Transmission and Distribution Engineering and Technology
Vol.07 No.01(2018), Article ID:24299,14
pages
10.12677/TDET.2018.71002
A Decentralized Control in Microgrid: An Autonomous Control Strategy Derived from CSMA/CD Mechanism
Yongjin Yang
Nanjing Guotie Electric Co, Ltd, Nanjing Jiangsu

Received: Mar. 12th, 2018; accepted: Mar. 21st, 2018; published: Mar. 30th, 2018

ABSTRACT
In this paper, aiming at solving multi-source coordination control problem in micro-grid, an autonomous control strategy which is not based on central controller (MGCC) and on communication has been proposed. This strategy mainly consists two sub-strategies: A micro-grid autonomous control strategy (ACS) base on state classification and a micro-source control strategy based on Carrier Sense Multiple Access with Collision Detection (CSMA/CD) mechanism. At different state levels, state classification control strategy adopts different control strategies for micro-sources by establishing system state classification model and evaluating system operation state. Thus, the operation state of each unit can be optimized from the system level; time-sharing control strategy which is based on CSMA/CD mechanism, quantifies the priority of participating level for each Controllable Micro-Generator (CMG). Thus, system can guarantee the control order for micro-sources and the uniqueness of main source. Hence, with the proposed ACS, one master distributed generator (MDG) can be decided when facing the state change of micro-grid. Then, some negative effects including current circulation caused by multi distributed