Journal of Aerospace Science and Technology
Vol.
10
No.
04
(
2022
), Article ID:
58959
,
9
pages
10.12677/JAST.2022.104011
倾转旋翼无人机关键技术研究综述
刘静怡1,闫涛2*,李文辉2
1太原理工大学机械与运载工程学院,山西 太原
2太原理工大学航空航天学院,山西 晋中
收稿日期:2022年9月6日;录用日期:2022年12月6日;发布日期:2022年12月12日

摘要
倾转旋翼无人机综合旋翼与固定翼的优点,具有垂直起降、空中悬停、高速巡航的能力,是国内外无人机研究的热点领域之一。本文主要从结构设计、空气动力学、飞行控制三方面总结了倾转旋翼无人机的关键技术。结构设计方面,总结了不同构型、部件结构、设计方案的优缺点;气动分析方面,总结了现有的动力学建模方法,以及计算机仿真和风洞试验两种方式对复杂气动现象的研究;飞行控制方面,针对倾转旋翼无人机三种模式下的控制难题,从控制算法、轨迹规划、容错设计三方面进行概述。最后,为倾转旋翼无人机的未来发展提出预测和建议。
关键词
倾转旋翼,结构设计,空气动力学,飞行控制

Overview of Key Technologies for Tilt-Rotor UAV
Jingyi Liu1, Tao Yan2*, Wenhui Li2
1College of Mechanical and Vehicle Engineering, Taiyuan University of Technology, Taiyuan Shanxi
2College of Aeronautics and Astronautics, Taiyuan University of Technology, Jinzhong Shanxi
Received: Sep. 6th, 2022; accepted: Dec. 6th, 2022; published: Dec. 12th, 2022

ABSTRACT
Tilt-rotor UAV combines the advantages of rotor and fixed wing and has the ability of vertical take-off and landing, hover in the air, and high-speed cruise. It is one of the hot fields of UAV research at home and abroad. This paper mainly analyzes and summarizes the key technologies of tilt-rotor UAV from three aspects: structural overall design, aerodynamics and flight control. In overall structural design, the advantages and disadvantages of different configurations, component structures and design schemes are summarized. In aerodynamic analysis, the existing dynamic modeling method and the research on complex aerodynamic phenomena by computer simulation and wind tunnel tests are summarized. In the aspect of flight control, control algorithms, trajectory planning and fault-tolerant design are summarized from three aspects for the control problems of tilt-rotor UAV in three modes. Finally, the prediction and suggestions for the future development of tilt-rotor UAV are put forward.
Keywords:Tilt Rotor, Structural Design, Aerodynamics, Flight Control

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 背景
