Geomatics Science and Technology
Vol.03 No.02(2015), Article ID:15093,6
pages
10.12677/GST.2015.32005
A Quickly Automatic Road Extraction Method for High-Resolution Remote Sensing Images
Lin Li1, Xiang Zhang2
1School of Remote Sensing and Information Engineering, Wuhan University, Wuhan Hubei
2Surveying and Mapping Institute of Jinan, Jinan Shandong
Email: LLSWEET23@126.com
Received: Mar. 26th, 2015; accepted: Apr. 11th, 2015; published: Apr. 17th, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
High-resolution images provide abundant surface details for users, so how to extract geographic objects with these details, to update geographic information database has become the issue of remote sensing information processing. This paper presents a fast automatic road extraction method of high-resolution remote sensing images. This approach, based on the fast image segmentation and line extraction, comprehensively utilizing the planar and linear feature information of the road, uses the judgment rule of planar road objects with sufficient line information and road objects with smaller shape index to extract and remove a road object. Experimental results show that this method can well extract conventional rural linear road and unconventional urban planar road.
Keywords:High-Resolution Remote Sensing Images, Automatic Road Extraction, Segmentation, Line Extraction
一种高分辨率遥感影像快速自动道路提取方法
李琳1,张翔2
1武汉大学遥感信息工程学院,湖北 武汉
2济南市勘察测绘研究院,山东 济南
Email: LLSWEET23@126.com
收稿日期:2015年3月26日;录用日期:2015年4月11日;发布日期:2015年4月17日

摘 要
高分辨率遥感影像为用户提供丰富的地表细节信息,而如何利用这些细节信息获取地理目标,更新地理信息数据库,是遥感信息处理研究的热点也是难点之一。本文提出了一种高分辨率遥感影像快速自动提取道路的方法,这种方法以影像的分割和线特征提取为基础,综合利用道路的面状特征和线状特征,并利用面状特征道路对象应具有足够数量的线特征信息以及道路对象应具有较小形状指数的判断原则来提取和剔除道路对象。实验结果表明,这种方法能够从影像中较好地提取乡村的常规线性道路和城区具有较多面状区域的非常规道路。
