Hans Journal of Wireless Communications
Vol.06 No.06(2016), Article ID:19411,9
pages
10.12677/HJWC.2016.66018
Laser Optimum High Repetition Rate Research for Spaceborne Single Photon 3D Imaging Laser Radar System
Xin Li*, Tao Song, Xiaofei Deng, Yang Liu
Shanghai Institute of Satellite Engineering, Shanghai

Received: Dec. 9th, 2016; accepted: Dec. 22nd, 2016; published: Dec. 28th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Spaceborne 3D imaging laser radar system takes full advantage of laser such as high energy density and good directivity, resulting in attractive feature of high imaging resolution, which has outstanding value in military and commercial applications. Subject to the limited power of spaceborne laser, it is necessary to adopt single photon detection due to the extremely long link distance. For single photon detection system, multi pulse detection can improve the detection probability. High repletion rate laser is one of the key technologies, and the current highest repletion rate of solid state laser is about several kHz. In this paper, the model of optimum laser repletion rate is built with consideration of satellite orbit velocity, orbit height, and system surface resolution. What is achieved in this dissertation contributes to the spaceborne 3D imaging laser radar system optimal design.
Keywords:Laser Radar, 3D Imaging, Single Photon Detection, High Repetition Rate

天基单光子三维成像激光雷达系统中激光器 高重频优化研究
李鑫*,宋涛,邓小飞,刘阳
上海卫星工程研究所,上海

收稿日期:2016年12月9日;录用日期:2016年12月22日;发布日期:2016年12月28日

摘 要
天基激光三维成像系统充分利用了激光能量密度高、方向性好的优势,在主动探测过程中可以获得比微波雷达更高的成像精度,在军事、民用等方面具有极高的应用价值。由于星载激光器功率受限,星地链路距离长,因此其探测体制为单光子探测。对于单光子探测来说,为了达到较高的探测概率,需采用多脉冲探测体制。高重频窄脉冲的激光器技术是天基激光三维成像系统的关键技术之一。受我国现有激光器技术限制,星载固体激光器的重频达到KHz以上难度极大。本文针对天基激光三维成像系统,对激光重频和卫星飞行速度、轨道高度间的关系进行了建模,并给出了激光重频和单光子系统探测概率间的关系,得到最佳激光重频与系统探测概率、卫星轨道高度、飞行速度等参数间的制约关系。本文研究结果对于激光三维成像雷达系统的优化设计给出了理论依据。
