Computer Science and Application
Vol.
11
No.
07
(
2021
), Article ID:
43855
,
8
pages
10.12677/CSA.2021.117193
一种模拟飞虫视觉运动感知的U-LSPIV 测量系统
沈克永1,杨扬1,徐梦溪2,吴晓彬2,陆云扬3
1南昌理工学院计算机信息工程学院,江西 南昌
2南京工程学院计算机工程学院,江苏 南京
3水利部南京水利水文自动化研究所,江苏 南京

收稿日期:2021年6月10日;录用日期:2021年7月6日;发布日期:2021年7月14日

摘要
通过光学成像观测水流示踪(物)目标,进而测量河流表面二维流速场技术,即LSPIV (large-scale particle image velocimetry)技术,它与常规的转子流速仪、声学、雷达和激光多普勒测速等技术和方法相比,具有诸多优点。然而,目前大多数的LSPIV系统是基于地面固定摄像头测量的,即使是采用基于无人机(unmanned aerial vehicle)的测量,在万平方米以上的超大尺度水面流场成像测量应用中,因受到施测作业区域、天气及光照、水流条件、河–气界面(大气–水体交界面)成像环境下杂乱光线混叠扰动等因素的影响,测量的精度及其稳定性严重受限。为此,本文提出一种模拟飞行昆虫–蜻蜓复眼视觉运动感知的U-LSPIV测量系统设计模式,采用DJI大疆如风系列WIND 8无人机搭载测量仪器,基于光学成像观测水面,通过模拟飞行昆虫–蜻蜓复眼从水面杂乱光线混叠扰动的背景中准确辨识感兴趣目标,所具有的高适应性和高可靠性的自然特性,以及借鉴轻量和低功率的视叶(lightweight and low-powered optic lobe)神经计算范式,以提升水面全场流速场及断面流量的测量精度和稳定性。本文提出的新颖设计模式为适应于野外环境超大尺度的LSPIV测量应用提供了有效的解决方案。
关键词
河面流速场测量,无人机,大尺度粒子图像测速,飞虫复眼

A U-LSPIV Measurement System Simulating Visual Motion Perception of Flying Insects
Keyong Shen1, Yang Yang1, Mengxi Xu2, Xiaobin Wu2, Yunyang Lu3
1School of Computer Information Engineering, Nanchang Institute of Technology, Nanchang Jiangxi
2School of Computer Engineering, Nanjing Institute of Technology, Nanjing Jiangsu
3Nanjing Institute of Water Resources and Hydrology Automation, Ministry of Water Resources, Nanjing Jiangsu

Received: Jun. 10th, 2021; accepted: Jul. 6th, 2021; published: Jul. 14th, 2021

ABSTRACT
Large-scale particle image velocimetry (LSPIV) is a two-dimensional velocity field technology to measure the river surface by optical imaging observation of flow tracer (object) target, which has many advantages compared with the conventional rotor velocimeter, acoustics, radar and laser Doppler velocimetry. However, at present, most of the LSPIV system is based on the ground fixed camera measurement, even if the measurement is based on unmanned aerial vehicle. In the application of ultra-large scale surface flow field imaging measurement over ten thousand square meters, the accuracy and stability of the measurement are severely limited due to the influence of the operating area, weather and illumination, water flow conditions, and the disturbance of chaotic light aliasing in the imaging environment of the river-air interface (atmosphere-water interface). Therefore, this paper proposes a design pattern of U-LSPIV measurement system for simulating complex eye visual motion perception of flying insect-dragonfly, by using the DJI Enterprise WIND series WIND 8 UAVs carrying measuring instrument. Based on optical imaging observation of the water surface, by simulating compound eye of flying insect-dragonfly in the background of the disturbance of chaotic light aliasing to identify accurately the target of interest, the natural characteristics of high adaptability and high reliability, and the lightweight and low-power optic lobe neural computing paradigm are used to improve the accuracy and stability of the measurement of the full-field velocity field and sectional flow in the water surface. The novel design pattern proposed in this paper provides an effective solution for the application of LSPIV measurement in the field environment at ultra-large scale.
