Advances in Applied Mathematics
Vol.
11
No.
12
(
2022
), Article ID:
58884
,
18
pages
10.12677/AAM.2022.1112900
基于驻留时间的切换复杂网络的降阶估计
张亚平,张梦瑶
上海理工大学理学院,上海
收稿日期:2022年11月7日;录用日期:2022年12月1日;发布日期:2022年12月9日

摘要
研究一类离散时滞非线性切换复杂网络的降阶
-
状态估计问题。通过引入辅助变量,提出了一种新的模型化简方法,该方法用测量输出表示直接观测状态,通过设计降阶估计器估计不可测状态。利用平均驻留时间法和李雅普诺夫稳定性理论,给出了一个既保证估计误差系统指数稳定性又保证估计误差对外生干扰的
-
性能水平的充分条件。降阶估计器增益通过求解一组线性矩阵不等式得到。最后,通过数值仿真验证了理论结果的有效性,并通过对比实验验证了所设计估计器的阶数对估计精度的影响。
关键词
复杂网络,
-
性能,平均驻留时间,状态估计,模型降阶,切换拓扑

Reduced Order Estimation of Switching Complex Networks Based on Dwell Time
Yaping Zhang, Mengyao Zhang
College of Science, University of Shanghai for Science and Technology, Shanghai
Received: Nov. 7th, 2022; accepted: Dec. 1st, 2022; published: Dec. 9th, 2022

ABSTRACT
In this paper, the
-
reduced-order state estimation problem is investigated for a class of discrete time-delayed nonlinear switched complex networks. By introducing an auxiliary variable, a new model reduction method is proposed where the directly observed state can be represented by the measurement output and the unmeasured state is estimated by designing a reduced-order estimator. With the help of the average dwell time method and the Lyapunov stability theory, a sufficient condition is presented to guarantee both the exponential stability of the resulting estimation error system and a prescribed
-
performance level of the estimation error against exogenous disturbances. The desired reduced-order estimator gains are acquired in terms of the solution to a set of linear matrix inequalities. Finally, a numerical simulation is given to illustrate the usefulness of the proposed theoretical results and some comparative experiments are made to show the impact of the order of the designed estimator on the estimation accuracy.