关键词 :激光雷达,三维成像,单光子探测,高重频

1. 引言
随着空间数据应用领域的不断扩大,现代社会对快速、准备、可靠地获取空间数据的要求也越来越高。星载三维激光成像技术是一种安装在卫星上的主动对地观测技术,与传统的微波雷达相比具有成像精度高的显著优点。然而由于作用距离远、星上激光器功率受限,要求探测器具有极高的灵敏度。
盖革模式的雪崩光电二极管(Geiger mode avalanche photodiodes, GM APD)具有单光子级的探测灵敏度,并且输出信号为数字信息,利于大规模集成 [1] [2] [3] [4] [5] 。以GM APD为探测器的三维成像系统具有灵敏度高、成像速度快、测距精度高、探测器集成度高、对激光器能量要求低、系统体积小、功耗低等多方面的优势,具备在军事和民用领域大规模应用的条件,是近年来研究的热点。基于GM APD探测器星载激光三维成像系统的探测概率是核心指标。
基于GM APD探测器,美国国防部和美国空军一直资助Lincoln实验室进行三维激光成像雷达系统的研究 [6] [7] [8] [9] 。Lincoln实验室研制出的Gen III脉冲三维成像激光雷达系统采用 的GM APD探测器,每个像元上都耦合了高速CMOS计时电路,用于确定光子的到达时间。该系统具有单光子探测灵敏度,3 cm范围的探测精度和可调的角分辨率,距离分辨率为15 cm。系统的激光器为高重频(1 kHz)的单脉冲能量为
的GM APD探测器,每个像元上都耦合了高速CMOS计时电路,用于确定光子的到达时间。该系统具有单光子探测灵敏度,3 cm范围的探测精度和可调的角分辨率,距离分辨率为15 cm。系统的激光器为高重频(1 kHz)的单脉冲能量为 的 Nd:YAG,700 ps FWHM @ 532 nm。飞行实验表明该系统最大作用距离为500 m。
的 Nd:YAG,700 ps FWHM @ 532 nm。飞行实验表明该系统最大作用距离为500 m。
目前基于GM APD激光三维成像系统的研究工作多集中在探测器的生产制造以及成像系统的集成和试验上,而对于星载激光雷达系统性能的理论分析则较少。对于天基激光三维成像雷达来说,激光重频是系统设计的关键,直接影响到系统探测概率,对激光重频的优化研究具有十分重要的意义。本文针对采用GM APD的星载激光三维成像系统,首先对其多脉冲探测体制下探测次数和探测概率的关系进行了研究,同时推导了卫星在轨高度、运行速度和多脉冲探测次数之间的关系,随后综合考虑系统探测概率和卫星轨道参数给出了系统激光最佳重频约束模型,并对不同系统指标下的最佳激光重频进行了仿真分析。
2. 天基激光三维成像系统
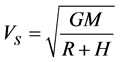
2.1. 单光子激光三维成像系统工作原理
采用GM APD阵列探测器的激光三维成像系统成像原理如图1所示。激光器发出的激光,经过整形照射到目标物体上。反射回的光照经接收光学系统成像到GM APD探测器上,转变为电子脉冲信号。利用输出脉冲记录返回光的到达时间,进而可反演得到目标的高程信息。随后结合GPS和INS最终获得地面三维高程图像。
2.2. 激光雷达方程
激光雷达方程是描述激光探测系统探测器接收到的能量与系统参数,以及链路参数之间相互关系的表达式。基于GM APD的成像系统中,回波强度较弱,一般用平均光子数来表征回波强度的大小。则每个像元上接收到的平均初级光电子数可以表示为 [10]
 (1)
(1)
其中, 为激光发射能量,
为激光发射能量, 是GM APD的量子效率,
是GM APD的量子效率, 是单个光子的能量,
是单个光子的能量, 为目标反射系数,
为目标反射系数, 是每个像元的视域面积,
是每个像元的视域面积, 是目标区域光斑面积,
是目标区域光斑面积, 为接收天线面积,
为接收天线面积, 为链路距离,
为链路距离, 是激光在大气中的传输损耗。