Keywords:Measurement of River Surface Velocity Field, Unmanned Aerial Vehicle, Large-Scale Particle Image Velocimetry, Flying Insect’s Compound Eye

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
野外环境下实时准确获取河流流场信息及流速流量数据,一直是水利及航运工程、地球物理水力学研究等领域所困扰的难题。常规的旋桨/转子流速仪、声学法、雷达法和激光多普勒测速法等技术手段,仅能量测有限点流速、平均线流速或局部面流速的难以实时、准确重建野外原型观测中河流表面(水面)全场流速场。相对于常规技术手段,光学成像法是后发展起来的一种新型测量手段,即所谓的大尺度粒子成像测速(large-scale particle image velocimetry, LSPIV)方法。LSPIV测量原理直观,不接触水体,施测方便快捷、安全可靠 [1] - [7]。它以可见性的树枝树叶/杂草/杂物/冰块/人工播撒示踪粒子等水面漂浮杂物、或波纹/涟漪/泡漩/降雨形成的表面波等天然模式(natural tracer patterns)为观测对象,在忽略风的影响下,这些随水流一起运动的示踪物反映了河流表面二维流速场特征 [2] [3] [4] [5]。目前大多数应用是基于地面固定摄像头进行LSPIV测量的,即使是基于无人机的LSPIV测量 [8],但在万平方米以上的超大尺度水面全场流速场及断面流量测量应用中,面对水面反射/水下出射/大气散射等光线混叠扰动的河–气界面成像环境,以及复杂水流条件下,示踪物(目标)视觉隐微性特征显著,且目标运动矢量估计困难,致使光学成像观测(测量)的精度很不稳定,甚至导致测量数据不可信 [9] [10] [11]。针对上述的LSPIV方法存在的问题,本文提出一种模拟飞虫–蜻蜓复眼视觉的U-LSPIV测量系统设计模式,通过模拟蜻蜓复眼的功能优势,利用无人机搭载LSPIV测量仪器,能够实现超大尺度的水面流场测量和提升测量的精度及其稳定性。
2. 无人机搭载LSPIV仪器的测量系统(U-LSPIV系统)设计模式
2.1. U-LSPIV测量系统的组成
无人机搭载LSPIV仪器的测量系统(U-LSPIV系统)总体设计框图如图1 U-LSPIV测量系统总体设计框图所示。采用DJI大疆如风系列WIND8无人机,它是一款八轴八桨工业级防风无人机,无风环境下最大水平飞行速度:65 km/h,最大飞行海拔高度:2500 m,挂载的成像仪重量约5 kg。选用荷兰Xsens公司的MTI-AHRS产品、美国NS公司的专用芯片、国产云台等元部件集成,构成伺服自稳定平台和三轴云台,用于补偿机载成像仪与景物的相对抖动、保证机载成像仪稳定指向河面。
U-LSPIV测量系统包括机载仪器和地面车载仪器二部分。机载仪器包括:多波段–同步偏振仿复眼相机、成像数据高速处理系统、TD-LTE无线收发信机、及支撑相机的伺服自稳定机构和三轴云台。地面车载仪器包括:测控单元、便携式加固计算机和流场测算软件系统。测控单元由控制模块、遥测基站、现场环境感测模块(水位和风速风向的感测)、大容量数据高速存储系统、及蓄电池与交直流变换电源等构成。
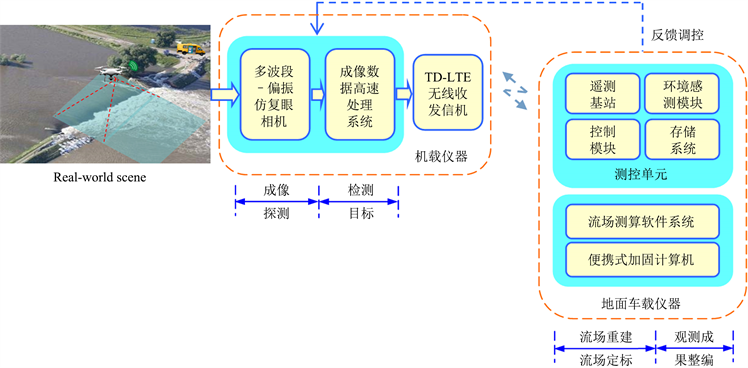
Figure 1. The overall design frame of U-LSPIV measurement system
图1. U-LSPIV测量系统总体设计框图
无人机机载仪器主要完成测量过程中“成像探测”和“检测目标”环节的任务。车载仪器主要完成“流场重建”、“流场定标”及“观测成果整编”环节的任务。机载的高速处理系统对大容量成像数据实时解译,形成小容量的水流示踪目标位移矢量图数据序列,经TD-LTE无线收发信机下传地面。地面车载遥测基站通过无线收发信机的下行高速链路,接收矢量图数据序列,并经上行链路传输测量过程反馈调控信息、及通信控制信令。无线收发信机工作频率2.5 GHz,数据传输率20 Mbit/s,通信距离1000 m。无人机飞行规划路线由地面操控,机载无线收发信机与地面车载遥测基站组成无线宽带数据传输系统,其工作过程见图2示意。