generators (DGs) and distributed sources (DSs) adopting VF or droop control can be solved. So the stability of system can be improved. Simulation results based on PSCAD/EMTDC platform are presented to show the validity of the proposed ACS.
Keywords:Micro-Grid, System Health Status, CSMA/CD, Dynamic Adjustment
基于系统状态分级与CSMA/CD机制的 微电网自治控制策略研究
杨永进
南京国铁电气有限责任公司,江苏 南京
收稿日期:2018年3月12日;录用日期:2018年3月21日;发布日期:2018年3月30日

摘 要
针对微电网中多源协调控制问题,提出了一种不基于中心控制器(MGCC)和通信的多源自治控制策略,该策略主要包含基于系统状态分级的微电网自治策略和基于CSMA/CD机制的微源调节策略两套子策略。分级调节策略建立了系统状态分级模型评估系统运行状态,不同状态级别下微源的控制策略不同,从系统层面上优化了各单元运行状态;分时调节策略以CSMA/CD竞争机制为核心,量化了各CMG参与系统调节优先级高低,使微源调节变得有序,保证主电源的唯一性。应对微网状态变化时,该自治控制策略可以从分布式电源中选取一个最优调节电源(MDG),从而有效的解决了多源并联运行采用VF或下垂控制时的系统环流问题,提高了系统稳定性。利用PSCAD/EMTDC软件建立了仿真系统,验证了所提控制策略的有效性。
关键词 :微电网,系统健康状态,CSMA/CD,动态调节

Copyright © 2018 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
微电网是融合分布式发电、分布式储能、负荷以及控制装置、保护装置为一体的新型电网,它可以与大电网连接并网运行,也可以脱网自治运行 [1] [2] ,可以最大化实现新能源发电的经济效益、环境效益 [3] 。由于微电网中存在光伏、风电等间歇、波动、随机性分布式电源,会对系统运行与控制带来不利的影响,实现微电网自治、稳定、灵活可靠运行是微电网技术的客观要求,也是微电网运行控制技术研究的重点。
目前,微电网的运行控制基本方案包括两种:主从控制和分散控制 [4] 。主从控制原理简单易于实现,但是要求MGCC(微电网中心控制器)知道各单元的信息,并且能够根据信息处理结果给出各单元控制指令,这种控制方案依赖通信技术来实现,如果发生通信故障,将严重影响系统的安全稳定运行,降低系统的可靠性。分散控制(即对等控制)中分布式电源利用本地信息决定自身出力,不依赖MGCC下发指令,对通信的要求较低,而且某一单元发生故障不会影响系统正常运行,有利于提高系统运行的可靠性和实现单元即插即用 [5] [6] [7] ,在微电网通信出现故障的情况下,可以实现系统自治运行。考虑到分布式电源、微电网自身所具有的分散、即插即用等特点,对等控制是比较符合这些特性的控制方式,但需要解决多个电源的协调控制问题。
