Advances in Applied Mathematics
Vol.
10
No.
12
(
2021
), Article ID:
47558
,
13
pages
10.12677/AAM.2021.1012472
区间二型模糊系统的自适应事件触发H∞控制
郭西亚,孙雷,吴玲玲
上海理工大学,理学院,上海
收稿日期:2021年11月23日;录用日期:2021年12月13日;发布日期:2021年12月29日

摘要
本文研究了自适应事件触发情形下的一类具有时变时滞区间二型Takagi-Sugeno (T-S)模糊网络化系统的H∞控制问题。首先,提出了一种新颖的自适应事件触发机制。与传统的触发机制相比,该机制通过动态调整事件触发阈值来调节数据传输的数量,在保持良好的控制性能的同时改善有限的网络资源的利用效率。其次,利用构造的时滞相关的李雅普诺夫函数以及自由权矩阵,获得了闭环系统满足给定H∞性能指标的充分条件。在此基础上,借助于奇异值分解技术,给出了基于线性矩阵不等式解的控制器增益参数。最后,通过数值仿真例子验证了该方法的有效性。
关键词
区间二型T-S模糊系统,自适应事件触发机制,输出反馈控制器,奇异值分解

Adaptive Event-Triggered H∞ Control for Interval Type-2 Fuzzy System
Xiya Guo, Lei Sun, Lingling Wu
College of Science, University of Shanghai for Science and Technology, Shanghai
Received: Nov. 23rd, 2021; accepted: Dec. 13th, 2021; published: Dec. 29th, 2021

ABSTRACT
In this paper, the control H∞ problem is investigated for a class of interval type-2 Takagi Sugeno (T-S) fuzzy networked systems with time-varying delay under an adaptive event-triggering scheme. Compared with the traditional event-triggering ones, a novel adaptive event triggering mechanism proposed can effectively regulate the number of data transmissions by dynamically adjusting the event trigger threshold, which can improve the utilization efficiency of limited network resources while maintaining good control performance. Second, by using the delay-dependent Lyapunov function and the free weight matrix, a sufficient condition is obtained to guarantee the given H∞ performance index of the closed-loop systems. In light of obtained condition combined with the singular value decomposition technique, the desired controller gain parameters are obtained based on the solution of a set of linear matrix inequalities. Finally, a numerical example is given to verify the effectiveness of the proposed method.
Keywords:Interval Type-2 Takagi-Sugeno (T-S) Fuzzy Systems, Adaptive Event-Triggered Control Mechanism, Static Output Feedback Controller, Singular Value Decomposition

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
实际工业应用中的系统多是非线性的。相对于线性系统而言,其建模要困难得多 [1] [2]。幸运地,得益于可通过使用隶属度函数连接的局部线性系统来描述具有任意精度的非线性函数这一特性,T-S模糊系统理论已经被广泛应用于复杂的非线性系统的性能分析 [3]。当实际系统中存在不确定性信息时,文 [4] 提出了基于一型模糊集的T-S模糊模型(即一型T-S模糊模型),为系统分析和控制器设计提供了通用的框架。然而,当非线性系统的参数一旦具有不确定性,现有的一型模糊逻辑控制方法不能很好地处理这种不确定性,因此,区间二型T-S模糊模型应运而生 [5]。参数的不确定性可以通过区间二型T-S模糊集的上、下隶属度函数来捕获。进而,区间二型T-S模糊模型可以看作是若干个一型T-S模糊模型的集合。近年来,许多专家学者对区间二型T-S模糊网络化控制系统的稳定、故障检测和滤波器设计做了大量研究 [6] [7] [8]。在实际应用中,状态变量通常不可测,或者测量代价高。因此,需要设计一个静态输出反馈控制器,从而实现系统的稳定性能 [9]。然而,由于系统矩阵和控制器增益矩阵之间存在交叉项,已有许多文章论证了基于双线性不等式或包含等式约束方法的模糊系统在静态输出反馈方案下的稳定性条件 [10] [11]。