关键词 :高分辨率遥感影像,自动道路提取,分割,线特征提取

1. 引言
高分辨遥感影像目标自动识别是摄影测量与遥感技术发展的重点之一[1] ,从高分辨率影像中进行道路的自动和半自动提取研究也一直是研究的热点和难点。它对于数据更新、影像匹配、目标检测、数字测图自动化等应用意义重大 [2] ,是地形图和地理信息系统中的基本数据之一。
然而,随着遥感卫星的发展,遥感数据逐步呈现多源、多尺度、多时相、全球覆盖和高分辨率特征,数据量爆炸性增长,形成GB级、TB级和PB级的发展趋势 [3] ,这对数据的存储、处理、管理和应用提出了巨大的挑战。如何充分而有效地利用海量遥感影像数据进行道路提取,已成为研究人员需要解决的一个问题。
在高分辨率遥感影像中,道路同时具有线状特征和面状特征。道路一般呈现长条带状,有两条明显的边缘线且道路之间相互连接成道路网。目前高分辨影像的道路提取方法可分为两种:一种是基于直线和边缘的道路提取方法,另一种是基于影像分类和分割的方法。但由于高空间分辨率带来的“噪声”,导致有用边缘信息不明显,影像中非道路目标干扰、同谱异物和同物异谱现象以及复杂路面状况的影响,单独使用这两种方法提取道路,结果都不会十分理想。
本文提出了一种高分辨率遥感影像快速自动道路提取方法——W-L (Watershed-Line extraction)方法。这种方法综合利用了道路的面状特征和线状特征信息提取道路,并利用形状指数剔除非道路对象,即首先通过区域自适应分水岭方法对影像进行分割,利用线特征提取算法进行线特征提取,然后选取包含一定比例线特征信息的面状对象,剔除形状指数过大的对象,获得道路提取结果。实验结果证明该方法同时对乡村道路和城区道路表现出了较好的效果。
2. 快速自动道路提取方法
在高分辨率遥感影像中,道路表现为具有一定长度和宽度的面状地物,研究学者们提出了许多种道路提取的模型和方法,包括Snake模型方法 [4] 、水平集方法 [5] 、模板匹配方法 [6] 、Hough变换方法 [7] 、面向对象方法 [8] 和数学形态学方法 [9] 等,这些方法对于高分辨率影像存在一些不足:1) 受非道路因素影响严重;2) 道路特征利用不充分;3) 信息提取需要大量后处理工作。单个道路像元不能够完整表现道路特征,但若将同质像素集合即对象作为处理单元,则可以很好利用道路的光谱、形状和拓扑特征,其在实用性、准确性等方面较传统的方法有很大的提高。目前,道路提取很多都是基于多种方法融合进行,如Das等 [10] 利用多光谱道路图像的光谱特征和局部线性特征,结合概率支持向量机方法、局部梯度函数和垂直中轴转换方法以及主导奇异值方法进行区域分类、道路边缘检测、断裂道路连接和非道路对象剔除,虽然该方法被证实有很大的优越性,但是其只在光谱图像中效果较好,只可检测城区主干道,对建筑物或其他与道路灰度相似的区域提取困难。还有学者将数学上总变分的概念引入道路图像分割中,结合形态学开运算,实现道路提取 [11] 。该方法有较强稳定性,效果较好,但后处理时采用普通形态学开运算,易造成图像变形且剔除非道路对象效果不好。
为实现道路快速而自动地提取,W-L方法的合理性基于如下假设:线状地物的中心像元及其较小邻域内像元的灰度值明显异于其周围地物的灰度值,而且面状道路中总是包含具有线状特征的亮色地物,如道路的车道线、路中央的车辆及道路的边缘线等。这种方法旨在以较快速度构建并选择道路对象,并且在影像未经平滑和增强等额外处理的情况下仍能提取道路。
W-L方法从影像的面状道路分割和线状道路特征提取两个方面入手提取道路的信息,然后综合两个方面的信息获得包含一定比例线特征信息的面状对象,并利用对象的形状指数剔除非线状对象。道路提取方法的流程图如图1所示。
