米左右的变化。还有监测点的密度位置和监测周期的要求,如监测断面的间距、每断面的监测点数和位置,一天监测一次还是监测两次、三次?最重要的是需对监测网、点的周期观测值进行分析,提供监测点的周期变形量和累计变形量,分析变形的大小和规律,每天上报。
监测内容主要是施工期间地铁隧道结构变形,通过基准网点和监测点的周期观测,获得监测点的实时坐标,以此来确定隧道结构的变形量。
2.2. 基准点网设计
地铁变形监测与所有工程变形监测相似,都必须建立基准点网。基准点网就是由基准点和工作基点构成的网。根据实际情况和专业知识,设计了如图2所示的监测点网,由基准点和测站点(工作基点)组成,基准点SJ1,SJ2,SJ3,SJ4布设在隧道两侧地质情况良好的地段,测站点SN,SB变形区内。基准点的棱镜固定在强制对中装置上,强制对中装置焊接在三角形铁支架上,通过冲击钻钻孔,用爆炸螺丝将三角形支架固定在隧道洞壁上。在测站点,可将精密全站仪安置在固定在钢架的强制对中装置上,测站点的棱镜则安装在钢架下。
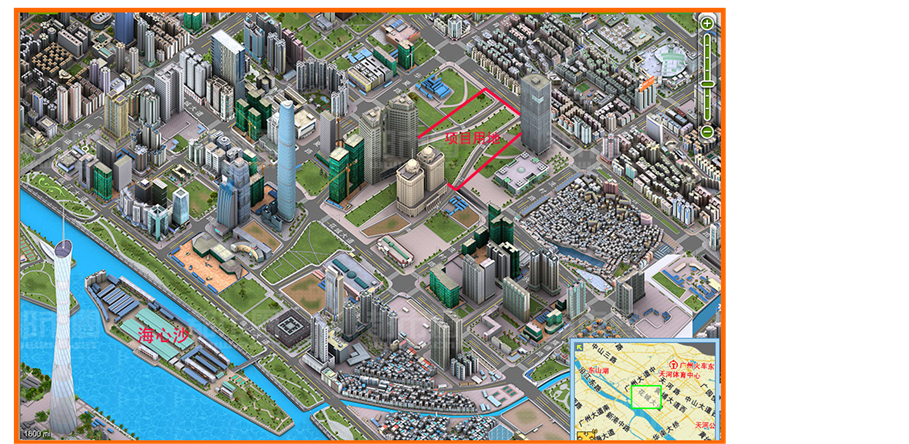
Figure 1. The location and the effect schematic after completion for the project
图1. 项目的位置和竣工后的效果示意图

Figure 2. Schematic diagram for reference points and measuring sites
图2. 基准点和测站点示意图
基准点网为独立网,在基准点上不架设仪器,固定一点一方向,假设SB为已知点,SB到SN为X轴方向,以在SB上观测SN、SJ1、SJ2,在SN上观测SB、SJ3、SJ4。可计算出各基准网点在假设坐标系(称隧道坐标系)下的坐标。在首期,没有多余观测,网的可靠性很差,需要采用多测回(如6测回)和多时段(连续2时段观测,取两时段结果的均值)的方法基准网点的可靠性和精度。
在其后每期的监测中,以首期观测得到的基准点坐标为已知值,进行测站点和变形监测点的观测和坐标计算。先要作要基准点网平差,得到工作基点的实时坐标,在计算监测点的坐标,为了使工作基点的实时坐标不受进行基准点变动的影响,在基准点网平差平差时,須进行基准点的稳定性检验,我们采用了一种“组合后验方差检验法”来判断显著变动的基准点,以稳定的基准点为已知点计算工作基点和变形监测点的坐标。这一方法简单、实用、有效,参见文献[1] ,在此从略。
2.3. 监测点设计
按设计要求在地铁隧道监测段每隔15米进行一个横断面监测,在每个横断面上布设四个监测点。分别位于断面的上下左右,如图3所示。
监测点按断面编号:SA02-1,SA02-2,SA02-3,SA02-4,SA04-1,……。监测点采用徕卡标准棱镜,固定在隧道管片上。通过对监测点的多期观测,可以确定隧道的三维结构变形,如监测点的垂直位移和横向水平位移。在上行线、下行线的两个平行隧道监测段各布设了96个和97个监测点,每天要监测4周期,合计每天要设置16测站,观测772点次。
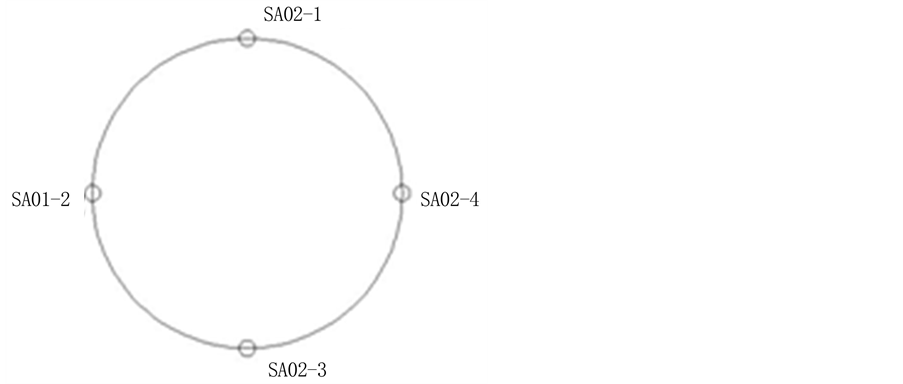
Figure 3. Schematic diagram for the cross-section points of the tunnel
图3. 隧道断面点示意图
测量仪器设备有:徕卡TCA1800测量机器人2台。棱镜205个,温度计、气压计各2个,机器人变形监测自动化软件和内业数据处理软件各两套。采用机器人变形监测自动化监测的作业步骤如下:
连接电脑与全站仪TCA1800,启动自动监测系统软件,在工作基点(如SB)上,瞄准另一基准点SN定向,进行基准点网观测,然后对监测点进行学习测量,并把学习测量结果保存到一个库文件中,第二台仪器在另一工作基点SN同时进行同样观测,以首期得到的基准点坐标为已知值进行基准点稳定性检验和基准点网平差,在已知点中去除有显著变动的基准点,确定工作基点的坐标。以每期工作基点的实时坐标计算各期监测点的坐标。学习测量只需在第一期监测时需要,以后各期可根据监测点的坐标自动按顺序进行观测。
在进行基准网点数据处理时,一般取四个基准网点中的两个基准网点做基准,此时网中只有一个多余观测,所以在四个基准网点中任取其中两个进行平差,比较后验单位权方差,取权小的作为基准,得出其它两点基准坐标。但是SJ1与SJ2离得很近,SJ3与SJ4也离得近,不能用这两组点作基准。
基准点网观测8个测回;全部监测点分成两组,在每个工作基点上各观测一组,监测点观测3个测回。使用自动监测系统软件,可以大大提高监测效率,每期观测时,只需事先设定好观测时间段、观测周期和监测点组,点击自动测量,即可进行自动观测。上行线和下行线各有96个和97个监测点,每期监测时间不到70分钟,一天最多监测达4期,全部时间约5小时。
基准点网基准点稳定性检验和平差、监测点变形分析和提交监测报表报告是地铁变形监测中每天必须做的事情。
内业数据处理使用科傻网平差系统和测量机器人变形监测内业软件系统(参见文献[2] ),可方便地得到基准网点的坐标,监测点的坐标,进行叠值分析得出各期变形量和累计变形量,还可以得到每个点上直观的二维或三维图。
如下行线的编号为XA45断面上,监测点在Y方向的变形过程曲线如图4所示,从第一期到第81期其变形都很小,由于地铁施工原因,在81期以后,重新进行分期,在Y方向累计变形最大值为−4 mm,
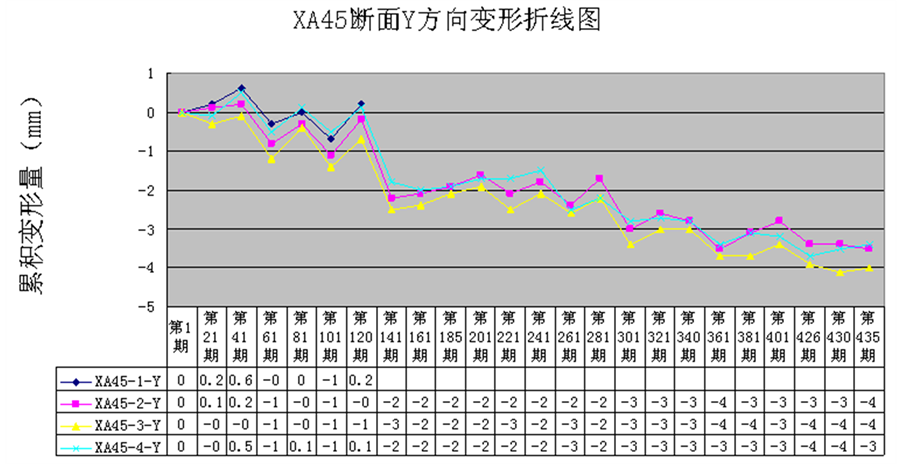
Figure 4. The procedure curve of deformation for the XA45 cross section in Y direction
图4. XA45断面在Y方向的变形过程曲线
有一种趋势性的变形,初步推断是隧道周边高层建筑的荷载造成,但变形缓慢,变形量在可控范围,随着时间的推进,逐渐放慢,对隧道安全不造成影响。
同样,可绘制沉降变形过程曲线图,由各断面监测点的沉降变形过程曲线看,隧道主体结构随基坑开挖,因荷载变小有缓慢上升,但越来越小。同时,也随基坑周边高层建筑物的修建,荷载的增加而有微小的下沉,通过高精度测量机器人的密集周期监测,监测出了这种微小的变化。
根据各点的周期监测成果,可以进行建模分析和变形预报,通过变形过程曲线就能清楚地看出变形情况和趋势,由于变形远小于设计的警告值,所以建模分析和变形预报只是一种锦上添花而已。
监测单位每天均用电子邮件向建设单位提供每天各次变形量、累计变形量和简单的分析报告。每周用报表形式向监理单位、建设单位等提供本周的变形量、累计变形量、变化曲线图和变形分析报告。
本项目从2009年9月5日开始到2010年5月6日结束,最后提交有隧道变形监测技术报告,原始观测成果,基准点网和监测点平面位置示意图,各监测点的X、Y、Z坐标变形过程曲线和变形分析结果。
针对广州市珠江新城地铁集运隧道段的变形监测项目,本文总结了用高精度测量机器人进行移动式自动化周期监测的方案设计、外业流程和数据处理方法,通过几个月的实时变形监测不仅满足设计的精度要求,提高了监测效率,也保证了地铁在施工期间的安全,为设计积累了宝贵的资料。实践证明,根据实际所作的地铁集运隧道段的变形监测具有先进性、实用性、有效性和推广价值。
- [1] 张正禄, 沈飞飞, 等 (2011) 地铁隧道变形监测基准网点确定的一种方法. 测绘科学, 4, 98-99.
- [2] 梅文胜, 张正禄 (2002) 测量机器人变形监测软件系统研究. 武汉大学学报(信息科学版), 2, 165-171.