是激光在大气中的传输损耗。
公式(1)可以进一步等效为
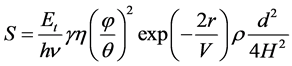 (2)
(2)
其中, 为探测器的填充因子,
为探测器的填充因子, 为单像元的视域,
为单像元的视域, 是激光束散角,
是激光束散角, 是大气能见度,
是大气能见度, 为接收天线直径。
为接收天线直径。
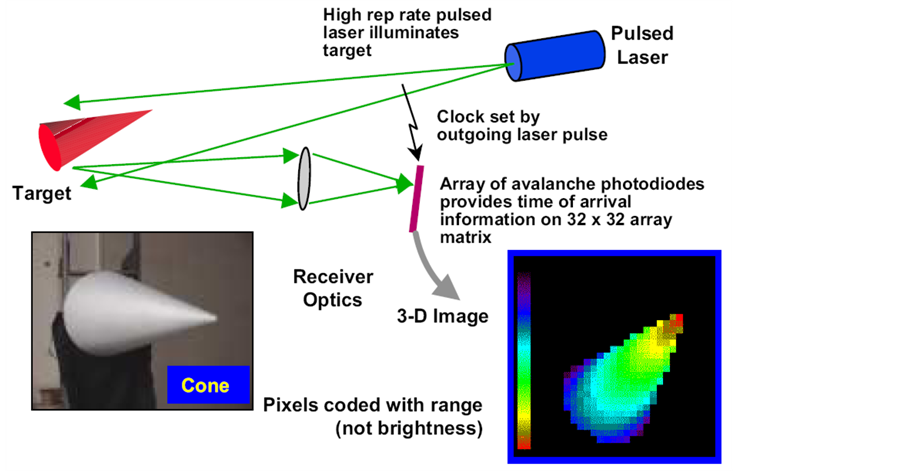
Figure 1. Imaging principle of laser 3D radar based on GM APD
图1. 基于GM APD的激光三维雷达成像原理
3. 背景噪声影响下多脉冲探测体制的探测概率
3.1. 单脉冲探测系统探测概率
单脉冲探测体制即,对每个目标采集区域仅成像一次。激光三维成像系统的探测概率取决于探测器的性能。对于GM APD来说,当探测器探测到的光子数大于等于一个时,则探测器被触发,探测到回波信号。研究表明回波信号近似服从Poisson分布。
为了减小大气后向散射以及探测器热噪声等引起的虚警概率,一般需要根据目标高程范围设定一段时间范围,这段时间称为探测波门,此时激光成像系统仅响应探测波门内的初级光电子。将探测波门等分为一定数量的时间片,假定目标回波信号产生的初级光电子只存在于某个确定的时间片内,且对于一个激光脉冲来说,单像元仅响应一次,之后处于死状态,直到下一个脉冲回波时再恢复盖革状态。假定将探测波门共分为 个时间片,每个时间片的时长为
个时间片,每个时间片的时长为 ,则目标被正确探测到的概率为 [10]
,则目标被正确探测到的概率为 [10]
 (3)
(3)
其中, 为探测波门内噪声光电子的平均数,包括暗电流噪声、大气后向散射噪声和其它相同频率的背景光噪声。
为探测波门内噪声光电子的平均数,包括暗电流噪声、大气后向散射噪声和其它相同频率的背景光噪声。
3.2. 多脉冲探测系统探测概率
对于天基星载激光三维成像系统来说,通过提高激光脉冲重频,使得在单位目标区域内进行连续多次探测来改善系统探测概率的过程即为多脉冲探测。
假定目标信号出现在第 个时间片内,则第
个时间片内,则第 个时间片内GM APD探测器被触发的概率
个时间片内GM APD探测器被触发的概率 可以表示为:
可以表示为:
 (4)
(4)
在总共 次脉冲的探测过程中,目标信号被正确探测到至少
次脉冲的探测过程中,目标信号被正确探测到至少 次的概率为
次的概率为
 (5)
(5)
那么多脉冲探测体制下GM APD激光三维成像系统的探测概率即为
 (6)
(6)
从公式(6)可以看出,当 时,公式(6)退化为公式(3)。
时,公式(6)退化为公式(3)。
多脉冲探测体制下,当每次探测返回信息均为地表真实值时,可以通过系统平均的方法提高系统探测精度。而对于单光子探测体系来说,由于其灵敏度极高,因此返回值可能为鬼点(ghost point,大气后向散射引起)。此时通过多次测量,可通过数据相关的后续处理从中滤出真实地表信息。因此,一般上要求多次脉冲探测过程中,至少正确探测次数 。
。
4. 星地相对运动对多脉冲探测次数影响
天基激光三维成像系统在实际工作过程中,由于卫星的高速运动以及地球的自转,系统每次测得的结果并不是同一目标的高程信息。而考虑到背静噪声影响下,为了保证系统探测概率,必须采用多脉冲探测体制,因此测量值是代表某一大区域的高程信息,此区域对应的即为系统平面精度。系统平面精度越高,所得到的DEM模型越精细。从上面分析可知,系统平面精度与星地相对运动速度以及激光脉冲重频均有关。因此,本小节首先建立了卫星地面轨迹速度模型,随后根据多脉冲探测体制的探测概率以及系统平面精度,综合给出了激光脉冲最佳重频。
4.1. 卫星地面轨迹速度
卫星地面轨迹速度是由卫星运动速度和星下点地球自转速度合成的,如图2所示。图中紫色箭头代表地心惯性坐标系下卫星的运动矢量,红色箭头代表地心惯性坐标系下星下点由于地球自转产生的运动矢量,黄色箭头为紫色矢量和红色矢量之差,即卫星地面轨迹速度矢量。
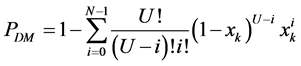
