Advances in Applied Mathematics
Vol.
10
No.
04
(
2021
), Article ID:
41884
,
10
pages
10.12677/AAM.2021.104117
基于广义Lyapunov方法的植物传染病模型的全局动力学
冷 轩,陈会敏
长沙理工大学数学与统计学院,湖南 长沙

收稿日期:2021年3月22日;录用日期:2021年4月11日;发布日期:2021年4月27日

摘要
本文研究了按比率p移除易感植株为控制措施的一类Lotka-Volterra Filippov型植物传染病模型。讨论了无病平衡点和地方病平衡点的存在性和稳定性以及伪焦点的存在性。通过构造合适的非光滑的Lyapunov函数利用广义Lyapunov方法研究该模型在不同经济阈值下的全局动力学,得到三个结果。
关键词
植物传染病模型,伪焦点,广义Lyapunov方法,全局动力学
Global Dynamics for a Plant Disease Model Based on Generalized Lyapunov Approach
Xuan Leng, Huimin Chen
School of Mathematics and Statistics, Changsha University of Science and Technology, Changsha Hunan

Received: Mar. 22nd, 2021; accepted: Apr. 11th, 2021; published: Apr. 27th, 2021

ABSTRACT
In this paper, a Lotka-Volterra Filippov plant infectious disease model was studied with the removal of susceptible plants at a ratio of p as control measure. The existence and stability of disease-free equilibrium and endemic equilibrium and the existence of false focus were discussed. By constructing appropriate non-smooth Lyapunov functions and using the generalized Lyapunov method, the global dynamics of the model under different economic thresholds were studied, and three results were obtained.
Keywords:Plant Disease Model, Pseudo-Focus, Generalized Lyapunov Approach, Global Dynamics

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
由植物病原体所引起的植物传染病会造成巨大的作物损失,如何有效地控制植物传染病引起了科学家和各国政府的高度重视。为了有效地控制植物传染病,减少对环境的危害,了解植物传染病的传播动力学是至关重要的。大量的理论和实证研究表明:建立微分方程描述的数学模型是研究传染病传播动力学的一个非常有效的方法,通过对所建模型的分析研究能帮助我们理解影响疾病传播的潜在机理,为控制策略的指定提供重要建议和依据。例如Jeger等人 [1] 研究一种分析植物病毒传播特性。Fishman等人 [2] 研究了柑橘病毒的传播与控制。
由于化学残留物对环境有直接的负面影响,所以不提倡使用化学方法来控制植物传染病。近年来采用多种控制措施相结合的疾病控制策略开始进入人们视线。直到1972年,疾病综合治理(IDM)的概念 [3] 被提出,IDM是结合生物防治和栽培措施防治等控制策略来预防和消除传染病传播。其中,再植易感植株和移除染病植株是一种有效的栽培控制措施。例如Chen等人 [4] 研究了具有再植易感植株和移除染病植株控制措施传染病模型,该模型的定性分析表明了疾病持续存在的稳定动力学和阈值条件。Bosch [5] 研究了以再植和移除为控制策略的果园传染病的动力学研究。
Zhao等人 [6] 提出了一种Lotka-Volterra Filippov型植物传染病模型并且考虑一类具有比率种植率的植物传染病,模型如下:
其中 表示植株的常数种植比率, 是一个与经济阈值ET有关的控制函数,具体表达式为:
模型具有五种类型的平衡,其中一种类型的平衡,用植物初始数的迭代方程来讨论全局结构。对于其他四种类型的平衡,通过构造适当的Lyapunov函数得到每种类型的有界全局焦点。Wang等人 [7] 对Zhao的模型经行改进,考虑一类具有常数种植的植物传染病模型,即当 。由于首次积分不存在,分析具有常数种植的植物传染病的动力学行为更加困难。Wang等人在分析具有常数种植的植物传染病模型中发现该模型具有滑模异宿轨的现象,获得更加丰富的动力学行为。
基于传染病没爆发时追求经济效益最大化以及当传染病爆发时经济损失最小化的原则,本文在Wang和Zhao研究的Lotka-Volterra Filippov型植物传染病模型上,考虑一类以移除易感植株为控制策略的植物传染病模型,为了追求经济效益最大化,我们在传染病还没有发现时,可以采取按常数 与按比率 种植易感植株的方式获得最大经济效益,考虑到环境容纳量的原因,我们假设种植比率 小于易感植株的自然死亡率 。传染病在经济阈值为 爆发时,为了追求经济损失最小化,将不再按比率 种植易感植株达到控制传染病传播和及时止损的目的。用右端不连续微分方程描述一个具有经济阈值的Lotka-Volterra Filippov型植物传染病模型,具体模型如下:
(1.1)
其中 表示易感植株的常数种植数量; 表示传染病的感染率; 表示易感植株的自然死亡率; 表示感染植株的死亡率,包括自然死亡率和因病死亡率。 表示易感植株的种植比率,这里我们假设 。 是一个控制函数,函数值与易感植株的数量有关,具体表达为:
定义
和
其中 。模型(1.1)在 上的向量场方程 为:
模型(1.1)在 上的向量场方程 为:
2. 预备知识
在本小节中,将介绍本文中要用到的一些基本的理论知识,其中关于Filippov系统的定性理论参考文献 [8] [9]。方便起见,我们给出如下引理:
引理2.1 [10] (广义Lyapunov方法)如果 是正则的, 在 上的任意紧子区间上绝对连续。就有 和 在 上是几乎处处可微的并且有:
下面我们给出一个关于非光滑Lyapunov函数的LaSalle不变原理的简短描述,具体细节可以参考文献 [11]。函数 关于微分包含 的广义导数被定义为:
引理2.2 [12] (LaSalle不变原理)如果 是一个局部Lipschitz并且是系统的Lyapunov函数。假设存在 , 是由 组成的集合,使得 是有界集。令
是 的最大弱不变集, 是系统满足初值条件 的解。有当 时 。特别地,当 并且 时, 是全局渐近稳定的。
3. 子系统动力学分析
3.1. 解的正性与有界性
在本小节中,我们主要研究模型(1.1)在区域 上的动力学行为。在开始讨论本节之前,首先给出两个引理保证模型(1.1)解的正性和有界性,说明模型(1.1)的建立符合生物学意义。
引理3.1 [7] 假设 为模型(1.1)满足初始条件 和 的解,定义区间为 ,其中 。则对于所有的 有 且 。
由模型(1.1)的第一个方程,得到 所以当 有 。接下来用反证法证明 。假设存在 使得 ,那么存在 使得 并且对于所有的 ,有 。由模型(1.1)的第二个方程可以得到对于所有的 有
因此当 时有 。特别地,有 这和 相矛盾。证毕。
引理3.2 [7] 假设 为模型(1.1)满足初始条件 和 的解,则解 的存在区间能延拓到 。此外,解 在区间 上有界。
设 为模型(1.1)满足初始条件 和 的解,且解的最大存在区间为 ,其中 。令 。有
其中 。因此
(2.1)
同时对不等式(2.1)两边进行0到T积分
其中 ,当 ,有
(2.2)
根据不等式(2.2)得到 ,这说明解 在 上有界。利用延拓定理可得解 在 上有界。
3.2. 子区域上的动力学行为
这部分我们讨论 在区域 上的全局动力行为,其中 。首先,通过计算得到子系统 的无病平衡点 为
应用下一代矩阵方法,计算子系统 的基本再生数 。
对于子系统 而言,当 时,不存在地方病平衡点。当 时,存在唯一的地方病平衡点 。通过计算,子系统的无病平衡点 为:
我们得到如下结果。
定理3.3 对于子系统 而言,当 时,无病平衡点 是全局渐近稳定的;当 时,地方病平衡点 是全局渐近稳定的,其中 。
证明 当 时,考虑Lyapunov函数
函数 沿着子系统 求导
(3.1)
其中
当 时, 。 当且仅当 。根据LaSalle不变原理,此时子系统 的无病平衡点 是全局渐近稳定的。
当 时,可以将系统(1.1)的平衡点 表示成
我们将子系统 用如下形式表示:
考虑Lyapunov函数
函数 沿着子系统 求导
当且仅当 。根据LaSalle不变原理,此时子系统 的地方病平衡点 是全局渐近稳定的。
3.3. 不连续边界上的动力学行为
这一部分主要我们分析模型(1.1)在不连续边界 上的动力学行为,其中不连续边界 可以表示为 。包括滑模区域、在滑模区域上所定义的滑模方程以及是否存在伪平衡点。
根据滑模区域的定义,当 并且 时 上存在滑模区域。解不等式 并且 ,得 是一个单点集。 是系统的一个伪焦点。
我们利用微分包含定义不连续边界 上的向量场方程,向量场方程如下:
因为 ,得 。伪焦点 存在的条件为 ,解得 ,即 当时,伪焦点 存在。
