Modeling and Simulation
Vol.
12
No.
02
(
2023
), Article ID:
62652
,
15
pages
10.12677/MOS.2023.122106
一种欠驱动机械仿生半掌假手的研究与设计
赵晓阳1,2,石萍1,2*,喻洪流1,2
1上海理工大学康复工程与技术研究所,上海
2上海康复器械工程技术研究中心,上海
收稿日期:2023年1月13日;录用日期:2023年3月10日;发布日期:2023年3月17日

摘要
在涉及手部的截肢案例中,半掌截肢患者所占比例最大,但由于截肢类型的多样性以及产品商业化困难,近几十年对于半掌截肢假体的研究与设计相对较少,这造成很多半掌截肢患者找不到适合自己的假体产品。本文针对跨掌指关节四指截肢的患者,设计一款基于欠驱动原理的机械仿生假手。该假手手指采用七连杆欠驱动机构设计,通过Whiffle Tree机构实现指间力自适应分配,通过可复位式直线棘轮实现自锁与解锁。整个假手以手腕驱动,可实现自适应抓握。假手多数零件采用3D打印技术制造,具有顺应性好、可自锁、成本低、质量轻的特点。仿真和实验表明,该假手可成为相关患者的一个不错选择。
关键词
半掌假手,欠驱动连杆设计,腕驱动,Whiffle Tree机构,自锁设计

Research and Design of an Underactuated Mechanical Bionic Partial Hand Prosthesis
Xiaoyang Zhao1,2, Ping Shi1,2*, Hongliu Yu1,2
1Institute of Rehabilitation Engineering and Technology, University of Shanghai for Science and Technology, Shanghai
2Shanghai Engineering Research Center of Assistive Devices, Shanghai
Received: Jan. 13th, 2023; accepted: Mar. 10th, 2023; published: Mar. 17th, 2023

ABSTRACT
In hand amputation cases, partial hand amputation patients account for the largest proportion, however, due to the diversity of amputation types and the difficulty of product commercialization, research and design of partial hand amputation prosthesis are relatively few in recent decades, which has caused many patients with partial hand amputation cannot find suitable prosthesis products. In this paper, a mechanical bionic prosthetic hand based on underactuated principle is designed for the patients with four finger amputations across the metacarpophalangeal joint. The fingers of the prosthetic hand are designed with seven-link underactuated mechanism, which realizes the adaptive distribution of interfinger force through the Whiffle Tree mechanism and realizes the self-locking and unlocking through the resettable linear ratchet. The whole artificial hand is driven by the