无人机无需驾驶员,拥有自主飞行能力,一般可重复回收利用,具有成本低、性能高、安全性强、环境适应性强的优点,通常被用于执行危险性高、环境恶劣的任务。
倾转旋翼无人机由固定翼和旋翼组合而成,旋翼通常可进行0˚~90˚倾转。同固定翼飞行器相比,倾转旋翼飞行器无需在特定的机场跑道上滑跑就能进行垂直起降,这使得倾转旋翼机在应用时不需要着重考虑起飞环境的影响,无论是地形条件较恶劣的山地还是人口稠密的城区都可以使用;同旋翼飞行器相比,倾转旋翼飞行器航速更快,巡航能力更强,续航时间更长,这使得倾转旋翼机具有更高的作业效率。倾转旋翼机优秀的作业能力,受到各国的青睐,被广泛应用于监控巡查、物资投放、救灾抢险、物流运输、电力巡检、农药喷洒等领域。
20世纪40年代末期,美国贝尔直升机公司就开始了对倾转旋翼机技术进行研究,其研制的V-22倾转旋翼机在美国服役期间,因拥有独特构型而受到各国的关注,之后很多国家都开展了倾转旋翼机的研究。美国贝尔公司在V-22基础上,研制了TR918鹰眼无人机,最高升限为4450米,续航时间长达6小时,具有低成本高效益的优点,被用于侦察监视等任务。以色列航宇工业公司研发的“黑豹”倾转旋翼机质量为65千克,可持续飞行8小时,其独特的倾斜旋转翼推进系统,使该无人机能够携载其本身质量1/3的有效载荷。日本航空航天研究开发机构研发的QUX-02飞行器由串列翼和四旋翼组成,采用的倾转机翼式结构可克服旋翼下洗气流影响下的机翼产生的发动机功率损耗与不稳定。
近年来,国内的倾转旋翼无人飞行器同样发展迅速。西北工业大学团队研制的NPU-Q01E小型倾转旋翼机翼展为1.9米,空机重量为4.5千克,最高升限为3000米,巡航速度为150千米每小时,可应用于需要定点悬停的警用安防。深圳智航无人机公司研制的V380无人飞行器将前侧两旋翼通过一根轴连接在机身上,后侧两旋翼分别通过短轴安装在机翼上,且都距离机翼一定距离,避免了旋翼与机翼之间的气动干扰。京东研制的VT1倾转旋翼机采用了共轴反转双旋翼新构型,具有航程远、航速高、占地面积小的优点。
倾转旋翼无人机具有比较高的复杂度,尤其是在旋翼倾转过程中,对结构、气动、控制的技术要求极高。本文对倾转旋翼无人机所涉及的结构设计、气动分析、飞行控制等3项关键技术进行综述,总结倾转旋翼无人机的研究热点、研究难点,预测了发展趋势,为后续倾转旋翼无人机的研究提供参考。
2. 结构设计技术
飞行器结构设计是一项综合多学科知识,具有创造性、科学性,要求不断迭代的过程,对飞行性能有着全局性的影响。
倾转旋翼无人机结构复杂,总体布局多种多样,目前各国研发人员在使用不同的旋翼数量、倾转方式、机翼与旋翼的相对位置基础上均研制出了较为成熟的倾转旋翼无人机布局:位于机身两侧的双旋翼 [1]、两个前侧可倾转旋翼和一个后旋翼的倾转三旋翼 [2]、所有旋翼均可倾转的“H”型和“X”型倾转四旋翼 [3] [4] 等。在现有布局的基础上,研究者们不断的对倾转旋翼无人机构型进行了创新(图1)。刘晓琳等 [5] 设计了一款“十”字型倾转四旋翼无人机,采用具有伸缩性能的主翼膜及其主传动机构,当飞行器在垂直起降和高空巡航过程时,使主翼膜分别处于收缩和伸展状态,以减小气流扰动和提供部分升力。Ozdemir等 [6] 设计的TURAC倾转旋翼无人机具有两个倾转旋翼和一个位于机身中间处的固定主旋翼,采用可拆卸机翼设计,可更换不同尺寸机翼。张练等 [7] 为了提高倾转旋翼机展弦比,将机翼设计成内外两段,外翼段随旋翼一起倾转。曹粟等 [8] 提出了一种新型具有自适应折叠机翼的倾转四旋翼无人机,可以根据无人机当前的飞行迎角实时的调整机翼的倾转角度。Lv等 [9] 与陆陶冶 [10] 等均对新型共轴倾转旋翼无人机进行研究,不同的是前者研发的CTRUAV由两对前侧可倾转的共轴旋翼和一个后侧固定轴旋翼组成,后者研发的原型机仅有一对共轴旋翼,且具有可折叠机翼。

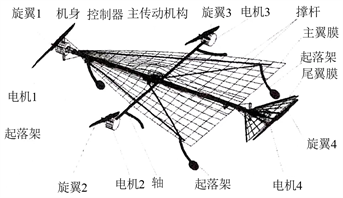

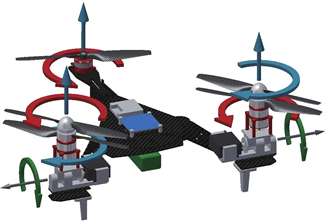
Figure 1. Tilt-rotor UAV models with different configurations [5] [6] [7] [9]
图1. 不同构型倾转旋翼无人机模型 [5] [6] [7] [9]