值得一提的是,时变延迟在工程应用中很普遍。时变延迟往往导致系统恶化、振荡或不稳定,且往往又不可避免,因此该现象引起了相当多的研究关注,并成为控制理论中热门主题。基于构建相应的李雅普诺夫函数,文 [12] [13] 研究了时延系统的稳定性问题,提出了一种用松弛矩阵的方法来处理奇异系统的时间延迟,根据文章结果显示,该方法比现有的方法保守性更小。随着传感器技术以及通信技术的快速发展,网络化控制系统因其维护方便、灵活性高等优点,近年来受到广泛的关注。但是,由于受到有限的网络信道资源限制,数据传输过程中可能会导致数据包丢失,从而导致系统不稳定。因此,为了提高网络化控制系统数据传输效率,文 [14] [15] 提出了事件触发机制以减轻网络带宽的负担。不同于传统控制系统的周期性采样和传输,因其在控制设计中没有考虑系统的动态特性,可能导致冗余的数据传输,因此作为周期性时间触发控制的代替方案,事件触发通过减少不满足触发机制的数据传输,节省了更多有限的网络资源,同时又保证了理想的控制性能。文 [16] 提出了一种基于静态事件触发机制的多智能体系统安全控制。文 [17] 为神经网络系统设计了一个基于动态事件触发的估计器。由于事件触发条件的阈值可能会影响控制任务的性能,然而,在传统的事件触发条件的设计中,阈值为预先确定的常数,很难适应系统的变化,也就是说,要设计的事件触发参数需适应外部的变化 [18]。因此为了得到能根据外部变化而变化的事件触发参数是一个很大的挑战。
基于此,本文研究了自适应事件触发情形下的一类区间二型T-S模糊时变时滞系统的控制问题,其主要贡献点如下:
1) 提出了一种新的自适应事件触发通信机制用来减轻网络带宽负担,其事件触发条件阈值根据传输的数据实时调整;
2) 利用构造的时滞相关的李雅普诺夫函数以及自由权矩阵,获得了闭环系统满足给定H∞性能指标的充分条件;
3) 借助于奇异值分解技术,给出了基于线性矩阵不等式解的控制器增益参数。
符号说明: 和 分别表示n维的欧式空间和 阶实数矩阵的集合。 表示具有适当维度的单位矩阵。 表示 的表达,其中 为矩阵 的转置。对于 ,当 ( )时,表示矩阵 为实对称正定(负定)矩阵。矩阵中的 表示对称矩阵中相应的对称部分。 表示矩阵的2范数。
2. 问题描述
2.1. 区间二型T-S模糊模型
考虑如下具有外部扰动的区间二型T-S模糊时变时滞系统
系统规则i:如果 是 ,且 是 ,且 ,且 是 ,则
(1)
其中, 、 、 、 和 分别表示系统状态、控制输出、测量输出、控制输入和外部扰动; 是时变时滞,满足 。这里 和 是已知的正常数,分别表示最小延迟和最大延迟。显然,当 时,意味着延迟 是时不变的。进而,在该系统中, 表示第i个系统规则,系统规则总数为r个; 表示区间二型第a个模糊集; 和 分别表示前提变量 属于区间二型模糊集 的上、下隶属度函数。显然,在任意规则下有 。此外, 、 、 、 、 和 为具有适当维数的已知常矩阵。系统的初始条件为 。
根据区间二型模糊建模准则,上、下隶属度函数定义为
(2)
其中, 。
接下来,引入状态相关的加权参数 和 ,并且满足 。然后,归一化的隶属度函数 具有如下形式
其中 和 。
综上所述,区间二型T-S模糊模型可表示为如下形式
(3)
2.2. 自适应事件触发通信机制
为了减轻通讯负担,本文采用自适应事件触发的传输策略来管理传感器和控制器之间的数据传输。为了描述这种通信机制,记触发的时间序列为 ,且 。进而,触发时刻由下述条件决定
(4)
其中, 代表上一触发时刻的测量输出与当前时刻的测量输出之差, 是一个给定的权重矩阵,并且 。 是一个可变的阈值,满足以下条件
(5)
其中
这里, 和 分别是阈值的上界和下届,满足 , 是给定的参数满足 。
注1符号函数 用来调阈值参数的大小,当 时,则有 ,因此可得 。在这种情况下,较小的阈值参数使得触发条件更容易满足,从而数据更容易传输。相反,当 时,则有 ,这意味着采用较大的阈值来实现较低的通信频率,节省更多的通信资源。
根据(4)式中的触发条件,可以推断出以下不等式始终成立
(6)
2.3. 区间二型模糊控制器
在本文中,采用并行分布补偿策略,基于事件触发机制的模糊控制器与区间二型模糊系统的隶属度函数相同,其设计如下
控制器规则j:如果 是 ,且 是 ,且 ,且 是 ,则
(7)
其中 是待定的反馈增益矩阵。
同理,区间二型输出反馈控制器可表示为
(8)
为了简化隶属度函数描述,定义 结合(3)和(8)式,可得闭环控制系统为
(9)
本文的主要研究目的是,设计基于事件触发机制的模糊控制器(8)使得下述两个条件同时满足:
1) 当 时,闭环系统(9)式是均方渐进稳定的;
2) 对于任何非零 ,给定标量 ,在零初始条件下的受控输出 满足H∞指标
(10)
3. 主要结果
3.1. 稳定性分析
引理1 [19] 、 和 是具有合适维度的矩阵, 是满足 的函数。当且仅当 和 ,有
(11)
定理1 给定常数 、 和矩阵 ,如果存在正定矩阵 ,, 和矩阵 、 、 、 使得如下条件
(12)
(13)
成立,那么称闭环系统(9)是渐进稳定的,且满足给定的H∞性能,其中 ,,
证明 定义 ,构建如下李雅普诺夫函数
(14)
其中 ,,。并且 、 、 为
合适维数的正定对称矩阵。