对于低轨卫星来说,根据万有引力定律其速度可以表示为
 (7)
(7)
其中, 为地心引力常数,R为地球半径,H为卫星轨道高度。
为地心引力常数,R为地球半径,H为卫星轨道高度。
将卫星运动速度投影到地面,则有
 (8)
(8)
而星下点由于地球自转产生的速度为
 (9)
(9)
其中, 为地球自转角速度,
为地球自转角速度, 为星下点纬度。
为星下点纬度。
根据上述三个速度矢量的几何关系,利用余弦定理可得卫星地面轨迹速度大小为
 (10)
(10)
其中, 为卫星轨道倾角。
为卫星轨道倾角。

Figure 2. Velocity track of satellite on ground
图2. 卫星地面轨迹速度矢量合成示意图
4.2. 系统平面精度和探测概率约束下的激光脉冲重频
通过上面分析可知,为了保证系统探测概率,至少要在同一个区域内的探测次数越多越好,即脉冲重频越高越好。而在一定激光重频条件下,星地间的相对运动又约束了系统的平面精度。因此综合考虑上述因素,可以得到系统探测概率、平面精度、星地相对运动等综合因素影响下的脉冲重频应满足
 (11)
(11)
其中, 为系统探测概率要求下的最小探测次数,由公式(6)给出。
为系统探测概率要求下的最小探测次数,由公式(6)给出。
此外,考虑到星下点维度不同的时候对应的 亦不同,为了保证在不同纬度均能满足系统指标要求,应将卫星地面轨迹速度取最大值
亦不同,为了保证在不同纬度均能满足系统指标要求,应将卫星地面轨迹速度取最大值 代入到公式(11)中,即
代入到公式(11)中,即
 (12)
(12)
取公式(11)中的最小值为系统最佳重频,即
 (13)
(13)
公式(11)表明,最佳激光脉冲重频与系统探测概率和星地相对运动速度成正比,与系统平面精度成反比。
5. 数值仿真与分析
本小节将利用前面推导得到的数学模型,通过数值仿真分别研究系统探测概率、系统平面精度、卫星轨道高度等因素对最佳激光脉冲重频的影响。
5.1. 系统探测概率
首先基于公式(3)和公式(6)对探测概率进行了数值仿真,采用链路和系统参数如下: 、
、 、
、 、
、 、
、 、
、 、
、 、
、 、
、 ,脉冲激光器的工作波长为1064 nm,探测景深为499,800 m到500,000 m,假定系统的距离分辨率为50 cm,则探测波门内的时间片总数为
,脉冲激光器的工作波长为1064 nm,探测景深为499,800 m到500,000 m,假定系统的距离分辨率为50 cm,则探测波门内的时间片总数为 ,每个时间片的时长为
,每个时间片的时长为 ,此时目标所在时间片内的平均光电子数为
,此时目标所在时间片内的平均光电子数为 ,当
,当 分别为
分别为 和
和 时,每个时间片内噪声平均光电子数对应为0.00033和0.0033个。由于目为了滤去鬼点信息,在仿真中要求对每个目标区域至少探测到3次真实目标信息,即
时,每个时间片内噪声平均光电子数对应为0.00033和0.0033个。由于目为了滤去鬼点信息,在仿真中要求对每个目标区域至少探测到3次真实目标信息,即 。
。
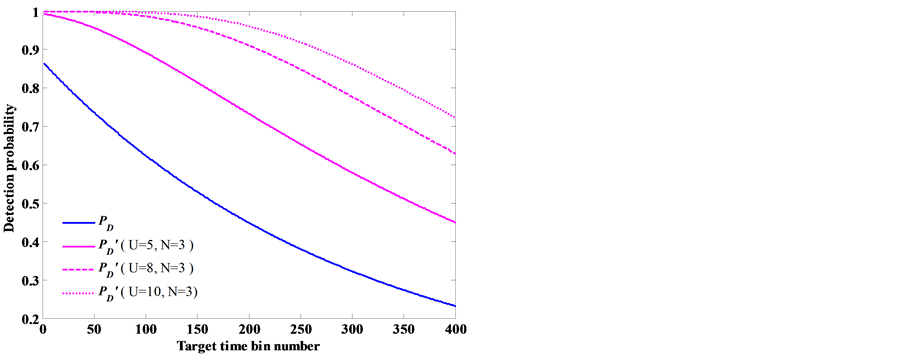
图3(a)和图3(b)分别为 和
和 时,单脉冲探测体制和多脉冲探测体制的探测器概率随目标所在时间片变化的关系图。图3(a)和图3(b)中,探测概率均随着目标所在时间片的变大而减小,这表明当目标处在探测景深内越远时,噪声在前端造成GM APD锁死的概率则越大,即通过结合星下点地表高度先验知识可大大改善系统探测概率。综合对比图3(a)和图3(b)可知,在多脉冲探测体制下系统的探测概率明显高于单脉冲体制;当多次成像的次数越多时,即系统对某一目标区域采样时间较长时,系统的探测概率则越大;当系统条件一定时,背景光等噪声越大系统对应的探测概率则越小。此外,图3(b)表明,在上述系统条件下,且