本文重点研究对等控制下的微电网各单元运行控制方法。一般来说,在对等控制中,储能、微型燃气轮机等可调微电源(Controllable Micro-Generator, CMG)均采用下垂控制策略,可以等效为多个并联运行的电压源。但在低压微电网中,主要会存在两方面的问题:1) 由于线路特性、负荷分布等因素影响,并联电压源的瞬时输出电压幅值、频率可能会不同,这将导致系统功率环流、稳定性差等问题,虽然文献 [7] - [16] 提出了“虚拟阻抗”、“虚拟功率”、改进下垂曲线等方法,但是“虚拟阻抗”等需要事先整定,灵活性较差,同时降低了逆变器效率;2) 微电网结构复杂多变,而传统对等控制中微电源一般按照预先设定的功率调节方案、电源工作方式运行,不能根据电网和自身情况动态调整,自适应性较差 [17] [18] [19] 。总体上,目前的研究成果并没有从根本上解决多个电压源协调稳定控制问题。
针对上述问题,本文提出了基于系统状态分级和CSMA/CD (Carrier Sense Multiple Access with Collision Detection)机制模型的微电网自治控制策略。该策略可以保证微电网运行时有唯一的CMG作为主电压源维持系统的电压、频率稳定,其他CMG作为从电流源根据系统运行状况自主调整输出功率。控制策略主要包含一个主电源控制原则和两个子策略:
1) 主电源控制原则为主电源采用下垂控制策略维持系统电压和频率,从电流源同时集成倒下垂控制策略和恒功率控制策略,这样可以避免多个电压源并联运行时产生系统环流。
2) 两个子策略为分别针对系统控制层面所提的基于系统状态分级的微电网自治运行策略(分级调节策略)和针对微源控制层面所提的基于CSMA/CD机制的微源分时调节策略(分时调节策略),根据评估结果来改变控制策略,以改善微电网所处的状态级别,同时保证了各CMG有序、协调运行。
2. 基于系统状态分级的微电网自治策略
分级调节策略的主要功能是实现各单元的协调有序运行,通过相关判断改变CMG控制策略,主要包含系统分级策略和分级自治运行策略。
2.1. 微电网系统状态分级策略
本文提出了系统状态分级模型量化系统运行状态,帮助CMG辨识系统运行状态。该模型首先应该能够判断系统“健康正常”与“非健康非正常”两种状态。系统有主电源时,微电网运行于健康正常状态,系统丢失主电源时,系统运行于非健康非正常状态,因此可采用孤岛检测结果作为系统健康正常与非健康正常的判断条件。其次,微电网运行于健康正常状态时,根据系统负载情况可以分为系统重载、系统轻载与系统良好运行三种情况。
图1显示了在过渡状态下的系统频率和变化率的仿真结果,当微电网失去主电源后,由于CMG逆变器失去参考信号,系统将不稳定,频率的变化率会增大,若变化率超过阈值e即可判定系统为无主电源的非健康正常状态,可以表示成式(1),否则微电网在主电源支撑下稳定运行。
(1)
系统处于健康状态时,系统健康状态评估模型的主要指标包含电压偏差 、频率偏差 。根据系统负荷情况,设定系统健康状态分级式:
(2)
其中,UN和fN分别为电压和频率的额定值;分别为电压和频率的偏差百分比。k1、k2分别为电压、频率偏差百分比,表达式如下:
(3)
其中,Ui和fi表示在当前时刻的不同时间点的电压和频率;n是时间点的个数;5%和0.4% (频率允许偏差为0.2 Hz)分别为系统电压和频率的允许偏差率。
根据上述内容建立系统健康状态分级表,如表1所示。
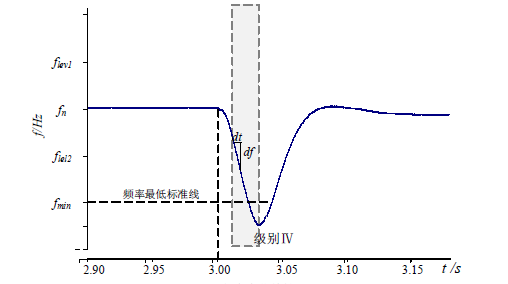 (a) 频率变化特性
(a) 频率变化特性
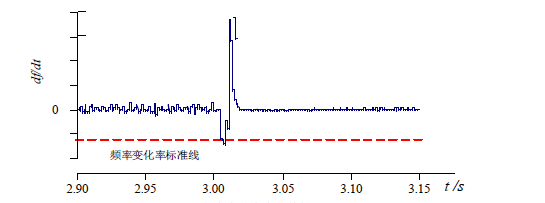 (b) 频率变化率变化特性
(b) 频率变化率变化特性
Figure 1.Characteristics of system frequency and its changing rate
图1. 孤岛瞬间频率变化特性

Table 1. Grading results of system states
表1. 系统状态级别表
2.2. 微电网分级自治运行策略
根据微电网运行状态,系统健康状态共分为四种级别。如图2所示。
