Computer Science and Application
Vol.4 No.09(2014), Article ID:14128,7 pages
DOI:10.12677/CSA.2014.49030
An Escalator Security Performance Instruction Based on the Kalman Filter Algorithm
1Chongqing Special Equipment Inspection Institute, Chongqing
2College of Opto-Electronic Engineering, Chongqing University, Chongqing
Email: *weibiao@cqu.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Jul. 20th, 2014; revised: Aug. 18th, 2014; accepted: Aug. 26th, 2014
ABSTRACT
To detect escalator safety parameters fast and accurately, an intelligent automatic escalator safety parameter test instrument is designed. The instrument is using the incremental photoelectric encoder as the sensor and the STM32 processor as the minimum system in order to measure braking distance, handrails, cascade speed, the synchronization rate and acceleration parameters. The test results show that, the relative error between escalator speed estimation and acceleration estimation does not exceed the industry standard which is 10%.
Keywords:Escalator, Kalman Filter Algorithm, Security Performance, Detector

一种基于卡尔曼滤波算法的智能型
自动扶梯安全性参数测试仪
陈 杰1,郑徐豪2,吴德操2,唐跃林1,冯 鹏2,蒲 晒1,魏 彪2*
1重庆市特种设备检测研究院,重庆
2重庆大学,光电工程学院,重庆
Email: *weibiao@cqu.edu.cn
收稿日期:2014年7月20日;修回日期:2014年8月18日;录用日期:2014年8月26日

摘 要
