Modeling and Simulation
Vol.
12
No.
06
(
2023
), Article ID:
76207
,
9
pages
10.12677/MOS.2023.126518
基于ROS的机场智能驱鸟系统仿生学 总线仿真分析
匡姝静1,孙磊1,夏菽兰1,柳士伟2,肖鑫2,蒋冬梅1
1盐城工学院电气工程学院,江苏 盐城
2东部战区空军保障部直属保障队,江苏 南京
收稿日期:2023年9月23日;录用日期:2023年11月21日;发布日期:2023年11月28日

摘要
智能驱鸟系统对实时性要求高,本文研究了基于ROS (Robot Operating System)的机场智能驱鸟系统的设计与实现。其中,关注点集中在仿生学总线的设计与仿真分析上。首先,通过收集和分析现有的驱鸟系统和仿生学总线相关领域的研究,建立了机场智能驱鸟系统的基本原理和需求。然后,提出了一种以ROS作为基础的仿生学总线设计方案,并利用仿真工具评估了该设计方案的性能。采用光电、雷达采集机场鸟群的图像信息,声采集传感器采集声音信息,图像信息通过UVC仿生学协议交互,声音信息通过UDP仿生学协议交互,通过仿生学协议在终端计算机之间远程传输并解码的形式完成鸟类信号的图像和声音特征性传输。鸟群目标检测图像和视频数据传输给上位机,上位机软件显示采集的图像,并将图像数据经过存储,通过UVC仿生学协议将采集的图像的参数传输,包括鸟类的体积、大小、出现频率、危险系数以及标定等信息,从而减少图像或视频的识别辨析过程,提高系统快速识别的速率。声音信息通过UDP仿生学协议交互,将南北方鸟类、鸟类攻击性及鸟类其它信息进行传输,并将有针对性的播放目标鸟群的天敌叫声,同类惨叫声、噪声及枪炮声控制指令发送到强声设备,快速有效实现目标鸟群的驱离。
关键词
ROS,仿生学总线,仿真分析

Simulation Analysis of Bionic Bus in ROS-Based Intelligent Bird Repelling System at Airports
Shujing Kuang1, Lei Sun1, Shulan Xia1, Shiwei Liu2, Xing Xiao2, Dongmei Jiang1
1School of Electrical Engineering, Yancheng Institute of Technology, Yancheng Jiangsu
2Eastern Theater Air Force Support Unit Directly under the Support Department of the East Theater Command, Nanjing Jiangsu
Received: Sep. 23rd, 2023; accepted: Nov. 21st, 2023; published: Nov. 28th, 2023

ABSTRACT
The intelligent bird repellent system has high requirements for real-time performance. This article studies the design and implementation of an intelligent bird repelling system at airports based on ROS (Robot Operating System). The focus is on the design and simulation analysis of a bionic bus. Firstly, by collecting and analyzing existing research on bird repelling systems and bionic buses, the basic principles and requirements of the intelligent bird repelling system at airports are established. Then, a bionic bus design scheme based on ROS is proposed, and the performance of this design scheme is evaluated using simulation tools. The image information of the airport bird flock is collected through photoelectric and radar sensors, and the sound information is collected through sound acquisition sensors. The image information is transmitted using the UVC bionic protocol, and the sound information is transmitted using the UDP bionic protocol. The bird signals, including image and sound characteristics, are transmitted remotely between terminal computers through bionic protocols and decoded. The bird target detection images and video data are transferred to the host computer, where the software displays the collected images and transmits the parameters of the images through the UVC bionic protocol, including the volume, size, frequency of occurrence, danger coefficient, and calibration information of the birds. This reduces the image or video recognition process and improves the rate of rapid identification. The sound information is transmitted using the UDP bionic protocol, conveying information about bird species, bird aggressiveness, and other bird-related information. Target bird flock repelling instructions, such as predator calls, same-species distress calls, noise, and gunshot sounds, are sent to the sound device for quick and effective bird repelling.
