Modeling and Simulation
Vol.05 No.03(2016), Article ID:18396,6
pages
10.12677/MOS.2016.53014
Optimal Control Strategy of Chang’e-3 Main Reduce Phase and Quick Adjustment Phase
Jingjing Zhang1,2, Yunlong Fei1, Lifei Zheng1*
1Department of Applied Mathematics, Northwest A&F University, Yangling Shaanxi
2School of Mathematical Sciences, Zhejiang University, Hangzhou Zhejiang

Received: Aug. 4th, 2016; accepted: Aug. 22nd, 2016; published: Aug. 25th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
To study the optimal control strategy of the main reduction phase and quick adjustment phase in the process of Chang’e-3 soft landing, we established the optimal model for these two phases according to the Newton’s second law. The error analysis and sensitivity analysis were made to show the efficiency of the method used in this paper.
Keywords:Chang’e-3 (CE-3), Main Reduction Phase, Quick Adjustment Phase, Optimal Control, Sensitivity Analysis

嫦娥三号主减速段和快速调整段 最优控制策略研究
张晶晶1,2,费云龙1,郑立飞1*
1西北农林科技大学应用数学系,陕西 杨凌
2浙江大学数学科学学院,浙江 杭州

收稿日期:2016年8月4日;录用日期:2016年8月22日;发布日期:2016年8月25日

摘 要
研究嫦娥三号(CE-3)软着陆过程中的主减速段和快速调整段这两个阶段的最优控制策略,根据牛顿第二定律,建立针对这两个阶段的燃耗最优模型,得到最优控制策略。误差分析和敏感性分析说明了本文所用方法的有效性。
关键词 :嫦娥三号,主减速阶段,快速调整阶段,最优控制,敏感性分析