图3给出了TD-LTE收发信技术路线示意图。无线宽带数据传输系统采用符合国际电联4G移动通信标准(3GPP TS36.300)的TD-LTE物理层架构及核心关键技术,构建专用的遥测通信网络。地面车载仪器设备中配置遥测基站,由机载无线收发信机、环境感测点无线收发信机模块组成“空–地/车–点”无线宽带数据传输系统。系统工作中心频率为2.5 GHz (与商用蜂窝LTE系统间不产生干扰),遥测基站射频发射功率 ≤38 dBm,无人机或环境感测点上的发射功率 ≤23 dBm,通信距离3~4 Km;设计的“空–地”下行最大传输速率为100 Mbit/s,“地–空”上行、及“地/车–点”或“点–地/车”最大传输速率为20 Mbit/s,抗最大多普勒频移为810 Hz;采用TDD双工模式,MIMO (多输入多输出)天线阵工作模式配置为2 × 2或4 × 4空时发射分集或空间复接方案,天线阵采用单频微带偶极子全向辐射阵元构成。

Figure 2. The working process of the wireless broadband data transmission system
图2. 无线宽带数据传输系统工作过程示意
无人机载的TD-LTE无线收发信机将输入的矢量量测图(像)数据序列经编码处理并通过MIMO天线向遥测基站(地面)高速下行传输(空–地)。遥测基站经MIMO天线阵接收并处理后获得高质量的矢量图(像)数据序列。遥测基站与机载无线收发信机(地–空)的上行控制信令、地面反馈信号,及基站与环境感测点(1个雷达水位计、1个风速风向仪)的数据传输量较少,采用译码复杂度较低的卷积编码和MIMO空时发射分集或空时复接方案直接进行数据传输(20 Mbit/s),以节省功耗和硬件资源开销。
2.2. 施测作业方式
通过无人机搭载LSPIV仪器,实现大范围移动测量的施测作业方式,如图4示意,给出了举例说明。图4(a)示意了U-LSPIV测量系统依次在t1、t2、t3时间段进行了3次成像测量,用于漫滩溃坝的水面流场观测测量及超过200米宽大断面测流的水文抢测作业的情况,通过拼接(合成) 3次测量的数据,以实现超大尺度水面全场流速的测量。图4(b)示意了无人机沿河道向上游飞行,依次在t1、t2、t3、t4时间段进行了4次成像测量,实现万平方米以上的大范围流场拼接测量,用于河床泥沙输移、局部河段的河势研究等,以及用于获取多个断面准同步的水文测流资料。
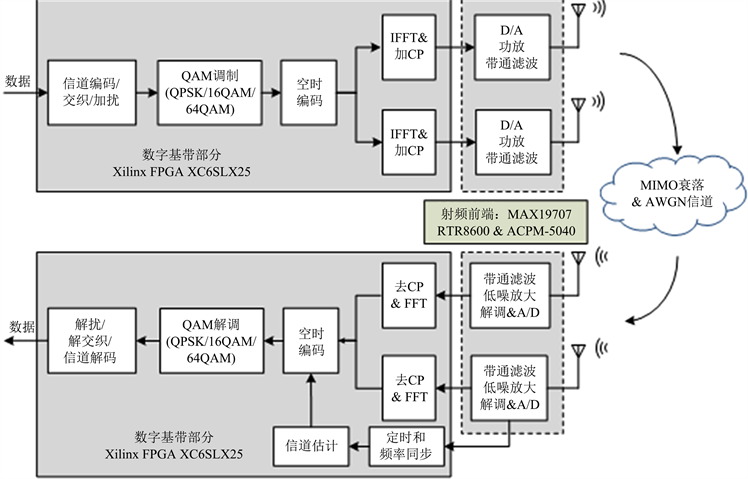
Figure 3. Design of the receiving and sending system based on TD-LTE
图3. TD-LTE收发信设计
 (a) 漫滩溃坝的原型观测及大断面拼接测流 (b) 超大尺度的观测及4个断面的准同步测流
(a) 漫滩溃坝的原型观测及大断面拼接测流 (b) 超大尺度的观测及4个断面的准同步测流
Figure 4. Schematic diagram of UAV test operation
图4. 施测作业示意图
2.3. U-LSPIV测量系统的主要功能模块
2.3.1. 多波段–偏振成像与仿复眼相机的光–机–电–算一体化
飞行昆虫–蜻蜓复眼视觉过程顺序由光学过程、化学过程和神经处理过程所构成,包含了视觉接收(感受)和视觉认知两大部分。复眼能够感受到光强、偏振等视觉信息,通过视网膜进入眼睛,光感受和信号转导发生在感杆中,感杆束的轴突输入到视叶神经节层,最后进入中央脑 [12] [13] [14]。借鉴蜻蜓复眼视觉系统的功能优势(诸如光谱–光强–偏振敏感性、生物适应性视觉滤波、杂乱背景下小目标运动检测的视叶神经计算机制等),以及轻量和低功率的视叶(optic lobe)神经计算范式,采用多波段–同步偏振成像和仿蜻蜓视觉计算的“光–机–电–算”一体化技术方法(该技术方法的实现见图5示意) [10] [15] [16] [17]。仿复眼相机“光–机”系统四通道采集的8幅图像送入“电–算”系统,经多路图像配准,合成为一路具有统一空间坐标系的“光谱–偏振态”水面场景图像,通过“虚拟小眼阵列(群)采样”,再经仿蜻蜓复眼视觉计算,然后输出水流示踪目标位移矢量图数据序列,模拟完成蜻蜓复眼成像和水流示踪目标运动检测。
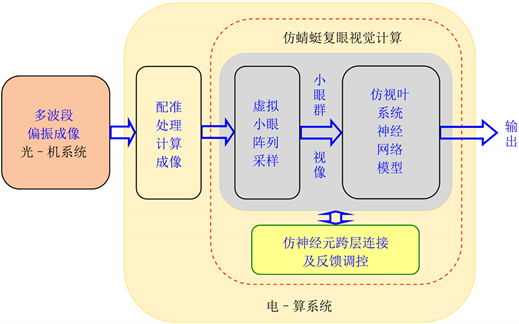
Figure 5. The realization of the integration of optical-mechanical-electric-computation technology simulating dragonfly vision computing
