Dynamical Systems and Control
Vol.06 No.03(2017), Article ID:20935,11
pages
10.12677/dsc.2017.63013
Study on Obstacle Avoidance Flight System of Multi-Rotor UAV Based on Pixhawk
Hang Zhao, Lifeng Wang
Field Bus Technology & Automation Lab, North China University of Technology, Beijing

Received: May 2nd, 2017; accepted: Jun. 10th, 2017; published: Jun. 13th, 2017

ABSTRACT
Autonomous obstacle avoidance is an important guarantee for the successful completion of the mission, and it reflects the intelligence and security of the aircraft. This article aims to study the obstacle avoidance technology of multi-rotor UAV based on the cross type quadrotor and Pixhawk which is the open source flight control system. A simple and efficient obstacle avoidance system is developed. The flight test shows that the obstacle avoidance system can realize the obstacle avoidance of UAV.
Keywords:Pixhawk, Quadrotor, Obstacle Avoidance
基于Pixhawk的多旋翼无人机避障 飞行系统研发
赵航,王立峰
北方工业大学现场总线技术及自动化实验室,北京
收稿日期:2017年5月2日;录用日期:2017年6月10日;发布日期:2017年6月13日

摘 要
飞行器的自主避障是顺利完成飞行任务的重要保证,同时在很大程度上体现了飞行器的智能性和安全性。本文以Pixhawk开源飞控系统为基础,以“X”型四旋翼飞行器为平台,对多旋翼飞行器自主避障技术进行研究,开发出一款简单高效避障系统。飞行试验表明该避障系统可实现飞行器避障飞行。
关键词 :Pixhawk,四旋翼飞行器,避障

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
近年来,多旋翼无人机因其机动灵活、垂直起降、自主飞行等特性,在军用领域、农业领域和工业领域等方面得到了广泛的应用。然而,由于飞行环境与飞行任务的日趋复杂化,无人机在执行飞行任务中遇到障碍物时,如何实现快速高效的避障,保证无人机的安全性,提高无人机的智能性,正成为无人机发展的趋势。
国内外很多学者和无人机公司对多旋翼飞行器避障系统进行了研究,例如文献 [1] 基于Arduino UNO采集超声波数据和遥控器信号,并根据超声波测量的数据对遥控信号进行逻辑判断后,发送给飞控系统进行避障,该避障系统具备多适配性的特点。文献 [2] 对无人机编队避障方法进行研究,首先通过构建Voronoi图,利用K路径算法为无人机找到多条备选路径,然后建立协同函数,为无人机规划出最优的障碍物规避航迹。文献 [3] [4] 针对无人机电力巡线过程中避障和路径规划问题进行研究。文献 [5] 基于Pixhawk和改进人工势场法(IAPF),提出适用于桥梁检测的无人机自动避障路径规划和实现。文献 [6] [7] 采用多传感器数据融合,检测飞行器周围环境信息,对飞行器避障飞行以及航迹规划进行研究。另外,国内外各大无人机公司相继推出具备避障功能的飞行器,如零度“Xplorer 2”、DJI“Guidance”、昊翔“Typhoon H RealSense”等。
本文以Pixhawk开源飞控系统为基础,并以“X”型四旋翼飞行器为平台,对多旋翼飞行器如何实现自主避障进行研究。
2. 系统架构整体设计
本文无人机避障系统整体实现流程如图1所示,其中,测距传感器采用HC-SR04超声波传感器,实时检测飞行器周围环境信息;基于Arduino Mega2560开发板,设计出一款带有CAN总线和串口两种通讯接口的数据采集模块,用于采集超声波数据和实现与Pixhawk飞控的通讯;在搭载APM飞行控制栈的Pixhawk飞控系统中完成上层避障应用的开发。