3. 分水岭分割和快速线特征提取
3.1. 区域自适应分水岭分割
区域自适应分水岭分割算法 [12] 利用高斯低通滤波和概率统计相结合的方法,对梯度影像进行区域自适应阈值分割,提取分割标记,然后采用Meyer算法进行标记分水岭分割。实验结果表明,这种算法能够有效抑制分水岭算法的过分割现象,对不同影像区域都有较好的分割效果。算法的实现步骤如下:
1) 阈值分割标记提取:用适当的阈值h对梯度影像进行阈值分割得到标记像元和待分割像元,具体过程如公式(1)所示。
 (1)
(1)
其中 为像元坐标,
为像元坐标, 表示梯度值,
表示梯度值, 为1表示像元为标记点,为0表示像元为非标记点。可以用h(a)作为分割阈值,a为标记像元所占的比例。例如,当a = 0.45时,表示标记像元占总像元的比例为45%。
为1表示像元为标记点,为0表示像元为非标记点。可以用h(a)作为分割阈值,a为标记像元所占的比例。例如,当a = 0.45时,表示标记像元占总像元的比例为45%。
2) 区域自适应调整:利用梯度影像通过低通滤波得到的区域性梯度趋势对初始经验统计阈值h进行修正得到最终阈值,如公式(2)所示。
 (2)
(2)
其中 为像元坐标,
为像元坐标, 为区域性梯度趋势,coef为
为区域性梯度趋势,coef为 的调整系数。
的调整系数。
3) 伪标记区域剔除:经过自适应阈值分割后会将所有像素点分为标记像素和待分割像素,区域增长方法将标记像素表述为具有一定面积的积水盆地。由于噪声和地物内部纹理的影响,原始标记影像会存在许多面积很小的伪标记区域,采用适当的面积阈值minArea剔除面积过小的伪标记区域,从而有效地抑制过分割现象。
4) 对影像进行标记分割:使用Meyer提出的基于不同优先级队列的直接分水岭变换方法对影像进行
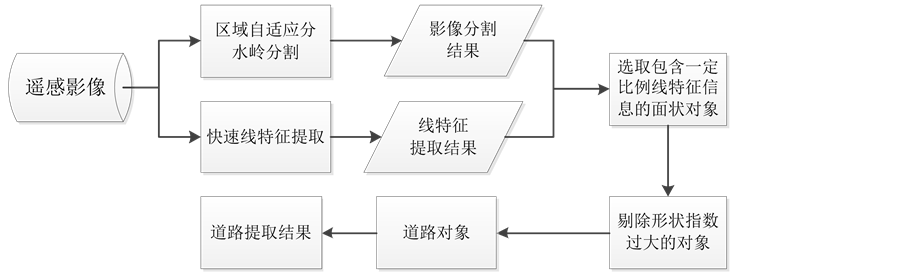
Figure 1. Flow chart of W-L method
图1. W-L方法流程图
分割。由于处理过程不需要对梯度重建,不需要对区域进行合并,优先级队列的内存动态分配且占用较小等优点,使得算法的时间效率和空间效率大大提高。
3.2. 快速线特征提取
邵元正等人提出了一种遥感影像快速线特征检测算法 [13] 。快速线特征探测器的方法在提取亮像元并将其存储到评价窗口的基础上,利用一种简单的评价准则判断像元是否为道路像元。实验结果表明,与Multiple Directional Non-Maximum Suppression (MDNMS)算法 [14] 相比,这种算法的检测速度更快,更能表现道路的细节并保持道路的完整性。算法的实现步骤如下:
1) 综合正交方向的检测结果:线特征检测结果既包含水平方向的检测结果,也包含垂直方向的检测结果。需要指出的是,算法使用一维窗口检测道路中心像元,影像的水平方向检测和垂直方向检测是分别独立进行的。这种一维的处理方式会提高算法的速度。
2) 初步提取道路中心像元:算法有3个参数,搜索窗口大小Ls,评价窗口大小Le及检测窗口大小Lb,Lb < Le < Ls。将搜索窗口中像素值最大的Le个像元放到评价窗口Sw中,并将检测窗口Tw中所有的像元与评价窗口中的像元进行比较:只有当 时,检测窗口的中心像元为道路像元。一般取Ls为3倍道路宽度,Le = 5,Lb = 3。
时,检测窗口的中心像元为道路像元。一般取Ls为3倍道路宽度,Le = 5,Lb = 3。
3) 剔除非道路特征并连接道路的断线:初步的检测的结果中不可避免地会出现多余的线特征,这些多余的特征既可能是非道路特征,也可能是路边种植树的阴影或遮挡造成的道路断线。算法通过设定适当的阈值剔除长度过短的线特征,并选择坡度系数最小的断线作为道路特征的延续,以对道路提取结果进行优化。