对于构型的创新促进了倾转旋翼无人机的发展,建立在不同构型的基础上,研究者对其中的各个部件进行了详细的结构设计与改良,以增强无人机的飞行性能。Chiappinelli等 [11] 将四旋翼框架通过一个非驱动铰链机构链接到固定翼无人机上,飞机后部装有一个双向旋翼,这种被动耦合倾转旋翼结构减小了旋翼与机翼间的气动干扰,提高了抗侧风性能。Senkul等 [12] (图2)在四轴飞行器的基础上研究了一种电机带动转子同方向倾转的四轴倾转旋翼无人机,并将MCI的汽车翼镜倾斜机构成功转移到四旋翼系统 [13];Wu等 [14] 设计的倾转四旋翼无人机采用高展弦比机翼设计,水平尾翼和垂直尾翼均布置在机翼后部,将倾转机构固定在穿过机翼的连杆两端;Elfeky等 [15] 提出了一种新型四旋翼设计方案,各旋翼可围绕固定框架在两个方向上倾转以解耦所有运动,这种改进提高了四旋翼的稳定性和机动性;薛立鹏等 [16] (图3)首次在国内提出变直径倾转旋翼的概念并对桨叶外形及内部伸缩机构进行设计,在直升机模式时旋翼直径最大,在固定翼模式时旋翼直径缩小,从而使两种状态的性能要求都得到满足。
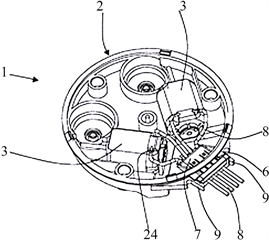
Figure 2. Car mirror tilting mechanism [12]
图2. 汽车后视镜倾转机构 [12]
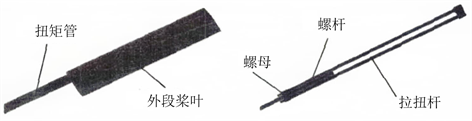
Figure 3. Changeable diameter blade shape and internal telescopic mechanism [16]
图3. 变直径桨叶外形及内部伸缩机构 [16]
除了总体构型与部件结构的创新设计,对倾转旋翼无人机设计的研究还集中在设计方案的优化上。Chen等 [17] 提出了一种能产生沿正交轴水平方向推力的倾转八旋翼无人机,并开发了一种基于参数扫描方法的倾转旋翼无人机优化设计过程,可为倾转旋翼无人机选择最佳参数,并由设定的悬停时间确定有效载荷。Yeo等 [18] 针对倾转旋翼机不同设计参数对飞机性能的影响进行了研究,研究表明在计算中考虑旋翼与机翼的气动干扰时,改变旋翼旋转方向才会显著降低飞机的升阻比,为后续倾转旋翼机的参数设计提供参考。Kahvecioglu等 [19] 使用MS Excel和Ansys Workbench的设计探索工具箱针对确定需求对小型倾转四旋翼无人机进行优化设计,在迭代计算循环之后,确定合适的起飞重量、失速速度、翼展等设计参数。Hassanalian等 [20] 提出了一种高效的倾转旋翼微型无人机的设计与优化方案,该设计包括任务分析、确定最佳展弦比、确定最佳机翼载荷以及重量估算等步骤。窦炳耀等 [21] 提出了一种面向方案的设计方法改善倾转旋翼飞机短距起飞性能,研究倾转旋翼飞机在短距起飞模式下,飞机地面滑跑距离与短舱动力倾转角、推重比等设计参数之间简洁有效的理论公式,所得结论可为同类飞机设计提供参考。这些优化过的设计方案为总体设计提供不同思路步骤,能较为精准的确定合适的参数范围。
3. 气动分析技术
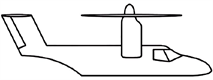
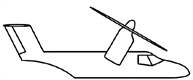
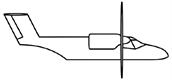
倾转旋翼无人机通常有三种飞行模式:直升机模式、过渡模式、固定翼模式(图4)。直升机模式时无人机可执行垂直起降、空中悬停等任务;过渡模式时旋翼倾转,无人机实现由直升机模式到固定翼模式的过度;固定翼模式时,飞行器主要通过机翼提供升力,旋翼旋转平面一般与地面垂直,提供飞行所需的推力或拉力。通过研究人们发现在三种飞行模式下旋翼与机翼间均存在严重的气动干扰问题,极大影响其飞行性能。因此,建立准确的气动力学模型,利用计算机技术进行仿真模拟,在风洞试验中对不同模式下飞行状态进行测试,对倾转旋翼无人机的研究尤为重要。
 (a)
(a)
 (b)
(b)
 (c)
(c)
Figure 4. Three flight modes of tilt-rotor UAV [22]. (a) Helicopter mode; (b) Conversion mode; (c) Fixed wing mode
图4. 倾转旋翼无人机三种飞行模式 [22]。(a) 直升机模式,(b) 倾转模式,(c) 固定翼模式
由于倾转旋翼无人机的仿真模拟更注重复杂的气动计算,通常运用较为简化的六自由度刚体方程描述飞机动力学模型。Yuksek等 [23] 对针对从悬停到水平飞行的过渡状态,建立了TURAC倾转旋翼机完整六自由度非线性数学模型,该模型包括旋翼诱导气流的气动效应,是巡航速度、倾角和攻角的函数,能较为准确计算旋翼与机翼的气动干扰;Kendoul等 [1] 提出了一种双旋翼六自由度动力学模型,并合成了一个非线性控制器,从而获得较为满意的控制效果;倾转旋翼无人机在过渡状态具有较大的惯性耦合效应,为此Li等 [24] (图5)将机身、短舱和旋翼视为独立实体,以多体运动方程的形式建立了一个真实的模型,该模型增加了自由度和方程的数量,提高了模型计算准确度。