wrist, which can realize adaptive grip. Most parts of the prosthetic hand are manufactured by 3D printing technology, which has the characteristics of good compliance, self-locking, low cost and light weight. Simulations and experiments have shown that the prosthetic hand can be a good choice for relevant patients.
Keywords:Partial Hand Prosthesis, Underactuated Linkage Design, Wrist Drive, Whiffletree Mechanism, Self-Locking Design

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 背景
由于各类疾病和和意外事故,每年都有很多人不得不进行了手部的截肢 [1] 。根据相关研究,在韩国每年约有5000例与工作有关的手部截肢,占与工作有关的肢体截肢总数的93.7% [2] ;另外,约90%的上肢截肢病例为部分手部截肢 [3] 。
目前,针对手部截肢的解决方案有被动假手和主动假手 [3] 。相比于主要起装饰作用的被动假手,主动假手可以运动,能够更好地满足患者生活和工作的基本动作要求。主动假手根据动力来源可分为电动假手和身体驱动型假手,电动假手动力来源于电池,一般通过肌电信号控制手指的开合等运动 [4] [5] ;身体驱动型假手动力来源于患者身体,驱动部位主要包括肩部、腕部和手指残端。相比而言,身体驱动型假手由于不需要电池和控制系统大大简化了整体结构,具有成本低和可靠性高的优点 [6] [7] [8] [9] ,可为经济状况较差的患者提供更好的选择。
国内外的相关假肢公司和科研机构都开发有各自的身体驱动型假手,其中比较有代表性的包括Naked Prosthetics Incorporated公司的Naked Finger,Partial Hand Solutions LLC公司的M-Finger,Point Designs公司的系列产品,以及上海交通大学的the JTP hand [10] 等。
上述假手都具有各自的优点,但并没有同时兼顾运动仿生性、抓握力自适应性、指间力自适应分配功能和自锁功能,具有一定的限制。本文针对跨掌指关节四指截肢的患者,设计一款基于欠驱动原理的机械仿生假手。该假手通过七连杆欠驱动机构实现手指的自适应抓握,通过Whiffle Tree机构实现指间力的自适应分配,通过可复位式直线棘轮实现自锁与解锁。仿真和实验表明,该假手可成为相关患者的一个可靠选择。
2. 设计目标
本假手的设计对象为跨掌指关节四指截肢的患者,在设计中我们主要考虑了以下目标:
l 手指为三指节设计,能够实现预抓握和自适应抓握,且具有足够的抓握力保证抓握可靠性;
l 四指之间的力可以实现自适应分配;
l 患者单手就可以完成自锁与解锁,抓握过程中手腕不需要持续屈曲发力;
l 整个假手的重量尽可能低,穿戴舒适且方便,患者个人即可完成穿戴。
3. 设计细节
基于以上设计目标,我们首先对患者佩戴假手的抓握流程进行了分析,最终确定了如表1所示的抓握方案。该抓握方案的核心思想是患者手腕不需要持续屈曲发力来实现持续抓握并可以在不需要健侧手的帮助下即可完成自动解锁。

Table 1. Design of the prosthetic hand grip scheme
表1. 假手抓握方案设计
本假手采用了模块化设计的思想,包括5个部分:手指、指间力自适应分配装置、自锁装置、掌部基座和前臂基座。其中,手指结构采用欠驱动七连杆结构,指间力自适应分配装置采用Whiffle Tree机构,自锁装置采用可复位式直线棘轮机构。图1是实物图。
 (a) 带壳体穿戴背面图 (b) 不带壳体穿戴背面图
(a) 带壳体穿戴背面图 (b) 不带壳体穿戴背面图
Figure 1. The prosthetic hand
图1. 假手实物图