Keywords:ROS, Bionic Bus, Simulation Analysis

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在过去的几十年里,因为鸟类与飞机之间的碰撞事件频繁发生,导致了很多机场事故和财产损失 [1] [2] [3] [4] [5] 。因此,驱鸟系统的研究和应用变得非常重要。ROS (机器人操作系统)是一种广泛应用于机器人领域的操作系统,在驱鸟系统中,ROS可以用于控制和管理驱鸟设备,使其更加智能和自动化 [6] - [12] 。驱鸟设备可以通过网络连接进行远程控制和管理、数据传输和处理,并与其他设备进行交互。此外,ROS还支持多种编程语言,使得开发人员可以使用不同的编程语言进行开发和定制,这些优势使得驱鸟系统具有更高的适应性和可扩展性 [13] - [18] 。
仿生学总线是一种基于生物特征信息的分类传输技术。通过对不同鸟类的生物特征信息进行分类和传输,可以实现驱鸟系统的准确性和实时性。通过分析不同鸟类的声音频率和振动模式等特征,可以提前判定鸟类的类型,并采取相应的措施进行驱赶。这种基于生物特征的分类传输技术,可以更快速、准确地实现驱鸟的目的。目前,研究人员致力于开发和改进各种生物特征识别与分类算法,包括声音识别、图像识别、振动特征分析等,通过使用机器学习、深度学习等技术,可以提取出更多有效的鸟类生物特征,并准确地将其分类传输到仿生学总线中。其次,研究数据传输和处理技术,包括数据压缩、分布式计算、网络传输优化等,这些技术的应用可以提高传输效率、减少数据延迟,并确保数据的完整性和安全性。研究人员正在探索将仿生学总线与机器学习、人工智能等技术相结合,以实现自动化的鸟类识别、行为分析和驱赶策略生成,这样的系统可以根据不同鸟类的行为和反馈信息,自动调整驱赶装置的参数,提高驱赶效果。
2. 机场智能驱鸟系统总体框架
驱鸟系统是指一种专门用于驱赶或防止鸟类进入机场空域的技术系统。其主要作用是保障飞行安全,防止鸟类撞击飞机等意外事故的发生。机场作为航空交通枢纽,是飞机起降和停靠的重要场所。然而,机场周围通常是广阔的开放区域,很容易成为大量鸟类的栖息地或迁徙路径。而飞机与鸟类的接触往往会导致严重的后果,如鸟击飞机引发的引擎故障、飞机失控等。因此,机场需要有效的驱鸟系统来保障飞行安全。整体架构如图1所示。
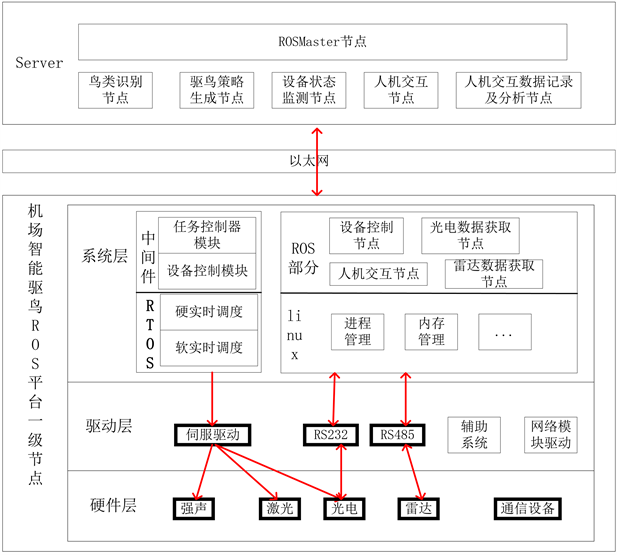
Figure 1. Airport intelligent bird control system overall architecture diagram
图1. 机场智能驱鸟系统总体架构图
机场智能驱鸟系统的整体框架应包括以下几个方面:监测系统、预警系统、防控系统和管理系统。
监测系统是机场智能驱鸟系统的基础,其作用是对机场周边的鸟类进行实时监测和数据收集。监测系统可以通过使用气象雷达、红外摄像头和声音传感器等多种技术手段,连续监测机场周围的鸟类活动情况,并将数据传输到预警系统。如图2所示智能驱鸟系统工作话题流程图。

Figure 2. Airport intelligent bird repellent system-workflow diagram
图2. 机场智能驱鸟系统工作话题流程图
预警系统则根据监测到的鸟类数据,通过数据分析和模型预测,判断出鸟类可能接近机场的时间和位置,并进行预警。预警系统通常包括警报设备、警报信号和数据显示界面等,能够及时向机场管理人员发出鸟类接近的警报信息。