图5. 仿蜻蜓视觉计算的“光–机–电–算”一体化技术方法的实现
2.3.2. 水面二维时均流场重建
超大尺度的水面二维时均流场重建需要拼接多个单次成像的局部流场,为此设计的核心模块是“目标运动检测–瞬时流场修正–时均流场重建”的关联测算软件模块。首先基于“当前”统计模型预测目标移动,根据滤波器残差过程的变化,设置自适应阈值域滚动判定错误矢量,同时,接受关联测算计算过程在线分析模块的反馈信息,通过建立的基于非线性系统容积Kalman滤波的瞬时流场修正模型,适应性处理水面视域中混杂性目标错误矢量的修正;然后,基于仿蜻蜓复眼视觉计算的目标运动矢量光流估计,通过分解因数、计算容积点、协方差矩阵和互协方差矩阵、一步量测预测及更新状态等计算步骤,拼接单次成像的局部流场形成大范围(或大断面)的瞬时流场重建修正值。在此基础上完成超大尺度的时均流场重建。
2.3.3. 无人机空中定位与免像控的摄影测量
1) 无人机空中定位系统采用高精度的惯性测量(IMU)和差分GPS (DGPS)定位装置,釆样频率 >100 Hz,航偏角精度 >0.05度,俯仰角和翻滚角精度 >0.01度;定位采用载波相位差分技术(PPK),平面可达1~2 cm,高程达2~3 cm,三维总体精度优于5 cm;覆盖距离可达15~30 km。采用轻质、高强度的航空铝材料实现惯性测量IMU、机载GPS接收机、地面基站GPS接收机、相机和惯性稳定平台的刚性连接,使集成系统成为一个不存在传感器间相对运动的整体。
2) 变高水面物像尺度变换摄影测量建模是免像控的摄影测量的基础。以往基于近景摄影测量模型的流场定标方法,须人工布设野外像控点 [4] [8] - [18]。对于大范围流场观测,尤其高洪期山溪性河流水位暴涨暴落,选择布设像控点和控制指示点位的勘测误差困难,直接影响流场定标精度 [8] [10] - [19]。在对水位变化、相机拍摄倾斜姿态、畸变像差和“像点–光心–物点”共线约束关系做出综合解析基础上,建立免像控的变高水面物像尺度变换摄影测量模型,然后对模型的参数进行分步标定和网格化水面流速值,以及起点距的解算。建立的变高水面物像尺度变换摄影测量模型,为免像控的流场定标和误差控制提供了基础。
3. 结论
我们提出的U-LSPIV测量系统设计模式具有四方面的优点:1) 提出了一种采用DJI大疆如风系列WIND8无人机搭载LSPIV仪器的测量系统总体设计方案,并对无人机施测作业方式进行了优化,总体设计技术性能优于现有的基于无人机的LSPIV测量系统。2) 提出了多波段–偏振成像与仿复眼相机的“光–机–电–算”一体化技术方法,具有水面杂乱光线混叠扰动条件下水流示踪物(目标)流动矢量估计的高精度和高可靠性,以及轻量计算和低功率的优势。3) 提出了基于关联测算软件模块的水面二维时均流场重建方法,能够适应性处理水面视域中混杂性目标错误矢量的修正。4) 提出了一种改进的无人机空中定位与免像控摄影测量方法,解决了免像控的流场定标和野外环境下超大尺度测量误差控制难题。为适应于超大尺度河流表面全场流速场及断面流量测量的LSPIV可靠性应用,提供了有效的完整性解决方案。
文章引用
沈克永,杨 扬,徐梦溪,吴晓彬,陆云扬. 一种模拟飞虫视觉运动感知的U-LSPIV测量系统
A U-LSPIV Measurement System Simulating Visual Motion Perception of Flying Insects[J]. 计算机科学与应用, 2021, 11(07): 1888-1895. https://doi.org/10.12677/CSA.2021.117193
参考文献
- 1. Fujita, I., Muste, M. and Kruger, A. (1998) Large-Scale Particle Image Velocimetry for Flow Analysis in Hydraulic En-gineering Applications. Journal of Hydraulic Research, 36, 397-414. https://doi.org/10.1080/00221689809498626
