Open Journal of Fisheries Research
Vol.
06
No.
04
(
2019
), Article ID:
33402
,
10
pages
10.12677/OJFR.2019.64024
Mariculture Areas Recognition Based on UAV Remote Sensing
Peng Lian, Yang Liu*, Xiaoqing He, Youfu Jing, Congying Huang, Zheyi Dong, Xuhui Song, Ankang Xu
Department of Fisheries, College of Fisheries, Ocean University of China, Qingdao Shandong

Received: Nov. 20th, 2019; accepted: Dec. 4th, 2019; published: Dec. 11th, 2019

ABSTRACT
UAV remote sensing technology has become an increasingly important tool for GIS to obtain data. It is widely applied in various fields such as planning and design, risk assessment and overall optimization, with high accuracy, strong flexibility and rapid extraction of multi-dimensional features. In this paper, UAV remote sensing and image recognition technology based on machine learning are used to model mariculture areas along the coast of Lingshan Island in Qingdao, Shandong and to identify the marine aquaculture areas and coastal residents. In addition, the method based on support vector machine is used to process spatial information of each functional area along the coast and consequently get the parameters of each feature element of the area. In this paper, based on the supervised classification, 35% of sample pixels are used as training set to test the robustness of the model simulation effect under different spectral details and spatial details. The results show that: for small sample size and the requirement of fast ground object identification and analysis, SVM shows a high accuracy (up to 76.56%), but for small samples, the model effect is greatly affected by the training set. In the future, about field investigation and verification of results, combination of big data could improve the object identification accuracy.
Keywords:UAV Remote Sensing, Machine Learning, Mariculture Areas, SVM, Supervised Classification
基于无人机遥感的海洋养殖区识别研究
连鹏,刘阳*,何晓晴,景有甫,黄聪颖,董浙燚,宋旭辉,徐安康
中国海洋大学水产学院渔业系,山东 青岛

收稿日期:2019年11月20日;录用日期:2019年12月4日;发布日期:2019年12月11日

摘 要
无人机遥感技术已日趋成为地理信息系统获取数据的重要工具,它以高精度、高灵活性和快速提取多维特征的优点而广泛应用于规划设计、风险评估和整体优化等领域中。本文利用无人机遥感以及基于机器学习的图像识别技术对山东省青岛市灵山岛海洋养殖区域及其沿海居民区进行了地物识别。同时,使用基于支持向量机(SVM)的方法对沿海各个功能区域进行了目标空间信息计算并得到了该区域的各项特征要素参数。本文基于监督分类,使用35%的样本像素作为训练集,测试了在不同光谱和空间条件下模型模拟效果的稳健性。结果表明:对于小样本容量,快速进行地物识别分析的要求下,SVM表现出较高的判准性(可达76.56%),但对小样品而言,模型效果受训练集的影响较大。对于现场调查和结果验证,将来通过大数据可以进一步提高对物体识别的精度。
关键词 :无人机遥感,机器学习,海洋养殖区,支持向量机,监督分类

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 背景介绍
无人机(UAV)作为一种现代化的监测工具,在获取空间数据方面具有分辨率高、机动性好、效率高等特点 [1] [2] [3] [4],与传统的监测方式相比,其便捷性更好,也更有时效性,应用范围也更广。目前无人机的主流应用领域为建筑行业、地形测绘、农林保护、水利监测等 [5] [6] [7],利用轻型无人机采集现场数据,经影像拼接、目标解译和相关资料叠加分析,能快速获取空间数据信息 [8] [9] [10]。
而建立无人机低空遥感海洋监测系统能实时监测海洋,有助于提高海洋机动监测和防灾减灾应急监测能力 [11] [12] [13],为海洋防灾减灾工作的进行提供便利 [14] [15] [16],更高效地进行海洋测绘,比如进行海冰监测、赤潮分析、海洋动力遥感观测等测绘工作 [17] [18] [19] [20]。同时可以对不同季节沿海养殖区进行监测 [21] [22] [23] [24],实时掌握海洋渔业发展动态,比如,目前大多数海洋牧场的监测仍然以人工监测为主,如果采用无人机监测将增强业主对养殖区的监测管理力度 [25] [26] [27] [28]。同时由于它快速响应的特性 [29] [30] [31],可以用来评估台风等自然灾害对渔业造成的影响。因此,本文就无人机以海洋养殖区的识别为应用实例,来探讨关于无人机在海洋发展中的应用及前景 [32]。
2. 材料与方法
2.1. 无人机及研究区域
根据养殖区域及环境因素,我们选择灵山岛为海洋养殖区识别的区域。灵山岛地处黄岛外海南部,距离大陆10海里左右,于2009年被批准为国家级海珍品种质保护区,附近水域水质优良,所产海参个体大、肉质厚,口感润滑筋道,比大棚养殖和养殖池养殖海参的品质更好,年产量达到200吨。2012年8月31日灵山岛海参获得国家地理标志产品认证。2014年4月,青岛西海岸灵山岛获批建立国家级海洋公园。灵山岛常住人口2700余人。有12个自然村,总面积7.66平方公里(见图1)。
2019年9月8日中午使用DJI Mavic 2以及DJI Phantom 4 Pro无人机沿垂直岸线路径拍摄灵山岛部分海陆界面12张影像,间隔拍摄,每张距离控制在15米左右,飞行高度50米(见图2)。相机型号为1LD-20c,CCD大小为0.0034375 mm,采用1英寸2000万像素CMOS传感器,感光度100~12800,具有暗部细节优势。相机参数采用哈苏自然色彩解决方案(HNCS),采用L-RGB色彩空间,在扩展色彩空间内加入了LAB颜色数据,对于传统的RGB和CMYK两种色彩模式有较大的包容度优势。