防控系统是机场智能驱鸟系统的核心部分,其目标是通过采取各种手段,如声音、光线或气味的发射,驱赶鸟类远离机场。防控系统可以根据预警系统提供的鸟类数据和模型,自动调整和控制驱鸟手段的强度和方向,以达到最佳的驱鸟效果。
管理系统是机场智能驱鸟系统的管理和控制中心,其主要功能是对监测、预警和防控系统进行集中管理和控制。管理系统可以通过数据分析和模型优化,提供驱鸟策略的优化和调整,并记录和归档机场的驱鸟数据和事件信息,以供研究和统计分析。
机场智能驱鸟系统是一种基于监测、预警、防控和管理的综合技术系统,其通过对机场周边鸟类活动的监测和预警,以及自动化的防控手段,能够保障飞行安全,防止鸟击事故的发生。在未来,随着技术的不断进步和智能化水平的提高,机场智能驱鸟系统将具备更高的准确性、灵活性和自动化程度,进一步提升机场的安全性和效率。
3. 机场智能驱鸟系统仿生学总线
仿生学总线是机场智能驱鸟系统中的一种通信架构,其目的是为了集成和控制不同的驱鸟技术,实现对鸟类的驱散。通过仿生学原理,将鸟类的生物特征信息放在不同的字节传输,可以快速实现鸟类驱赶。其作用在于协调和整合各个驱鸟技术,实现智能化的驱鸟过程,提高驱鸟系统的效率和灵活性。在机场智能驱鸟系统中,仿生学总线需要具备高速传输、低延迟、高可靠性和适应不同类型驱鸟技术的要求。通过仿生学总线,不同的驱鸟技术可以在集成和控制的环境下协同工作,提高整个系统的驱鸟效果,可以灵活地添加或替换不同的驱鸟技术,以满足驱鸟系统的需求。同时,仿生学总线的可扩展性也能够应对系统规模和复杂性的变化,不同的组件可以共享驱鸟系统中的数据,实现协调和决策。这样可以更好地控制驱鸟过程,提高系统的效率和响应性。仿生学总线的系统架构如图3所示。
检测设备监测鸟类活动、获取鸟类数据的作用。通过总线连接,光电雷达设备可以将监测到的鸟类数据发送给其他组件进行处理和决策。强声、激光灯驱鸟设备进行通信,并接收决策结果和控制指令,驱鸟设备可以根据传感器数据和系统的决策来进行相应的驱散行为。上位机是机场智能驱鸟系统的中枢,负责协调和控制各个组件的工作。通过总线,上位机可以与检测设备及驱鸟设备进行通信,并进行数据交换和决策。上位机可以依据检测设备获取的数据和系统算法来制定相应的驱鸟策略,并将相应的控制指令发送给驱鸟设备。
机场智能驱鸟系统仿生学总线的设计,如图4所示分为多个层级,包括应用层、传输层、网络层和MAC层。这些层级用于实现驱鸟系统中的信息传输、通信和控制功能。
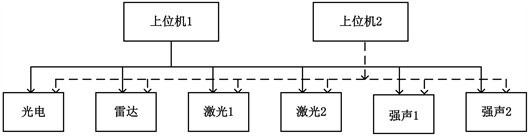
Figure 3. Bionic bus system architecture
图3. 仿生学总线的系统架构
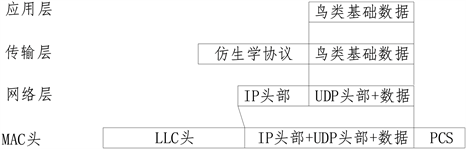
Figure 4. Hierarchical design of the bionic bus system
图4. 仿生学总线的层级设计
应用层是机场智能驱鸟系统中的最高层,负责驱鸟系统中各个功能模块的控制和管理。在应用层中,设置驱鸟算法、监测鸟类行为、制定驱散策略,并与其他层级进行交互。
传输层是机场智能驱鸟系统中实现消息传递和数据交换的关键层级,负责将应用层产生的数据进行封装和传输,以及处理数据的完整性和可靠性,使用UDP协议进行通信。
网络层是机场智能驱鸟系统中实现节点之间通信和路由选择的层级,负责管理不同设备之间的连接,并确定数据包的最佳路径以进行传输。在机场智能驱鸟系统中,用IP协议作为网络层的基础。