本节包括以下几个部分:3.1主要介绍了手指设计和优化的过程和方法;3.2主要介绍了用于指间力自适应分配的Whiffle Tree机构;3.3主要介绍了可以在最大行程处自动解锁并复位的直线棘轮机构。
3.1. 手指设计
3.1.1. 机构设计和抓握原理
无源腕屈机械假手的动力来源是手腕的屈曲动作,对于单根手指来说也就意味着驱动数目唯一,为了能够实现手指的自适应抓握功能和预抓握功能,欠驱动机构是一个不错的选择。
欠驱动是指机构的致动器数量小于该机构的自由度数量。由于其具有结构简单,可以实现形状自适应抓握等优点,被广泛应用在假手设计中 [11] 。欠驱动主要有连杆结构和绳索—肌腱两种方式,相比来说,连杆结构具有末端输出力大、负载能力强、结构紧凑不易变形等优点。本文的手指结构采用欠驱动七连杆设计,如图2所示。
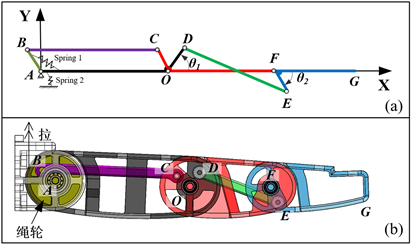 (a) 机构简图 (b) 模型图
(a) 机构简图 (b) 模型图
Figure 2. The structure of underactuated seven-link finger
图2. 欠驱动七连杆手指结构图
关节A、O、F分别对应掌指关节(MCP)、近端指间关节(PIP)和远端指间关节(DIP);AO、OF和FG分别对应近指节、中指节和远指节;A是固定旋转中心,AB是驱动连杆,在设计中演化为绳轮,将连杆传动和绳索传动结合起来;BC是传动杆件,将运动和力从AB杆传递到CO杆。弹簧1作用在AB和AO间,弹簧2作用在AO和机架间。弹簧1和弹簧2会进行预加载,以防止中指节和远指节由于自身重量和惯性效应而晃动。
预抓握运动是指假手手指在接触物体前的预成形 [12] [13] 。预抓握运动应尽可能和人类手指自然抓握运动相似,是假手仿生性的一个重要表现形式,本文设计的欠驱手指结构即具有预抓握特性。根据在不同的抓握阶段欠驱动仿人手指机构表现出不同的机制状态,我们将整个抓握过程分为两个阶段,如图3所示。
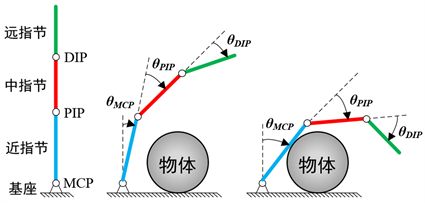
Figure 3. Grasping mode of the prosthetic hand
图3. 假手抓握过程图
第一阶段:手指还未接触到被抓物体,此时所有指节都不受外力影响,在两个弹簧的作用下,欠驱动仿人假手指机构进行预抓握运动。
第二阶段:当近指节接触到被抓物体,近指节固定,中指节和远指节继续运动完成对物体的包络。
3.1.2. 运动学分析
第一阶段:预抓握运动。此时近指节还未接触到被抓物体,整个机构是一个自由度为2的七连杆机构,如图4所示。预抓握对于欠驱动仿人假手是重要的,可以减少“弹射”现象的发生 [12] [14] ,提高抓握成功率。通过选择合适的弹簧刚度,可以得到合适的运动轨迹,弹力的大小还影响着抓握力的大小。此外,弹簧还有给系统提供回弹力的作用。
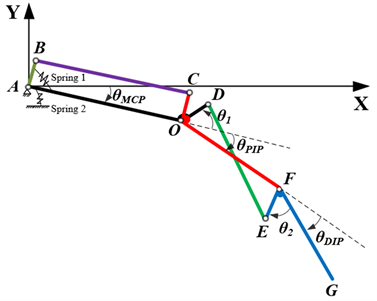
Figure 4. Schematic diagram of the finger in the pre-griping stage
图4. 预抓握阶段手指机构简图
第二阶段:包络运动。当近指节接触到被抓物体,近指节固定,整个机构化为一个自由度为1的六连杆机构,如图5所示。该六杆机构可以看作两个四连杆机构的耦合,即四连杆ABCO和四连杆ODEF。其中四连杆ABCO主要是完成力的传递,四连杆ODEF代表中指节和远指节的运动。
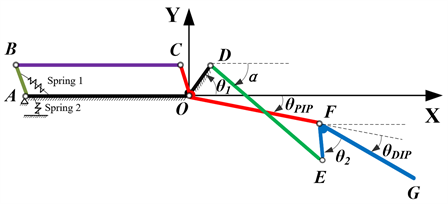
Figure 5. Schematic diagram of the finger in the envelope stage
图5. 包络阶段手指机构简图
为了方便计算,设计四连杆ABCO为一个平行四边形机构,主要考虑它的传动性能。我们知道,四连杆机构的传动性能和压力角的大小有关,压力角越小,传动性能越好。平行四边形机构传动性能较好的正是OC杆在竖直状态下对称的左右两边。
对于四连杆ODEF,我们取近指节接触被抓物体的情况进行分析。此时,以点O为原点,杆OA为X轴建立笛卡尔坐标系,可得矢量方程:
(1)
写成分量形式:
(2)
消去 可得:
(3)
我们希望初始状态手指保持竖直,近端指间关节和远端指节关节转角为0,即AO、OF和FG水平共线,参考图2(a),此时可以求得杆DE的长度。
在ΔODF中可得:
(4)
(5)
在ΔEDF中可得:
(6)
(7)
3.1.3. 尺寸设计与优化
假手手指的尺寸应和患者的健侧手一样。由于没有合适的患者,在这里我们参考了《人手指的宽度及各节长度的测量》中的统计结果 [15] ,确定各手指的指节长度如表2所示。另外,根据生理学相关知识,确定掌指关节、近端指间关节、远端指间关节的活动范围分别为90˚、105˚、80˚。
Table 2. Design of knuckle length for four fingers
表2. 四指指节长度设计
根据人体生理学的知识,手指的近端指间关节和远端指间关节存在线性耦合关系,即线性系数为105/80。由于假手空间尺寸的限制,我们设计杆AB、OC、OD、EF的长度均为5,至此还有杆DE的长度和∠COF、θ1、θ2没有被确定。
在初始状态,手指保持竖直,即AO、OF和FG水平共线。根据上述分析,很容易可以得出OC杆的运动范围,即与X轴正向夹角为37.5˚到142.5˚,也就是说∠COF角度为142.5˚。此外,通过式(7)可以得到杆DE的长度,该长度和 、 有关,假设 、 确定,杆DE的长度也就是唯一的,此时四连杆ODEF也是唯一的,也就是说 和 的关系是确定的。
利用MATLAB程序通过式(3)可以得到中指节和远指节转过角度间的关系。为了减小计算量,我们假定 、 的取值范围都是45~70。最终,四指中指节和远指节转角关系仿真结果如图6所示,此时四指 、 的值和杆DE的长度如表3所示。可以看到,该优化方法具有通用性,很方便即可得到患者的定制化结果。
Table 3. The optimization results of θ1, θ2 and lDE for four fingers
表3. 四指θ1、θ2和lDE优化结果

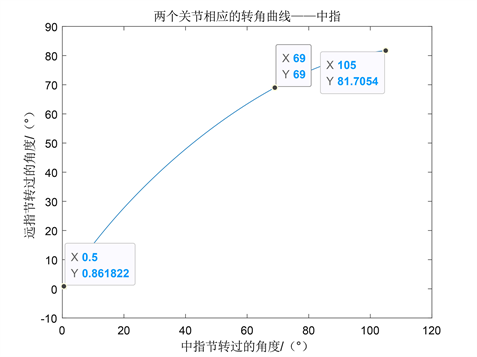
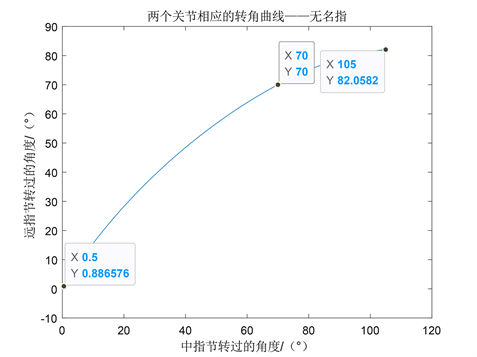
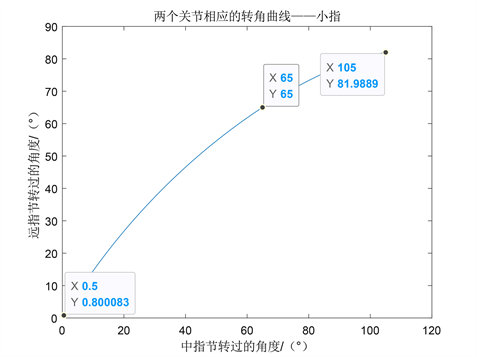
Figure 6. Simulation results of angle relationship between middle phalanx and distal phalanx of four fingers
图6. 四指中指节和远指节转角关系仿真图
3.1.4. 抓握模型分析和仿真
本假手最主要的功能是帮助四指截肢者完成抓握需求,我们以单根手指为例建立抓握的力学模型。由于该七连杆结构的自由度是2,在抓握过程中并不能实现3指节的完全包络,即每次抓握会仅有两个指节接触物体,这可以分为两种情况:近指节和远指节接触物体、近指节和中指节接触物体。两种抓握模型如图7所示。
为了验证两种情况下假手的抓握效果,在ADAMS/VIEW中建立了如图8所示的模型。其中,倾斜45˚的挡板模拟拇指,被抓物体为直径30 mm的刚性圆柱体。仿真参数设置如下:两个扭簧的的刚度系数取0.5 N*mm/˚,阻尼系数取0.5 N·s/mm;各指节与圆柱体的接触为弹性碰撞,刚度系数取10,000 N/mm,阻尼系数取100 N·s/mm,力指数取2.2;驱动件转轮(杆AB)的转动转速取15˚/s。
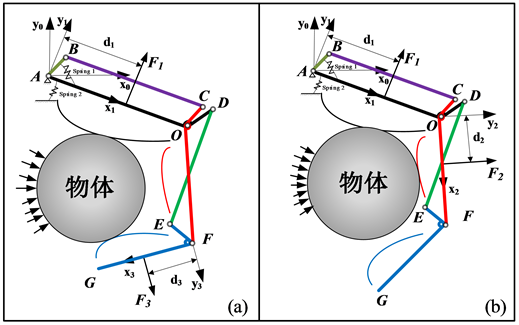 (a) 近指节和远指节接触物体 (b) 近指节和中指节接触物体
(a) 近指节和远指节接触物体 (b) 近指节和中指节接触物体
Figure 7. The Grasping mode of single finger
图7. 单根手指抓握模型图
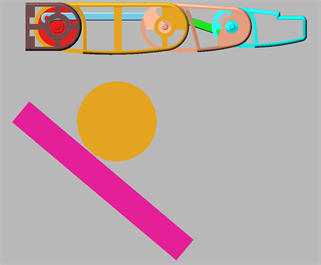
Figure 8. The Grasping mode in ADAMS
图8. ADAMS抓握模型图
设置仿真时间5 s,步数为500步,开始仿真。抓握仿真过程如图9所示,整个过程可以分为4个阶段:第一阶段,近指节未接触到物体,手指进行预抓握运动;第二阶段,近指节接触物体,中指节继续运动并接触物体;第三阶段,物体在近指节和中指节的挤压下向上运动,掌指关节运动角度变小,近端指间关节和远端指间关节运动角度则继续变大;第四阶段,中指节和物体分离,而远指节和物体接触,并开始挤压物体。