在模型建立的基础上,很多研究人员结合不同软件针对倾转旋翼的复杂流场进行了仿真模拟研究。Zhang等 [25] 利用FLUENT软件进行仿真,研究了固定翼模式下倾转旋翼的倾转角度、旋翼尺寸、共轴双旋翼结构安装距离等因素对旋翼与固定翼之间复杂流场的影响;Ying等 [26] [27] (图6)提出了一种将旋翼作动器圆盘模型与嵌入式网格技术相结合的方法,能有效预测倾斜旋翼飞机在过渡模式、固定翼模式下的流场和气动特性;Kang等 [28] 对倾转旋翼飞机机舱固定辅助翼(NFAW)部件的数学模型和气动导数进行研究,基于FLUENT和DATCOM的计算流体动力学分析,验证了NFAW模型与原始倾转旋翼无人机相比的气动性能优势;伍咏成等 [29] 针对倾转四旋翼无人机同时存在旋翼和机翼两种升力机构并且旋翼短舱可倾转的特点,采用计算流体力学的方法对无人机进行了气动分析,对旋翼流场的模拟采用了动量源法,在保证了计算精度的同时提高了计算效率。
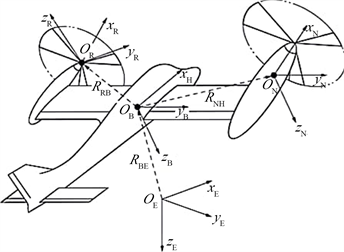
Figure 5. Pneumatic model reference coordinates [24]
图5. 气动模型参考坐标 [24]
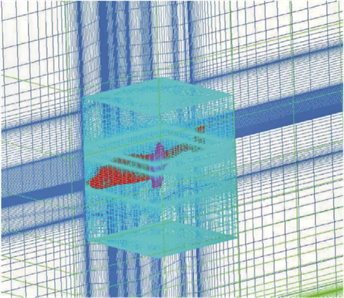
Figure 6. Grid system of pneumatic simulation [27]
图6. 气动仿真网格系统 [27]
目前,对于倾转旋翼机的试验研究较少,但仍有研究者们尝试在风洞试验中记录可供计算对比的高可信度试验数据。Gibertini等 [30] 在大型风洞中对倾转旋翼机ERICA1:8比例模型进行试验,测量几种不同配置和不同姿态下的空气动力和力矩,结果表明整流罩设计合理且阻力较小,但起落架结构仍需进一步优化;陈坤等 [31] (图7)针对倾转三旋翼飞行器的地面效应问题,采用0.5缩比模型在低速回流式开口风洞中对机体离地不同高度时所受载荷大小、机体下方动态流场进行测量,试验结果对倾转三旋翼飞行器动力系统的选择,控制増稳系统设计以及借助地面效应优势提高承载能力提供参考;李尚斌等 [32] 在8 m × 6 m开口低速直流式风洞中对倾转旋翼无人机悬停和巡航状态下的旋翼拉力和扭矩进行测量,验证了设计的倾转旋翼在直升机模式和固定翼模式下的气动性能。

Figure 7. Hovering test table in low-speed wind tunnel [31]
图7. 低速风洞悬停试验台 [31]
4. 飞行控制技术
倾转旋翼无人机在飞行性能显著提高的同时,在控制技术上遇到许多难题。尤其是过渡模式下,此时无人机的升力由旋翼和机翼共同提供,既需要旋翼进行拉力矢量控制,又有空气舵控制,在倾转过程中,不同控制机构在控制系统中所占权重也时刻变化,再加上复杂的流场状态,对于控制的要求极高 [22]。本节主要从控制算法、轨迹跟踪、容错设计三方面对倾转旋翼无人机的研究现状作以总结。
研究者们在传统控制得到的经验数据基础上,针对倾转旋翼无人机特殊构型,引入不同控制算法对控制系统进行研究。郑光廷等 [33] 将遗传算法和比例积分微分(PID)控制理论相结合,对倾转旋翼无人机过渡模式进行高度控制,基于遗传算法整定获得全局最优的PID控制参数以保证良好的定高控制效果。宋晓东等 [34] 基于增益调度法设计了一种倾转旋翼机全局控制器,主要在转换模式下通过增益调度的方法实现控制面的逐渐切换,该方法采用离线计算,在线查表的方式,具有计算量小,易于工程实现的优势。Chowdhury等 [35] 针对倾斜转子的欠驱动特性,设计了一种基于反演法的比例微分(PD)控制器,使倾转旋翼无人机能够在一个特定位置悬停。
在实际应用过程中,无人机飞行器运动轨迹的起伏形式较为明显,因此对于核心控制主机来说,其在俯仰角、滚转角、偏航角层面所获得的轨迹跟踪结果始终难以与飞行器设备的实际运动轨迹保持一致 [36]。为保证倾转旋翼无人机飞行稳定性和安全性,国内外已有许多学者对其运动轨迹跟踪控制做出了研究。Invernizzi等 [37] 提出了一种基于几何控制理论的推力矢量无人机轨迹跟踪控制设计方案,定义了驱动机构的推力矢量限制,当推力矢量能力有限时,优先考虑位置而不是姿态跟踪,使无人机可以无间断工作,并在倾转四旋翼无人机上得到验证。Rego等 [38] 和Santos等 [39] 均对悬停状态下飞行器载荷摆动时的路径跟踪问题进行研究,前者建立了新的载荷运动学模型,提出了一种区域视状态估计器,后者将倾转旋翼在悬置载荷下的运动方程绕参考轨迹线性化,提出了一种约束模型预测控制器。Flores等 [40] 提出了一种非线性控制策略,可控制飞行器在纵向平面上的垂直和水平飞行并且为了实现自主姿态稳定飞行,设计构建了一种低成本的基于数字信号处理(DSP)的嵌入式飞行控制系统。Oosedo等 [41] 针对0˚到90˚俯仰角的倾转旋翼无人机姿态变化设计了控制系统,提出并验证了两种飞行系统相对于无人机姿态的切换方法。