Figure 1. Location of Lingshan Island
图1. 灵山岛位置图

Figure 2. DJI Phantom 4 Pro
图2. 大疆精灵4 Pro
2.2. 无人机遥感技术
无人机遥感技术运用了遥感影像和识别分类的技术,遥感影像通过地物的光谱信息及地物的空间信息来表示不同地物;识别分类利用计算机对遥感影像中各类地物的光谱信息和空间信息进行分析,选择特征,实现遥感影像的分类。本次研究根据灵山岛轮廓特征,采取垂直岸线飞行。
2.3. 图像处理和分析
通过MATLAB对图像进行真彩信息增强后,建立文件关联。通过图像重合度分析对十二张图片进行重构建模拼接。基于ArcGIS10.6创建正射产品。首先在6个并行实例之间分配运算,然后进行DEM提供带有预配置的流程模块,以便从影像集合生成高程产品。可创建数字地形模型(DTM)或数字表面模型(DSM),结果可用于正射正影像集合。最后栅格函数,卷积差值归正地物,拉伸变换即可。过程中相机可能存在畸变,此时镜头变形参数需要使用Brown-Conrady畸变模型重新定义畸变系数(见图3)。
其中将12个影像进行校正,共计8528个连接点,解决方案共3658个,平均重新投影误为0.38像素,地面分辨率为0.043米/像素。各个像素平均重新投影误差如下表(见表1)。

Figure 3. Flow chart of orthophoto products
图3. 正射产品生成流程图

Table 1. Projection error of connection points
表1. 连接点投影误差
2.4. 图像分类技术
支持向量机(support vector machine,简称SVM),它是一种二分类模型 [33] [34] [35],模型定义为特征空间上的间隔最大的线性分类器,通过间隔最大化,最终可转化为一个凸二次规划问题的求解 [36]。本研究通过机器学习中SVM方法对无人机遥感图像进行地物识别。
SVM方法一般分为前期准备–训练–测试三个部分。
前期的准备首先需要确立分类器的个数,然后进行图像库建立、ROI提取、ROI预处理、特征向量确定、特征提取、特征向量的归一化、核的选定等一系列准备工作,具体工作流程内容如下表(见表2):
Table 2. Preparation workflow
表2. 准备工作流程表
接下来对选定的样本进行训练,训练就是根据选定的核函数对样本集的所有特征向量进行计算,构造一个使样本可分的特征空间。
最后一步是比较测试,也就是说通过训练得到训练模型参数之后,就可根据模型参数对一个ROI区域进行计算,判断其归类(见图4)。
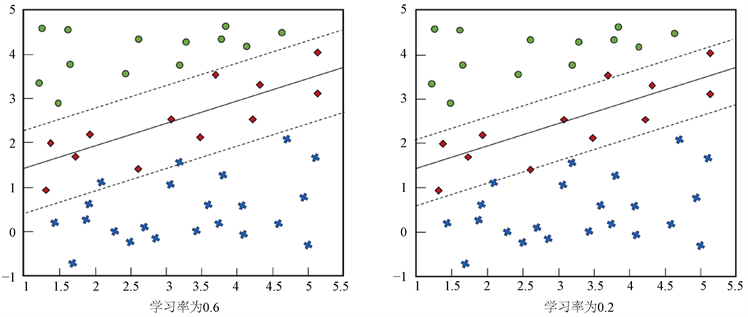
Figure 4. Classification effect of hyperplane in boundary area under different learning rates
图4. 不同学习率下超平面在边界区的分类效果
3. 结果分析
3.1. 图像融合及校正
根据地物功能特征和色彩信息,我们将地物分成以下五类:居民区,农田,绿地,近海养殖区,养殖海域。通过训练数据集,我们构建了基于有监督学习的支持向量机模型。通过对目标区域的全区域识别,我们可以得到该区域地物面积,空间分布格局,以及各类统计参数(见图5)。
根据图像要素,我们使用ArcGIS软件对图像做交叉匹配,绿色点为光束法平差后的影像位置。两个影像间的链接即是在其间找到的连接点。其连接点表示的颜色越深,意味着找到的连接点越多 [36]。根据各个图像连接点多少,我们将图片分为六个等级,其中数字越大表示重合度越高。一般来讲,空间重合度75%以上应保证在4以上(见图6)。根据图像显示,该区域所有空间重合度都在在第四等级以上,符合要求 [37]。