1)系统状态级别I:微电网运行于良好状态,供需基本平衡,各单元控制策略不发生变化;
2)系统状态级别II:系统重载,主电源的容量已经不能满足负荷需求,系统级别较低,启动分时调节策略,最优调节电源切换至倒下垂控制策略,承担一部分功率调节任务,反相微调系统电压频率;
3)系统状态级别III:系统轻载,表明系统发电功率过剩,系统电压、频率可能超过最高允许值,启动分时调节策略,最优调节电源切换至最小功率控制,以提高系统经济性;
4)系统状态级别IV:微电网缺少主电源,系统运行于不稳定状态,启动分时调节策略,最优调节电
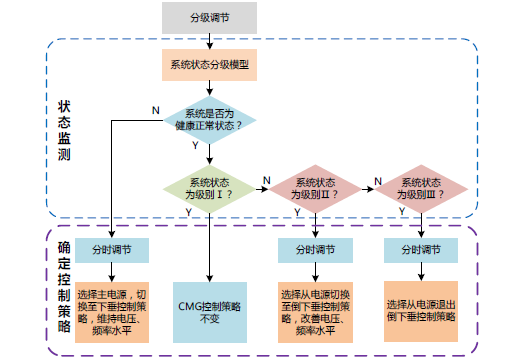
Figure 2.Schematic diagram for grading regulation strategy
图2. 分级调节流程示意图
源切换至下垂控制策略,实现系统电压、频率的快速恢复,维持系统电压水平。
3. 基于CSMA/CD机制的微源分时调节策略
分时调节策略的核心内容是基于CSMA/CD的竞争机制,该机制可以实现微电网没有通信网络的情况下,从多个CMG中选择出最优调节电源,并根据系统状态级别切换至相应的控制策略,从而保证CMG有序竞争,降低多个电源同时改变控制策略对系统的冲击,提高系统运行稳定性。
3.1. CSMA/CD竞争机制
CSMA/CD是一种应用于以太网、争用型的介质访问控制协议,它主要通过载波侦听、冲突检测、退避重发等环节实现多个通信节点在没有实现商议的前提下有序使用公用信道。在微电网中,可将CMG看作通信节点,将CMG竞争最优调节电源等效为通信节点占用公用信道,通过冲突检测、微源调节策略、退避等待等环节,在无通信情况下确定微电网最优调节电源控制权。
表2为CSMA/CD竞争机制在微电网与传统以太网中的比较。通信系统与微电网具有显著的差异,这种比较不能一一对应,例如在传统以太网中信息通道发生占用冲突时,节点信息随机延时后重发即可,不会对以太网造成危害,但是在微电网失去主电源后,其他电源判断系统无主电源时刻几乎相同,此时多个CMG会同时成为主电源,微源调节策略环节可能会同时退出主电源模式,将危及系统稳定性。本文规定分时调节策略启动后,各CMG先退避再检测,即各CMG首先退避一段时间,退避期间控制策略维持不变,退避结束后再次判断系统健康状态是否改善,最后根据判断结果确定是否需要改变控制策略。
3.2. 微源分时调节策略
如图3所示,分时调节策略由退避等待、冲突检测、微源调节策略三个模型组成。退避等待模型包括退避时间算法和延时模块,CMG在退避等待阶段维持控制策略不变,经冲突检测模块判断系统健康状态是否发生改善,结合判断结果确定微源控制策略。
Table 2. Analogies and comparisons of CSMA/CD in microgrid and Ethernet
表2. CSMA/CD竞争机制在微电网和以太网的对比
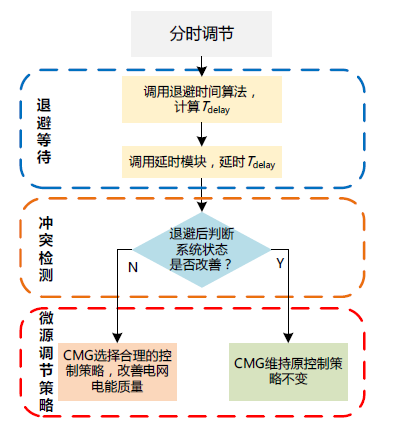
Figure 3.Schematic diagram for time-sharing regulation strategy
图3. 分时调节流程示意图
3.2.1. 退避等待模型
退避时间算法的主要内容是用退避时间的长短来描述CMG参与系统调节能力的优先级的高低。该时间与系统状态级别、CMG经济成本、容量、运行状态等因素相关。这样,使功率分配既考虑可调微电源的经济性,也考虑了系统稳定运行的合理性。一般来说,系统状态级别为IV时,系统运行状态最恶劣,为了实现微电网快速恢复安全稳定运行,各单元退避时间最短。由于系统状态级别变化至IV的过程中,会经过级别II或者级别III,为了避免CMG调节紊乱,退避时间可以较长。
据上所述,退避时间表达式如式(1)所示。