1. 引言
2013年12月14日,嫦娥三号(CE-3)在月球表面实现软着陆,这是1976年后人类探测器首次落月探测,对人类科学考察月球资源、环境具有重大意义 [1] - [3] 。
CE-3的软着陆过程是指CE-3从近月点降落到月面的过程,共分为6个阶段(图1):
1) 主减速段:从距离月面15 km减少到3 km,实现CE-3减速;
2) 快速调整段:距月面3 km到2.4 km,在2.4 km处将水平速度减为0 m/s,期间调整姿态,使发动机推力竖直向下;
3) 粗避障段:距月面2.4 km到100 m,主要避开大的陨石坑,拍照获得数字高程图,并初步确定落月地点;
4) 精避障段:距月面100 m到30 m,CE-3拍照获得数字高程图,确定最佳着陆地点;
5) 缓速下降段:距月面30 m到4 m,实现在距月面4 m处速度降为0 m/s;
6) 自由落体段:距月面4 m到月面,此阶段CE-3关闭发动机,自由落体到精确的落月点。
以上6个阶段的研究方法都不尽相同,其中主减速段和快速调整段主要实现了CE-3减速和姿态调整,使CE-3基本调整到预定着陆点上方,因此对这两个阶段的研究是对整个软着陆过程研究的关键内容。目前对软着陆过程的研究中,和兴锁等 [4] 给出最优推力控制方向的计算公式,周净扬等 [5] 将问题转化为两点边值问题,利用Pontryagin极大值原理,得到发动机推力的最优控制律。还有多名学者 [6] 利用Simulink
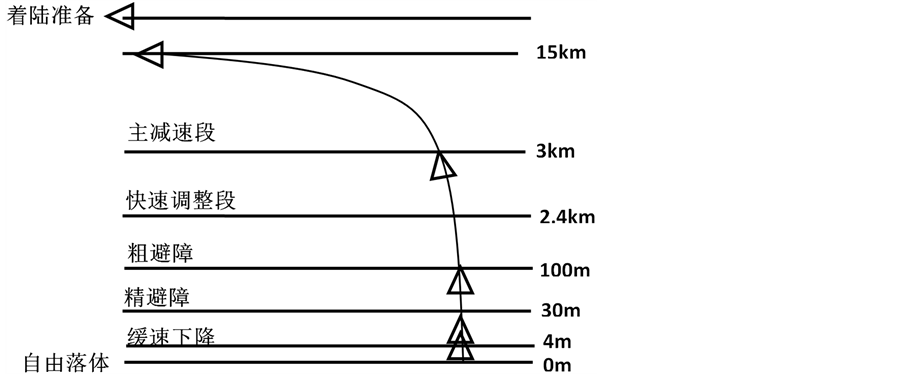
Figure 1. Chang’e-3 soft landing process
图1. 嫦娥三号月球软着陆过程示意图
软件进行轨迹仿真,等等。这些方法都是针对软着陆整体过程进行研究的,忽略了软着陆不同阶段研究方法不尽相同的事实,没有对主减速段和快速调整段的进行专门研究。
本文针对CE-3软着陆的主减速段和快速调整段,基于牛顿第二定律,燃耗最优原则,建立起这两个阶段CE-3的数学模型,给出针对两个阶段的最优控制策略。
2. 最优控制策略研究
最优控制策略是指达到燃耗最少、轨道与实际最相符这两个目标的控制策略。文献 [7] 指出主减速段和快速调整段CE-3不仅受月球引力,而且也受自身多台发动机的推力。推力方向和大小会随实际需要做微小调整,引力方向和大小也会随着CE-3轨迹的变化有微小变动。为了简化问题,在实际情况允许的范围内,本文做出如下假设:
(A1) 嫦娥三号在软着陆的主减速段和快速调整阶段的受力状态相同;
(A2) 在主减速和快速调整阶段发动机推力f方向恒定,大小可变;
(A3) 月球对CE-3的引力恒定(即:CE-3所受重力恒定);
(A4) 不考虑月球自转对轨迹的影响。
文献 [7] 指出CE-3在主减速阶段的开始点速度方向水平,大小为近月速度。故这两个阶段CE-3做初速度水平,受恒力的类平抛运动,且水平方向CE-3所受合力方向与初速度方向相反,竖直方向CE-3所受合力指向月球。
由假设(A1)~(A4)和以上的分析,主减速段和快速调整段CE-3的受力分析见图2。
图中发动机推力大小为 ,该力与水平方向夹角为
,该力与水平方向夹角为 ,
, 是比冲(单位米/秒),
是比冲(单位米/秒), 是单位时间燃料消耗(单位:公斤)。
是单位时间燃料消耗(单位:公斤)。
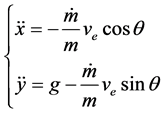
由牛顿第二定律,对CE-3的受力沿水平x方向和竖直y方向分解,分别取水平向右和竖直向下为水平、竖直方向的正方向,有如下结果:

式中 是CE-3的质量,随时间间
是CE-3的质量,随时间间 的增大而减少。
的增大而减少。
整理得:
根据假设(A2), 方向不变。取
方向不变。取 为经历这两个阶段共需要的时间,在区间
为经历这两个阶段共需要的时间,在区间 上,沿x方向两次对
上,沿x方向两次对 积分,有
积分,有
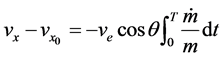
式中, 为水平末速度0,
为水平末速度0, 为水平初速度
为水平初速度 (
( 方向与正方向相反,故符号取负),由此得
方向与正方向相反,故符号取负),由此得
 (1)
(1)
式中 表示这两个阶段结束后CE-3的质量,即:CE-3的剩余质量。
表示这两个阶段结束后CE-3的质量,即:CE-3的剩余质量。
在区间 上,沿y方向两次对
上,沿y方向两次对 积分,并用
积分,并用 表示这两个阶段的高度差,即
表示这两个阶段的高度差,即 从0时刻的高度到
从0时刻的高度到
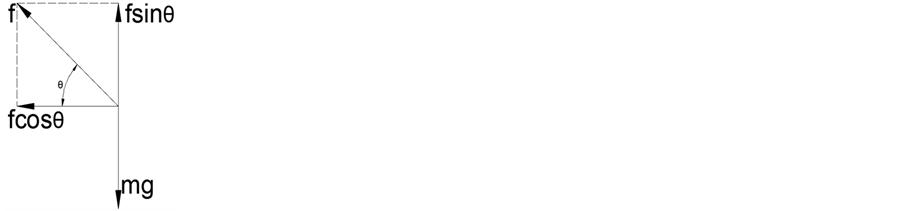
Figure 2. Force analysis of Chang’e-3 in the main reduction phase and quick adjustment phase
图2. 嫦娥三号在主减速阶段和快速调整阶段受力分析
 时刻的高度变化(高度由高降到低的变化),有
时刻的高度变化(高度由高降到低的变化),有
即:
 (2)
(2)
将式(1)平方后与式(2)平方后相加,得:
 (3)
(3)
由于 ,所以使等式右端取值最大的
,所以使等式右端取值最大的 值为
值为 ,此时嫦娥三号剩余质量
,此时嫦娥三号剩余质量 最大,为
最大,为
 (4)
(4)
式(4)就是针对主减速段和快速下降段所建立的燃耗最优模型。
3. 相关数据和参数的选取和计算
根据文献 [7] ,相关参数取值为:初始速度 ,初始质量
,初始质量 ,发动机比冲
,发动机比冲 ,主减速和快速下降段的高度差
,主减速和快速下降段的高度差 ,月球表面重力加速度
,月球表面重力加速度 。
。
代入参数值到模型(4)中,求出最大剩余质量 。
。
此时,嫦娥三号的推力为 。根据假设(A2),该力为恒力,水平分力为
。根据假设(A2),该力为恒力,水平分力为 亦为恒定值,所以水平方向可以看做速度由
亦为恒定值,所以水平方向可以看做速度由 减为0的匀减速运动,加速度
减为0的匀减速运动,加速度 ,由
,由 ,得
,得 。
。
故主减速和快速调整段的最优控制策略是发动机推力大小恒为24989.95 N,方向与轨迹方向相反且与水平方向夹角为 。
。
4. 敏感性分析和误差检验
根据上述研究结果,主减速阶段和快速调整阶段建立的数学模型是式(4)。在该模型中,取月球表面重力加速度 ,比冲
,比冲 ,主要讨论燃料初始质量
,主要讨论燃料初始质量 、主减速段初至快速调段末的高度差
、主减速段初至快速调段末的高度差 、近月点的速度
、近月点的速度 三者在它们的估计值附近存在微小变化时对问题结论的影响 [8] 。
三者在它们的估计值附近存在微小变化时对问题结论的影响 [8] 。
① 初始速度
固定 ,
, ,分析
,分析 的变化对最终剩余质量的影响,这时模型1变为
的变化对最终剩余质量的影响,这时模型1变为 。
。
令参数 在估计值1962上下各改变1%和5%,计算剩余燃料质量,数值结果见表1。
在估计值1962上下各改变1%和5%,计算剩余燃料质量,数值结果见表1。
 随参数
随参数 变化的敏感度,记为
变化的敏感度,记为 。代入相关参数值,模型(4)为:
。代入相关参数值,模型(4)为:
在 时,
时, 关于
关于 的敏感度为:
的敏感度为:

它表明初始速度每降低1%将导致剩余燃料质量增加0.571%,表明剩余燃料质量对初始速度的敏感性很低。
② 垂直高度
固定 ,
, ,分析
,分析 的变化对
的变化对 的影响。令参数
的影响。令参数 在估计值
在估计值 上下各改变1%和5%,分别估计剩余燃料质量,数值结果见表2。
上下各改变1%和5%,分别估计剩余燃料质量,数值结果见表2。
此时高度差与剩余燃料质量的关系为 ,所以在
,所以在 附近,H关于
附近,H关于 的灵敏度为:
的灵敏度为:

结果表明,高度差每增加1%,剩余燃料的质量减少0.0048%,表明剩余燃料质量对高度差的敏感性非常低。
③ 初始质量
固定主减速阶段 、
、 ,分析
,分析 的变化对
的变化对 的影响。此时,模型为
的影响。此时,模型为 ,令参数
,令参数 在估计值 2400 上下各改变1%和5%,分别估计剩余燃料质量,得到数值如表3。
在估计值 2400 上下各改变1%和5%,分别估计剩余燃料质量,得到数值如表3。
此时CE-3初始质量与剩余质量的关系为 ,所以在
,所以在 附近,
附近, 。
。
关于 的灵敏度为:
的灵敏度为:

结果表明,飞船初始质量每增加1%,剩余燃料的质量增加0.999%,说明剩余燃料质量对初始质量

Table 1. Sensitivity analysis of initial velocity v0
表1. 初始速度v0敏感性分析
Table 2. Sensitivity analysis of vertical height H
表2. 垂直高度H敏感性分析
Table 3. Sensitivity analysis of initial mass m0
表3. 初始质量m0敏感性分析
的敏感性非常低。
另外,模型1所得结论合理,和文献 [7] 相关结论吻合,可认为误差比较小,相关结论是可靠的。
本文误差主要产生在假设部分,假设(A2)认为发动机推力f方向恒定,实际操作中f方向是有微小变化的,故产生误差。具体误差大小还要在以后继续进行研究。
5. 结论
本文针对嫦娥三号主减速和快速下降这两个飞行阶段,忽略了非重点因素的影响,提出适当合理的假设,构建了理论模型来解决燃耗最优问题。模型得出的最终结果与实际资料相吻合,误差及敏感性分析的结果表明计算结果是可以接受的。但是,本文在忽略了其它阶段的研究,其进一步的工作还需要在将来的研究中继续进行。
基金项目
本文受到西北农林科技大学基本科研业务专项资金资助(No. 2014YB023),西北农林科技大学博士科研启动项目资助(No.Z109021414),西北农林科技大学本科优质课程建设项目资助(数学模型)及西北农林科技大学教改项目资助(No.JY1504078)。
文章引用
张晶晶,费云龙,郑立飞. 嫦娥三号主减速段和快速调整段最优控制策略研究
Optimal Control Strategy of Chang’e-3 Main Reduce Phase and Quick Adjustment Phase[J]. 建模与仿真, 2016, 05(03): 105-110. http://dx.doi.org/10.12677/MOS.2016.53014
参考文献 (References)
- 1. 欧阳自远, 李春来, 等. 深空探测的进展与我国深空探测的发展战略[J]. 中国航天, 2002, 12(2): 28-32.
- 2. 欧阳自远. 我国月球探测的总体科学目标与发展战略[J]. 地球科学进展, 2004, 19(3): 351-353.
- 3. 王宏, 黄勇, 潘敏. 基于地面测量的月球软着陆轨迹解算精度分析[C]//第二届全国航天飞行动力学研讨会会议文摘. 贵阳, 2013: 304-308.
- 4. 和兴锁, 林胜勇, 张亚峰. 月球探测器直接软着陆最优轨道设计[J]. 宇航学报, 2007, 28(2): 309-410.
- 5. 周净扬, 周荻, 段广仁. 月球探测器软着陆最优轨道设计[C]. 程代展. 第25届中国控制会议论文集: 下册. 北京: 北京航空航天大学出版社, 2006: 2226-2229.
- 6. 单永正, 段广仁, 张烽. 月球精确点软着陆轨道设计及初始点选取[J]. 宇航学报, 2009, 30(6): 2099-2100.
- 7. 中国新闻网. 嫦娥三号“落月”在即解密如何实现月球软着陆. http://www.cjinanews.com/mil/2013 /12-12/5608941.shtml, 2013-12-12.
- 8. 刘来福, 黄海洋, 曾文艺. 数学模型与数学建模[M]. 北京: 北京师范大学出版社, 2010: 23-25.