针对自动扶梯或自动人行道自动扶梯安全性参数检测的快速、准确需要,采用增量式光电编码器为传感检测单元,以STM32处理器为最小系统,基于卡尔曼滤波算法,本文设计了一种智能型自动扶梯安全性参数测试仪,以此对自动扶梯制停距离、扶手带和梯级速度及其同步率和加速度等安全性能参数进行实时测量。测试结果表明,测试仪的自动扶梯速度估计和加速度估计相对误差未超出10%的行业规范性要求。
关键词
自动扶梯,安全性参数,增量式光电编码器,卡尔曼滤波算法

1. 引言
毋庸置疑,随着社会经济的发展激发了人们对日常生活便捷性和舒适性的渴望,在室内外大型公共场所,自动人行道自动扶梯或自动扶梯作为一种便捷、舒适的交通工具已屡见不鲜,且还呈快速增长的趋势。然而,随之而来的却是自动扶梯安全事故偶有发生,由此造成了人员伤亡或财产损失,且也呈明显上升趋势[1] 。为此,人们对自动扶梯的安全性甚为关切,我国新近颁布了《自动扶梯和自动人行道的制造与安装规范》(GB16899-2011)国家标准[2] ,新增和改进了对自动扶梯和人行道检测检验的许多要求,其中,对自动扶梯扶手带与踏板、梯级的速度同步率检测还作了强制性规定。可见,快速、准确、直观的自动扶梯安全性参数测试仪已是内在或必然要求。
诚然,我国目前虽有一些自动扶梯安全性参数测试仪,例如,XC-10F电梯限速动作速度测试仪等,但其大多尚采用人工方法[3] ,工效低,准确率不高。国内有关单位,虽然引进了日本小野EC-2100电梯专用转速表测试仪,适用于电梯、升降机的调试、维修和控制,但该仪器超出±999 mm以上的数值精度不能保证。
有鉴于此,本文基于卡尔曼滤波算法,开展了智能型自动扶梯安全性能测试仪原理研究与仪器开发工作,以此实现自动扶梯的制停距离、制停过程减速度、扶手带或梯级速度等安全性参数实时检测,最大限度防范自动扶梯本身安全性问题造成人员伤亡或财产损失事故的发生。
2. 仪器组成及基本原理
基于卡尔曼滤波算法的智能型自动扶梯安全性能测试仪,其系统总体设计包括自动扶梯安全性检测参数的采集、传输、处理与分析等,如图1所示。增量式光电编码器作为传感单元系是自动扶梯安全性信号采集模块(四倍频电路),检测扶手带、踏板、梯级的位移信号,输出脉冲信号,传输进入以STM32F407为核心的嵌入式系统,且对脉冲计数进行离散卡尔曼滤波信号处理,进而实现自动扶梯安全性能判断、显示和数据存储。
增量式光电编码器测量自动扶梯速度通常由测频法(M法)、测周法(T法)或M/T法实现[4] [5] 。为实现自动扶梯安全性参数的自动、实时检测与分析(智能型),在采用增量式光电编码器对自动扶梯安全性参数如位移、速度和加速度等检测的同时,需对自动扶梯的位移、速度和加速度信号进行降噪、控制延迟、精度估计等实时处理与分析。本文采用了一种卡尔曼滤波算法。卡尔曼滤波器是基于如式(1)和(2)动力学
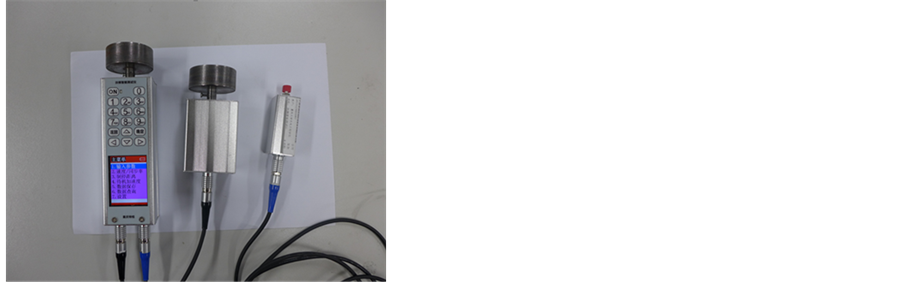
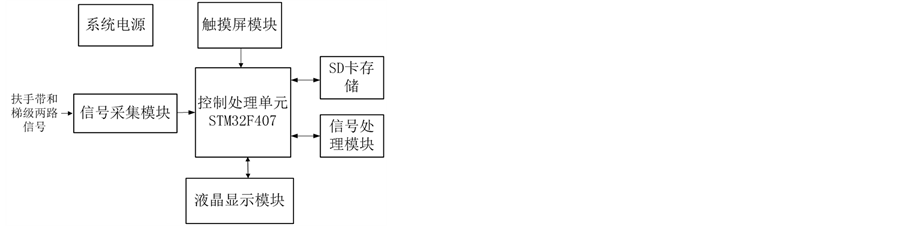
(a) 原理框图 (b) 实物外观图
Figure 1. Safety performance testing instrument system of escalator
图1. 智能型自动扶梯安全性能测试仪器系统
