Geomatics Science and Technology
Vol.05 No.01(2017), Article ID:19509,7
pages
10.12677/GST.2017.51001
The Application of Mobile LiDAR System in Geological Disaster Monitoring
Yikai Kang
The Third Institute of Surveying and Mapping of Hebei Province, Shijiazhuang Hebei

Received: Dec. 20th, 2016; accepted: Jan. 8th, 2017; published: Jan. 12th, 2017
Copyright © 2017 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
In this paper, using mobile measurement technology, combined with unmanned aerial photography system, we select a variety of types of geological disasters to carry out daily monitoring application exploration. Through the comprehensive analysis of the point cloud data and image data after processing, the purposes of geological disaster monitoring, early warning and emergency treatment are reached. Through the application of this technology, it can help the geological disaster monitoring, early warning and decision-making of emergency treatment, play the role of disaster early warning and emergency relief support, and give full play to the role of surveying and mapping in economic and social development.
Keywords:Geological Disasters, Mobile Measurement System, LiDAR, Slides, Debris Flow, Collapse

移动LiDAR系统在地质灾害监测中的应用
康义凯
河北省第三测绘院,河北 石家庄

收稿日期:2016年12月20日;录用日期:2017年1月8日;发布日期:2017年1月12日

摘 要
本文利用移动测量技术,结合无人机航摄系统,选择多种类型的地质灾害开展日常监测应用探索。通过对现场获取的点云数据和影像数据的加工处理后的专题成果进行综合分析,达到地质灾害监测、预警和突发事件快速处理的目的。通过本文技术的应用,可以为地质灾害的监测、预警和突发事件的处理决策提供帮助,起到灾害预警和应急救灾保障作用,充分发挥了测绘在经济社会发展中的作用。
关键词 :地质灾害,移动测量系统,LiDAR,滑坡,泥石流,塌陷

1. 绪论
地质灾害隐患点严重威胁着人民群众的生命财产安全和社会经济的可持续发展。为了应对面对日益突出的地质灾害,必须构建应急测绘保障体系,提高地理信息数据快速获取能力,使其具备实时、全面、准确等实用特性 [1] 。但常规测量手段受环境、技术、机动性和时效性等因素限制 [2] ,无法满足管理部门随时、精确监测的需求,无法快速采集精确多维信息。采用移动测量技术可以快速获取真三维数据,并对其进行综合管理 [3] ,是目前最合适开展地质灾害隐患点地理信息数据快速获取的理想手段。
2. 技术方法
利用移动LiDAR系统在车辆的行进之中,通过激光扫描仪和数码相机相结合的方式快速获取灾害点区域的点云数据和影像数据,经软件编辑处理后形成所需的数字三维高程模型(DEM)和DOM影像成果 [4] [5] [6] ,向管理提供地质灾害点区域多种类型高精度的地理信息成果。
在河北省邢台、临城两县选择18个不同类型的地质灾害隐患点作为试点区域,开展基于移动LiDAR系统进行地质灾害监测的试验性研究。试点区域地质灾害隐患点类型多样,非常具有代表性,18个地质灾害隐患点的具体情况如下表1所示。
试验区开展三个轮次的数据采集工作,每个轮次间隔3个月,将三个轮次得成果进行叠加比对和统计分析,对被监测的地质灾害隐患点的基本情况和风险度做出正确的评估,向政府决策部门提供科学的报告。
考虑到地质灾害隐患点交通状况较差,为弥补移动测量车扫描范围不能完全覆盖的缺陷,还采用了单点三维激光扫描结合无人机航摄系统协同作业的技术方案 [7] [8] [9] ,不仅解决了移动测量系统激光点云数据覆盖的难题,还额外获取了航摄影像资料,使得地质灾害隐患点的地理信息数据类型更加丰富,可以最大程度掌握灾害隐患点的特征。
3. 数据后处理与专题成果制作
外业数据采集完成后,工作人员对原始点云数据进行处理,包括以下几个方面:
Ø 三维激光扫描站点成果拼接;
Ø 坐标系转换;
Ø 噪声剔除;
Ø 点云数据导出;
Ø 三维素模提取。