Keywords:Complex Networks,
-
Performance, Average Dwell Time, State Estimate, Model Reduction, Switched Topology

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在过去的几十年里,复杂网络已经渗透到各个领域。许多自然和人工系统可以被视为复杂网络,其中包括但不限于万维网、细胞和代谢网络、技术网络、社会网络和基因网络,参见 [1]。众所周知,一个复杂的网络是由大量的节点和边组成的,分别代表个体和按照某种拓扑结构的网络连接。为了揭示复杂的耦合关系,复杂网络的每个节点通常被看作一个微分或差分方程表征的动力学单元。在此背景下,人们提出了各种复杂网络模型,包括时滞复杂网络、随机复杂网络、切换复杂网络和通信资源有限的复杂网络。在这些模型的基础上,人们对复杂网络的动力学分析进行了大量的研究,如稳定性、同步、控制和状态估计等 [2]。
对于复杂网络的同步与控制问题,一个隐含的条件是能够获得关于网络状态的准确信息。然而,在实际应用中,由于不可避免的建模误差、干扰和拓扑结构变化等因素,往往导致可测信息与真实状态存在明显差异。为此,复杂网络的状态估计问题一直是一个基础且有前景的问题,吸引了信号处理、控制工程和网络技术领域的大量研究关注 [3] [4]。目前已经提出了多种估计策略,如卡尔曼滤波 [5],H2滤波 [6],H∞滤波 [7] [8],
-
(离散时间系统的
-
)滤波 [9] [10]。需要指出的是,在各种滤波策略中,旨在将滤波误差限制在能量峰值范数 [11] 指定的范围内的滤波受到了特别的关注,见 [12]。
对于复杂网络的状态估计问题,现有的研究成果大多针对的是全阶估计器。然而,值得注意的是,由于复杂网络的大规模性质,这些方法/技术的使用不可避免地导致巨大的计算负担。为此,降阶估计器被认为是降低估计量和计算复杂度的有效方法,其主要思想是寻找一个低维估计器来估计高维系统状态。近年来,降阶估计问题得到了越来越多的研究兴趣 [13] [14]。
在现有的大多数关于复杂网络的文献中,一个保守的假设是网络拓扑是固定的。但在真实的网络中,由于外部环境和内部因素的影响,这样的假设是不现实的,即网络的连接拓扑可能会发生变化。例如,网络中的某个设备节点可能会因没电或损坏而无法正常工作。此外,具有时变拓扑结构的复杂网络一直是一个热门的研究课题,已有相当多的研究成果,如 [15] [16] [17] 及其参考文献。例如,在 [17] 中讨论了具有切换拓扑的复杂动态网络的同步问题。在 [16] 中,采用平均驻留时间(ADT)方法解决了具有切换拓扑的传感器网络的分布式状态估计问题。
基于上述分析,本文首次研究了一类离散时间切换复杂网络的降阶状态估计问题。更确切地说,设计了一个降阶状态估计器,使估计误差保证是指数稳定的,并借助李亚普诺夫稳定性理论和ADT技术以及线性矩阵不等式得到估计器的增益。这是一个开放而富有挑战性的问题,值得认真考虑,面临以下挑战/困难:1) 如何建立一个全面的模型来描述具有时变延迟和切换拓扑的复杂动态网络?2) 如何建立构造降阶估计器的理论框架?3) 如何设计切换信号的ADT以保证误差系统的指数稳定性?为了解决前面讨论的困难,本文的主要贡献如下:
1) 考虑的复杂网络模型综合了非线性、切换拓扑和时变时滞,更接近工程实际,并且考虑在很多工程应用中对滤波误差的峰值有度量要求,本文采用滤波,可以保证滤波误差的峰值低于一定水平;
2) 首次研究了复杂切换网络的降阶问题,通过引入辅助变量并进行线性变换,建立了构造降阶估计器的理论框架;
3) 利用ADT技术和Lyapunov稳定性理论,在保证性能约束下,给出了保证估计误差系统指数稳定的充分条件。