(4)
其中,t0、k是为了避免分时调节误动所设的时间常数和增益系数,t0、k越大,系统稳定性越好。Tmax是CMG退避时间的最大值,T[m,n]为CMG退避时间的基本单元,n为CMG的数量,m是CMG的退避次数
tR是为了防止多个CMG的退避时间是出现相同。虽然通过增加tR冲突的概率可以降低,但每个CMG的响应时间会相应增加,从而影响系统的稳定性。相反通过减少tR,可以减少每个CMG的响应时间,但是冲突的可能性会增加。因此,考虑响应时间和系统稳定性,tR设置如下。
其中,0.002设置为响应时间和系统稳定性的折中。T[m,n]可以表示成形式:
(5)
其中,Km为逆时判断法的值,Am为退避因子,取值范围为(0,1);Tresponse[n]为CMG逆变器响应时间,与实际系统的参数有关。式(3)、(4)为约束条件,系统频率跌至fmin最低标准线时,停止退避,CMG立即参与系统调节。
具体来说,Km定义了系统电压和频率的偏差,从之前的TSRS完成动作t0时刻到当前时刻t1,Km表示如下:
(6)
对于储能单元,
(7)
(8)
式中,PN为储能单元额定功率,P为当前输出功率值,SOC为储能单元的荷电状态,PTotal为系统CMG总额定功率,STotal为存储单元的总额定容量。α为功率裕度因子,表征逆变器工作状态对退避时间的影响;β为能量裕度因子,表征储能剩余容量对退避时间的影响;γ为稳定裕度因子,表征CMG额定功率对退避时间的影响。上述参数涉及特征参数、价格等因素,与实际系统相关。
由于微型燃气轮机、柴油机等单元为传统发电单元,经济性较差、启动时间比较长,在参与主电源竞争时优先级最低,置Am = 1。为了减少传统能源的使用,此类电源在初始运行时一般为停机状态,系统首次调整时才启动进入热备用状态,等待下一次调节。
3.2.2. 冲突检测模型
冲突检测模型的主要作用是帮助CMG辨识微电网中是否已经优先级较高的CMG被选为最优调节电源。将tk时刻系统状态指标与tk-1时刻状态指标比较,若系统指标变好,则说明已经有其他单元参与到系统调节,该CMG维持控制策略不变,否则该CMG可以动态调节系统状态。
在系统确实主电源的特殊情况下,从最优调节电源切换控制策略到系统频率、电压特性开始恢复存在一定的延迟,在这段时间内,可能仍有CMG判断系统状态正在恶化而切换至主电源模式,系统将出现频率振荡。将系统频率振荡作为冲突检测的判断依据,当系统出现频率振荡,后投入下垂控制的电源退出主电源运行模式,保证微电网主电源的唯一性。
3.2.3. 微源调节策略
系统状态级别I:各单元控制策略不变。
系统状态级别II:最优调节电源切换至倒下垂控制策略,反相微调电压、频率。
系统状态级别III:最优调节电源退出倒下垂控制策略,切换至最小功率控制策略。
系统状态级别IV:最优调节电源切换至下垂控制策略,支撑微电网恢复稳定。
为了保证微电网运行安全、延长储能类CMG寿命,主电源出现以下情况退出主电源运行模式:
1) 主电源持续输出大于等于额定功率,切换至额定功率输出;
2) 主电源为储能单元时,荷电状态达到安全下限SOCmin,切换至最小功率输出。
4. 基于分级和分时调节的自主控制策略
本节重点讨论微电网的自主控制策略。图4显示了该策略的配置,其中包含了主电源控制原则和两个子策略:分级调节策略和分时调节策略。
1) 主电源控制策略是微电网运行期间只有一个主电压源,并且主电源采用下垂控制策略保证维持系统电压和频率。因此,在下垂控制下,由多个并行电源引起的电流环流可以得到有效抑制。
2) 分级调节策略综合考虑的多个CMG局部信息(如电压、频率和变化率)对系统状态进行评估,并将系统状态分为4级:一级(正常状态)、二级(重载状态)、三级(轻负荷状态)和四级(紧急状态)。如果系统运行在一级,多个CMG将保持他们的控制策略。否则,CMG与最优调节电源将调整自己的控制策略以稳定整个系统。系统状态将由多个CMG的周期性调节最终转化为一级。