MAC层是机场智能驱鸟系统中实现数据帧传输和设备连接的层级,负责协调多个设备之间的访问和传输,以确保数据的有效传输。在机场智能驱鸟系统中,使用以太网的MAC协议。
4. 仿生学总线仿真分析
4.1. 机场智能驱鸟系统总线架构
采用ROS的分布式发布–订阅模型,构建仿生学总线的总线架构,该模型允许多个节点之间通过主题(Topic)进行异步通信。通过定义主题,各个节点可以在仿生学总线中交换信息,如图5所示。
在ROS中,节点通过订阅(Subscribe)和发布(Publish)的方式进行信息的交换,发布者节点将消息发布到特定的主题上,而订阅者节点可以选择性地订阅感兴趣的主题,以接收发布者节点发送的消息。
在仿生学总线中,通过定义和订阅不同的主题,各个节点可以实现对所需信息的获取和处理,从而实现智能化的驱鸟操作,这种分布式发布–订阅模型使得多个节点之间可以实现异步通信,实现了节点的解耦和信息的传递。
4.2. 机场智能驱鸟系统通信协议及数据格式
使用ROS Message作为通信协议,在仿生学总线中,通过自定义消息类型传输探测鸟类特征及位置信息,如表1所示,使用ROS消息作为通信协议可以充分利用ROS提供的消息传递机制,实现节点之间的数据交换。

Figure 5. Topic publishing and subscription graph for intelligent bird deterrent nodes
图5. 智能驱鸟节点话题发布订阅图

Table 1. Definition of data transmission byte for bionic bus
表1. 仿生学总线的数据传输字节定义
Byte1表示鸟类与特定群体区域的关联程度,Byte2&3表示鸟群的群体值,Byte4用来表示危险最强的鸟类信息,Byte5表示危险最强的鸟类位置信息,Byte6表示危险较强的鸟类信息,Byte7表示危险较强的鸟类位置信息,Byte8表示校验位。使用ROS消息的自定义数据结构,通过定义传感器数据类型、控制指令参数和标识符等来实现数据的提取和解析。
4.3. 仿生学总线ROS平台仿真实现
在ROS平台上搭建智能驱鸟系统并采用仿生学总线传输数据,具体仿真实现:首先创建ROS工作空间,用于存放驱鸟系统的ROS包和相关文件,然后在ROS工作空间下的src目录中创建一个ROS包,以及相应的节点用于实现驱鸟系统,接着在ROS包的msg目录下创建一个消息文件BirdData.msg,并在其中定义体长、速度、体积等鸟类数据的字段。这样可以确保每个字段被正确地映射到消息中的特定字节,其次根据驱鸟系统的具体设计,编写节点代码来模拟光电设备、雷达设备、激光设备等传感器的数据采集和处理过程。在节点代码中,获取传感器产生的鸟类数据,并将其封装为自定义消息类型的消息进行发布。再其次,编写节点代码来处理仿生学总线的数据传输逻辑。在节点代码中,订阅来自传感器节点的鸟类数据消息,并将不同的数据字段分类传输到对应的字节中,使用ROS提供的消息发布和订阅机制,以自定义消息类型为数据载体进行数据传输。最后,在ROS平台上运行仿真测试,使用roslaunch命令运行驱鸟系统的启动文件,启动相关节点,并通过RVIZ工具可视化显示传输数据的分类结果和其他受控变量。运行结果如图6所示。

Figure 6. ROS result graph
图6. ROS结果图