Table 1. Basic situation of geological hazard points
表1. 地质灾害隐患点基本情况表
点云数据处理结束后,利用获取的地质灾害隐患点的点云数据,制作地质灾害隐患点专题成果,包括1:2000数字高程模型、1:1000数字正射影像图、1:1000数字线划图等。
1) 快速建模
快速建模是利用点云间的拓扑关系及彩色点云所对应照片信息,把相邻点云自动构网并自动提取照片像素信息自动形成纹理 [10] ,从而实现自动快速模型。
2) DEM提取
通过对激光点云的滤波,实现了提取地面点,然后再按一定步距插值到得DEM [11] 。实际应用中我们采用多次三角形迭代方式技术,并通过反距离内插求得DEM。
3) 数字正射影像图制作
利用车载数码相机同步拍摄的影像成果,结合激光点云数据制作高分辨率高精度数字正射影像图 [12] 。
4) 制作数字线划图
利用DEM、DOM成果,按照先内后外的原则,经内业采集、外业调绘和地图编辑,制作1:1000数字线划图制作。
如下图1所示为利用获取的地质灾害隐患点的点云数据和影像数据经过加工处理后,生成主要的专题成果。
4. 监测系统设计
为了将地质灾害隐患点多期监测的数据进行有效管理,利用制作的专题地理信息成果进行综合分析,