无人机通常需要设计容错飞行控制系统,以应对飞行过程中制动器及传感器的各种故障。王栋等 [42] 将尾部舵机堵塞故障加入到力矩解算方程中,基于自适应反步法和非奇异终端滑模控制,提出了一种不需要故障诊断的鲁棒容错控制设计。Park等 [43] 针对控制器和传感器故障进行容错控制,提出了一种基于模型误差综合控制的容错控制方案,设计了基于FDI算法的容错联邦卡尔曼滤波器,不需要系统识别过程,并且在没有故障检测和隔离过程的情况下提供了有效的可重构性,能有效缩短传感器发生故障时的响应时间。Liu等 [44] 考虑到该线性变参数(LPV)控制对象的不可测变化参数和潜在的传感器故障,提出了一种具有容错能力的基于观测器的LPV控制,在理论上可以确保倾转旋翼无人机过渡模式中的稳定性。
5. 总结与展望
倾转旋翼无人机飞行性能好,能适应不同的任务环境,在军用和民用领域均具有广泛的应用前景。本文综合现阶段倾转旋翼无人机结构设计、空气动力学、飞行控制等关键技术,对未来倾转旋翼无人机的发展趋势进行以下几点预测:
1) 倾转旋翼无人机的结构设计依旧是研究热点。对不同的设计方案进行研究,可以更准确、快速地进行参数设计。构型设计方面,借鉴固定翼与旋翼先进结构,结合仿生技术对现有构型进行优化创新,旨在提出更为合理的构型,进一步减小旋翼与机翼间的气动耦合,提升倾转旋翼无人机的飞行性能。
2) 倾转旋翼无人机结构复杂,属于多运动体的复杂系统,尤其是在过渡模式下,无法对其进行准确的动力学建模。未来希望建立更精准的气动模型,通过更为先进的计算机仿真与风洞试验等方式,在研究中加强对原型机的试制与飞行试验,对比分析试验数据与仿真数据,准确模拟倾转旋翼三种不同模式下的气动特性。
3) 过渡模式下无法准确建立动力学模型的问题,加大了对无人机控制率律设计的难度。同时,旋翼与固定翼控制的耦合增加了算法复杂度,未来将对倾转旋翼无人机控制的可靠性、稳定性、准确性提出新要求,通过算法的改良,在姿态控制、轨迹跟踪、容错设计方面进行更为深入地研究,以提升倾转旋翼无人机的系统稳定性。
相信随着结构设计、气动分析、飞行控制等领域关键技术的不断突破,倾转旋翼无人机会在不断拓展的应用领域里发挥越来越重要的作用,针对倾转旋翼无人机的研究也将更成熟,使其飞行性能朝着更为先进、需求导向更加突出的方向发展。
文章引用
刘静怡,闫 涛,李文辉. 倾转旋翼无人机关键技术研究综述
Overview of Key Technologies for Tilt-Rotor UAV[J]. 国际航空航天科学, 2022, 10(04): 99-107. https://doi.org/10.12677/JAST.2022.104011
参考文献
- 1. Kendoul, F., Fantoni, I. and Lozano, R. (2005) Modeling and Control of a Small Autonomous Aircraft Having Two Tilting Rotors. In: 2005 44th IEEE Conference on Decision and Control & European Control Conference, IEEE, New York, 8144-8149. https://doi.org/10.1109/CDC.2005.1583480
- 2. D’Amato, E., Di Francesco, G., Notaro, I., et al. (2015) Nonlinear Dynamic Inversion and Neural Networks for a Tilt Tri-Rotor UAV. IFAC-PapersOnLine, 48, 162-167. https://doi.org/10.1016/j.ifacol.2015.08.077
- 3. Ding, C. and Lu, L. (2021) A Tilting-Rotor Unmanned Aerial Vehicle for Enhanced Aerial Locomotion and Manipulation Capabilities: Design, Control, and Applications. IEEE-ASME Transactions on Mechatronics, 26, 2237-2248. https://doi.org/10.1109/TMECH.2020.3036346