仿真结果如图10所示。第一阶段:驱动转角、关节转角、驱动扭矩和扭簧扭矩都平缓增大;第二阶段:驱动转角和关节转角平缓增大,驱动扭矩、扭簧扭矩以及拇指、近指节和中指节的接触力由于碰撞产生一定的波动;第三阶段:近端指间关节和远端指间关节的角度依旧增大,且速度略有增加,但掌指关节的角度却略微变小,驱动扭矩、扭簧一的扭矩和三指节的接触力都平缓增大,扭簧二的扭矩却略微变小;第四阶段:驱动扭矩出现较大突变和波动,之后的增大速度也迅速增加,扭簧一和扭簧二的扭矩则分别向上和向下突变,并急剧变化,中指节接触力减小为0,拇指、近指节、远指节的接触力迅速增大。
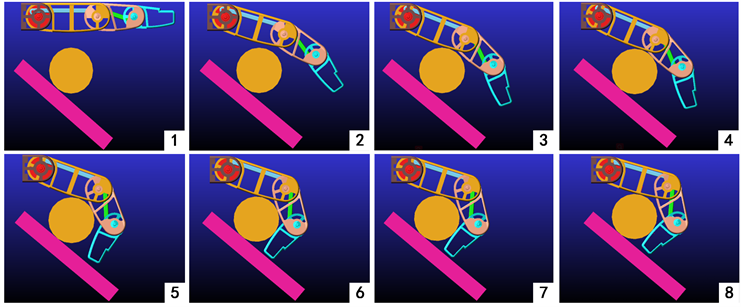
Figure 9. The process of grip simulation
图9. 抓握仿真过程图
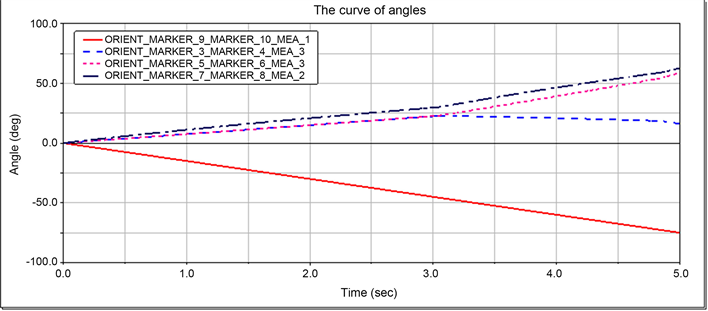 (a) 驱动转角和三个关节角度变化曲
(a) 驱动转角和三个关节角度变化曲
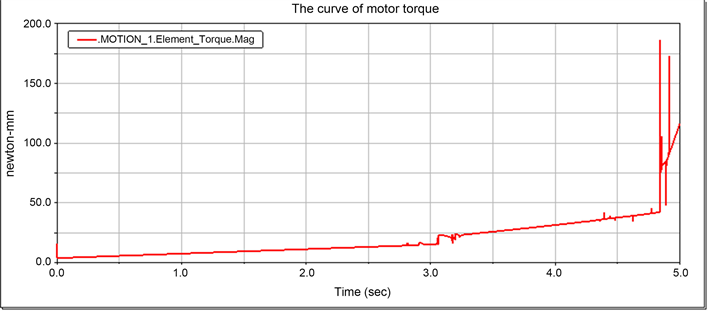 (b) 驱动扭矩变化曲线
(b) 驱动扭矩变化曲线
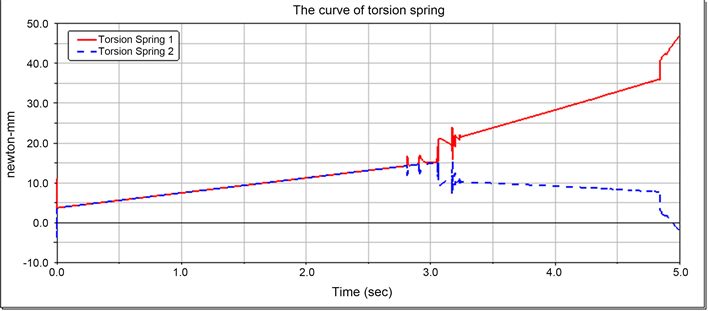 (c) 扭簧扭矩变化曲线
(c) 扭簧扭矩变化曲线
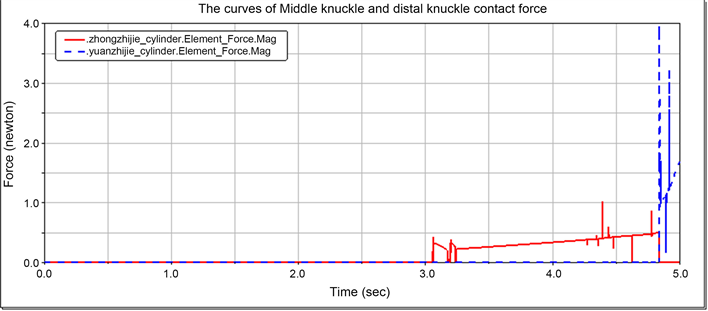
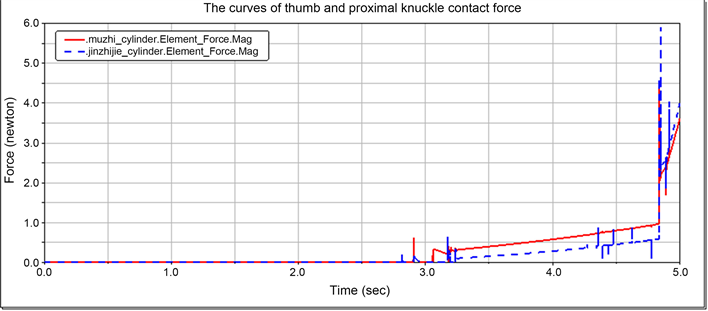 (d) 指节接触力变化曲线
(d) 指节接触力变化曲线
Figure 10. The result of grip simulation
图10. 抓握仿真结果图
我们可以得到如下结论:第一,当近指节和中指节接触物体,手指抓握力偏小,所需的驱动力也不大;当近指节和远指节接触物体,手指抓握力更大,但所需的驱动力会急剧增大;第二,假手所能提供的最大抓握力和弹簧一的扭矩有关,在增加驱动力矩去挤压物体的过程中,掌指关节角度会变小,扭簧一的扭转角度会变大,当掌指关节角度减小到0,此时即为假手所能提供的最大抓握力。
3.2. Whiffle Tree机构
Whiffle Tree机构是一个在假手上很常用的机构,它的本质是把一个输入自适应地分配到多个输出,应用到假手上即可以实现指间力的自适应平衡 [9] [10] [16] [17] 。本假手以腕力作为惟一的动力源,同时驱动四根手指,采用Whiffle Tree机构是一个明智且方便的选择。本文设计的Whiffle Tree机构原理图和实物图如图11所示。
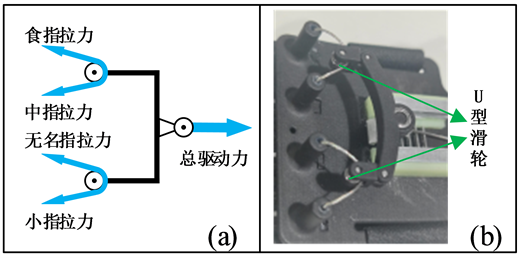 (a) 原理图 (b) 实物图
(a) 原理图 (b) 实物图
Figure 11. Whiffle Tree mechanism
图11. Whiffle Tree机构
3.3. 自锁机构
对一个无源的假手来说,自锁功能的有无和截肢的程度有关 [10] 。缺少远指节和中指节是不需要自锁的,这类手指结构设计往往采用交叉四连杆结构,由近指节残端去提供动力;但是当整个手指被截肢而由腕部提供动力时,自锁功能就显得尤为重要了。自锁功能可以使手指在停在特定位置以保持抓握状态,而不需要持续的动力输入,这直接影响假手的使用效率。
本文采用可复位式直线棘轮自锁方案,通过机械限位的方式在最大行程处实现解锁。具体结构图和实物图如图12所示。初始状态下,棘爪由于机械限位相对于滑块只能单向转动,当患者屈腕向后拉动滑块,棘爪会在挡杆的作用下偏转一定角度,但是当其越过挡杆,就会在扭簧1的作用下复位。当滑块运动到最大行程处,棘爪会在啮合限位的机械作用转到最大角度,并与挡架啮合,由于扭簧2的作用,挡架有向下运动的趋势,这保证了啮合的可靠性。当棘爪与挡架啮合后,滑块会在手指中扭簧的作用下复位,挡架会在初始位置处被分离限位反转,棘爪脱离啮合重新回到初始状态。
本机构可进行6次锁止,这和滑块最大行程以及零件设计尺寸有关。该机构实现了整个假手装置的自锁、解锁与复位,并且患者仅仅需要进行屈腕动作,操作简单可靠。
4. 实验设计
假手的大部分结构由尼龙3D打印制作,滑轨基座采用了树脂材料,关键受力构件以及滑轨等结构采用了铝合金制造,关键转动副都安装滚动轴承以减小摩擦。整个假手重约130 g,大约是人手四分之一的重量。
