Advances in Applied Mathematics
Vol.04 No.02(2015), Article ID:15349,11
pages
10.12677/AAM.2015.42025
The Non-Smooth Analysis of Filippov Rub-Impact Rotor System
Jieqiong Xu
College of Mathematics and Information Science, Guangxi University, Nanning Guangxi
Email: clh4@163.com
Received: May 7th, 2015; accepted: May 22nd, 2015; published: May 29th, 2015
Copyright © 2015 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
A three-degree-of-freedom lateral-torsional coupled Filippov differential system for a Jeffcott rotor supported rigidly is established. Comparing the lateral-torsional coupled rub-impact rotor and the lateral rub-impact rotor through bifurcation diagrams of amplitude and the phase difference, time trajectories, phase portraits, Poincaré maps, time-history diagram, the phase characteristic and the non-smooth dynamic behavior of the Filippov rub-impact system are analyzed numerically. It is shown that the rub-impact response has the definite phase characteristic; the two models have a similar bifurcation process in their bifurcation figures; the torsional vibration is obvious, and the stick-slip phenomena will happen in this system in a certain parameter.
Keywords:Rub-Impact Rotor, Filippov System, Phase Difference, Non-Smooth Analysis, Stick-Slip Phenomenon
一类Filippov碰摩转子系统的非光滑分析
徐洁琼
广西大学数学与信息科学学院,广西 南宁
Email: clh4@163.com
收稿日期:2015年5月7日;录用日期:2015年5月22日;发布日期:2015年5月29日

摘 要