- 4. Ryll, M., Bulthoff, H.H. and Giordano, P.R. (2015) A Novel Overactuated Quadrotor Unmanned Aerial Vehicle: Modeling, Control, and Experimental Validation. IEEE Transactions on Control Systems Technology, 23, 540-556. https://doi.org/10.1109/TCST.2014.2330999
- 5. 刘晓琳, 韩婷. 新型可倾转旋翼的四旋翼飞行器结构设计[J]. 计算机仿真, 2016, 33(3): 61-64.
- 6. Ozdemir, U., Aktas, Y.O., Vuruskan, A., et al. (2014) Design of a Commercial Hybrid VTOL UAV System. Journal of Intelligent & Robotic Systems, 74, 371-393. https://doi.org/10.1007/s10846-013-9900-0
- 7. 张练, 孙凯军, 叶川, 等. 新构型倾转旋翼无人机飞行力学建模[J]. 航空工程进展, 2019, 10(4): 462-470.
- 8. 曹粟, 喻煌超, 吴立珍, 等. 可变形倾转四旋翼无人机设计与飞行验证[J]. 无人系统技术, 2022, 5(4): 109-118.
- 9. Lv, Z.-Y., Wu, Y., Zhao, Q., et al. (2022) Design and Control of a Novel Coaxial Tilt-Rotor UAV. IEEE Transactions on Industrial Electronics, 69, 3810-3821. https://doi.org/10.1109/TIE.2021.3075886
- 10. 陆陶冶, 陈仁良, 曾丽芳, 等. 共轴倾转旋翼性能计算方法[J]. 南京航空航天大学学报, 2017, 49(3): 396-402.
- 11. Chiappinelli, R., Cohen, M., Doff-Sotta, M., et al. (2019) Modeling and Control of a Passively-Coupled Tilt-Rotor Vertical Takeoff and Landing Aircraft. In: Howard, A., Althoefer, K., Arai, F., et al., Eds., 2019 International Conference on Robotics and Automation (ICRA), IEEE, New York, 4141-4147. https://doi.org/10.1109/ICRA.2019.8793606
- 12. Senkul, A.F. and Altug, E. (2016) System Design of a Novel Tilt-Roll Rotor Quadrotor UAV. Journal of Intelligent & Robotic Systems, 84, 575-599. https://doi.org/10.1007/s10846-015-0301-4
- 13. Senkul, F. and Altug, E. (2013) Modeling and Control of a Novel Tilt-Roll Rotor Quadrotor UAV. In: 2013 International Conference on Unmanned Aircraft Systems (ICUAS), IEEE, New York, 1071-1076. https://doi.org/10.1109/ICUAS.2013.6564796
- 14. Wu, H.-S., Lu, W.-Z. and Wang, Y.-L. (2015) Research on the Structure Design and Flight Performance of a Small Tilt Rotor Unmanned Aircraft. In: 2015 Chinese Automation Congress (CAC), IEEE, New York, 1979-1985.