4. 全局动力学分析
下面根据 的大小关系,分三种情况分析系统(1.1)平衡点 的实虚情况以及伪焦点 的存在性。
1) 当 时,此时平衡点 是实平衡点,平衡点 是虚平衡点,用 表示,伪焦点 不存在。
2) 当 时,此时平衡点 都是虚平衡点,用 表示,伪焦点 存在。
3) 当 时,此时 是一个虚平衡点,平衡点 是实平衡点,用 表示,伪焦点 不存在。
定理4.1 当 时,系统(1.1)存在唯一的实平衡点 并且 是全局渐近稳定的。
证明 设 是系统(1.1)满足初值条件 的解,存在可测函数 使得对几乎处处的 有
(3.1)
其中
将系统(3.1)配凑成如下形式:
(3.2)
其中 。
构建如下的Lyapunov函数:
其中
(3.3)
和
(3.4)
对于 区域,根据已知条件 得到此时 ,所以有 ,因此 。构建的Lyapunov函数 是正则的,所以
其中
让 ,有 。函数 沿着系统(3.2)求导有
(3.5)
并且,最大弱不变集 ,根据引理2.2,系统(1.1)的实平衡点 是全局渐近稳定的。证毕。
定理4.2 当 时,系统(1.1)的伪焦点 存在并且是全局渐近稳定的。
证明 设 是系统(1.1)满足初值条件 的解,将系统(3.1)配凑成如下形式:
(3.6)
考虑如下的Lyapunov函数
其中
(3.7)
在已知条件 下,当 时有 ,所以有 ,因此 。当 时有 ,所以有 ,因此 。构造的Lyapunov函数 是正则的。计算
让 有 。函数 沿着系统(3.6)求导
(3.8)
并且,最大弱不变集 ,根据引理2.2,系统(1.1)的伪焦点 是全局渐近稳定的。证毕。
定理4.3 当 时,系统(1.1)存在唯一的实平衡点 并且 是全局渐近稳定的。
证明 设 是系统(1.1)满足初值条件 的解,将系统(3.1)配凑成如下形式:
(3.9)
构建如下的Lyapunov函数:
在已知条件 下,当 时有 ,所以有 ,因此 ,构造的Lyapunov函数 是正则的。所以
让 ,有 。函数 沿着系统(3.9)求导
(3.10)
并且,最大弱不变集 ,根据引理2.2,系统(1.1)的实平衡点 是全局渐近稳定的。证毕。
5. 数值模拟
本小节中,通过数值模拟检验所得结论的正确性。
令 此时 。当经济阈值 满足定理4.1的条件,根据定理4.1实平衡点 是全局渐近稳定的(数值模拟图见图1(a))。当经济阈值 满足定理4.2的条件,根据定理4.2伪焦点 是全局渐近稳定的(数值模拟图见图1(b))。当经济阈值 满足定理4.3的条件,根据定理4.3实平衡点 是全局渐近稳定的(数值模拟图见图1(c))。
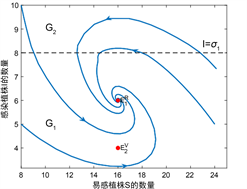
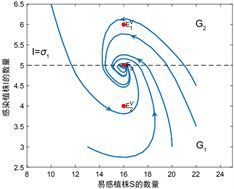
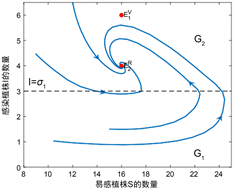
图1. 系统解的数值模拟图
6. 结论
为追求经济效益最大化和经济损失最小化的目的,本文研究了按比率 移除易感植株为控制措施的一类Lotka-Volterra Filippov型植物传染病模型。讨论了无病平衡点和地方病平衡点的存在性和稳定性以及焦点的存在性。通过构造合适的非光滑的Lyapunov函数利用广义Lyapunov方法研究该模型的全局动力学,得到三个结论。当 时,系统存在唯一的全局渐近稳定的实平衡点 ,形成地方病。当 时,系统的伪焦点 存在并且是全局渐近稳的,形成地方病。当 时,系统存在唯一的全局渐近稳定的实平衡点 ,形成地方病。
本文的理论和数值结果表明,传染病最终不会消失,而是变成地方性疾病,这样的结果是合适现实的。按比率 移除易感植株最终会减少染病植株的数量,我们可以采取这一措施使染病植株的数量达到人们可接受的范围内,最大程度减少经济损失。解的最终趋势依赖与经济阈值 ,这说明合理的经济阈值对控制传染病的传播有重要的意义。
文章引用
冷 轩,陈会敏. 基于广义Lyapunov方法的植物传染病模型的全局动力学
Global Dynamics for a Plant Disease Model Based on Generalized Lyapunov Approach[J]. 应用数学进展, 2021, 10(04): 1086-1095. https://doi.org/10.12677/AAM.2021.104117
参考文献
- 1. Jeger, M.J., Van Den Bosch, F. and Madden, L.V. (1998) A Model for Analysing Plant-Virus Transmission Characteristics and Epidemic Development. Mathematical Medicine and Biology: A Journal of the IMA, 15, 1-18. https://doi.org/10.1093/imammb/15.1.1