针对两端刚性支撑的Jeffcott转子,建立了一个三自由度、弯扭耦合的Filippov碰摩转子系统。通过对比有无考虑扭振的碰摩转子的振幅和激励及响应相位差随转动角速度变化的分岔图及转子的时间历程图、相图、Poincaré截面图,数值分析了弯扭耦合的Filippov碰摩转子系统的碰摩响应相位特征和非光滑动力学行为。分析表明:对于弯扭耦合的Filippov碰摩转子系统,振动响应具有确定的相位特征;两类方程分叉图的变化过程基本相同;扭转现象明显;在一定参数下,系统会出现stick-slip现象。
关键词 :碰摩转子,Filippov系统,相位差,非光滑分析,Stick-Slip现象

1. 引言
转子碰摩是旋转机械的重要故障之一,对机械系统会造成严重的损害[1] ,而且系统的这种行为具有很强的非线性特性。由于碰摩现象的这种特征,人们对这一现象进行了大量的研究[2] -[5] ,得到了许多有用的结果,并且主要以弯曲振动的研究为主。实际上,弯扭振动之间是相互耦合的,它们都与系统的参数和状态有关,如果进行碰摩分析时,仅考虑到弯曲振动而忽略扭转振动影响,多少会与实际系统产生一定的偏差。因此一些学者对碰摩转子的弯扭耦合振动特性进行了研究。Edwards [6] 研究了扭转振动对碰摩转子动力学行为的影响。何成兵[7] 研究了单盘转子弯扭耦合振动的动力学特性。张跟胜[8] 对单跨双盘转、静子轴向碰摩的弯扭耦合振动进行了分析。Patel [9] 研究了裂纹及碰摩转子的弯扭耦合振动特性。文献[6] -[9] 中,对碰摩转子摩擦力采取的处理办法是对其进行光滑化,即,当转子与静子的切向相对速度为零时,近似认为摩擦力为零。本文详细分析了摩擦力矩对转子扭转振动的影响,考虑摩擦力的非光滑性,得到一个三自由度、弯扭耦合的Filippov碰摩转子系统。此系统具有第二类和第三类非光滑性。文献[10] [11] 研究了仅考虑弯曲振动的碰摩转子振动响应的相位特征。在此基础上,本文对建立的三自由度、弯扭耦合的 Filippov碰摩转子系统的相位特征和非光滑动力学行为进行了研究。
2. 物理模型及运动方程
本文以两端刚性支承的Jeffcott转子为研究对象,如图1所示。假设转子简化为质量为 的单圆盘与弯扭柔性的无质量轴固联,轴是个向同性,为刚性支承。碰摩发生时,单圆盘坐标和碰摩力如图2所示。图中,
的单圆盘与弯扭柔性的无质量轴固联,轴是个向同性,为刚性支承。碰摩发生时,单圆盘坐标和碰摩力如图2所示。图中, 为坐标原点,是单圆盘形心静平衡位置。
为坐标原点,是单圆盘形心静平衡位置。 为圆盘形心位置,坐标为
为圆盘形心位置,坐标为 和
和 。
。 为偏心距。
为偏心距。 为定子中心的位置,定子被看作是刚性支撑的径向环形弹簧。
为定子中心的位置,定子被看作是刚性支撑的径向环形弹簧。 为转定子间隙圆半径。当
为转定子间隙圆半径。当 ,转子与定子接触。转子与定子的接触点为
,转子与定子接触。转子与定子的接触点为 。
。 和
和 分别是定子作用在转子上的法向力和摩擦力。摩擦力对转子中心产生摩擦力矩
分别是定子作用在转子上的法向力和摩擦力。摩擦力对转子中心产生摩擦力矩 。
。 为转子半径。本文考虑由摩擦力引起的转子扭转。用
为转子半径。本文考虑由摩擦力引起的转子扭转。用 表示扭转角。
表示扭转角。 为转轴角速度,是常量。接触点
为转轴角速度,是常量。接触点 的切向速度为
的切向速度为 ,切向相对加速度为
,切向相对加速度为 。其中