通过运行结果图,可以确定传感器节点是否成功地将鸟类数据封装为自定义消息类型的消息,并发布到相应的主题上,看到仿生学总线的数据传输节点是否成功地订阅了传感器节点发布的鸟类数据消息,并将不同数据字段分类传输到对应的字节中,以便直观地了解驱鸟系统中各个节点的工作状态和数据传输情况,从而帮助进行调试和优化。结合RVIZ工具的可视化显示,还可以更直观地观察和分析驱鸟系统的运行情况,从而进一步改进系统的性能和效果。通过对仿生学总线的ROS仿真实验并收集传输速率、带宽利用率、延迟和系统稳定性能等性能指标数据,如表2所示。
Table 2. Experimental results data
表2. 试验结果数据
通过对仿生学总线的ROS仿真性能进行详细分析和讨论,仿生学总线在驱鸟系统中能够提供较高的数据传输速率,从而能够及时传输和处理大量的鸟类数据,可以最大程度地利用可用带宽,提高数据传输的效率,仿生学总线能够实现较低的延迟时间,实现实时驱鸟,并且仿生学总线在驱鸟系统中表现出较高的稳定性,能够处理各种复杂情况和压力,确保系统始终正常运行。
5. 结束语
本文研究了基于ROS的机场智能驱鸟系统的设计与实现,并重点关注了仿生学总线的设计与仿真分析。通过在ROS平台上构建驱鸟系统的ROS包和节点,以及定义自定义消息类型来实现驱鸟数据的传输和处理,传输效率得到提高。通过ROS的分布式发布–订阅模型和仿生学总线的设计思路,实现了驱鸟系统中各个节点之间的异步通信和信息交换,实现解耦提高系统的运行效率,及故障检修容易。采用仿生学总线传输数据的方式,实现了高速的数据传输、低延迟和优化的带宽利用率,满足驱鸟系统对于实时性和效率的要求,提高系统的驱鸟效果和性能。
文章引用
匡姝静,孙 磊,夏菽兰,柳士伟,肖 鑫,蒋冬梅. 基于ROS的机场智能驱鸟系统仿生学总线仿真分析
Simulation Analysis of Bionic Bus in ROS-Based Intelligent Bird Repelling System at Airports[J]. 建模与仿真, 2023, 12(06): 5703-5711. https://doi.org/10.12677/MOS.2023.126518
参考文献
- 1. 曹飞, 康旭, 胡云锋, 等. 机场智能驱鸟系统技术发展探究[J]. 数字技术与应用, 2022, 40(7): 30-31+82. https://doi.org/10.19695/j.cnki.cn12-1369.2022.07.10
- 2. Mao, X., Zhou, G., Zhou, X., et al. (2021) Research on a New Type of High-Efficiency Composite Polymer Odor Bird Repellent for Overhead Transmission Lines. Journal of Physics: Con-ference Series, 2005, 012129. https://doi.org/10.1088/1742-6596/2005/1/012129
- 3. 丁宇浩, 李栋, 温权龙, 等. 基于物联网监控的智能驱鸟器设计[J]. 实验室研究与探索, 2022, 41(3): 116- 120+132. https://doi.org/10.19927/j.cnki.syyt.2022.03.023
- 4. 王蕊, 李金洺, 史玉龙, 等. 基于视觉的机场无人驱鸟车路径规划算法[J/OL]. 北京航空航天大学学报: 1-10. https://doi.org/10.13700/j.bh.1001-5965.2022.0717, 2023-09-21.