时,单脉冲探测体制和多脉冲探测体制的探测器概率随目标所在时间片变化的关系图。图3(a)和图3(b)中,探测概率均随着目标所在时间片的变大而减小,这表明当目标处在探测景深内越远时,噪声在前端造成GM APD锁死的概率则越大,即通过结合星下点地表高度先验知识可大大改善系统探测概率。综合对比图3(a)和图3(b)可知,在多脉冲探测体制下系统的探测概率明显高于单脉冲体制;当多次成像的次数越多时,即系统对某一目标区域采样时间较长时,系统的探测概率则越大;当系统条件一定时,背景光等噪声越大系统对应的探测概率则越小。此外,图3(b)表明,在上述系统条件下,且 时,多脉冲探测概率远大于单脉冲时的探测概率;且多次成像方式下系统的探测概率均高于98%。
时,多脉冲探测概率远大于单脉冲时的探测概率;且多次成像方式下系统的探测概率均高于98%。
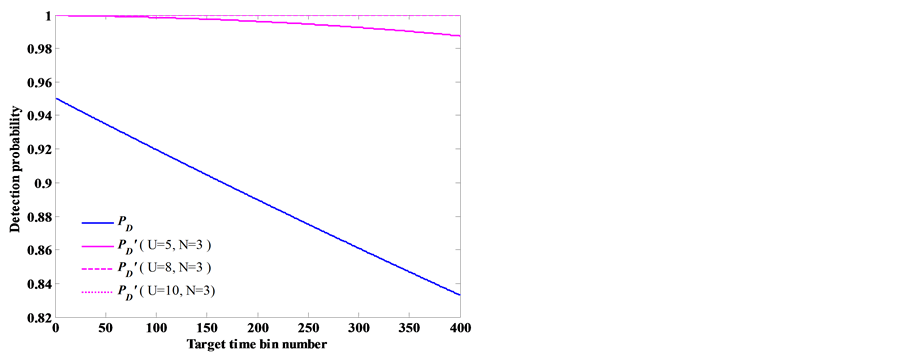
 (b)
(b) 
图3. 不同采样次数下的探测概率
5.2. 卫星地面轨迹速度
依据公式(10)对星下点不同纬度时的卫星地面轨迹速度进行仿真,结果如图4所示。系统仿真参数取:轨道高度 ,轨道倾角
,轨道倾角 ,地心引力常数
,地心引力常数 m3/s2,地球自转角速度
m3/s2,地球自转角速度 rad/s,地球半径
rad/s,地球半径 。
。
从图4可以看出,随着纬度的增加卫星地面轨迹呈现先增大后减小的趋势,且在赤道附近达到最大值。因此为了使系统性能在对不同纬度地区成像时候均满足系统捕获概率、平面精度等指标,应以赤道附近( )的
)的 为
为 ,进而对最佳激光脉冲频率进行分析。
,进而对最佳激光脉冲频率进行分析。
5.3. 最佳激光脉冲重频
根据上面对系统探测概率和卫星地面轨迹速度的仿真分析结果,取最小探测次数 (对应系统探测概率分别为98.5%、99.9%、99.999%),
(对应系统探测概率分别为98.5%、99.9%、99.999%), km/s,根据公式(13)进行数值仿真,得到系统平面精度对最佳重频的影响关系如图5所示。
km/s,根据公式(13)进行数值仿真,得到系统平面精度对最佳重频的影响关系如图5所示。
从图5可以看出,激光最佳重频随着系统平面精度的提高而逐渐增加,且当最小探测次数要求越高时,对应的激光重频就越高。由此可见,当系统探测概率和系统平面精度越高的情况下,对激光脉冲重频的要求就越高。且在本论文的系统仿真参数下,平面精度小于10 m时对应的激光重频均大于KHz,即对高重频激光的研制提出很高要求。
6. 结论
通过对天基单光子三维成像激光雷达系统工作过程进行分析,提出了系统探测概率、系统平面分辨率、星地相对运动等综合因素约束下激光脉冲最佳重频的设计方法。首先建立了多脉冲探测体制下系统探测概率模型,给出了多脉冲探测系数和探测概率间关系。随后通过对卫星运动以及地球自转等因素的分析,建立了卫星地面轨迹速度模型,并给出了系统平面精度和卫星地面轨迹速度关系。进而,基于上述模型,推导得到了激光脉冲最佳重频与探测概率、平面精度、卫星轨道高度、轨道倾角等系统因素间的影响关系模型。仿真分析结果表明,激光脉冲最佳重频随系统探测概率的增加而增加,随系统平面分辨率的提高而增加。本文的研究工作可以为激光三维成像雷达系统的优化设计提供理论依据。

Figure 4. Velocity track of satellite on ground varies with latitude
图4. 卫星地面轨迹速度随纬度变化关系

Figure 5. Optimum laser pulse repetition rate varies with system surface resolution for different 
图5. 不同最小探测次数下,激光最佳重频随系统平面精度变化关系
致谢
本文研究工作由自然科学基金委的青年基金进行支持,基金号:61401279。
文章引用
李 鑫,宋 涛,邓小飞,刘 阳. 天基单光子三维成像激光雷达系统中激光器高重频优化研究
Laser Optimum High Repetition Rate Research for Spaceborne Single Photon 3D Imaging Laser Radar System[J]. 无线通信, 2016, 06(06): 142-150. http://dx.doi.org/10.12677/HJWC.2016.66018