。其中 表示对
表示对 求导。下面给出系统的运动方程:
求导。下面给出系统的运动方程:
当 ,
,
 (1)
(1)

Figure 1. Schematic diagram of the rub-impact rotor
图1. 碰摩转子模型
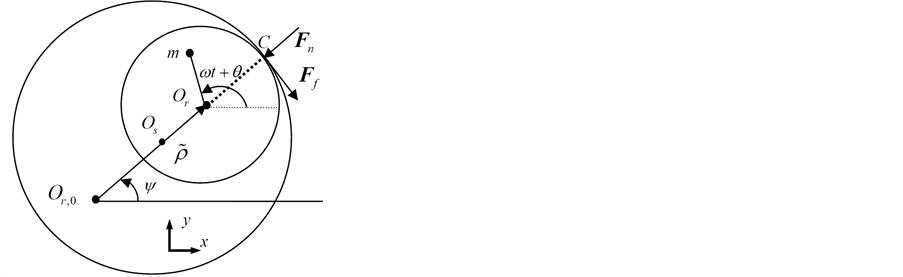
Figure 2. Schematic diagram of the rub and impacts force
图2. 碰摩力示意图
当 ,
,
 (2)
(2)
其中 为转子过质心的转动惯量,
为转子过质心的转动惯量, 为弯曲刚度,
为弯曲刚度, 为弯振阻尼,
为弯振阻尼, 为扭转刚度,
为扭转刚度, 为扭振阻尼,
为扭振阻尼, 为定子刚度,
为定子刚度, 分别是定子作用在转子上的法向力和摩擦力,表达式如下:
分别是定子作用在转子上的法向力和摩擦力,表达式如下:
当相对切向加速度为零时,摩擦力的大小用 表示。
表示。 为动摩擦系数,
为动摩擦系数, 为静摩擦系数。
为静摩擦系数。
对方程(1),(2)无量纲化,得:
当 ,
,
 (3)
(3)
当 ,
,
 (4)
(4)
其中 表示对
表示对 求导,
求导,



无量纲量为:
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,  ,
,
 ,
,  ,
, .
.
3. 数值仿真与分析
下面分析,弯扭耦合的Filippov碰摩转子系统的碰摩响应相位特征及非光滑动力学行为。为了分析扭振对系统动力学行为的影响,与不考虑扭振的碰摩转子系统进行比较,系统方程参照文[12] 。在下面的数值仿真中,无扭振系统的动力学响应曲线用“·”表示,弯扭耦合系统的动力学响应曲线用“×”表示。
3.1. Filippov碰摩转子系统的碰摩响应相位特征
取参数 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, ,
, 从0.5变化到2.8作为分岔参数。先分析方程(3)和(4)的弯振情况。根据上述参数得到关于
从0.5变化到2.8作为分岔参数。先分析方程(3)和(4)的弯振情况。根据上述参数得到关于 和激励与响应相位差
和激励与响应相位差 的分岔图,如图3和图4所示。从图3和图4可以看出,无扭振系统的动力学响应与弯扭耦合系统的动力学响应基本一致。随着转速的增大,在
的分岔图,如图3和图4所示。从图3和图4可以看出,无扭振系统的动力学响应与弯扭耦合系统的动力学响应基本一致。随着转速的增大,在 时,转子与定子接触,在
时,转子与定子接触,在 时,振幅和相位差同时跳跃,运动从全局碰摩变成非碰摩运动。转子发生全局碰摩时,相位差小于
时,振幅和相位差同时跳跃,运动从全局碰摩变成非碰摩运动。转子发生全局碰摩时,相位差小于 ,但当相位差大于
,但当相位差大于 时,振幅达到最大值但不会马上从全局碰摩跳跃到非碰摩运动,而会维持一段很小的转速范围。这和无扭振系统的结论完全一样,即,当系统发生稳态全局碰摩时,系统具有确定的相位特征:偏心激励与转子响应的相位差随着转速的增加逐渐接近
时,振幅达到最大值但不会马上从全局碰摩跳跃到非碰摩运动,而会维持一段很小的转速范围。这和无扭振系统的结论完全一样,即,当系统发生稳态全局碰摩时,系统具有确定的相位特征:偏心激励与转子响应的相位差随着转速的增加逐渐接近 ;当激励与响应的相位差略微大于