3.3. 形状指数
空间形状指数是一种应用广泛的空间形态分析指标,它通过计算地物图标与参照形状之间的偏离程度来衡量形状的复杂程度 [15] 。一维形状指数通常定义为地物图斑一维测度(如周长、长短轴、面积平方根等)的比值或者简单数学变换后的比值。形状指数能够反映地物图斑的几何形状,对分析地物的空间构造及区域景观的格局变化意义重大。
本文使用的形状指数I如下公式(3)所示:
 (3)
(3)
其中,S为对象的面积,P为对象的周长。正方形的形状指数为1/4。随着形状指数的减小,对象的线状特征也越来越明显。道路应该具有较小的形状指数。
3.4. 选取和剔除道路对象
经过影像分割和线特征提取后的遥感影像就是包含一定比例线特征信息的面对象,但是其中必然包括道路对象和非道路对象,而不能一概而论全为道路。因此需要进行道路对象的选取和剔除步骤,其原则包含以下两个方面:
1) 首先,作为面状特征的道路对象应具有足够数量的线特征信息,即对象中线特征点占对象总像元的比例应当不小于阈值P1。
2) 其次,道路对象应当具有较小的形状指数,当形状指数大于阈值P2时,应当将其归为非道路对象。
按照上述两个原则对影像分割结果进行判断,可以快速地从分割对象中选取道路对象,具体流程图可参见图2。其中,阈值P1和P2均是本算法中的参数,可以手动调节。由于道路和其他建筑物的形状区别主要表现在线性特征上,道路对象内部往往比其他建筑物中具有更多的线特征点,为了保证待选取的面对象中有足够多的线特征点,引入参数P1,计算如公式(4),L代表面对象中线特征点的个数,N代表面对象的总像元个数。
 (4)
(4)
此外,道路目标具有细长特征,而一般建筑物则常表现为长宽比值较小的方形,所以利用面积与周长比的形状指数I来区分道路目标和非道路目标,具体计算参见文章3.3节,道路对象的面积和周长比值一般会更小。
4. 实验结果与分析
本文从Google Earth中截取德国Schralzmaier地区2012年8月18日和德国Adendorf地区2009年1月1日的影像作为实验影像,检验W-L道路提取算法对乡村道路和城区道路的提取效果。两幅影像大小均为1400 × 900,分辨率小于1 m。原始影像如图3(a)和图3(b)所示,其中图3(a)代表乡村地区农田多且规整,道路简单的地区,图3(b)代表城市中房屋较多,道路网复杂的情况,道路提取结果如图3(c)和图3(d)所示。
两幅影像的区域自适应分水岭分割参数均为:a = 0.45,coef = 0.67,minArea = 50;线特征提取的参数均为:Ls = 15,Le = 5,Lb = 3;其他特征参数的过滤目前主要依据多组实验以获取较好的阈值,采用人工设定的方法。本实验中道路对象的线特征信息阈值P1设定为10%,形状指数阈值P2设定为0.1;在CPU为四核Intel Core 2处理器,主频为2 GHz,内存为2 GB的环境下,两幅影像的处理时间分别为:2359 ms和2453 ms。
由图3(c)和图3(d)可看出,无论是简单乡村道路还是复杂城市道路网,无论直线道路还是弯曲道路,该算法都能够较完整地提取出道路,结果较准确,可利用性高。总结道路提取算法的整个过程,其优点在于:1) 影像分割带来的优越性。通过最初的影像分割,可以很好地解决高分辨率影像噪声问题。因为这些噪声区域将和其周边的像元一起被融入到特定的影像区域中,而该影像区域在影像分析时属于同一对象。2) 多种特征综合考虑,可充分表现道路的各种光谱、形状和空间上的特征,尤其是几何特征和空间特征,这些特征和相关辅助信息的综合运用可以极大提高道路提取结果的质量。3) 提取速度快,该算法在分割过程中保留分水岭算法高效快速的优点,而且将大量的像素进行标记,无需再次进行分割,大大减少运算量,提高了计算速度,在线特征提取过程中运用了更简单的准则,实现快速而准确的提取。4) 省去影像增强等预处理操作。该算法是基于线状地物的中心像元及其邻域的灰度值总是大于周围像元的灰度值,而且面状道路中总是包含具有线状特征的亮色地物的假设基础上进行的,可以更大程度上进行快速自动提取道路。