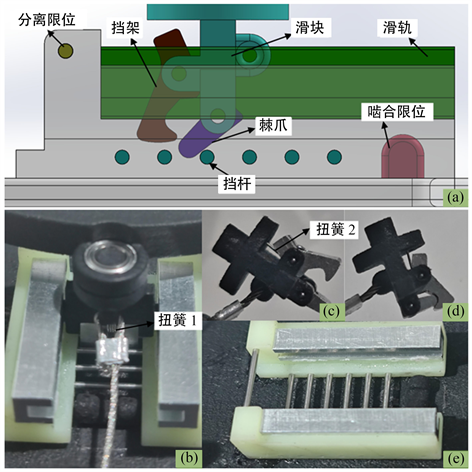 (a) 整体结构图 (b) 整体实物图 (c) 棘爪和挡架分离实物图 (d) 棘爪和挡架啮合实物图 (e) 滑轨、挡架以及机械限位实物图
(a) 整体结构图 (b) 整体实物图 (c) 棘爪和挡架分离实物图 (d) 棘爪和挡架啮合实物图 (e) 滑轨、挡架以及机械限位实物图
Figure 12. Resettable linear ratchet mechanism
图12. 可复位式直线棘轮机构
为了验证假手的特点和功能,设计了以下3个实验:
实验一验证假手的运动特性,在不抓握物体的情况下,通过腕力屈曲四指,如图13所示。可以看到腕部大约弯曲40˚左右,手指完全屈曲,在这个过程中,四指表现出预抓握特性,具有良好的仿生性。此外,理论上四指应是完全同步运动,但在实际中,由于扭簧刚度、安装精度和摩擦等原因四指有些许的差别。
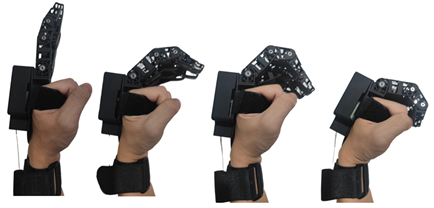
Figure 13. The prosthetic hand has good bionic performance
图13. 假手具有良好的仿生性
实验二验证假手的抓握功能,主要关注手指的形状自适应功能和指间力的自适应分配功能。为此,我们抓握了两个物体,网球和未开封的饮料,如图14所示。可以看到,假手四指对两者都完成了自适应包络,但包络网球的四指运动状态各不相同,包络饮料的四指运动状态大致相当。这说明,假手具有良好的手指形状自适应功能和指间力自适应分配功能,且对球体和圆柱体具有良好的抓握特性,可以满足设计要求。
实验三验证假手的自锁功能,在不抓握物体的情况下,相同的手指运动状态对比手腕的活动度,如图15所示。结果显示,在完成抓握动作后,手腕可以不再发力,手指依旧可以保持抓握状态。


Figure 14. The prosthetic hand allows for an adaptive grip
图14. 假手可以进行自适应抓握
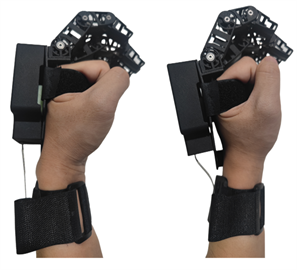
Figure 15. The prosthetic hand has a self-locking function
图15. 假手具有自锁功能
5. 结论与展望
本文针对跨掌指关节四指截肢的患者,介绍了一款基于欠驱动原理的机械仿生假手。该假手手指采用七连杆欠驱动机构设计,通过Whiffle Tree机构实现了指间力的自适应分配,通过可复位式直线棘轮实现了整个装置的自锁与解锁。整个假手装置以手腕驱动,可实现人手最重要的抓握功能。相关仿真和实验表明,该假手可成为相关患者的一个不错选择。
虽然该假手整体上可满足相关功能,但在一些细节问题上仍有改进空间。首先是手指外形上考虑选择扫描的方法以达到更加拟人的效果,其次是结构上进行优化以减小不对称应力,最后是进行更高程度的模块化设计以方便安装和使用中的维护。
文章引用
赵晓阳,石 萍,喻洪流. 一种欠驱动机械仿生半掌假手的研究与设计
Research and Design of an Underactuated Mechanical Bionic Partial Hand Prosthesis[J]. 建模与仿真, 2023, 12(02): 1117-1131. https://doi.org/10.12677/MOS.2023.122106
参考文献
- 1. Boulas, J.H. (1998) Amputations of the Fingers and Hand: Indications for Replantation. Journal of the American Academy of Orthopaedic Surgeons, 6, 100-105. https://doi.org/10.5435/00124635-199803000-00004
- 2. Lee, M.-Y., Lee, S.-H., Leigh, J.-H., et al. (2022) Functional Improvement by Body-Powered 3D-Printed Prosthesis in Patients with Finger Amputation: Two Case Reports. Medicine, 101, e29182. https://doi.org/10.1097/MD.0000000000029182