;当激励与响应的相位差略微大于 后,相位突然转迁到接近
后,相位突然转迁到接近 。此时,全局碰摩结束,振幅跳跃到非碰摩运动状态。
。此时,全局碰摩结束,振幅跳跃到非碰摩运动状态。
再分析方程(3)和(4)扭振情况。扭转角 与扭转角速度
与扭转角速度 随转速从0.5变化到2.8的分岔图,如图5和图6所示。从图可以看出,当转子弯曲振动为稳态全局碰摩时,扭振为周期运动;随着转速的增加,扭转的角度越来越明显。转子脱离外环后,扭振渐近稳定到零。
随转速从0.5变化到2.8的分岔图,如图5和图6所示。从图可以看出,当转子弯曲振动为稳态全局碰摩时,扭振为周期运动;随着转速的增加,扭转的角度越来越明显。转子脱离外环后,扭振渐近稳定到零。
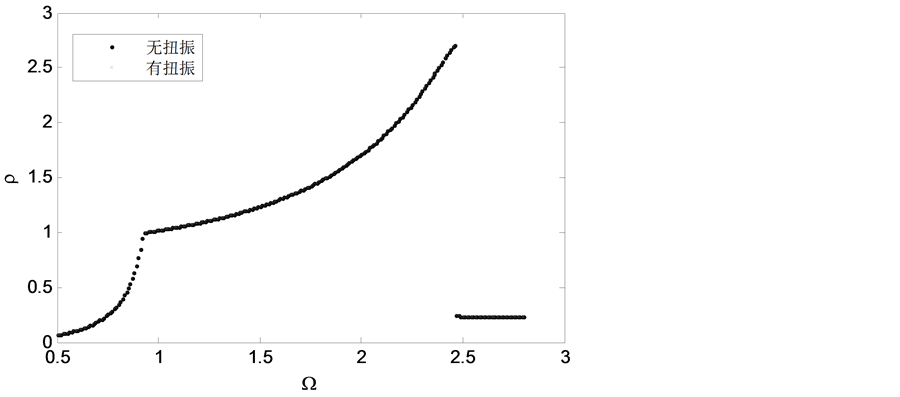
Figure 3. The bifurcation diagram of amplitude
图3. 振幅分岔图

Figure 4. The bifurcation diagram of the phase difference
图4. 相位差分岔图
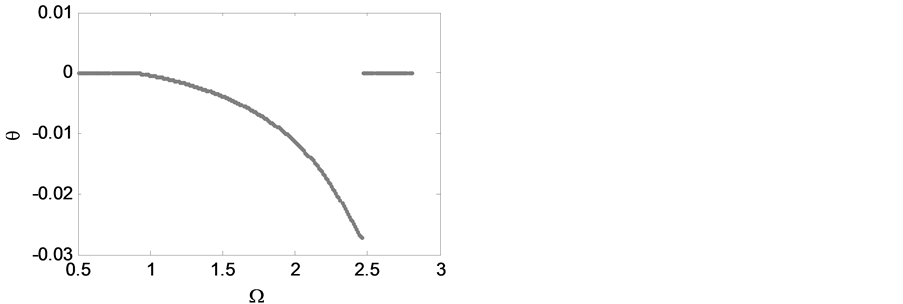
Figure 5. The bifurcation diagram of torsion angle
图5. 扭转角分岔图
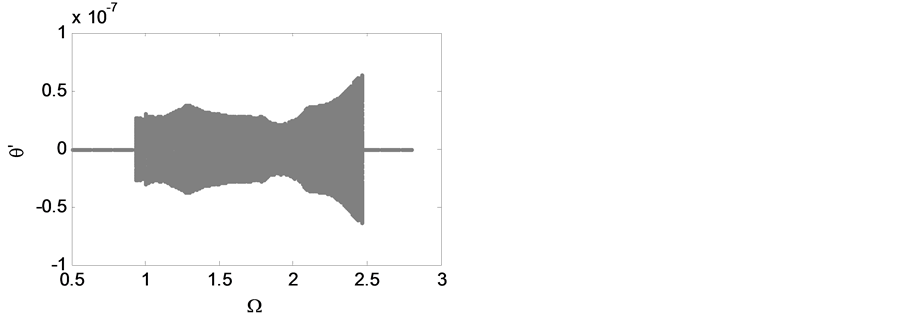
Figure 6. The bifurcation diagram of torsion velocity
图6. 扭转角速度分岔图
3.2. 摩擦系数对Filippov碰摩转子系统动力学响应的影响
随着摩擦系数的增大,全局碰摩运动将失稳。下面分析全局碰摩解的稳定性。令
 ,则,方程(4)可以表示为:
,则,方程(4)可以表示为:


 (5)
(5)
全局碰摩解的稳定性由方程(5)在全局碰摩解 处的雅克比矩阵
处的雅克比矩阵 决定。其中
决定。其中 可以由(5)式得到,由系统的参数决定。且由上节的分析可知,当系统为全局碰摩运动时,
可以由(5)式得到,由系统的参数决定。且由上节的分析可知,当系统为全局碰摩运动时, 为常值,所以
为常值,所以 是一个与时间无关的常矩阵。矩阵
是一个与时间无关的常矩阵。矩阵 的特征值由下列方程确定
的特征值由下列方程确定
 (6)
(6)
其中 由
由 决定,由于表达式复杂,这里省略。
决定,由于表达式复杂,这里省略。 为单位矩阵。根据Hopf分叉条件,可以得到该系统全局碰摩解发生Hopf分叉的参数关系为:
为单位矩阵。根据Hopf分叉条件,可以得到该系统全局碰摩解发生Hopf分叉的参数关系为:
 (7)
(7)
在给定的参数下,根据(7)式可得到:当全局碰摩解发生Hopf分岔时,转动速度 与摩擦系数
与摩擦系数 的参数关系,如图7所示。图中由星号构成的曲线代表弯扭耦合系统转动速度
的参数关系,如图7所示。图中由星号构成的曲线代表弯扭耦合系统转动速度 与摩擦系数
与摩擦系数 的参数关系,
的参数关系,
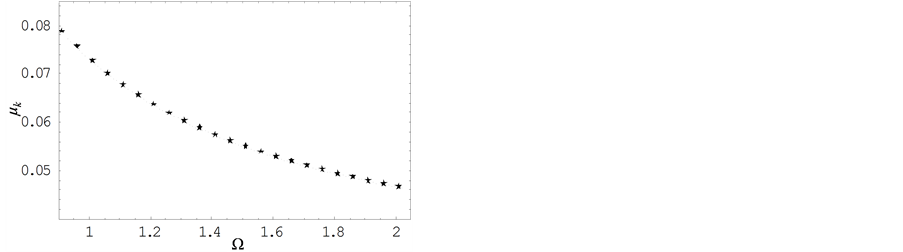
Figure 7. The parameter plane of the rotor speed and friction coefficient of Hopf bifurcation