Figure 1. Flow chart of obstacle avoidance
图1. 避障实现流程图
3. 硬件设计
本文基于Arduino Mega2560开发板,设计出一款带有CAN总线接口和串口的数据采集模块,主要完成两方面的工作:1. 采集超声波数据;2. 通过CAN总线或串口的方式与Pixhawk飞控进行通讯,完成数据交换。图2为主芯片Atmega2560外围电路、串口和超声波接口原理图。
CAN总线接口实现如图3所示,其中,CAN控制器采用MCP2515,通讯速率可达1 Mb/s,通过SPI的通讯方式与MCU连接;CAN收发器采用TJA1050,可为总线提供差动发送性能,为CAN控制器提供差动接收性能。
模块还挂载有ATmega16u2芯片用于虚拟一个USB-Serial转换器,可实现模块与计算机的通信和程序下载。
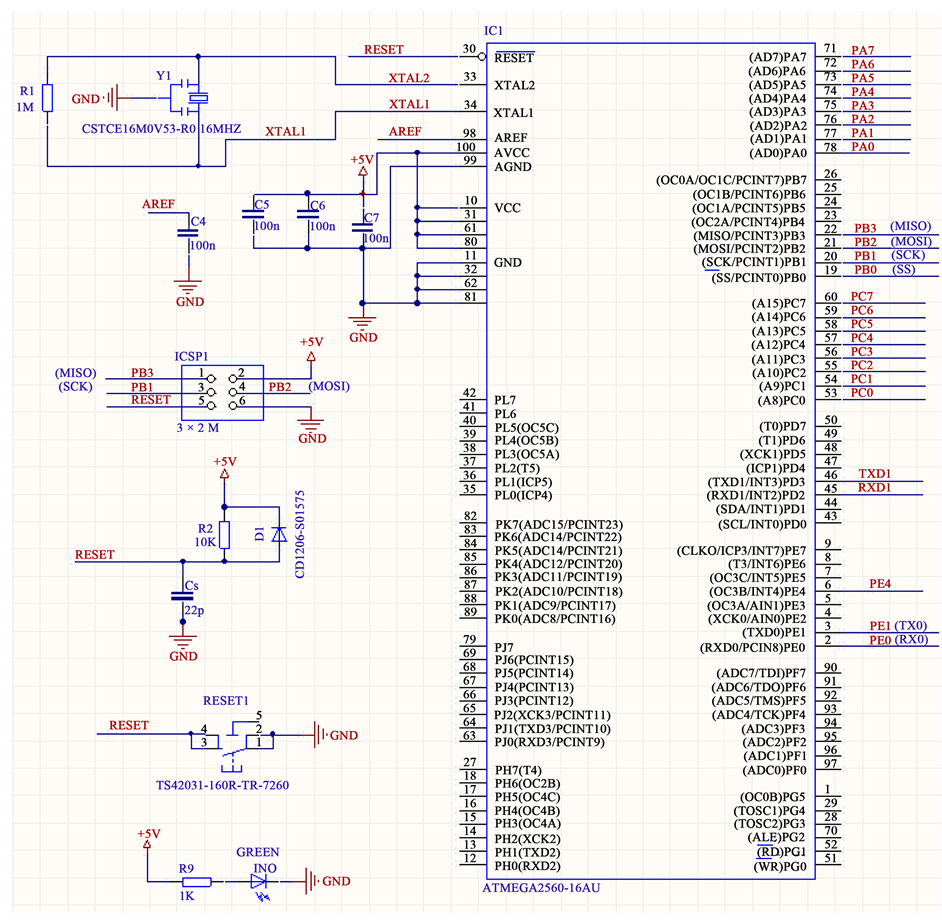
Figure 2. Serial port and ultrasonic interface diagram
图2. 串口和超声波接口图