Figure 5. Classification of regional features
图5. 区域地物分类

Figure 6. Region image overlap before pixel fusion
图6. 像素融合前区域图像重叠图
其次,对相机做检校。主点为影像平面上的点,平面上穿过透视中心(照相机镜头)的线与影像平面垂直相交。X方向平行于影像列的方向,Y方向平行于行的方向,主点位置以影像平面的物理中心为参考(见图7)。
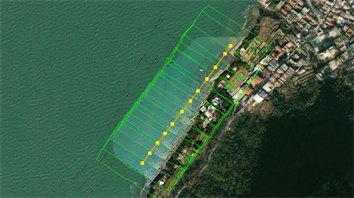
Figure 7. Remote sensing image of UAV in wide range recognition area after pixel fusion
图7. 像素融合后,广范围识别区域无人机遥感图
将边缘像素不足的地方剔除掉以后,得到的全区域像素影响融合图如上所示。结果显示,边缘像素(飞行方向)更容易受到裁切影响,因而在选择目标区域的时候,应该更多的考虑边界效应,拍摄更多的影响图片以保证目标的覆盖率。
3.2. 图像识别结果
根据SVM模型识别结果,我们得到了如下空间分布图。对于小样本模型而言,SVM表现出了较高的空间格局识别(见图8)。
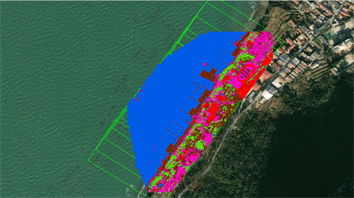