图7. Hopf分岔转速与摩擦系数的参数关系
原点构成的曲线代表不考虑扭转的系统转动速度 与摩擦系数
与摩擦系数 的参数关系。可以看出,两曲线基本重合。这说明两系统发生Hopf分叉的值基本一致。当摩擦系数
的参数关系。可以看出,两曲线基本重合。这说明两系统发生Hopf分叉的值基本一致。当摩擦系数 时,系统不发生Hopf分叉。随着摩擦系数的增大,发生Hopf分叉时的转动速度越来越小。
时,系统不发生Hopf分叉。随着摩擦系数的增大,发生Hopf分叉时的转动速度越来越小。
取 ,其它系统参数不变。分析方程(3)和(4)的弯振情况。根据上述参数得到关于
,其它系统参数不变。分析方程(3)和(4)的弯振情况。根据上述参数得到关于 和激励与响应相位差
和激励与响应相位差 的分岔图,如图8和图9所示。从图8和图9可以看出,俩曲线总体趋势基本一致。随着转速的增大,当
的分岔图,如图8和图9所示。从图8和图9可以看出,俩曲线总体趋势基本一致。随着转速的增大,当 时,转子与外环接触,转子作全局碰摩运动。当
时,转子与外环接触,转子作全局碰摩运动。当 时,全局碰摩运动发生Hopf失稳,转子开始作局部碰摩运动,这与上面的分析结果一致。转子作局部碰摩运动时,响应相位差
时,全局碰摩运动发生Hopf失稳,转子开始作局部碰摩运动,这与上面的分析结果一致。转子作局部碰摩运动时,响应相位差 的平均值小于
的平均值小于 。当
。当 时,相位差
时,相位差 开始在
开始在 内变化,这说明转子开始作反向局部碰摩运动。当
内变化,这说明转子开始作反向局部碰摩运动。当 时,转子振幅突然跳跃到很大值,相位差
时,转子振幅突然跳跃到很大值,相位差 仍然在
仍然在 内变化,转子发生反向涡动失稳。
内变化,转子发生反向涡动失稳。
3.3. 扭振特性与弯振特性的比较
3.3.1. 摩擦系数较小的情况
当摩擦系数 时,从图4、图5可以看出,当转子弯振为稳定周期运动时,转子的扭振也为稳定的周期运动。
时,从图4、图5可以看出,当转子弯振为稳定周期运动时,转子的扭振也为稳定的周期运动。
3.3.2. 摩擦系数较大的情况
当摩擦系数 时,扭转角
时,扭转角 与扭转角速度
与扭转角速度 随转速从0.5变化到2.8的分岔图,如图10和图11所示。从图可以看出,随着转速的增加,扭转角度越来越明显。当转子弯曲振动为稳态全局碰摩时,扭振为周期运动;当弯振为局部碰摩运动和反向涡动失稳时,扭转为非周期运动。下面分别取
随转速从0.5变化到2.8的分岔图,如图10和图11所示。从图可以看出,随着转速的增加,扭转角度越来越明显。当转子弯曲振动为稳态全局碰摩时,扭振为周期运动;当弯振为局部碰摩运动和反向涡动失稳时,扭转为非周期运动。下面分别取 ,
, ,
, 对弯扭耦合碰摩转子弯振特性和扭振特性进行分析。
对弯扭耦合碰摩转子弯振特性和扭振特性进行分析。
1) 当 时,根据系统(3)和(4)作转子弯振的轨迹图、转子扭振的相图、转子扭振的Poincaré截面图,如图12~14所示。从图12可以看出,在
时,根据系统(3)和(4)作转子弯振的轨迹图、转子扭振的相图、转子扭振的Poincaré截面图,如图12~14所示。从图12可以看出,在 时,转子的弯振为准周期运动。而转子的扭振为混沌运动,如图13和图14所示,Poincaré图14表现为无序点集。