- 2. Fishman, S., Marcus, R. and Talpaz, H. (1983) Epidemiological and Economic Models for Spread and Control of Citrus Tristeza Virus Disease. Phytoparasitica, 11, 39-49. https://doi.org/10.1007/BF02980710
- 3. Jones, R.A.C. (2000) Determining ‘Threshold’ Levels for Seed-Borne Virus Infection in Seed Stocks. Virus Research, 71, 171-183. https://doi.org/10.1016/S0168-1702(00)00197-0
- 4. Chan, M.S. and Jeger, M.J. (1994) An Analytical Model of Plant Virus Disease Dynamics with Roguing and Replanting. Journal of Applied Ecology, 31, 413-427. https://doi.org/10.2307/2404439
- 5. van den Bosch, F. and de Roos, A.M. (1996) The Dynamics of Infectious Diseases in Orchards with Roguing and Replanting as Control Strategy. Journal of Mathematical Biology, 35, 129-157. https://doi.org/10.1007/s002850050047
- 6. Zhao, T. and Xiao, Y. (2013) Non-Smooth Plant Disease Models with Economic Thresholds. Mathematical Biosciences, 241, 34-48. https://doi.org/10.1016/j.mbs.2012.09.005
- 7. Wang, J., Zhang, F. and Wang, L. (2016) Equilibrium, Pseudoequilibrium and Sliding-Mode Heteroclinic Orbit in a Filippov-Type Plant Disease Model. Nonlinear Analysis: Real World Applications, 31, 308-324. https://doi.org/10.1016/j.nonrwa.2016.01.017
- 8. Filippov, A.F. (2013) Differential Equations with Discontinuous Right Hand Sides: Control Systems. Springer Science & Business Media, Berlin.
- 9. 黄立宏, 郭振远, 王佳伏. 右端不连续微分方程理论与应用[M]. 北京: 科学出版社, 2011.
- 10. Bacciotti, A. and Ceragioli, F. (1999) Stability and Stabilization of Discontinuous Systems and Nonsmooth Lyapunov Functions. ESAIM: Control, Optimisation and Calculus of Variations, 4, 361-376. https://doi.org/10.1051/cocv:1999113
- 11. Clarke, F.H. (1990) Optimization and Nonsmooth Analysis. Society for Industrial and Applied Mathematics, New York.
- 12. Forti, M., Grazzini, M. and Nistri, P. (2006) Generalized Lyapunov Approach for Convergence of Neural Networks with Discontinuous or Non-Lipschitz Activations. Physica D: Nonlinear Phenomena, 214, 88-99. https://doi.org/10.1016/j.physd.2005.12.006