- 3. Imbinto, I., Peccia, C., Controzzi, M., et al. (2016) Treatment of the Partial Hand Amputation: An Engineering Perspective. IEEE Reviews in Biomedical Engineering, 9, 32-48. https://doi.org/10.1109/RBME.2016.2523799
- 4. Zhou, H., Tawk, C. and Alici, G. (2022) A 3D Printed Soft Robotic Hand with Embedded Soft Sensors for Direct Transition Between Hand Gestures and Improved Grasping Quality and Diversity. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 30, 550-558. https://doi.org/10.1109/TNSRE.2022.3156116
- 5. Imbinto, I., Montagnani, F., Bacchereti, M., et al. (2018) The S-Finger: A Synergetic Externally Powered Digit with Tactile Sensing and Feedback. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 26, 1264-1271. https://doi.org/10.1109/TNSRE.2018.2829183
- 6. Graham, E.M., Hendrycks, R., Baschuk, C.M., et al. (2021) Restor-ing Form and Function to the Partial Hand Amputee: Prosthetic Options from the Fingertip to the Palm. Hand Clinics, 37, 167-187. https://doi.org/10.1016/j.hcl.2020.09.013
- 7. Young, K.J., Pierce, J.E. and Zuniga, J.M. (2019) Assessment of Body-Powered 3d Printed Partial Finger Prostheses: A Case Study. 3D Printing in Medicine, 5, Article No. 7. https://doi.org/10.1186/s41205-019-0044-0
- 8. Alturkistani R, A., K., Devasahayam, S., et al. (2020) Affordable Passive 3D-Printed Prosthesis for Persons with Partial Hand Amputation. Prosthetics & Orthotics International, 44, 92-98. https://doi.org/10.1177/0309364620905220
- 9. Cuellar, J.S., Smit, G., Breedveld, P., Zadpoor, A.A. and Plettenburg, D. (2019) Functional Evaluation of a Non-Assembly 3d-Printed Hand Prosthesis. Proceedings of the Institution of Mechanical En-gineers, Part H: Journal of Engineering in Medicine, 233, 1122-1131. https://doi.org/10.1177/0954411919874523