方程随机的离散时间模型而得到的。
 (1)
(1)
 (2)
(2)
式中,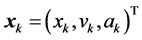 ,
, 为测量位移,
为测量位移, 为速度,
为速度, 为加速度;A和H分别为
为加速度;A和H分别为 的状态转移矩阵和观察矩阵,如式(3)所示。
的状态转移矩阵和观察矩阵,如式(3)所示。
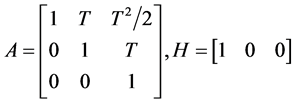 (3)
(3)
G为单位矩阵, 是表示式(1)过程噪声向量,其协方差矩阵
是表示式(1)过程噪声向量,其协方差矩阵 为式(4)所示。
为式(4)所示。
 (4)
(4)
于是, ,因为实际的运动过程不能很好表征为平稳随机过程,所以必须调整q参数以更好描述运动系统的模型。
,因为实际的运动过程不能很好表征为平稳随机过程,所以必须调整q参数以更好描述运动系统的模型。
 为均值为零的高斯白噪声测量误差信号,其测量误差的方差可以由增量式光电编码器量化因子定义:
为均值为零的高斯白噪声测量误差信号,其测量误差的方差可以由增量式光电编码器量化因子定义:
 (5)
(5)
 (6)
(6)
式中,N为增量光电编码器的分辨率(每转一圈的输出脉冲数)。
因此,经过推导[5] ,离散时间卡尔曼滤波算法可表示为:
当前信号预测:
 (7)
(7)
预测误差协方差矩阵:
 (8)
(8)
卡尔曼增益:
 (9)
(9)
迭代更新:
 (10)
(10)
 (11)
(11)
由此可见,采用卡尔曼滤波算法能对自动扶梯安全性参数同时进行位移估计、速度估计和加速度估计,大大减少了运算的复杂度,避免了用离散差分方法求速度和加速度,提高了自动扶梯的安全性能参数检测精度。
3. 仪器硬件电路设计
3.1. STM32处理器最小系统设计
本文采用意法半导体公司的STM32系列处理器STM32F407芯片[6] 。STM32F407是在很小的封装内实现高集成度、高性能、内嵌存储器和具有丰富的外设的处理器,广泛应用于医疗、工业与消费类电子产品等场合。构造STM32最小系统,必须有电源供应、复位电路、振荡器电路、调试端口,如图2所示。
3.2. 数据采集处理电路设计
数据采集处理电路是由光电编码器四倍频电路和STM32F407内置计数器模块组成,如图3所示。增
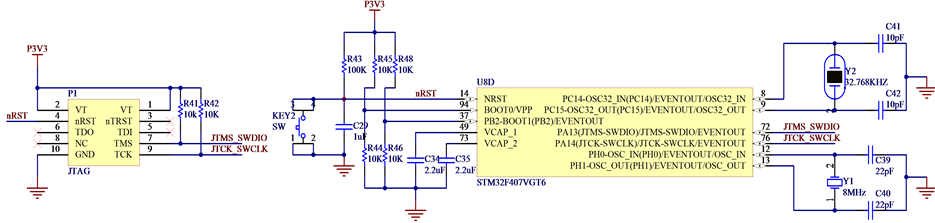
Figure 2. The schematic diagram of STM32 Minimum System
图2. STM32处理器最小系统设计原理图
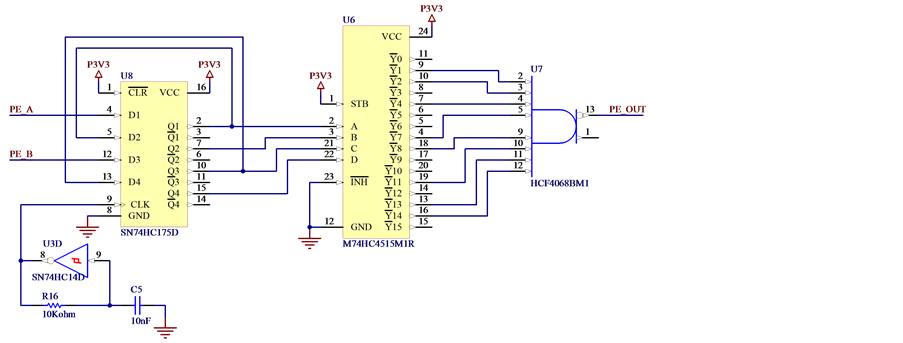
Figure 3. The quadruplicated frequency circuit in optical encoder
图3. 光电编码器四倍频电路原理图
量式光电编码器系为四倍频电路,具有消除误脉冲和提高分辨率功能,它的A相、B相连接到具有含有四个D触发器的器件SN74HC175D,尔后通过4-16译码器M74HC4515M1R,最后A相、B相的四倍频脉冲信号,输出脚为PE_OUT。