定义 ,然后可得
(15)
为了方便分析,这里定义 ,然后,对(15)式中右端的相关项,进一步分析有
(16)
其中 。
相似的,不难有
(17)
另一方面,引入松弛矩阵 和 ,有
(18)
(19)
其中 ,。
记 、 和 是具有合适维度的矩阵,由不等式 可知存在矩阵 使得以下不等式成立
(20)
(21)
考虑事件触发条件 和 ,对任意正数 ,必然有如下不等式成立
(22)
综合(15)~(22),我们有
(23)
其中 。
由引理1和Schur补可知,如果
则有 。进一步考虑考虑隶属度函数信息以及条件(12)~(13),不难有
等价地,
(24)
因此,我们有
(25)
对上式k从0到∞求和可得
(26)
在零初始条件下和 可得
(27)
这意味着,对于任何非零 ,模糊控制系统在H∞性能下满足渐进稳定准则。
当 时,由(25)式可得 ,即闭环控制系统是均方渐进稳定的。证毕。
3.2. 设计控制器增益公式
在定理1中,在控制器增益 已知的条件下分析了闭环系统的稳定性和H∞性能。然而,在闭环系统控制器设计的过程中, 是一个待设计的矩阵变量,这时(12)和(13)式不再是线性矩阵不等式。为了解决此类问题,对矩阵 和 施加约束,使其满足 ,其中 是新的矩阵变量。这样将 和 合并为一个矩阵变量,从而将相关问题转化为求线性矩阵不等式的可行解。
假设1 是列满秩的,其奇异值分解为
(28)
其中 ,, 是矩阵 的奇异值按大小降序组成的对角矩阵。
定理2 给定的常数 、 、 和矩阵 ,如果存在正定矩阵 ,, 和矩阵 、 、 、 、 使得如下条件
(29)
(30)
成立,那么取控制器增益
(31)
则闭环系统(9)是渐进稳定的,且满足给定的H∞性能,其中 ,,
其中 。
一方面,对于任意正标量 ,有以下不等式成立
(32)
进而得出 。
另一方面,由矩阵 的奇异值分解可知
(33)
当矩阵 采用如下结构 [20]
(34)
时,我们有
(35)
其中 、 。
综合(33)~(35),可知
(36)
由 可知,选择
(37)
可得
最后采用变量代换 可得条件(29)和(30)成立。
此外,不难验证有如下等式成立
从上式可知, ,,根据定理1,有闭环系统是渐进稳定且满足给定的H∞性能。证毕。
4. 数值仿真
本文借助于一个数值仿真的例子来验证所提方法的有效性,考虑到具有两条规则的区间二型模糊模型。
系统规则i:如果 是 ,则
其中
,,,,,
,,,,
,
此外,区间二型模糊系统的上、下隶属度函数定义如下
给定系统初始状态和外部扰动分别为 和 ,令 、 和 。自适应事件触发初始值和参数分别为 和 、 、 ,给定的权重矩阵 。
然后,求解定理2中的线性矩阵不等式,获得如下的反馈增益矩阵
图1表明,所提出的自适应事件触发机制可以有效地降低数据传输率,减轻网络负担;其次,自适应事件触发的阈值如图2所示,使得满足触发条件的数据变少,相比传统的事件触发机制触发的次数更少了。从图3可以看出,使用所提出的方法得到的控制信号是一个阶梯函数,在不满足触发条件的时间段数值保持不变。

Figure 1. Release instants and release intervals
图1. 触发时刻和触发间隔
在时滞为 , 时,图4和图5分别给出了开环和闭环响应。从图4可以看出,如果没有控制器,开环系统是不稳定的,因此有必要设计这样的控制器。自适应事件触发效果如图1所示,结合图1和图5,可以看出该系统有较低的数据传输率和较好的控制性能。
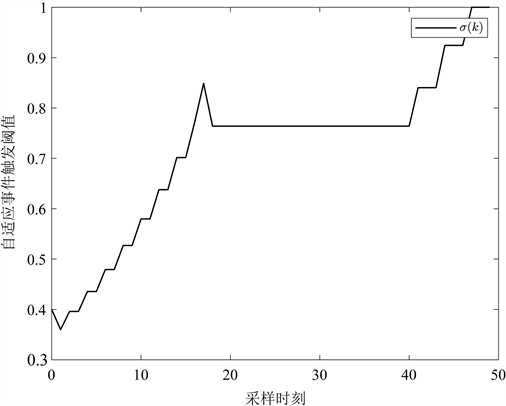
Figure 2. The threshold σ(k) of the system with adaptive event-triggering scheme
图2. 自适应事件触发阈值

Figure 3. Trajectory of control input signal u(k) under an adaptive event-triggering scheme
图3. 自适应事件触发下系统控制输入u(k)的轨迹

Figure 4. States responses of the open-loop system
图4. 开环系统状态响应

Figure 5. States responses of closed-loop system
图5. 闭环系统状态响应
5. 总结
针对一类网络化区间二型T-S模糊系统,本文提出了新的自适应事件触发通信方案,减少数据传输数量,提高了网络资源利用率。通过构造时延相关的李雅普诺夫函数,分析了控制系统的H∞性能。利用线性矩阵不等式推导出系统的可镇定性判据,得到了控制器增益矩阵。本文设计的静态输出反馈控制器,克服了时变时滞和外部干扰对系统的负面影响,保证了闭环系统的稳定性。仿真结果表明,该方法可以节省网络资源,用于分配其他通信任务。
本文未来的研究方向是将提出的理论方法扩展到基于传感器饱和的模糊系统中。另一方面本文也将会考虑较为复杂的模糊系统,即切换模糊系统、安全控制等,进一步研究所提出方法的有效性。
文章引用
郭西亚,孙 雷,吴玲玲. 区间二型模糊系统的自适应事件触发H∞控制
Adaptive Event-Triggered H∞ Control for Interval Type-2 Fuzzy System[J]. 应用数学进展, 2021, 10(12): 4433-4445. https://doi.org/10.12677/AAM.2021.1012472
参考文献