2. 问题描述
考虑以下一类由N个耦合节点组成的时滞复杂切换动态网络:
(1)
对于
,其中
为状态变量,
为表示第i个网络节点的测量输出,
为待估计的信号。
为属于
的外生干扰。
为切换信号。
为表示网络耦合强度和拓扑结构的外耦合矩阵,
如果节点i和节点j之间存在连接
,则
。同时,矩阵
的对角元素满足
。
表示内部耦合矩阵。
表示满足
的时变时滞;
和
是
已知常数。
和
是已知的具有适当维数的矩阵。
对于非线性函数
和
,作如下假设。
假设1:在(1)中对于所有
和
非线性函数
, →满足
(2)
对于系统(1),假设
(3)
那么系统矩阵和系统状态可以分为以下几种形式:
其中
,,,以及
。
注1:值得强调的是,(3)式的
结构具有普遍性。事实上,只要
是满秩的,通过Schmidt正交化就可以转化为式(3)的形式。更具体地说,受 [18] 的启发,由于
是满秩的,可以利用Schmidt正交化得到
的正交矩阵
。那么,存在一个可逆矩阵
,满足
和
。同样,也不难看出
和
。通过输出变换
,(1)中的输出方程由
转换为
。接下来,将
展开为正交矩阵
。然后,通过状态转换
,
得到
,其中
。因此,很容易推导出
。
借助矩阵克罗内克积,将系统(1)重新改写为:
(4)
其中
以及
从(4)可以看出,
可以直接从输出
中得到,
是待估计的不可测状态。因此,在后续中,主要注意力集中在
的估计器的设计上。为此,引入一个新的变量
和一个新的矩阵
,其形式如下:
(6)
其中
是所求的增益。
然后,通过进行线性变换
可以得到
(7)
通过一些简单的计算,由(4)-(7)可以推断出
(8)
由上述分析可以得出
和
之间的线性关系已经建立。因此,只需要构造
的估计。进而,基于方程(8),可以设计以下降阶状态估计器:
(9)
其中
及
分别是
以及
的估计。
是需要设计的估计器增益。
定义
,以及
结合(4)~(9)得到以下估计误差系统:
(10)
其中
改写误差系统(10),得到:
(11)
其中
,,。
在给出结论之前,给出以下定义,便于后续分析。
定义1:对于切换信号
和任意的k,
(
)。对开区间
上的不连续点的数量
假设有不等式
(12)
成立,其中的正常数
和
分别表示为平均驻留时间(ADT)和振颤界。
定义2:在
情况下的估计误计误差系统(11)是指数稳定的;如果存在两个常数
和
,使下述不等式成立:
(13)
定义3:对于扰动衰减水平
,在零初始条件下,估计误差
满足
-
性能,如果满足以下条件:
(14)
对于所有非零
和
(定义为
)是向量
的
范数。
本文的目的是针对系统(1)设计一组式(9)结构的降阶估计器,并满足以下要求:
1)
的增广误差系统(11)是指数稳定的。
2) 在零初始条件下,对于给定的扰动衰减水平
和所有非零
,误差系统(11)满足
-
性能。
3. 主要结果
在本节中,将建立一个充分条件,使估计误差系统(11)达到指数稳定性和
-
性能。然后,基于一组线性矩阵不等式的解,得到所需的降阶估计器增益。
定理1:对于给定的估计器增益
和给定的正标量
和
,对于任何切换信号的平均驻留时间
满足
(15)
估计误差(11)是指数稳定的。如果存在正标量
,,以及两个对称正定矩阵序列的
,,使得下列线性矩阵不等式对任何
都是可行的:
(16)
以及
(17)
其中
证明:为了解决系统(11)的稳定性问题,选择以下Lyapunov函数:
(18)
其中
定义
,从(18)可以求出:
(19)
(20)
(21)
因此,结合(19)~(21)可推导出
(22)
其中
考虑Lipschitz条件(2),有以下不等式成立:
(23)
以及
(24)
其中
这意味着
(25)
从定理(1)中
,可以推出
(26)
对于任意切换信号和任意
,令
。那么。对于任意
,由(26)可以证明
(27)
利用(17),很容易得到
(28)
以及
(29)
由此,由(27)-(29)可知
(30)
接下来,定义
和
,由(18)不难推出