3) 分时调节策略规定了调节优先级的CMG退避时间算法,当系统运行时异常状态(水平II,III和IV)时选择出最优调节电源。它来源于CSMA/CD竞争机制。基于分时调节策略,使功率裕度大、输出能力强、经济性高的CMG单元参与系统调节的优先级高。最优调节电源将由分时调节策略选择,并根据分
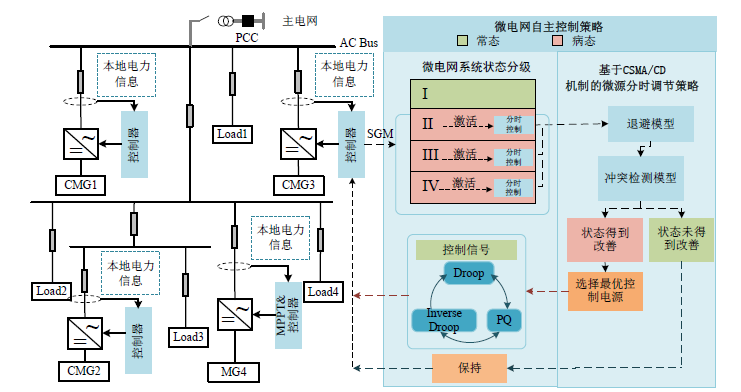
Figure 4.Configuration of the proposed autonomous control strategy
图4. 微电网的自主控制策略框图
级调节策略中定义的规则调整其控制策略,当系统运行在异常状态时,一个CMG转换成最优调节电源,其他CMG保持其控制策略,在短时间内存在,类似于死区时间。如果频率或电压的变化是瞬态的,则最优调节电源的控制动作的开关可以在死区时间避免。这样有利于系统的稳定性。
5. 模型仿真与算例分析
5.1. 仿真系统模型
本文根据图5于PSCAD/EMTDC仿真平台建立的微电网仿真系统,其额定电压为380 V,额定频率为50 Hz。各微源参数见表3,负荷规模为60~100 kW,各CMG建立的系统状态分级模型中e = 50,k1 = 5%,
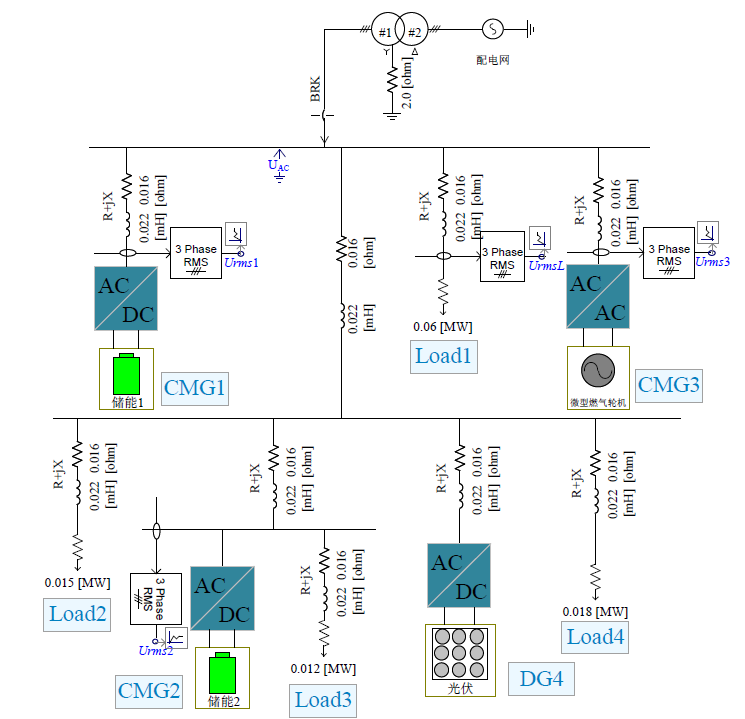
Figure 5.Simulation system of a microgrid
图5. 微电网仿真系统
Table 3. Parameters of micro-sources
表3. 微电源参数表
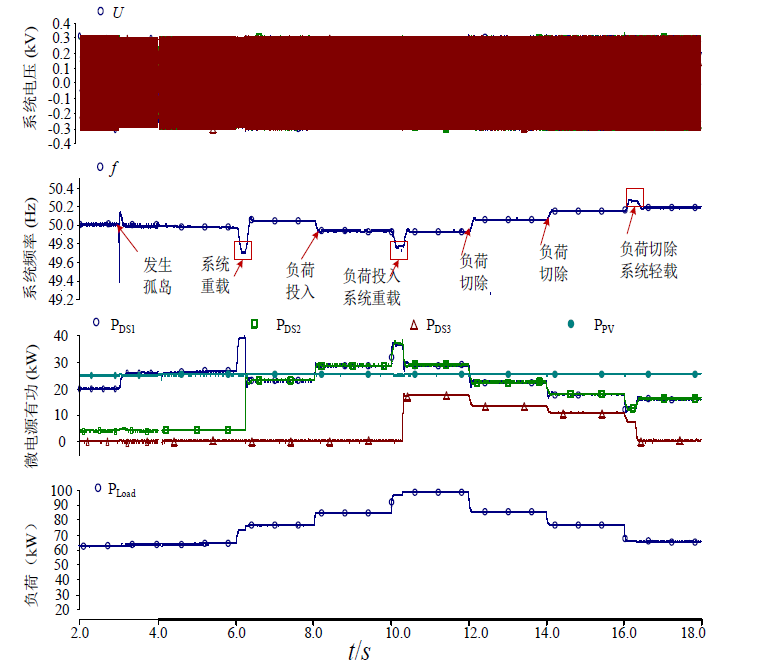
Figure 6.Micro-grid waveforms of simulation
图6. 微电网运行特性
k2 = 0.4% [20] [21] [22] 。各CMG退避等待模型中,对于DS1/DS2而言,a = 0.4,b = 0.25,g = 0.35,Tresponse[n] = 0.01 s,Tmax = 0.03 s,t0 = 0.1 s,k = 5。
5.2. 分级调节策略
为验证自治控制策略的有效性和可行性,对微电网运行做出如下假设:微电网初始运行于并网状态,其中,DS2、DS3为热备用状态,DS1、PV恒功率输出,负荷为60 kW;3 s时微电网发生非计划孤岛,微电网由并网过渡到孤岛运行系统。系统运行6 s时,15 kW负荷投入并于16 s切除;8 s时,12 kW负荷投入并于14 s切除;10 s时,18 kW负荷投入并于12 s切除,由于仿真时间较短,储能单元容量较大,仿真中忽略储能单元SOC变化,系统仿真波形如图6所示。
由图6可知,在微电网自治策略作用下,微电网发生孤岛时,经分时调节,DS1优先获得主电源控制权,切换至下垂控制,可以在较短时间内实现系稳定运行。在孤岛运行期间,随着负荷变化,系统健康状态发生变化。系统重载时,经分时调节,DS2优先于微型燃气轮机切换至倒下垂控制,与DS1共同分担功率缺额,改善微电网电能质量;系统轻载时,经分时调节,作为传统电源的DS3优先退出倒下垂控制,提高系统经济运行。下文对系统并离网切换、系统重载、轻载等情况下的分时调节过程进行介绍。
5.3. 分时调节策略
1) 微电网由并网转孤岛运行
微电网3 s时发生脱网运行,由图7(c)可知3.0054 s检测到系统状态由级别I变为级别IV,启动分时
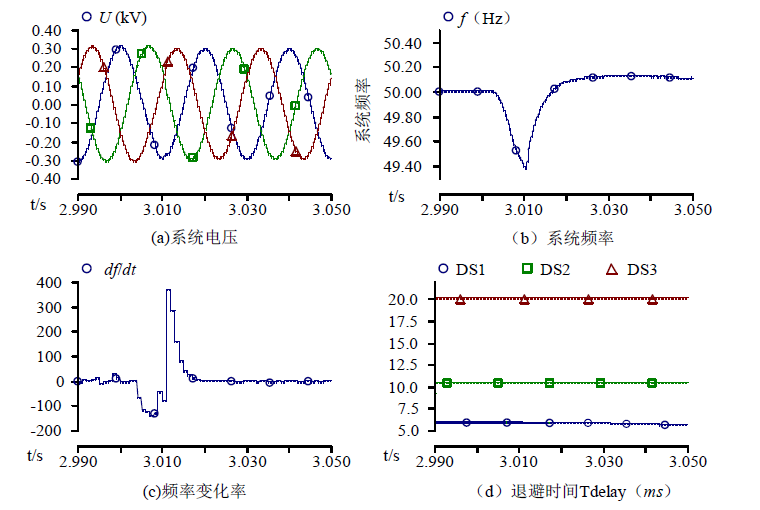