- 5. Arkion Life Sciences (2019) Patent Issued for Ex-tended Performance Bird Repellent Exterior Coating (USPTO 10, 400, 138). Chemicals & Chemistry. https://kns.cnki.net/kcms2/article/abstract?v=PT3z46FIkGkqLf03L5m6z-SC9gi08DU6ZvDGgEMlQxszFMtjNGp3JsH9RBuR0ywGAEJMF6V9JYl SEpofQTHAqT1nYPU3sOexp8eUNCnd5XIYnIm9uQ8ZuDm-v61aBke5N0uuxyaTVFbGdTWXo8ehCR1FuD9W0MAg69CuMK3YzsNHT-clZ50RWZjx5apOMUxX&uniplatform=NZKPT&language=CHS
- 6. 苏瑞芳, 刘富, 陈拓, 等. 基于ROS的移动机器人自动导航设计[J]. 工业控制计算机, 2023, 36(8): 72-73+76.
- 7. Ruijie, W. (2023) Optimization Path and Design of Intelligent Logistics Management System Based on ROS Robot. Journal of Robotics, 2023, Article ID: 9505155. https://doi.org/10.1155/2023/9505155
- 8. 李光宇, 韩雨露, 王鑫鑫. 基于ROS的移动机器人室内路径规划与导航实现[J]. 物联网技术, 2023, 13(8): 87-89. https://doi.org/10.16667/j.issn.2095-1302.2023.08.022
- 9. 陈锦儒, 林洁彬, 张成. 基于ROS系统的自主导航机器人设计[J]. 电脑知识与技术, 2023, 19(23): 99-101+105. https://doi.org/10.14004/j.cnki.ckt.2023.1155
- 10. Federica, S., Enrico, F. and Pasquale, C. (2022) Robot-Agnostic Inter-action Controllers Based on ROS. Applied Sciences, 12, 3949. https://doi.org/10.3390/app12083949
- 11. Jun, .Z, Chen, Z.X., C, Zhou, C., et al. (2021) A Data Transmission Method between the ROS-Based Robot and the Industrial Controller. Journal of Physics: Conference Series, 2029, 012003. https://doi.org/10.1088/1742-6596/2029/1/012003
- 12. 刘新悦, 汪永敏, 孙宇豪, 等. ROS机器人校园仿真场景设计与开发[J]. 福建电脑, 2023, 39(7): 78-83. https://doi.org/10.16707/j.cnki.fjpc.2023.07.016
- 13. 张雨晴, 吕程, 高金凤. 基于ROS系统的无人配送智能车设计[J]. 智能计算机与应用, 2023, 13(6): 126-129.
- 14. Hu, C., Dong, W., Yan, Y.H., et al. (2019) Runtime Verification on Hi-erarchical Properties of ROS-Based Robot Swarms. IEEE Transactions on Reliability, 69, 674-689. https://doi.org/10.1109/TR.2019.2923681
- 15. 茅晓亮, 滕佳赟, 张彦欢, 等. 基于ROS架构的中置开关柜值守机器人系统研究[J]. 传动技术, 2023, 37(2): 20-25.
- 16. 姜哲. 基于ROS的上肢外骨骼康复机器人的控制系统研究[D]: [硕士学位论文]. 济南: 山东建筑大学, 2023. https://link.cnki.net/doi/10.27273/d.cnki.gsajc.2023.000074
- 17. 孙正旺. 基于ROS通信机制的形式化建模与验证[D]: [硕士学位论文]. 上海: 华东师范大学, 2021. https://doi.org/10.27149/d.cnki.ghdsu.2021.002528
- 18. 邵壮. 兼容ROS的嵌入式实时机器人通信系统的设计与实现[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2018.