(31)
和
(32)
进而,可以得到
(33)
定义
很容易得到
。因此,可以得出
(34)
根据定义2,(11)中的估计误差系统在
时是指数稳定的。证明完成。
定理2:对
-
性能指数
,估计器增益
和给定的正标量
和
。在
下的估计误差(11)是指数稳定的,对于任何切换信号的平均驻留时间
满足如下不等式:
(35)
并且在零初始条件下满足
-
性能约束(3),如果存在正标量
,,以及两个对称正定矩阵序列
,,使得下列线性矩阵不等式对任意
都是可行的:
(36)
(37)
(38)
其中
(39)
证明:定义以下函数:
(40)
进而,可以从式(36)
中推出
(41)
其中
。
因此,不难推出
(42)
进一步有
(43)
结合零初始条件得到
(44)
从而有
(45)
另一方面,由(37)可知
(46)
结合(45)和(46)得到
(47)
然后,调用(35),有
(48)
通过简单的计算,可以得到
(49)
也就意味着
(50)
取
的最大值
,可以得到
(51)
也就是说
(52)
证明完成。
定理3:对
-
性能指数
,估计器增益
和给定的正标量
和
。在
下的估计误差(11)是指数稳定的,对于任何切换信号的平均驻留时间
满足如下不等式:
(53)
并且在零初始条件下满足
-
性能约束(3),如果
存在正标量
,,以及两个对称正定矩阵序列
,,和任意实矩阵
使得下列线性矩阵不等式对任意
都是可行的:
(54)
(55)
(56)
其中
那么,由
给出的期望增益矩阵为
(对
)
证明:通过用
替换
,定理3可以直接由定理2得到。证明完成。
注2:目前已经成功地解决了离散时滞非线性切换复杂网络的
-
降阶状态估计问题。提出了一种新的模型化简方法,通过引入辅助变量,将直接观测状态用测量输出表示,不可测状态通过设计降阶估计器估计。在定理1中,利用ADT方法和Lyapunov稳定性理论证明了得到的估计误差系统的指数稳定性。在定理2中给出了保证估计误差对外生干扰的
-
性能水平的充分条件。最后,在定理3中得到了期望的降阶估计器增益。
注3:在过去的十多年里,时滞切换复杂网络的状态估计问题引起了人们的广泛关注,已有大量的研究成果。与已有文献相比,本文的研究具有以下显著的创新之处:1) 首次尝试解决离散时滞非线性切换复杂网络的
-
降阶状态估计问题;2) 建立了一种新的合理的降阶估计器设计框架,有效地降低了大规模复杂网络带来的计算复杂度;3) 从指数稳定性和
-
性能两个重要性能指标对所解决的降阶状态估计问题进行了综合分析。
4. 仿真实验
本节通过一个仿真实例来验证本文提出的降阶估计器设计方法的有效性和适用性。
考虑一个有3个节点的切换复杂网络,其中每个节点的状态向量是4-D的,系统参数为
对于本例,假设网络拓扑是在两种模式之间切换的。所以,外部耦合矩阵如下
内耦合矩阵取
。时变时滞的边界取
和
。
非线性函数的选择如下
其中
并且
。
接下来,给出了两种降阶估计器的设计方案,即Case 1:三阶估计器和Case2:二阶估计器。
case 1:将输出矩阵设为
然后,在假设1中给出参数
和
。其他参数分别为
,。通过求解定理3中的LMIs (54)~(56),得到一系列可行解为
,,, 以及
case 2:将输出矩阵设为
设假设1中
,,其余参数设
,。通过求解定理3中的LMIs (54)~(56),得到的解为
,,, 以及
,
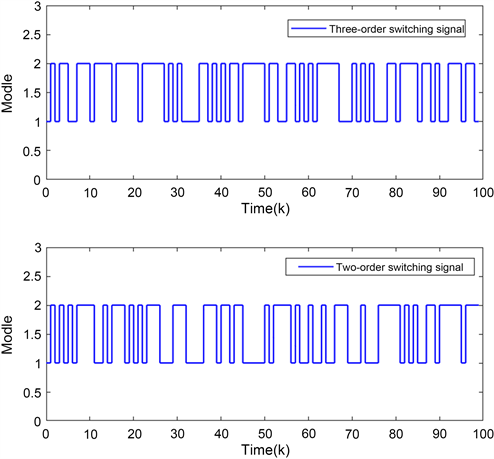
相应的仿真结果如图1~6所示。图1~3给出了不可测部分的真实状态轨迹及其用降阶后的三阶估计器的估计。图4和图5所示为二阶估计器的真实状态及其估计。切换规则如图6所示。仿真结果表明,所估计轨迹能较好地跟踪真实轨迹,验证了所提出的降阶估计器的有效性。
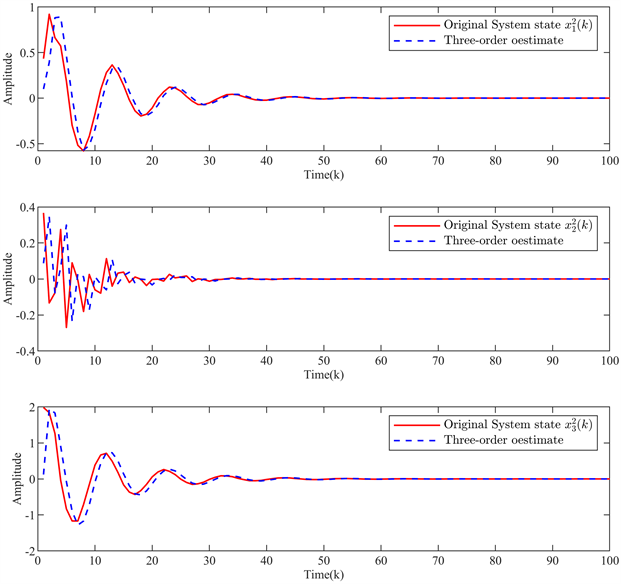
Figure 1. Actual state and its estimate for
图1.