- 10. Xu, K., Liu, H., Zhang, Z. and Zhu, X. (2018) Wrist-Powered Partial Hand Prosthesis Using a Continuum Whiffle Tree Mechanism: A Case Study. IEEE Transactions on Neural Systems and Re-habilitation Engineering, 26, 609-618. https://doi.org/10.1109/TNSRE.2018.2800162
- 11. Sun, L., Zhang, H., Lin, H. and Pan, W. (2022) Design and Research of an Underactuated Manipulator Based on the Metamorphic Mechanism. Sensors, 22, Article No. 4766. https://doi.org/10.3390/s22134766
- 12. Kashef, S.R., Amini, S. and Akbarzadeh, A. (2020) Robotic Hand: A Review on Linkage-Driven Finger Mechanisms of Prosthetic Hands and Evaluation of the Performance Criteria. Mechanism and Machine Theory, 145, Article ID: 103677. https://doi.org/10.1016/j.mechmachtheory.2019.103677
- 13. Yoon, D., Lee, G., Lee, S. and Choi, Y. (2016) Underactuated Finger Mechanism for Natural Motion and Self-Adaptive Grasping Towards Bionic Partial Hand. 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26-29 June 2016, 548-553.
- 14. Difonzo, E., Zappatore, G., Mantriota, G. and Reina, G. (2020) Advances in Finger and Partial Hand Prosthetic Mechanisms. Robotics, 9, Article No. 80. https://doi.org/10.3390/robotics9040080
- 15. 霍胜军, 范松青, 赵臣银. 人手指的宽度及各节长度的测量[J]. 解剖科学进展, 2003, 9(4): 326-328.
- 16. Baril, M., Laliberté, T., Gosselin, C. and Routhier, F. (2013) On the Design of a Mechanically Programmable Underactuated Anthropomorphic Prosthetic Gripper. Journal of Mechanical Design, 135, Article ID: 121008. https://doi.org/10.1115/1.4025493
- 17. Cuellar, J.S., Smit, G., Zadpoor, A.A. and Breedveld, P. (2018) Ten Guidelines for the Design of Non-Assembly Mechanisms: The Case of 3D-Printed Prosthetic Hands. Proceedings of the Institution of Me-chanical Engineers, Part H: Journal of Engineering in Medicine, 232, 962-971. https://doi.org/10.1177/0954411918794734
NOTES
*通讯作者。