时,转子的弯振为准周期运动。而转子的扭振为混沌运动,如图13和图14所示,Poincaré图14表现为无序点集。
2) 当 时,根据系统(3)和(4)作转子弯振的轨迹图、弯振的Poincaré截面图、转子扭振的相图,如图15~18所示。转子的弯振和扭振都为混沌运动,图16和图18都为无序点集。
时,根据系统(3)和(4)作转子弯振的轨迹图、弯振的Poincaré截面图、转子扭振的相图,如图15~18所示。转子的弯振和扭振都为混沌运动,图16和图18都为无序点集。
3) 当 时,根据系统(3)和(4)作转子弯振的轨迹图、转子扭振的相图、转子扭振的Poincaré截面图以及接触点的相对速度时间历程图,如图19、图20所示。从图19可以看出系统运动为反向涡动失稳,振幅很大。转子的扭振仍然为混沌运动,扭转角比较大,如图20所示。在
时,根据系统(3)和(4)作转子弯振的轨迹图、转子扭振的相图、转子扭振的Poincaré截面图以及接触点的相对速度时间历程图,如图19、图20所示。从图19可以看出系统运动为反向涡动失稳,振幅很大。转子的扭振仍然为混沌运动,扭转角比较大,如图20所示。在 时,系统出现stick-slip现象,如图21所示。
时,系统出现stick-slip现象,如图21所示。
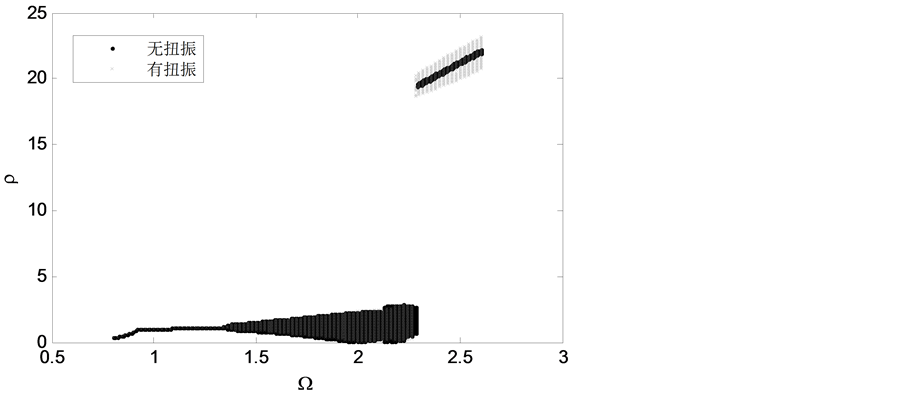
Figure 8. The bifurcation diagram of amplitude
图8. 振幅分岔图
Figure 9. The bifurcation diagram of the phase difference
图9. 相位差分岔图
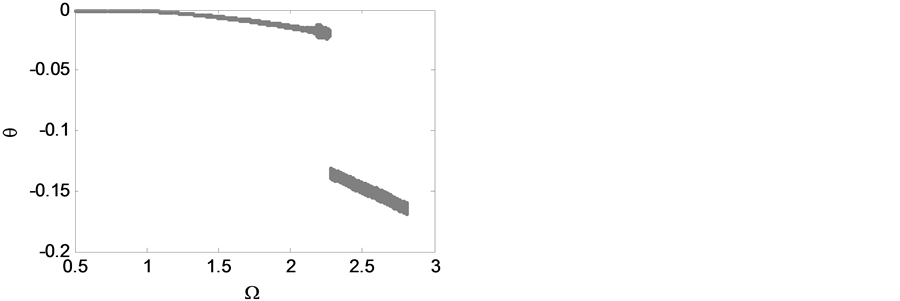
Figure 10. The bifurcation diagram of torsion angle
图10. 扭转角分岔图

Figure 11. The bifurcation diagram of torsion velocity
图11. 扭转角速度分岔图
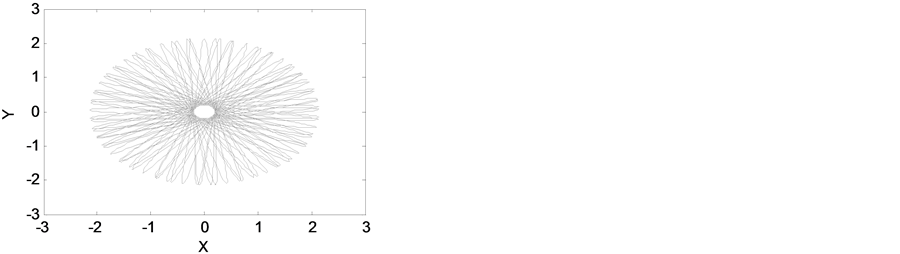
Figure 12. The trajectories of lateral vibration
图12. 转子弯振轨迹
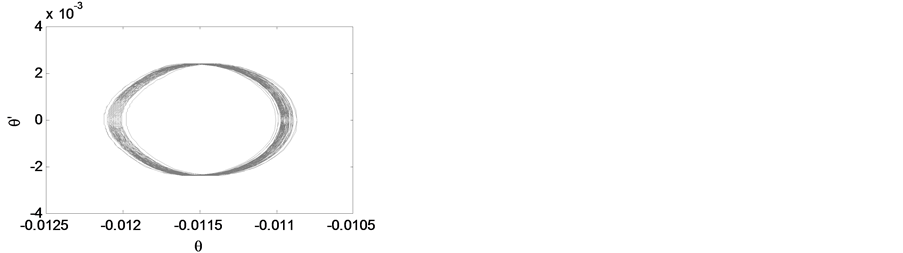
Figure 13. The phase portraits of torsional vibration
图13. 扭振相图
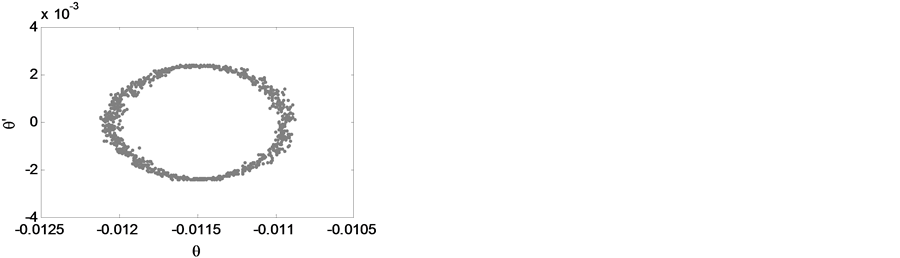
Figure 14. The Poincaré-map of torsional vibration
图14. 扭振Poincaré截面图

Figure 15. The trajectories of lateral vibration
图15. 转子弯振轨迹

Figure 16. The Poincaré-map of lateral vibration
图16. 弯振Poincaré截面图
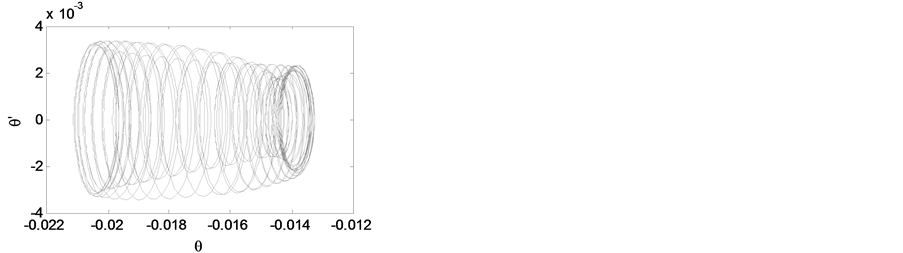
Figure 17. The phase portraits of torsional vibration