Figure 8. SVM based spatial feature recognition results
图8. 基于SVM的空间地物识别结果
根据图像识别结果,该区域单位面积近海养殖覆盖率在16.4%。相对于其他典型养殖区单位覆盖率,该区域覆盖率处于相对低值。其中各个部分的训练及容量和SVM识别结果如下表所示(见表3)。
Table 3. Recognition effect of feature area
表3. 特征区域识别效果
其中养殖海域训练集容量为15%,SVM识别结果为58.8%,在一些外海海域出现了识别错误的情况,这主要和该区域的网箱未加入训练集有关;居民区训练集容量为5%,SVM识别结果为7.9%,部分居民区出现了不连续性,这主要是受加入训练集选区的边缘区域所影响;植被区域训练集容量为5%,SVM识别结果为9.7%,由于植被区域和农田存在较大区分难度,结果可能受人为主观的训练集选择影响较大;农田的训练集容量为15%,SVM识别结果为14.3%,与植被同理,部分区域存在和农田交叉的情况,且由于该区域出现了学校操场,部分足球场被识别为植被或者农田,这些区域需要人为校正;近海养殖区训练集容量为5%,SVM识别结果为9.6%,近海养殖区多以筏架和水下网箱为主,裸出水面的部分较少,多为结构性较强但是像素点较弱的几何机构,从识别效果来看,SVM可以基本抓住该地物特征,在之后的研究中我们可以加入有几何信息的训练要素和算法,来改善模型对海洋养殖区域的识别效果。
3.3. 误差分析
主点为影像平面上的点,平面上穿过透视中心(照相机镜头)的线与影像平面垂直相交。X方向平行于影像列的方向,Y方向平行于影像行的方向。主点位置以影像平面的物理中心为参考。镜头内参与畸变参数由Brown-Conrady模型进行定义,非畸变图像通过像素值的双线性插值计算。GPS定位偏差如下表(见表4)。
Table 4. GPS positioning deviation
表4. GPS定位偏差表
该表显示了GPS的初始位置信息可通过校正执行的影像定位更改,初始GPS位置和校正后的位置如图所示。红色点为GPS影像的初始位置,扩大了40×倍的灰色矢量表示通过校正执行的定位更改。
4. 结果讨论
4.1. 无人机遥感存在的问题
在本次调查中,我们发现从任务设计到航迹规划,再到拍摄地物时,应注意如下问题:1) 选取更多的拍摄范围区域,为目标区域留出更多的动态范围,以保证后期处理时的完整性。2) 在不可抗因素(天气,光照,水汽等)的影响下,相机及传感器可能存在云台偏移等问题,在处理成DEM正射图像时候,我们应该尽可能保证图像融合时候的像素的匹配问题,有时会要求牺牲一下精度来保证区域的整体性,这需要根据任务的要求来动态调整。3) 无人机操纵方面存在的不确定性要求我们尽可能的按照规划飞行,这时可以使用三脚架模式来稳定飞行器飞行。因此,无人机遥感的影像质量将决定后期机器学习及图像处理时的精度和准确性。
4.2. 水产养殖区域应用要求
水产养殖区存在着其特殊的空间信息特征,在进一步做图像识别时,应该根据不同区域,结合人工分析和文献资料等充分考虑其地域特殊性,从而改进算法,优化模型。例如:该区域的水产养殖区域存在着其特殊的集合机构,网箱框架以较为相近的矩形为主,并且其空间位置较为统一。因此,考虑有监督的机器学习模型训练集选择的时候,我们应该较多的加入其几何要素,例如矩形的关键点控制,对角线像素长度的定义等。这也为未来的无人机水产区域遥感提供了参考。
致谢
感谢中国海洋大学SRDP (Student Research Developing Program)本科生研究发展计划(861903106079),以及山东省重点研发计划(公益类专项) (2019GHY112014)的经费支持。
文章引用
连 鹏,刘 阳,何晓晴,景有甫,黄聪颖,董浙燚,宋旭辉,徐安康. 基于无人机遥感的海洋养殖区识别研究
Mariculture Areas Recognition Based on UAV Remote Sensing[J]. 水产研究, 2019, 06(04): 179-188. https://doi.org/10.12677/OJFR.2019.64024
参考文献
- 1. 刘斌, 史云, 吴文斌, 段玉林, 赵立成. 基于无人机遥感可见光影像的农作物分类[J]. 中国农业资源与区划, 2019, 40(8): 55-63.
- 2. 刘建晓, 孟令辉, 李辉, 杜蒙, 童萌萌, 魏淑珍. 基于无人机遥感技术的衡水湖生态调查研究[J]. 衡水学院学报, 2019, 21(4): 1-5.
- 3. 孙中宇, 黄钰辉, 杨龙, 王重洋, 孙红斌, 王佐霖, 张卫强, 甘先华. 基于无人机遥感的古银叶树群落健康快速诊断[J]. 热带地理, 2019, 39(4): 538-545.
- 4. 陈黎, 刘淑冰, 李万能. 无人机遥感在河流岸线资源监管中的应用[J]. 热带地理, 2019, 39(4): 521-530.
- 5. 张海宾. 无人机遥感技术在现代矿山测量中的应用探讨[J]. 世界有色金属, 2019(6): 44-46.