- 15. Elfeky, M., Elshafei, M., Saif, A.-W.A., et al. (2016) Modeling and Simulation of Quadrotor UAV with Tilting Rotors. International Journal of Control Automation and Systems, 14, 1047-1054. https://doi.org/10.1007/s12555-015-0064-5
- 16. 薛立鹏, 邵松, 张呈林. 变直径倾转旋翼设计研究[J]. 机械科学与技术, 2008(10): 1202-1206.
- 17. Chen, Z.J., Stol, K.A. and Richards, P.J. (2019) Preliminary Design of Multirotor UAVs with Tilted-Rotors for Improved Disturbance Rejection Capability. Aerospace Science and Technology, 92, 635-643. https://doi.org/10.1016/j.ast.2019.06.038
- 18. Yeo, H. and Johnson, W. (2009) Performance and Design In-vestigation of Heavy Lift Tilt-Rotor with Aerodynamic Interference Effects. Journal of Aircraft, 46, 1231-1239. https://doi.org/10.2514/1.40102
- 19. Kahvecioglu, A.C. and Alemdaroglu, N. (2015) Optimal Design of a Miniature Quad Tilt Rotor UAV. In: 2015 International Conference on Unmanned Aircraft Systems (ICUAS’15), IEEE, New York, 1118-1127. https://doi.org/10.1109/ICUAS.2015.7152404
- 20. Hassanalian, M., Salazar, R. and Abdelkefi, A. (2019) Conceptual Design and Optimization of a Tilt-Rotor Micro Air Vehicle. Chinese Journal of Aeronautics, 32, 369-381. https://doi.org/10.1016/j.cja.2018.10.006
- 21. 窦炳耀, 雷武涛, 王维军. 面向方案设计的倾转旋翼飞机短距起飞性能[J]. 科学技术与工程, 2019, 19(7): 273-277.
- 22. 张飞, 路平. 倾转旋翼机倾转模式控制和倾转策略分析[J]. 飞航导弹, 2016(11): 54-56+92.
- 23. Yuksek, B., Vuruskan, A., Ozdemir, U., et al. (2016) Transition Flight Modeling of a Fixed-Wing VTOL UAV. Journal of Intelligent & Robotic Systems, 84, 83-105. https://doi.org/10.1007/s10846-015-0325-9
- 24. Haixu L, Xiangju Q, Weijun W. (2010) Multi-Body Motion Modeling and Simulation for Tilt Rotor Aircraft. Chinese Journal of Aeronautics, 23, 415-422. https://doi.org/10.1016/S1000-9361(09)60236-3
- 25. Zhang, X., Xu, W., Shi, Y., et al. (2017) Study on the Effect of Tilting-Rotor Structure on the Lift of Small Tilt Rotor Aircraft. In: 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), IEEE, New York, 380-385. https://doi.org/10.1109/ICARM.2017.8273192
- 26. Liang, Y., Ying, Z., Shuo, Y., et al. (2016) Numerical Simulation of Aerodynamic Interaction for a Tilt Rotor Aircraft in Helicopter Mode. Chinese Journal of Aeronautics, 29, 843-854. https://doi.org/10.1016/j.cja.2016.06.001
- 27. Ying, Z., Liang, Y. and Shuo, Y. (2015) Numerical Study on Flow Fields and Aerodynamics of Tilt Rotor Aircraft in Conversion Mode Based on Embedded Grid and Actuator Model. Chinese Journal of Aeronautics, 28, 93-102. https://doi.org/10.1016/j.cja.2014.12.028
- 28. Kang, Y., Kim, N., Kim, B.-S., et al. (2014) Autonomous Waypoint Guidance for Tilt-Rotor Unmanned Aerial Vehicle That Has Nacelle-Fixed Auxiliary Wings. Proceedings of the Institution of Mechanical Engineers Part G—Journal of Aerospace Engineering, 228, 2695-2717. https://doi.org/10.1177/0954410014525127
- 29. 伍咏成, 陈自力, 季近健. 一种倾转四旋翼无人机气动特性研究[J]. 兵器装备工程学报, 2020, 41(3): 72-75.