图17. 扭振相图
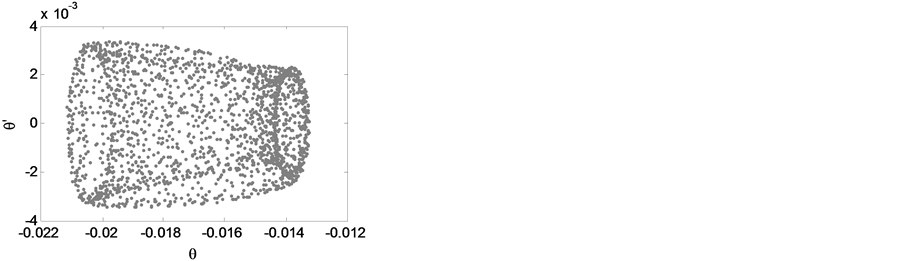
Figure 18. The Poincaré-map of torsional vibration
图18. 扭振Poincaré截面图
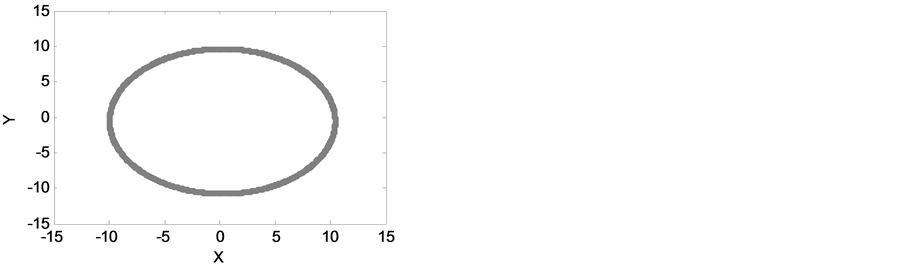
Figure 19. The trajectories of lateral vibration
图19. 转子弯振轨迹
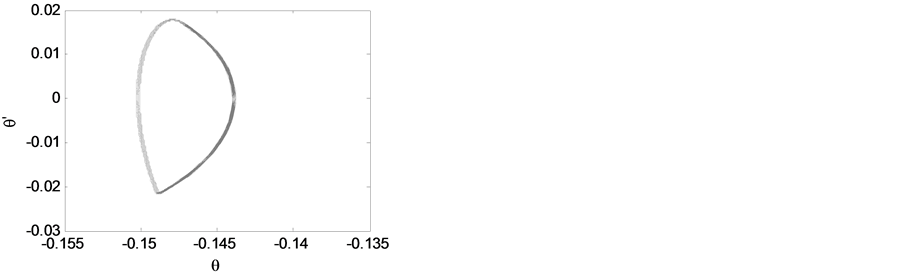
Figure 20. The phase portraits of torsional vibration
图20. 扭振相图
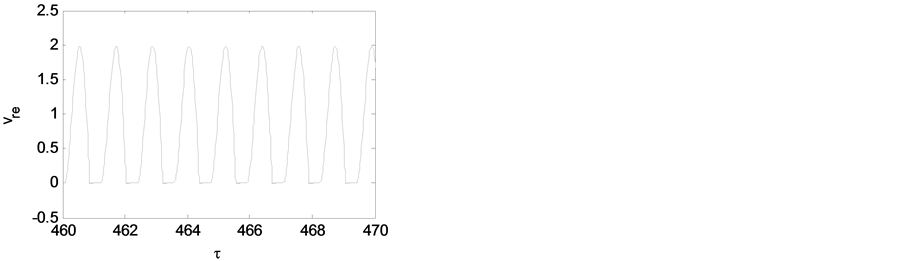
Figure 21. Time-history diagram of relative velocity
图21. 相对速度的时间历程图
4. 结论
本文分析了摩擦力矩对转子扭转振动的影响,并考虑了摩擦力的非光滑性,得到一个Fillippov碰摩转子系统。对此系统的碰摩响应相位特征及非光滑动力学行为进行了分析。主要分三种情况进行了讨论。首先,把此系统与不考虑扭转的碰摩转子系统进行对比,分析表明:两系统的碰摩响应具有相同的相位特征;对于碰摩转子具体的振动状态,系统具有确定的相位特征。这说明相位特征是分析系统振动状态的重要特征,相位是描述系统振动的重要状态变量。然后,分析摩擦系数对碰摩转子系统动力学行为的影响。对比弯扭耦合的Filippov系统与不考虑扭转的碰摩转子系统,两系统弯振响应的变化趋势基本相同,都是从非碰摩周期运动®全局碰摩周期运动®正向局部碰摩运动®反向局部碰摩运动®反向涡动失稳。最后,对Filippov碰摩转子系统的扭振特性和弯振特性进行了对比。此系统的扭振现象明显,在不同的参数下,扭振可以为周期运动也可以为混沌运动,且扭振对弯振有一定影响。在一定参数下,系统会出现stick-slip现象。综上所述,综合考虑碰摩转子系统的弯振和扭振是很有必要的,它可以为该类故障诊断提供更丰富完备的信息,提高诊断的准确率。
基金项目
广西自然科学基金(No. 2014GXNSFBA118024)资助。
文章引用
徐洁琼, (2015) 一类Filippov碰摩转子系统的非光滑分析
The Non-Smooth Analysis of Filippov Rub-Impact Rotor System. 应用数学进展,02,197-208. doi: 10.12677/AAM.2015.42025
参考文献 (References)
- 1. Yu, J.J., Goldman, D.E., Bently, D.E. and Muzynska, A. (2002) Rotor/seal experimental and analytical study on full annular. Journal of Engineering for Gas Turbines and Power, 124, 340-350.
- 2. Chu, F. and Zhang, Z. (1998) Bifur-cation and chaos in a rub-impact Jeffcott rotor system. Journal of Sound and Vibration, 210, 1-18.