- 6. 李永河. 无人机遥感在林业调查领域的应用[J]. 江西农业, 2019(10): 82.
- 7. 刘斌. 基于无人机遥感影像的农作物分类研究[D]: [硕士学位论文]. 北京: 中国农业科学院, 2019.
- 8. 方德涛, 刘珊珊, 张笑. 低空无人机遥感系统在海岛潮间带监测中的应用[J]. 北京测绘, 2019, 33(1): 71-75.
- 9. 蔡良玫, 李昆, 王林萍. 美、日、中航空植保产业发展的比较与启示[J]. 中国植保导刊, 2019, 39(7): 60-63.
- 10. 满亚洲, 朱兰艳, 吕文雅. 低空无人机航测系统在高原复杂地形量测中的应用[J]. 激光杂志, 2019, 40(8): 22-25.
- 11. 崔胜涛. 海域和海岛无人机遥感监视监测系统的研究与应用[J]. 测绘与空间地理信息, 2019, 42(7): 122-124.
- 12. 张帅. 基于无人机低空遥感的农田信息采集与处理研究[J]. 安徽农学通报, 2019, 25(13): 149-151.
- 13. 闫静, 张彩云, 张永年, 李雪丁, 张宁, 江山, 商少凌. 基于无人机遥感技术的港湾养殖区监测[J]. 厦门大学学报(自然科学版), 2016, 55(5): 742-748.
- 14. 刘小辉. 基于无人机影像的小麦叶绿素含量及产量定量反演研究[D]: [硕士学位论文]. 合肥: 安徽大学, 2019.
- 15. 王增竹. 浅析无人机航拍技术在水电行业中的应用[J]. 水电站设计, 2019, 35(2): 26-29.
- 16. 刘伏秋, 刘建英, 黎良平. 我国植保无人机应用现状及发展趋势分析[J]. 湖北农机化, 2019(15): 10-11.
- 17. 张永年. 无人机低空遥感海洋监测应用探讨[J]. 测绘与空间地理信息, 2013, 36(8): 143-145.
- 18. 吴晓锐. 无人机航测在建筑施工现场的应用[J]. 居舍, 2019(26): 162.
- 19. 陈芳香. 无人机航测在桐城某矿山测绘中的运用[J]. 世界有色金属, 2019(14): 16-17.
- 20. 凌云. 无人机航拍技术在测绘工作中的应用[J]. 黑龙江科学, 2019, 10(12): 88-89.
- 21. 张洁. 无人机遥感测绘技术在工程测绘中的应用探究[J]. 信息与电脑(理论版), 2019(15): 13-15.
- 22. 许欣欣. 无人机遥感海洋监测技术及其发展[J]. 科技传播, 2019, 11(7): 97-98.
- 23. 胡青. 无人机遥感海洋监测应用探讨[J]. 环境与发展, 2017, 29(7): 117-119.
- 24. 曹洪涛, 张拯宁, 李明, 李器宇. 无人机遥感海洋监测应用探讨[J]. 海洋信息, 2015(1): 51-54.
- 25. 刘乾飞, 龙晓敏, 邓忠坚, 叶江霞. 无人机遥感技术在国家森林公园可视化场景快速构建中的应用[J]. 林业资源管理, 2019(2): 116-122.
- 26. 曾宏琦, 文承荣. 无人机遥感技术在开发建设项目水土保持监测中的应用[J]. 广东水利水电, 2019(8): 91-95.
- 27. 李维. 无人机遥感技术在林业资源调查与病虫害防治中的应用[J]. 中国农业文摘–农业工程, 2019, 31(5): 45-46+60.
- 28. 周海. 无人机遥感技术在现代矿山测量中的探讨[J]. 世界有色金属, 2019(14): 14-15.
- 29. 荣泽山, 王爱博. 无人机遥感技术与GIS数据处理在林业系统中的应用[J]. 吉林农业, 2019(17): 100.
- 30. 黄登红, 周忠发, 吴跃, 朱孟, 尹林江, 崔亮. 基于无人机可见光影像的高原丘陵盆地区山药植株识别[J]. 热带地理, 2019, 39(4): 571-582.
- 31. 高凌洁, 张少凤. 无人机遥感技术在采煤地面塌陷监测中的应用[J]. 微型电脑应用, 2019, 35(7): 66-68.
- 32. 周晓妹. 试论无人机遥感技术在测绘工程测量中的应用[J]. 居舍, 2019(20): 196.
- 33. 张海文. 探讨测绘工程测量中无人机遥感技术运用[J]. 建材与装饰, 2019(19): 212-213.
- 34. 朱涛. 浅谈三维地形建模系统及无人机在单体建筑建模中的应用[J]. 江西测绘, 2019(2): 22-30.
- 35. 尹冬丽, 郭腾龙. 基于无人机测绘的地理信息定位技术研究[J]. 居舍, 2019(18): 163.
- 36. 王飞, 高小伟, 高宁, 赵建华, 吴合风, 孟庆辉. 面向海洋应用的无人机遥感图像配准研究[J]. 测绘通报, 2017(11): 123-127.
- 37. 姚鹏, 綦声波, 黎明. 基于无人机/无人艇的最优动态覆盖观测技术[J]. 海洋科学, 2018, 42(1): 106-111.
NOTES
*通讯作者。