实际输出及其估计值
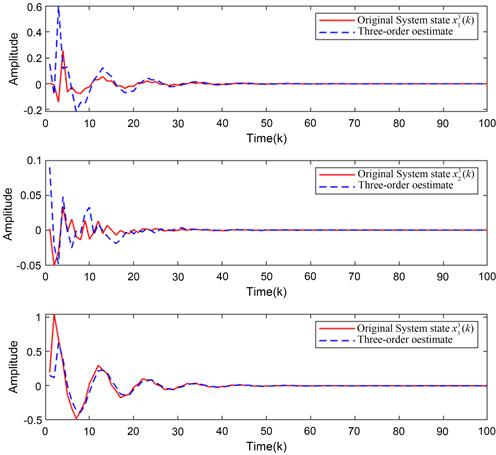
Figure 2. Actual state and its estimate for
in three-order system
图2. 三阶系统中
的实际输出及其估计值
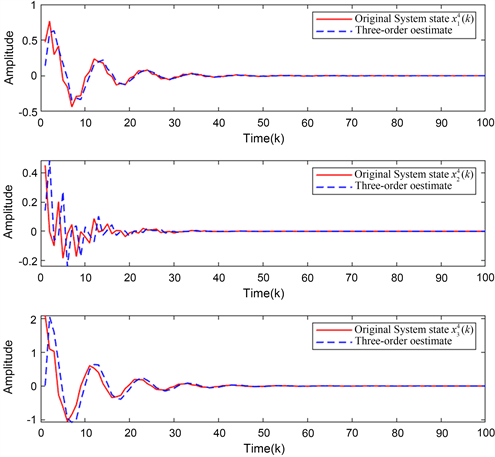
Figure 3. Actual state and its estimate for
in three-order system
图3. 三阶系统中
的实际输出及其估计值
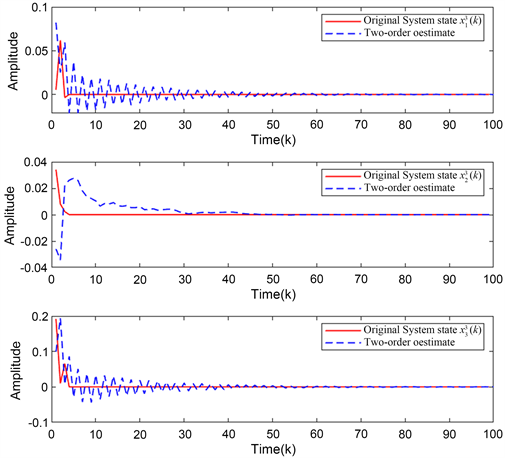
Figure 4. Actual state and its estimate for
in two-order system
图4. 二阶系统中
的实际输出及其估计值

Figure 5. Actual state and its estimate for
in two-order system
图5. 二阶系统中
实际输出及其估计值
图6. 切换信号
5. 总结
本文研究了一类离散时滞非线性切换复杂网络的
-
降阶状态估计问题。通过引入辅助变量,用一种新的方法设计了降阶估计器,将可以直接观测的状态用测量输出表示,针对不可测量的状态通过设计一个降阶估计器来估计。利用ADT及Lyapunov稳定性理论,给出了保证所得到的估计误差系统指数稳定性和
-
性能指标的充分条件。通过求解一组线性矩阵不等式,得到了所需的降阶估计增益。最后,通过数值仿真验证了理论结果的有效性。但本文所考虑的网络是理想状态下的网络,现实中网络所可能发生的故障遭受的网络攻击和信道冗余等问题将是后续需要解决的问题。
文章引用
张亚平,张梦瑶. 基于驻留时间的切换复杂网络的降阶估计
Reduced Order Estimation of Switching Complex Networks Based on Dwell Time[J]. 应用数学进展, 2022, 11(12): 8522-8539. https://doi.org/10.12677/AAM.2022.1112900
参考文献
- 1. Boccaletti, S., Latora, V., Moreno, Y., Chavez, M. and Hwang, D. (2006) Complex Networks: Structure and Dynamics. Physics Reports—Review Section of Physics Litters, 424, 175-308. https://doi.org/10.1016/j.physrep.2005.10.009
- 2. Chen, D., Yang, N., Hu, J. and Du, J. (2019) Resilient Set-Membership State Estimation for Uncertain Complex Networks with Sensor Saturation under Round-Robin Protocol. International Journal of Control Automation and Systems, 17, 3035-3046. https://doi.org/10.1007/s12555-018-0780-8
- 3. Chen, Y., Wang, Z., Wang, L. and Sheng, W. (2020) Mixed/State Estimation for Discrete-Time Switched Complex Networks with Random Coupling Strengths through Redundant Chan-nels. IEEE Transactions on Neural Networks and Learning Systems, 31, 4130-4142. https://doi.org/10.1109/TNNLS.2019.2952249
- 4. Shen, B., Wang, Z., Wang, D. and Li, Q. (2020) State-Saturated Recursive Filter Design for Stochastic Time-Varying Nonlinear Complex Networks Under-Deception Attacks. IEEE Transactions on Neural Networks and Learning Systems, 31, 3788-3800. https://doi.org/10.1109/TNNLS.2019.2946290
- 5. Peng, S. (1999) Robust Kalman Filtering for Continuous-Time Systems with Discrete-Time Measurements. IMA Journal of Mathematical Control and Information, 16, 221-232. https://doi.org/10.1093/imamci/16.3.221
- 6. Geromel, J. and Oliveira, M. (2001) H2 and H∞ Robust Filtering for Convex Bounded Uncertain Systems. IEEE Transactions on Automatic Control, 46, 100-107. https://doi.org/10.1109/9.898699