- 1. Yang, X.Z., Wu, L.G. and Lam, H.K. (2014) Stability and Stabilization of Discrete-Time T-S Fuzzy Systems with Stochastic Perturbation and Time-Varying Delay. IEEE Transactions on Fuzzy Systems, 22, 124-138. https://doi.org/10.1109/TFUZZ.2013.2249518
- 2. Zhao, T., Liu, J.H. and Dian, S.Y. (2019) Finite-Time Control for Interval Type-2 Fuzzy Time-Delay Systems with Norm-Bounded Uncertainties and Limited Communication Capacity. Information Sciences, 483, 153-173. https://doi.org/10.1016/j.ins.2019.01.044
- 3. Takagi, T. and Sugeno, M. (1985) Fuzzy Identification of Systems and Its Applications to Modeling and Control. IEEE Transactions on Systems, Man, and Cybernetics, SMC-15, 116-132. https://doi.org/10.1109/TSMC.1985.6313399
- 4. Kau, S.W., Lee, H.J. and Yang, C.M. (2007) Robust H∞ Fuzzy Static Output Feedback Control of T-S Fuzzy Systems with Parametric Uncertainties. Fuzzy Sets and Systems, 158, 135-146. https://doi.org/10.1016/j.fss.2006.09.010
- 5. Lam, H.K. and Seneviratne, L.D. (2008) Stability Analysis of Interval Type-2 Fuzzy-Model-Based Control Systems. IEEE Transactions on Systems, Man, and Cybernetics, 38, 617-628. https://doi.org/10.1109/TSMCB.2008.915530
- 6. Zhang, Z.N., Niu, Y.G. and Song, J. (2020) Input-to-State Stabilization of Interval Type-2 Fuzzy Systems Subject to Cyber Attacks: An Observer-Based Adaptive Sliding Mode Approach. IEEE Transactions on Fuzzy Systems, 28, 190-203. https://doi.org/10.1109/TFUZZ.2019.2902105
- 7. Pan, Y.N. and Yang, G.H. (2021) Event-Driven Fault Detection for Discrete-Time Interval Type-2 Fuzzy Systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 51, 4959-4968. https://doi.org/10.1109/TSMC.2019.2945063
- 8. Li, H.Y., Wu, C.W., Wu, L., Lam, H.-K. and Gao, Y. (2015) Filtering of Interval Type-2 Fuzzy Systems with Intermittent Measurements. IEEE Transactions on Cybernetics, 46, 668-678. https://doi.org/10.1109/TCYB.2015.2413134
- 9. Zhang, M., Shi, P., Shen, C. and Wu, Z.-G. (2019) Static Output Feedback Control of Switched Nonlinear Systems with Actuator Faults. IEEE Transactions on Fuzzy Systems, 28, 1600-1609. https://doi.org/10.1109/TFUZZ.2019.2917177
- 10. Wu, H.N. (2008) An ILMI Approach to Robust H2 Static Output Feedback Fuzzy Control for Uncertain Discrete-Time Nonlinear Systems. Automatica, 44, 2333-2339. https://doi.org/10.1016/j.automatica.2008.01.002