- 3. Jiang, J. and Ulbrich, H. (2005) Stability analysis of sliding whirl in a nonlinear Jeffcott rotor with cross-coupling stiffness coeffi-cients. Nonlinear Dynamics, 127, 163-178.
- 4. Zhang, W.M. and Meng, G. (2006) Stability, bifurcation and chaos of a high-speed rub-impact rotor system in MEMS. Sensors and Actuators A, 127, 163-178.
- 5. Karpenkoa, E.V., Wiercigroch, M., Pavlovskaia, E.E. and Neilsona, R.D. (2006) Experimental verification of Jeffcott rotor model with preloaded snubber ring. Journal of Sound and Vibration, 298, 907-917.
- 6. Edwards, S., Lees, A.W. and Friswell, M.I. (1999) The influence of torsion on rotor/stator contact in rotating machinery. Journal of Sound and Vibration, 225, 767-778.
- 7. 何成兵, 顾煜炯, 李猛 (2006) Jeffcott转子碰摩的弯扭耦合振动特性分析. 振动与冲击, 2, 59-63.
- 8. 张跟胜, 丁千, 陈予恕 (2009) 轴向摩擦双盘转子的振动分析. 机械强度, 5, 712-718.
- 9. Patel, T.H. and Darpe, A.K. (2009) Coupled beading-torsional vibration analysis of rotor with rub and crack. Journal of Sound and Vibration, 326, 740-752.
- 10. Wang, S.M., Lu, Q.S., Wang, Q. and Xu, P. (2006) Reducing the amplitude of vibration at resonances by phase modulation. Journal of Sound and Vibration, 290, 410-424.
- 11. Wang, S.M., Xu, J.Q. and Wang, Q. (2010) The mechanism of stiffness increase phenomenon of a rubbing disk. Journal of Acta Mechanica Sinica, 26, 441-448.
- 12. 徐洁琼, 王士敏, 王琪 (2010) 碰摩转子刚度增加现象的相位特征. 振动与冲击, 6, 114-148.