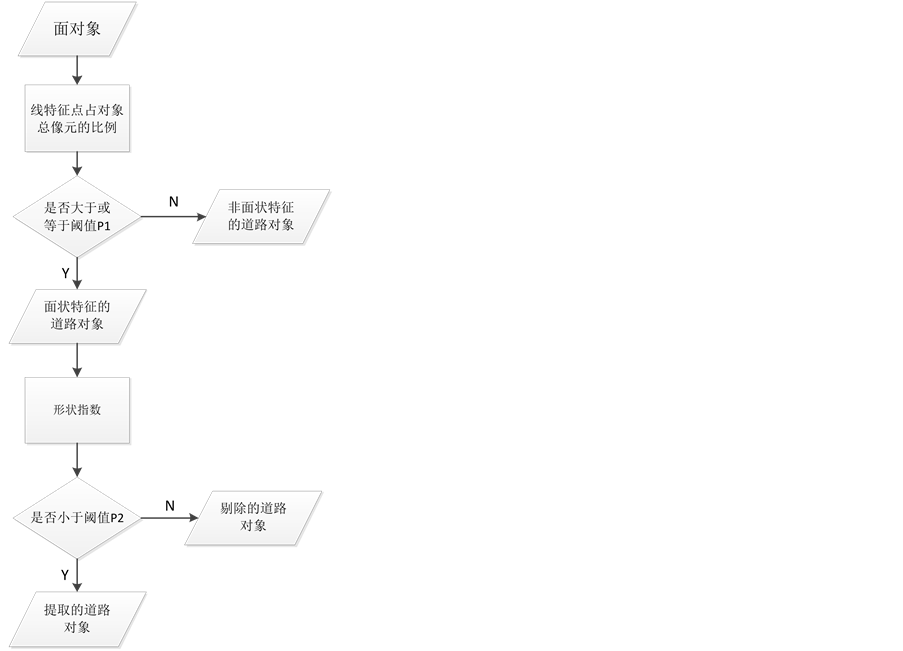
Figure 2. Flow chart of selecting and eliminating road objects
图2. 选取和剔除道路对象流程图

 (a) 德国Schralzmaier地区影像 (b) 德国Adendorf地区影像
(a) 德国Schralzmaier地区影像 (b) 德国Adendorf地区影像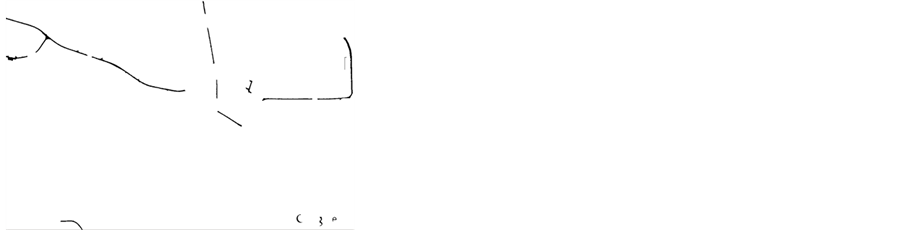
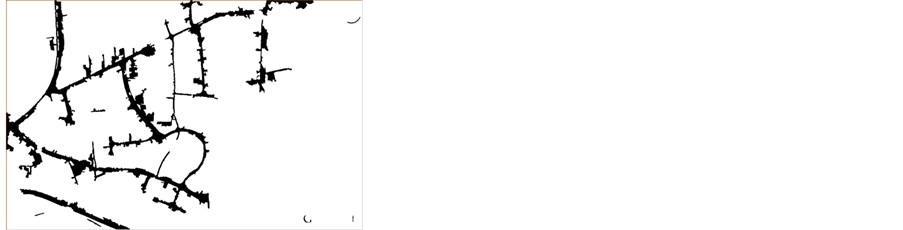 (c) 德国Schralzmaier地区道路提取结果 (d) 德国Adendorf地区道路提取结果
(c) 德国Schralzmaier地区道路提取结果 (d) 德国Adendorf地区道路提取结果
Figure 3. Experiment of road extracting
图3. 道路提取实验结果图
但是图3(b)中红线标记的部分是图3(d)提取结果中缺失的一段道路,这主要是因为该段道路受到路边树木阴影的严重干扰,导致实际道路的光谱特征近乎完全丢失,被误认为是非道路区域而被滤除掉了。此外,筛选阈值P1和P2的最佳组合需要经过大量的实验才能得到。针对本次实验,其值在±5%范围内变化时,对于道路提取结果都不会有太大影响,不会存在过多漏提取主干道路或误提取部分建筑物等现象,但是对于其他不同的分辨率影像还需要进行多组实验才能确定最佳阈值。
5. 结束语
本文提出了一种高分辨率遥感影像的快速自动道路提取方法(W-L方法)。该方法在对影像进行自适应分水岭分割和快速线特征提取的基础上,利用简单的判断原则来提取和剔除道路对象,使得道路提取更为迅速及自动化。从实验结果可以看出,这种方法对乡村常规线性道路和城区具有较多面状区域的非常规道路都有较好的效果,提取的道路对象不仅相互连通而且能够反映道路两旁的地物分布情况,从而增加了道路提取结果的信息量,使其更加贴近于实际情况。
基金项目
民用航天“十二·五”预先研究项目基金(No. 2013669-7)资助。
文章引用
李 琳,张 翔, (2015) 一种高分辨率遥感影像快速自动道路提取方法
A Quickly Automatic Road Extraction Method for High-Resolution Remote Sensing Images. 测绘科学技术,02,27-33. doi: 10.12677/GST.2015.32005
参考文献 (References)
- 1. 李德仁 (2008) 摄影测量与遥感学的发展展望. 武汉大学学报•信息科学版, 12, 1211-1215.
- 2. 史文中, 朱长青, 王昱 (2001) 从遥感影像提取道路特征的方法综述与展望. 测绘学报, 3, 257-261.
- 3. 吕雪锋, 程承旗, 龚健雅, 关丽 (2011) 海量遥感数据存储管理技术综述. 中国科学: 技术科学, 12, 1561-1573.
- 4. Tang, W. and Zhao, S.H. (2011) Road extraction in quaternion space from high spatial resolution remote sensed images basing on GVF Snake model. Journal of Remote Sensing, 15, 1040-1052.