- 11. Han, Q.L., Liu, Y.R. and Yang, F.W. (2015) Optimal Communication Network-Based H∞ Quantized Control with Packet Dropouts for A Class of Discrete-Time Neural Networks with Distributed Time Delay. IEEE Transactions on Neural Networks and Learning Systems, 27, 426-434. https://doi.org/10.1109/TNNLS.2015.2411290
- 12. Li, H.Y., Jing, X.J. and Karimi, H.R. (2013) Output-Feedback-Based H∞ Control for Vehicle Suspension Systems with Control Delay. IEEE Transactions on Industrial Electronics, 61, 436-446. https://doi.org/10.1109/TIE.2013.2242418
- 13. Zhao, T. and Dian, S.Y. (2017) State Feedback Control for Interval Type-2 Fuzzy Systems with Time-Varying Delay and Unreliable Communication Links. IEEE Transactions on Fuzzy Systems, 26, 951-966. https://doi.org/10.1109/TFUZZ.2017.2699947
- 14. Sun, Y., Ding, D.R., Dong, H.L. and Liu, H. (2021) Event-Based Resilient Filtering for Stochastic Nonlinear Systems Via Innovation Constraints. Information Sciences, 546, 512-525. https://doi.org/10.1016/j.ins.2020.08.007
- 15. Chen, W., Ding, D.R., Ge, X.H., Han, Q.-L. and Wei, G. (2018) H∞ Containment Control of Multiagent Systems under Event-Triggered Communication Scheduling: The Finite-Horizon Case. IEEE Transactions on Cybernetics, 50, 1372-1382. https://doi.org/10.1109/TCYB.2018.2885567
- 16. Ding, D.R., Wang, Z.D., Ho, D.W.C. and Wei, G. (2016) Observer-Based Event-Triggering Consensus Control for Multiagent Systems with Lossy Sensors and Cyber-Attacks. IEEE Transactions on Cybernetics, 47, 1936-1947. https://doi.org/10.1109/TCYB.2016.2582802
- 17. Liu, H.J., Wang, Z.D., Fei, W.Y. and Li, J. (2020) Resilient H∞ State Estimation for Discrete-Time Stochastic Delayed Memristive Neural Networks: A Dynamic Event-Triggered Mechanism. IEEE Transactions on Cybernetics (Early Access). https://doi.org/10.1109/TCYB.2020.3021556
- 18. Peng, C., Zhang, J. and Yan, H. (2018) Adaptive Event-Triggering H∞ Load Frequency Control for Network-Based Power Systems. IEEE Transactions on Industrial Electronics, 65, 1685-1694. https://doi.org/10.1109/TIE.2017.2726965
- 19. Liu, Y., Yang, G.H. and Li, X.J. (2017) Event-Triggered Fault Detection Observer Design for Affine Fuzzy Systems. Neurocomputing, 267, 564-571. https://doi.org/10.1016/j.neucom.2017.06.033
- 20. Yang, F.W., Wang, Z.D., Hung, Y.S. and Gani, M. (2006) H∞ Control for Networked Systems with Random Communication Delays. IEEE Transactions on Automatic Control, 51, 511-518. https://doi.org/10.1109/TAC.2005.864207