- 2. Jodeau, M., Hauet, A., Paquier, A., Coz, J.L. and Dramais, G. (2008) Application and Evaluation of LS-PIV Technique for the Monitoring of River Surface Velocities in High Flow Conditions. Flow Measurement and Instrumentation, 19, 117-127. https://doi.org/10.1016/j.flowmeasinst.2007.11.004
- 3. Muste, M., Fujita, I. and Hauet, A. (2008) Large-Scale Particle Image Velocimetry for Measurements in Riverine Environments. Water Resources Research, 44, W00D19. https://doi.org/10.1029/2008WR006950
- 4. Bechle, A.J., Wu, C.H., Liu, W.C. and Kimura, N. (2012) Develop-ment and Application of an Automated River-Estuary Discharge Imaging System. Journal of Hydraulic Engineering, 138, 327-339. https://doi.org/10.1061/(ASCE)HY.1943-7900.0000521
- 5. Dobson, D.W., Holland, K.T. and Calantoni, J. (2014) Large-Scale Particle Image Velocimetry-Based Estimations of River Surface Velocity. Computers & Geosciences, 70, 35-43. https://doi.org/10.1016/j.cageo.2014.05.007
- 6. Tauro, F., Olivieri, G., Petroselli, A., Porfiri, M. and Grimaldi, S. (2016) Flow Monitoring with a Camera: A Case Study on a Flood Event in the Tiber River. Environmental Monitoring & Assessment, 188, 1-11. https://doi.org/10.1007/s10661-015-5082-5
- 7. Fujita, I., Notoya, Y., Tani, K. and Tateguchi, S. (2019) Efficient and Accurate Estimation of Water Surface Velocity in STIV. Environmental Fluid Mechanics, 19, 1363-1378. https://doi.org/10.1007/s10652-018-9651-3
- 8. Tauro, F., Pagano, C., Phamduy, P., Grimaldi, S., et al. (2015) Large-Scale Particle Image Velocimetry from an Unmanned Aerial Vehicle. IEEE/ASME Transactions on Mechatronics, 20, 3269-3275. https://doi.org/10.1109/TMECH.2015.2408112
- 9. Tauro, F., Porfiri, M. and Grimaldi, S. (2014) Orienting the Camera and Firing Lasers to Enhance Large Scale Particle Image Velocimetry for Streamflow Monitoring. Water Re-sources Research, 50, 7470-7483. https://doi.org/10.1002/2014WR015952