Figure 1. Automatic fast model, 3D terrain halo, digital orthophoto and digital line graph
图1. 自动快速模型、三维地形晕宣、数字正射影像图和数字线划图
我们基于ArcEngine10.2和SQLServer2008数据库,利用C#语言开发了“地质灾害监测点数据管理”系统,包括数据输入、管理、检查点二维三维显示、多期数据比较分析、监测点变化状况、地质灾害点定位等功能。在此基础上集成地质灾害隐患点的点云成果、专题地理信息成果、GPS观测成果和地面模型等成果建立地理信息数据库,实现了地质灾害隐患点的查询、浏览、预警分析等管理功能。
利用地质灾害监测点数据管理系统,通过获取的三轮地质灾害隐患点监测数据,计算监控点的数据变化值,分析各灾害隐患点的变化幅度和趋势,编制完成监测报告,为地质灾害的预防、整治和应急预案等提供准确的数据和科学的支撑。
5. 结果分析
通过对18个地质灾害隐患点的监测数据进行分析,发现18个地质灾害隐患点均存在不同程度的地质变化,下面以两个变化明显的地质灾害隐患点为例进行分析。
5.1. 驾游白云寺北沟地质灾害点位
驾游白云寺北沟地质灾害点位于临城县赵庄乡驾游村白云寺的东北部,气候类型为暖温带大陆性季风气候,降水量集中在夏季。
该灾害点地处山区,地貌类型以山地为主,且没有较大河流,如果发生大暴雨或持续降雨,该地易生中规模的泥石流。
该地质灾害监测区数据获取采用激光扫描与GPS网相结合的方式,布设监测基准点三个,地质灾害监测点12个,通过三轮监测数据分析对比,结果如表2。
由表格中第一轮、第二轮地质灾害监测成果对比可以看出,水平方向的平移量较小,监测点的水平方向变化量均在1.9 cm以下;垂直方向上,监测区域监测点的高程值略有升高,IV07号点升高最多,上升量为0.8 cm,其余11个监测点变化量在−1.3 cm~0.7 cm之间,整体平均降低0.5 cm。由第二轮、第三轮地质灾害监测成果对比可以看出,12个监测点在水平X方向上产生了平均值为−2.1 cm的平移,水平
Table 2. Analysis and comparison of the monitoring points of geological hazards in Beigou of Baiyun Temple in Jiayou Village
表2. 驾游村白云寺北沟地质灾害监测点监测分析对比表
平移整体变化量在0 cm~3.5 cm;垂直方向上,第三轮比第二轮监测高程值有明显减小,高程减小平均值为3.9 cm,其中IV06点高程减小值为5.6 cm。由第一轮、第三轮地质灾害监测成果对比可以看出,监测点在水平X方向上产生了平均值为−2 cm的平移,水平方向的平移变化量在0 cm~3.1 cm;垂直方向上,第三轮比第一轮测量高程值有明显减小,12个监测点降低的平均值为4.27 cm,其中IV06、IV08和IV10点的降低量达到4.9 cm。
此外对驾游村白云寺北沟的总体位移进行分析,12个灾害监测点第一轮与第二轮、第二轮与第三轮变化对比结果如下图2所示。
5.2. 穆扣村北坡地质灾害点
穆扣村北坡地质灾害点分为两部分,分别位于邢台县冀家村乡穆扣村的北部和西南部,属于山区,海拔较高。由于山地地形,加上暖温带大陆性季风气候,全年降水量集中在夏季,如果发生大暴雨或持续降雨,该地易生小规模的泥石流。穆扣村布设监测基准点三个,地质灾害监测点12个,通过三轮监测数据分析对比,结果如表3。
由第一轮、第二轮地质灾害监测成果对比发现,水平方向的平移变化量较稳定,监测点变化量0.3 cm~1.4 cm之间;垂直方向上,监测点的高程值略有降低,平均变化量为0.3 cm。由第二轮、第三轮地质灾害监测成果对比发现,水平方向的最小平移量为0.3 cm,最大平移量为4.6 cm;垂直方向上,监测点的高程值有升高也有降低,升高量在1.7 cm~3.1 cm之间,降低量在0.5 cm~2.9 cm之间。由第一轮、第三轮地质灾害监测成果对比发现,水平方向平移量平均为1.7 cm,最大变化量为4.0 cm;垂直方向上,监测点的高程值有升高也有降低,升高量在0.3 cm~2.9 cm之间,降低量在0.2 cm~4.0 cm之间。