Figure 7. The simulation waveform for on-grid and off-grid
图7. 微电网并离网切换暂态仿真波形
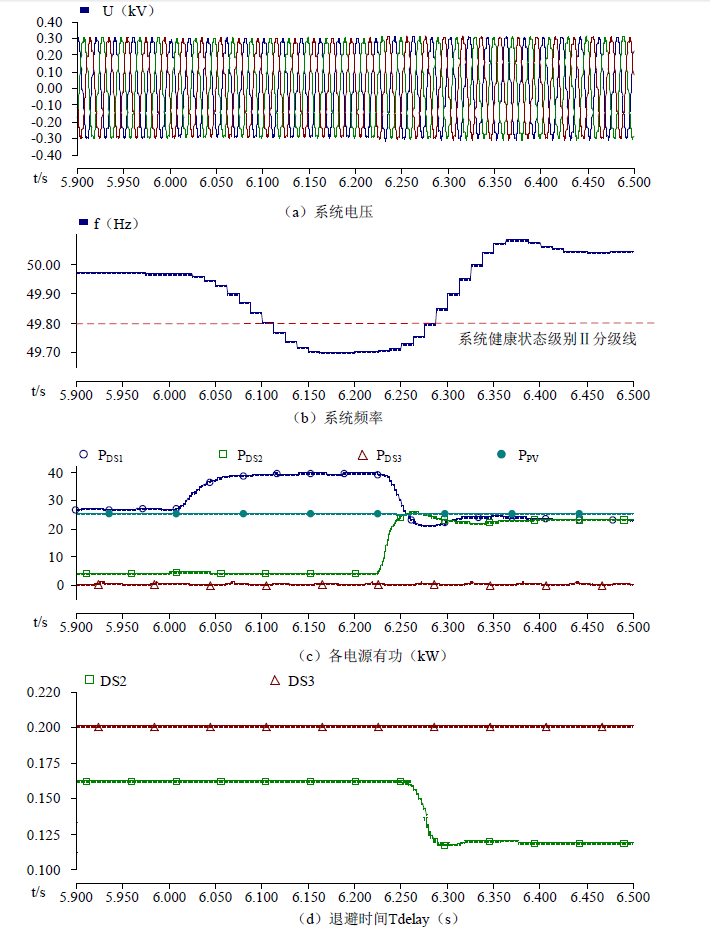
Figure 8. System overload simulation waveform with time-sharing regulation strategy
图8. 系统重载时分时调节仿真波形
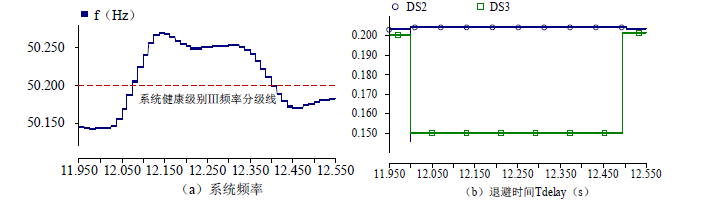
Figure 9. System light-load simulation waveform with time-sharing regulation strategy
图9. 系统轻载时分时调节仿真波形
调节。由退避时间算法结果可知DS1退避时间最小,即经11 ms DS1再次判断系统状态仍处于级别IV,并且状态指标持续恶化,说明系统缺失主电源,快速切换至下垂控制,DS1竞争主电源地位成功。3.016 s时刻DS2退避结束后判断系统状态已改善,则继续维持浮充状态,同理,DS3维持原状态并等待下次调节。
根据仿真结果可知,当微电网失去主电源时,额定功率大、具备较强输出能力的CMG退避时间较短,能够优先成为主电源,其他CMG在判断系统健康状态已改善,得知已有CMG投入主电源运行模式,继而维持前一刻控制策略不变,保证了微电网运行周期有唯一主电源。当前主电源退出运行时,启动新一轮分时调节,其他CMG再次竞争主电源,将微电源由传统的共同出力改进为轮流出力,有利于提高微电网的经济性。
2) 系统重载
系统运行6 s时15 kW负荷投入,由图8(b)可知6~6.1 s期间,CMG判断系统状态持续为级别II,启动分时调节。DS2退避0.1554 s后再次判断系统运行状态,此时系统健康状态持续处于级别II,则切换至倒下垂控制策略,并按照倒下垂曲线进行功率输出,增发功率约20 kW,系统频率水平得到改善。DS3则继续维持热备用状态。
3) 系统轻载
系统运行至16 s,由图9(a)可知,系统频率较高,系统状态为级别III,经分时调节,DS3优先退出倒下垂控制策略,从而使得频率特性符合要求。
6. 结语
本文针对无通信情况下、多个电源协调稳定运行控制的问题,提出了基于系统状态分级与CSMA/CD机制的微电网自治控制策略,包括基于本地信息的系统状态分级模型,CMG依据该模型辨识系统运行状态,并根据辨识结果自主决定运行模式,动态参与系统调节。在调节过程中,提出了基于CSMA/CD的竞争机制,避免了CMG无序投运造成的系统环流等问题,提高了系统运行稳定性。算例仿真结果表明,各CMG可以在没有通信情况下合理分配有功功率、无功功率,实现微电网自治运行。
本文建立的系统健康状态评估模型较为简单,可能不足以全面衡量系统运行状态,提出更为准确、灵敏的综合评估方法将是今后的研究目标。
基金项目
国家重点研发计划(2016YFB0900500)。
文章引用
杨永进. 基于系统状态分级与CSMA/CD机制的微电网自治控制策略研究
A Decentralized Control in Microgrid: An Autonomous Control Strategy Derived from CSMA/CD Mechanism[J]. 输配电工程与技术, 2018, 07(01): 7-20. https://doi.org/10.12677/TDET.2018.71002
参考文献
- 1. EPRI (2003) Power Delivery System and Electricity Markets of the Future. EPRI, Palo Alto, CA.