- 5. Lu, B.B., U, Y.X. and Wang, H. (2009) Automatic road extraction method based on level set an shape analysis. Intelligent Computation Technology and Automation, Changsha, 511-514.
- 6. Lin, X.G., Hang, J.X., Heng, J., et al. (2009) Semiautomatic road tracking by template matching and distance transform. Urban Remote Sensing Event, Shanghai, 1-7.
- 7. Zhang, L.J., Zhang, J., Hang, D.P., et al. (2010) Urban road extraction from high resolution remote sensing images based on semantic model. 2010 18th International Conference on Geoinformatics, Beijing, 18-20 June 2010, 1-5.
- 8. 李晓峰, 张树清, 韩富伟, 秦喜文, 于欢 (2008) 基于多重信息融合的高分辨率遥感影像道路信息提取. 测绘学报, 2, 178-184.
- 9. Mena, J.B. (2003) State of the art on automatic road extraction for GIS update: A novel classification. Pattern Recognition Letter, 24, 3037-3058.
- 10. Das, S., Mirnalinee, T. and Varghese, K. (2011) Use of salient features for the design of a multistage framework to extract roads from high-resolution multispectral satellite images. IEEE Transactions on Geoscience and Remote Sensing, 49, 3906-3931.
- 11. 李书晓, 常红星 (2007) 基于总变分和形态学的航空图像道路监测算法. 计算机学报, 2, 2173-2180.
- 12. 巫兆聪, 胡忠文, 欧阳群东 (2011) 一种区域自适应的遥感影像分水岭分割算法. 武汉大学学报•信息科学版, 3, 293-296.
- 13. Shao, Y.Z., Guo, B.X., Hu, X.Y. and Di, L.P. (2011) Application of a fast linear feature detector to road extraction from remotely sensed imagery. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 4, 626-631.
- 14. Sun, C. and Vallotton, P. (2006) Fast linear feature detection using multiple directional non-maximum suppression. IEEE International Conference on Pattern Recognition, 2, 288-291.
- 15. Hulshofrm (1995) Landscape indices describing a Dutch landscape. Landscape Ecology, 10, 101-111.