对穆扣村北坡的总体位移进行分析,12个灾害监测点第一轮与第二轮、第二轮与第三轮变化对比结果如图3所示。
6. 结论与展望
利用移动测量技术、地面三维激光扫描和无人机航测系统以其机动、灵活的特点,能够在灾害发生后实现第一时间获取灾害现场数据,不仅可以快速获取、处理并提供相应的地理信息成果,而且获取的地质灾害隐患点的地理信息数据类型更加丰富,可以最大程度掌握灾害隐患点的特征,为灾后的救援、决策及对灾区的损失评估提供科学依据。同时可以对地质灾害隐患点进行日常监测,通过地形变化对比
Table 3. Analysis and comparison of the monitoring points of geological hazards on the northern slope of Mukou Village
表3. 穆扣村北坡地质灾害监测点监测分析对比表
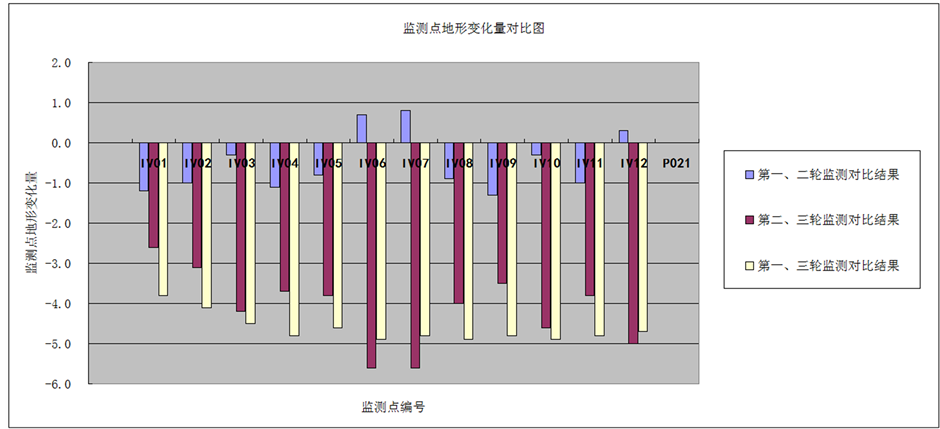
Figure 2. Comparison of terrain variation at monitoring in Beigou of Baiyun Temple in Jiayou Village
图2. 驾游村白云寺北沟监测点地形变化量对比
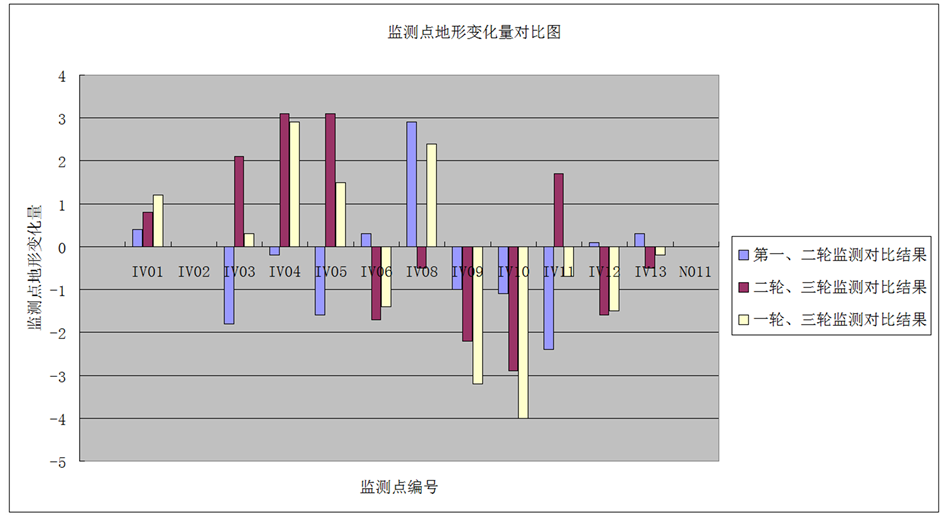
Figure 3. Comparison of terrain variation at monitoring point on the northern slope of Mukou Village
图3. 穆扣村北坡监测点地形变化量对比图
分析,实现灾害隐患点变化预警。使得地质灾害监测的可靠性与精度也得到了提高,对于分析监测滑坡、塌陷、泥石流等灾害发生具有重要意义。
文章引用
康义凯. 移动LiDAR系统在地质灾害监测中的应用
The Application of Mobile LiDAR System in Geological Disaster Monitoring[J]. 测绘科学技术, 2017, 05(01): 1-7. http://dx.doi.org/10.12677/GST.2017.51001
参考文献 (References)
- 1. 梁欣廉, 张继贤, 李海涛, 等. 激光雷达数据特点[J]. 遥感信息, 2005, 2005(3): 71-76.
- 2. 张剑清, 潘励, 王树根. 摄影测量学[M]. 武汉: 武汉大学出版社, 2003.
- 3. 李德仁. 移动测量技术及其应用[J]. 武汉: 地理空间信息, 2006.
- 4. 张小红. 机载激光雷达测量技术理论与方法[M]. 武汉: 武汉大学出版社, 2007.
- 5. 邹晓军. 摄影测量与遥感[M]. 北京: 测绘出版社, 2011.
- 6. 张卡, 盛业华, 叶春, 梁诚. 车载三维数据采集系统的绝对标定及精度分析[J]. 武汉: 武汉大学学报(信息科学版), 2008, 33(1): 55-59.
- 7. 杨兆瑛. 可移动升降式全景采集平台设计与实现[D]: [硕士学位论文]. 北京: 北京建筑大学, 2014.
- 8. 王留召, 韩友美, 钟若飞. 车载激光扫描仪距离测量参数标定[J]. 北京: 测绘通报, 2010, 2010(1): 19-20.
- 9. 杨兆瑛. 可移动升降式全景采集平台设计与实现[D]: [硕士学位论文]. 北京: 北京建筑大学, 2014.
- 10. 马立广. 地面三维激光扫描仪的分类与应用[J]. 北京: 地面空间信息, 2005, 3(3): 60-62.
- 11. 邓非. LIDAR数据与数字影像的配准和地物提取研究处理方法的研究[D]: [学士学位论文]. 武汉: 武汉大学, 2006.
- 12. 房延伟. 三维激光扫描技术在地籍测绘中的应用[D]: [硕士学位论文]. 长春: 吉林大学, 2013.