Figure 3. CAN interface diagram
图3. CAN总线接口图
4. 软件设计
4.1. 超声波数据采集与发送
本文使用Arduino进行超声波数据采集和发送。选用的超声波模块为HC-SR04,可实现对2 cm~450 cm距离内平面相对比较平整的物体进行检测。该模块有四个引脚,分别为Trig、Echo、VCC、GND。首先定义Trig、Echo端连接的引脚;进行串口初始化,设置串口通信波特率;配置Trig引脚为输出,Echo引脚为输入,并在loop()循环中对trig引脚持续输出10 us高电平,获得echo引脚高电平持续的时间;计算超声波传感器测量的距离;调用滤波器,对测量的数据进行滤波处理;串口输出滤波后的数据,具体实现流程如图4所示。
4.2. Pixhawk串口接收
1. 自定义主题
Pixhawk飞控系统中封装了一个跨平台无锁publish/subscribe模式的对象请求代理(uORB),用于完成进程间通信和数据交换。uORB将进程间通信的数据命名为“主题”,“主题”中定义了通信的数据结构,通过“主题”的发布和订阅完成进程间的数据交换,如图5所示。Pixhawk飞控系统中所有通用接口标准主题全部定义在ardupilot/modules/PX4Firmware/msg目录下的.msg文件中,编译飞控程序过程中,

Figure 4. Flow chart of distance measurement
图4. 测距流程图

Figure 5. Topic publish/subscribe
图5. 主题发布/订阅
通过调用工具Pyhton,检索该目录下的.msg文件,并以msg.h.template文件中定义的模板,将所有.msg文件转换生成.h文件,并保存在目录PX4Firmware/src/modules/uORB/topics下,该msg.h实现对主题的数据结构定义,通过调用ORB_DECLARE()完成了主题的声明。
本文使用的是自定义主题,则需要在ardupilot/modules/PX4Firmware/msg目录下新建一个名为serial_sonar.msg文件,在该文件中定义Pixhawk串口接收到所有超声波数据。
2. 定义主题
主题的发布需完成三个独立又相关联的动作:调用ORB_DEFINE()定义主题;调用orb_advertise()公告主题;调用orb_publish()发布主题。
Pixhawk中所有标准主题的定义均封装在 ardupilot/modules/PX4Firmware/src/modules/uORB/objects_common.cpp文件中,则本文需要在该文件中完成serial_sonar主题定义。
3. 创建新的任务进程
Pixhawk飞控系统使用具有多任务特性的NuttX实时操作系统,在飞控上电之后,NuttX完成底层任务、设备等初始化工作。Pixhawk飞控系统将所有的任务以模块化的形式进行封装,均在ardupilot/modules/PX4Firmware/src/module目录下。本文需要在该目录下创建一个新的任务模块文件夹,并在该文件夹中定义任务实现文件和.mk文件。任务实现文件中通过调用px4_task_spawn_cmd()函数创建新的任务进程。其中,在入口函数中完成了串口配置、波特率设置、主题公告和发布等工作,具体实现流程如图6所示。而在.mk文件中需要定义该模块编译指令MODULE_COMMAND和依赖文件,以便在编译飞控程序时进行调用和执行。

Figure 6. Flow chart of Pixhawk serial port program
图6. Pixhawk串口接收程序流程图
4. 加入Pixhawk编译系统
Pixhawk借助make工具实现对飞控程序的编译。Makefile文件中定义了程序编译规则、文件包含和调用关系等。在px4_targets.mk文件中,有以下这样几行程序,规定了飞行固件编译需要哪些底层驱动及任务模块。

本文以“X”型四旋翼飞行器为飞行平台,其固件编译指令为make px4-v2,在解析编译指令的过程中确定了飞控板类型为px4fmu-v2,则上述程序最终只执行config_px4fmu-v2_APM.mk文件中包含的内容。则本文需要在该mk文件中,加入自定义的串口接收任务模块。
4.3. 上层避障实现
上层避障指的是如何在悬停模式(Loiter)下实现飞行器避障飞行,需要解决的问题有:1. 如何将接收到的超声波数据传输至ArduPilot应用中;2. 如何在Loiter飞行模式下编写具体的避障控制逻辑。
ArduPilot应用程序接收超声波数据具体实现流程如图7所示。
1. Pixhawk飞控系统依赖的库可以分为三类:核心库,如AP_AHRS捷联惯导库、AP_Motors电机控制信号解算库、AC_AttitudeControl姿态位置控制库等;传感器库,如AP_InertialSensor陀螺仪和加速度计数据读取库、AP_Baro气压计接口库等;其他库,如AP_Mission用于EEPROM数据存储库、AP_Camera摄像机控制库等,这些库文件集中在ardupilot/libraries目录下。而在ardupilot/ArduCopter目录下有make.inc这样一个文件,该文件中定义了飞控系统所依赖的所有库文件,同时在sketch_sources.mk文件中有如下程序,完成make.inc文件中库列表解析,并将所有库的源文件包含进编译系统中。