- 30. Gibertini, G., Auteri, F., Campanardi, G., et al. (2011) Wind-Tunnel Tests of a Tilt-Rotor Aircraft. Aeronautical Journal, 115, 315-322. https://doi.org/10.1017/S0001924000005790
- 31. 陈坤, 史志伟, 孙加亮. 倾转三旋翼飞行器地面效应风洞试验[J]. 航空学报, 2015, 36(9): 2884-2891.
- 32. 李尚斌, 林永峰, 樊枫. 倾转旋翼气动特性风洞试验与数值模拟研究[J]. 工程力学, 2018, 35(6): 249-256.
- 33. 郑光廷, 王琦, 陈龙胜, 等. 基于遗传算法整定PID的倾转翼飞机过渡段定高控制[J]. 航空兵器, 2020, 27(6): 85-90.
- 34. 宋晓东, 吴斌, 桑涛. 基于增益调度法的倾转旋翼控制系统设计[J]. 弹箭与制导学报, 2021, 41(6): 23-28.
- 35. Chowdhury, A.B., Kulhare, A. and Raina, G. (2012) Back-Stepping Control Strategy for Stabilization of a Tilt-Rotor UAV. In: Proceedings of the 2012 24th Chinese Control and Decision Conference (CCDC), IEEE, New York, 3475-3480. https://doi.org/10.1109/CCDC.2012.6244555
- 36. 黄琴. 基于北斗通信技术的无人机运动轨迹跟踪控制系统设计[J/OL]. 计算机测量与控制: 1-8. https://kns.cnki.net/kcms/detail/11.4762.TP.20220818.0927.008.html, 2022-08-18.
- 37. Invernizzi, D. and Lov-era, M. (2018) Trajectory Tracking Control of Thrust-Vectoring UAVs. Automatica, 95, 180-186. https://doi.org/10.1016/j.automatica.2018.05.024
- 38. Rego, B.S. and Raffo, G. (2019) Suspended Load Path Tracking Control Using a Tilt-Rotor UAV Based on Zonotopic State Estimation. Journal of the Franklin Insti-tute—Engineering and Applied Mathematics, 356, 1695-1729. https://doi.org/10.1016/j.jfranklin.2018.08.028
- 39. Santos, M.A. and Raffo, G.V. (2016) Path Tracking Model Predictive Control of a Tilt-Rotor UAV Carrying a Suspended Load. In: 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), IEEE, New York, 1458-1463. https://doi.org/10.1109/ITSC.2016.7795749
- 40. Flores, G.R., Escareno, J., Lozano, R., et al. (2012) Quad-Tilting Rotor Convertible MAV: Modeling and Real-Time Hover Flight Control. Journal of Intelligent & Robotic Systems, 65, 457-471. https://doi.org/10.1007/s10846-011-9589-x
- 41. Oosedo, A., Abiko, S., Narasaki, S., et al. (2015) Flight Control Systems of a Quad Tilt Rotor Unmanned Aerial Vehicle for a Large Attitude Change. In: 2015 IEEE In-ternational Conference on Robotics and Automation (ICRA), IEEE Computer Society, Los Alamitos, 2326-2331. https://doi.org/10.1109/ICRA.2015.7139508
- 42. 王栋, 鲜斌. 倾转式三旋翼无人机的自适应鲁棒容错控制[J]. 控制理论与应用, 2020, 37(4): 784-792.
- 43. Park, S., Bae, J., Kim, Y., et al. (2013) Fault Tolerant Flight Control System for the Tilt-Rotor UAV. Journal of the Franklin Institute—Engineering and Applied Mathematics, 350, 2535-2559. https://doi.org/10.1016/j.jfranklin.2013.01.014
- 44. Liu, H., Wang, H. and Sun, J. (2017) Attitude Control for Tilt Rotorcraft Based on Sliding Mode Containing Disturbance Observer. In: 2017 4th International Conference on Systems and Informatics (ICSAI), IEEE, New York, 84-88. https://doi.org/10.1109/ICSAI.2017.8248268
NOTES
*通讯作者。