- 7. Liu, Y., Shen, B. and Shu, H. (2020) Finite-Time Resilient State Estimation for Discrete-Time Delayed Neural Networks under Dynamic Event-Triggered Mechanism. IEEE Transactions on Neural Networks, 121, 356-365.
https://doi.org/10.1016/j.neunet.2019.09.006
- 8. Yang, F., Han, Q. and Liu, Y. (2019) Distributed State Estima-tion over a Filtering Network with Time-Varying and Switching Topology and Partial Information Exchange. IEEE Transactions on Systems Man Cybernetics-Systems, 49, 870-882. https://doi.org/10.1109/TCYB.2017.2789212
- 9. He, S. and Liu, F. (2010) Robust Peak-to-Peak Filtering for Markov Jump Systems. Signal Processing, 90, 513-522.
https://doi.org/10.1016/j.sigpro.2009.07.018
- 10. 乔伟豪, 朱凤增, 彭力. 基于自适应事件触发的时滞系统分布式——滤波[J]. 控制与决策, 2022, 37(4): 1074- 1080.
- 11. Li, Z., Chang, X., Mathiyalagan, K. and Xiong, J. (2017) Robust Energy-to-Peak Filtering for Discrete-Time Nonlinear Systems with Measurement Quantization. Signal Processing, 13, 102-109. https://doi.org/10.1016/j.sigpro.2017.03.029
- 12. Zhu, F., Liu, X., Wen, J., Xie, L., and Peng, L. (2020) Distributed Robust Filtering for Wireless Sensor Networks with Markov Switching Topologies and De-ception Attacks. Sensors, 20, 1984. https://doi.org/10.3390/s20071948
- 13. Boutayeb, M. and Darouach, M. (2000) A Reduced-Order Observer for Non-Linear Discrete-Time Systems. Systems & Control Letters, 39, 141-151. https://doi.org/10.1016/S0167-6911(99)00102-4
- 14. Su, X., Wen, Y., Shi, P. and Lam, H.K. (2019) Event-Triggered Fuzzy Filtering for Nonlinear Dynamic Systems via Reduced-Order Approach. IEEE Transactions on Fuzzy Systems, 27, 1215-1225.
https://doi.org/10.1109/TFUZZ.2018.2874015
- 15. Liu, Y. and Arumugam, A. (2020) Event-Triggered Non-Fragile Finite-Time Guar-Anteed Cost Control for Uncertain Switched Nonlinear Networked Systems. Nonlinear Analysis: Hybrid Systems, 36, Article ID: 100884.
https://doi.org/10.1016/j.nahs.2020.100884
- 16. Zhang, D., Yu, L., Song, H. and Wang, Q. (2013) Distributed Filtering for Sensor Networks with Switching Topology. International Journal of Systems Science, 44, 2104-2118. https://doi.org/10.1080/00207721.2012.684903
- 17. Wang, L. and Wang, Q. (2011) Synchronization in Complex Networks with Switching Topology. Physics Letters A, 375, 3070-3074. https://doi.org/10.1016/j.physleta.2011.06.054
- 18. Chi, Z. (2011) Design of Dimension Reduction Observer for Nonlinear Systems. Harbin Normal University, Harbin.