- 2. 李振杰, 袁越. 智能微网——未来智能配电网新的组织形式[J]. 电力系统自动化, 2009, 33(17): 42-48.
- 3. Guerrero, J.M. (2009) Control Strategy for Flexible Microgrid Based on Parallel Line-Interactive UPS Systems. IEEE Trans on Industry Electronics, 56, 726-736. https://doi.org/10.1109/TIE.2008.2009274
- 4. 王成山, 肖朝霞, 王守相. 微网中分布式电源逆变器的多环反馈控制策略[J]. 电工技术学报, 2009, 24(2): 100-107.
- 5. Georgakis, D., Papathanassiou, S., Hatziargyriou, N., et al. (2004) Operation of a Prototype Microgrid System Based on Micro-Sources Equipped with Fast-Acting Power Electronics Interfaces. PESC Record, 4, 2521-2527.
- 6. Alotibe, M.S. and Chandrasena, R. (2012) Simplified Voltage and Frequency Controller Based on Droop Control for the Dynamic Analysis of a Microgrid. Universities Power Engineering Conference (AUPEC), 2012 22nd Australasian, 26-29 September 2012, 1-8.
- 7. Chandorkar, M.C., Divan, D.M. and Adapa, R. (1993) Control of Parallel Connected Inverters in Standalone AC Supply Systems. IEEE Transactions on Industry Applications, 29, 136-143. https://doi.org/10.1109/28.195899
- 8. 牟晓春, 毕大强, 任先文. 低压微网综合控制策略设计[J]. 电力系统自动化, 2010, 34(19): 91-96.
- 9. Li, Y.W. and Kao, C.-N. (2009) An Accurate Power Control Strategy for Power-Electronics-Interfaced Distributed Generation Units Operating in a Low-Voltage Mutibus Microgrid. IEEE Transactions on Power Electronics, 24, 2977-2988. https://doi.org/10.1109/TPEL.2009.2022828
- 10. 林恒伟. 自治微电网中分布式电源的控制策略研究[D]. 河北: 燕山大学, 2013.
- 11. 鲍薇, 胡学浩, 李光辉, 等. 提高负荷功率均分和电能质量的微电网分层控制[J]. 中国电机工程学报, 2013, 33(34): 106-114.
- 12. Guerrero, J.M., Castilla, M. and Miret, J. (2007) Decentralized Control for Parallel Operation of Distributed Generation Inverters using Resistive Output Impedance. IEEE Transactions on Industrial Electronics, 54, 994-1004.
- 13. 张纯江, 阚志忠, 孟晓脉, 等. 基于下垂控制的自治微电网建模与稳定性分析[J]. 电力电子技术, 2012(10): 23-26.
- 14. Lu, X., Sun, K., Guerrero, J.M., et al. (2012) SOC-Based Droop Method for Distributed Energy Storage in DC Mi-crogrid Applications. IEEE International Symposium on Industrial Electronics, Hangzhou, 28-31 May 2012, 1640-1645.
- 15. 陆晓楠, 孙凯, 黄立培, 等. 孤岛运行交流微电网中分布式储能系统改进下垂控制方法[J]. 电力系统自动化, 2013(1): 180-185.
- 16. 陆晓楠, 孙凯, 黄立培, 等. 直流微电网储能系统中带有母线电压跌落补偿功能的负荷功率动态分配方法[J]. 中国电机工程学报, 2013(16): 37-46.
- 17. 纪明伟, 张兴, 杨淑英. 基于电压源逆变器的微电网控制策略[J]. 合肥工业大学学报(自然科学版), 2009, 32(11): 1678-1682.
- 18. 纪明伟. 分布式发电中微电网技术控制策略研究[D]: [硕士学位论文]. 合肥: 合肥工业大学, 2009.
- 19. 张项安, 张新昌, 唐云龙, 等. 微电网孤岛运行的自适应主从控制技术研究[J]. 电力系统保护与控制, 2014, 42(2): 81-86.
- 20. 吴栋伟, 窦晓波, 吴在军, 等. 孤岛模式下基于快速储能投退机制的微电网多源协调控制[J]. 电力系统自动化, 2013(1): 174-179.
- 21. GB12325-90. 电能质量供电电压允许偏差[S].
- 22. GB/T15945-1995. 电能质量电力系统频率允许偏差[S].