Figure 7. Flow chart
图7. 流程图
本文首先需要在ardupilot/libraries目录下创建新的AP_SerialSonar超声波传感器接口库,定义AP_SerialSonar类和get_sonar_data()接收超声波数据函数,其实现流程如图8所示。首先,在AP_SerialSonar类初始化时,调用orb_subscribe()订阅主题,通过px4_poll()监控px4_pollfd_struct_t结构体指定的文件描述符,当出现有数据可读(POLLIN)合法事件时,调用orb_copy()获取订阅的主题中的数据并将该数据保存到指定的buffer中。
其次,将AP_SerialSonar库加入到飞控编译系统中,即在make.inc文件中添加LIBRARIES+ = AP_SerialSonar。
2. Pixhawk中所有类声明全部封装在ardupilot/ArduCopter/Copter.h,而飞行控制栈初始化工作在init_ardupilot()中完成,为保证系统完整性和统一性,本文需要在以上两个地方完成AP_SerialSonar类声明和初始化。
3. 在飞行控制栈的列表任务调度器中,添加新任务用于更新接收的超声波数据。本文添加的新任务为SCHED_TASK(update_serial_sonar,10,100),其中任务名为update_serial_sonar,调用频率为10 Hz,期望运行最长时间为100 ms。
4. 添加完新任务之后,需要在ArduCopter.cpp中定义任务的具体实现。调用AP_SerialSonar类中用于接收超声波数据的函数get_sonar_data(),并赋值给预先定义好的全局变量,具体实现流程如图9所示。
本文旨在使飞行器具有快速高效的避障功能,具体实现为飞行器采取向上逃逸模式进行避障,即飞行器检测到障碍物时,飞行器尽快处于悬停状态,然后垂直向上飞行,具体实现流程如图10所示。
Loiter飞行模式下首先将roll、pitch通道输入转换成期望的加速度,raw通道输入转换成偏航角速率,throttle通道输入转化成飞行器的爬升速率,然后调用水平位置控制器、高度控制器和姿态控制器完成对飞行器姿态解算和定点控制。本文飞行避障实现流程首先是在获取滚转和俯仰通道输入之前,对飞行器周围环境进行检测,当检测到障碍物时,进一步对飞行器飞行速度进行判断,如果飞行速度不为零,则将滚转和俯仰通道输入强制置零,使飞行器尽快处于悬停状态;如果飞行器本身就处于悬停状态,则增加油门通道输入值,提高飞行器飞行高度,从而实现飞行避障。

Figure 8. get_sonar_data() flow chart
图8. get_sonar_data()流程图

Figure 9. flow chart
图9. 流程图
开发的避障系统相继在Stablize、AltHold、Loiter飞行摸下完成了避障测试,通过Mission Planner观察当飞行器检测到障碍物时,电机输出的情况,图11~图13为避障测试效果图。