- 10. Xu, M.X., Wu, X.B., Zhang, Z. and Lu, Y.Y. (2021) Compound-Eye Imaging Imitation-Based Whole-Field Flow Measurement. Computers and Electrical Engineering, 92, Article ID: 107141. https://doi.org/10.1016/j.compeleceng.2021.107141
- 11. 赵浩源, 陈华, 刘维高, 黄凯霖, 刘炳义. 基于河流表面时空图像识别的测流方法[J]. 水资源研究, 2020, 9(1): 1-11.
- 12. Paulk, A., Millard, S.S. and van Swinderen, B. (2013) Vision in Drosophila: Seeing the World through a Model’s Eyes. Annual Review of Entomology, 58, 313-332. https://doi.org/10.1146/annurev-ento-120811-153715
- 13. Fabian, J.M., Dunbier, J.R., O’Carroll, D.C. and Wiederman, S.D. (2019) Properties of Predictive Gain Modulation in a Dragonfly Visual Neuron. Journal of Experi-mental Biology, 222, jeb207316. https://doi.org/10.1242/jeb.207316
- 14. Borst, A., Haag, J. and Mauss, A.S (2020) How Fly Neurons Compute the Direction of Visual Motion. Journal of Comparative Physiology A, 206, 109-124. https://doi.org/10.1007/s00359-019-01375-9
- 15. 徐梦溪, 王慧斌, 陈婷, 张振, 郑胜男. 三通道同步偏振成像及观测目标检测方法[J]. 仪器仪表学报, 2013, 34(11): 2408-2417.
- 16. Xu, M.X., Wang, X., Yan, X.J., Lv, G.F., Zheng, S.N. and Wang, H.B. (2013) Polarization Imaging Target Detection Method by Imitating Dragonfly Compound Eye LF-SF Mechanism. 2013 International Conference on Precision Mechanical Instruments and Measurement Tech-nology (ICPMIMT 2013), Shenyang, 25-26 May 2013, 2692-2694.
- 17. 徐梦溪, 施建强. 仿生复眼型多源监测数据融合与专题信息提取[J]. 水利信息化, 2021(1): 71-75.
- 18. Kim, Y., Muste, M., Hauet, A., Krajewski, W.F., Kruger, A. and Bradley, A. (2008) Stream Discharge Using Mobile Large-Scale Particle Image Velocimetry: A Proof of Concept. Water Resources Research, 44, W09502. https://doi.org/10.1029/2006WR005441
- 19. Wang, X., Shen, S.Q., Ning, C., Xu, M.X. and Yan, X.J. (2015) A Sparse Representation-Based Method for Infrared Dim Target Detection under Sea-Sky Background. Infrared Physics & Technology, 71, 347-355. https://doi.org/10.1016/j.infrared.2015.05.014