参考文献 (References)
- 1. Manamon, P.F. (2010) A History of Laser Radar in the United State. Proceedings of SPIE, 7684, 76840T.
- 2. Molebny, V., Ka-merman, G. and Steinvall, O. (2010) Laser Radar: From Early History to New Trends. Proceedings of SPIE, 7835, 783502.
- 3. Molebny, V., Zarubin, P. and Kamerman, G. (2010) The Dawn of Optical Radar: A Story from Another Side of the Globe. Proceedings of SPIE, 7684, 76840B. https://doi.org/10.1117/12.850086
- 4. Jin, C.F., Sun, X.D., Zhao, Y., Zhang, Y. and Liu, L.P. (2009) Gain-Modulated Three-Dimensional Active Imaging with Depth-Independent Depth Accuracy. Optics Letters, 34, 3550-3552. https://doi.org/10.1364/OL.34.003550
- 5. Zhang, X.D. and Yan, H.M. (2011) Three-Dimensional Active Imaging with Maximum Depth Range. Applied Optics, 50, 1682-1686.
- 6. Xia, G.F. and Zhao, B.J. (2007) Detection of Air Target Based on Multi-Fractal Analysis in A Laser Radar. Chinese Optics Letters, 5, 51-53.
- 7. Totems, J., Jolivet, V. and Ovarlez, J.P. (2010) Ad-vanced Signal Processing Methods for Pulsed Laser Vibrometry. Applied Optics, 49, 3967-3978. https://doi.org/10.1364/AO.49.003967
- 8. Cottin, P., Babin, F., Cantin, D., Deslauriers, A. and Sylvestre, B. (2010) Active 3D Camera Design for Target Capture on Mars Orbit. Proceedings of SPIE, 7684, 768403. https://doi.org/10.1117/12.850169
- 9. Redman, B.C., Stann, B., Lawler, W., et al. (2006) Chirped AM Ladar for Anti-Ship Missile Tracking and Force Protection 3D Imaging: Update. Proceedings of SPIE, 6241, 62410O. https://doi.org/10.1117/12.666961
- 10. Markus, H. (2005) Detection Probabilities for Photon Counting Avalanche Photodiodes Ap-plied to a Laser Radar System. Applied Optics, 44, 5140-5147. https://doi.org/10.1364/AO.44.005140
NOTES
*通讯作者。