Figure 10. Obstacle avoidance flow chart
图10. 避障流程图

Figure 11. Obstacle avoidance chart of Stablize flight mode
图11. Stablize模式下避障效果图
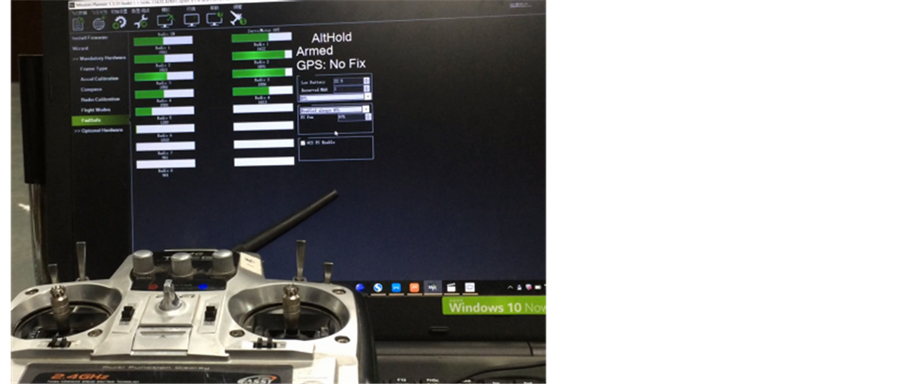
Figure 12. Obstacle avoidance chart of AltHold flight mode
图12. AltHold模式下避障效果图
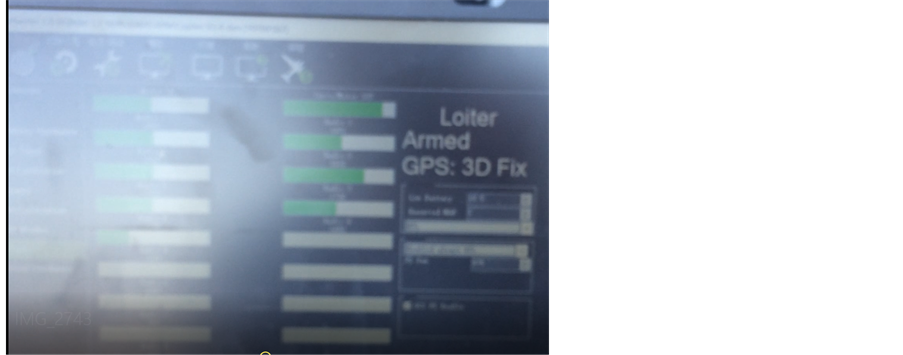
Figure 13. Obstacle avoidance chart of Loiterflight mode
图13. Loiter模式下避障效果图
5. 结论
本文基于Pixhawk飞控系统,以“X”型四旋翼飞行器为平台,经过多次飞行试验验证,开发的避障系统可以实现飞行器避障功能,具备一定的实用性。
文章引用
赵 航,王立峰. 基于Pixahwk的多旋翼无人机避障飞行系统研发
Study on Obstacle Avoidance Flight System of Multi-Rotor UAV Based on Pixhawk[J]. 动力系统与控制, 2017, 06(03): 98-108. http://dx.doi.org/10.12677/dsc.2017.63013
参考文献 (References)
- 1. 王力群, 林朝辉. 基于Arduino UNO平台的多适配性无人机避障技术[J]. 科技创新导报, 2016(9): 18-19.
- 2. 周炜, 魏瑞轩, 董志兴. 基于层次分解策略无人机编队避障方法[J]. 系统工程与电子技术, 2009, 31(5): 1152-1157.
- 3. 徐华东. 无人机电力巡线智能避障方法研究[J]. 南京航空航天大学, 2014.
- 4. 郑天茹, 王滨海, 刘俍, 王骞, 张晶晶. 电力巡线无人直升机障碍规避系统[J]. 山东电力技术, 2012(1): 14-17.
- 5. 袁栋, 陈旭芳, 郁乐乐. 基于PIXHAWK和IAPF法桥检无人机避障[J]. 低温建筑技术, 2017, 39(2): 40-42.
- 6. 任耀庭. 基于超声波测距与图像信息相融合的旋翼无人机避障算法研究[J]. 电子科技大学, 2016.
- 7. 杨淑媛. 旋翼无人机室内自主避障飞行研究[J]. 山西工程职业技术学院, 2016(6): 86-88.