数据采集的基本工作过程是:设由反相器U3D、电阻R16电容C5组成的高频脉冲信号周期为T,当编码器为正向旋转时,在A相的一个周期内,A(Q1)、B(Q2)、C(Q3)、D(Q4)输出的波形图,如图4所示。因D触发器的性质和SN74HC175D中D1、D2处于级联方式,当高频脉冲上升沿到来,Q1跳跃为正电平时,Q2要等到下一个高频脉冲的到来才跳跃到正电平,所以导致Q1滞后Q2一个周期T。对于滞后A相90˚的B相,情况类似。由图4可知,在Q1的一个周期内,4-16译码器M74HC4515M1R的 等脚能产生的四个低电平脉冲,同理,当编码器为方向旋转时,译码器M74HC4515M1R的
等脚能产生的四个低电平脉冲,同理,当编码器为方向旋转时,译码器M74HC4515M1R的 等脚能产生的四个低电平脉冲,从而实现光电编码器的四倍频。
等脚能产生的四个低电平脉冲,从而实现光电编码器的四倍频。
4. 卡尔曼滤波算法程序设计
实际上,自动扶梯安全性检测就是对自动扶梯的制停距离、运行速度和加速度进行估计。因此,安全性检测的数据处理程序就是对由增量式光电编码器传感单元采样到的位移信号进行处理。STM32F407处理器以采样周期为T对增量式光电编码器进行采样,得到k时刻的采样位移量 ,尔后对所得采样点进行卡尔曼滤波[7] ,从而得到速度和加速度估计信息,其流程图如图5所示。步骤如下:
,尔后对所得采样点进行卡尔曼滤波[7] ,从而得到速度和加速度估计信息,其流程图如图5所示。步骤如下:
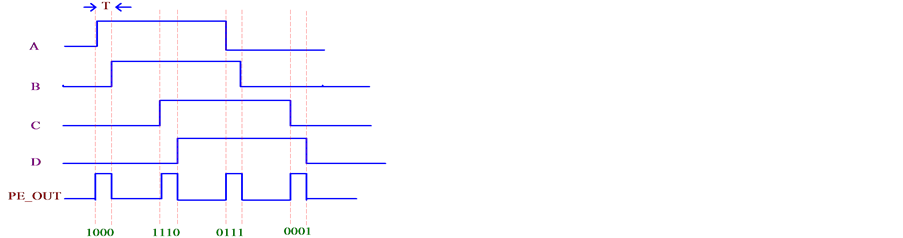
Figure 4. The timing waveform of quadruplicated frequency circuit
图4. 光电编码器四倍频电路时序波形图
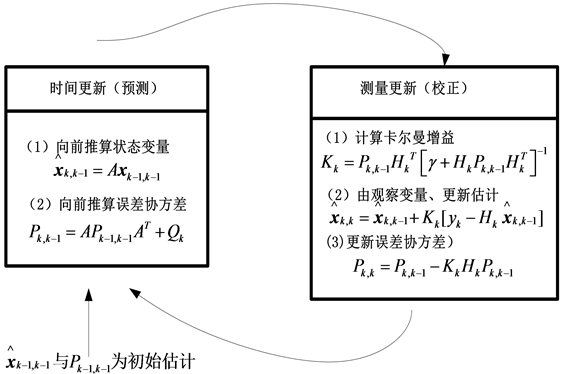
Figure 5. Flow chart based on Kalman filter algorithm
图5. 基于卡尔曼滤波算法的流程图
1) 用k-1时刻的最优系统状态值 ,预测k时刻的系统状态值
,预测k时刻的系统状态值 ;
;
2) 用上一次的误差协方差 和过程噪声
和过程噪声 ,预测新的误差
,预测新的误差 ;
;
3) 计算卡尔曼增益 ;
;
4) 校正更新,新的系统状态值 ,此时,
,此时, 为k时刻的最优系统状态值;
为k时刻的最优系统状态值;
5) 为下一步估计 时刻的最优系统状态值计算更新
时刻的最优系统状态值计算更新 值。
值。
5. 测试结果与讨论
本文增量式光电编码器传感单元,采用的是光洋电子的TRD-MX100A,其输出脉冲为每转1000个脉冲,装入测速轮(如图1实物外观所示)。被测物体为运动的传送带,其由电机及变频调速控制器控制,初始速度为0,加速度为0.8 m/s2,每隔10 ms对传送带的位移进行采样,采样100个点;将此100个采样点采用卡尔曼滤波算法对传送带位移、速度和加速度进行估计,得到位移估计曲线、速度估计曲线和加速度估计曲线,其分别如图6,图7和图8所示。
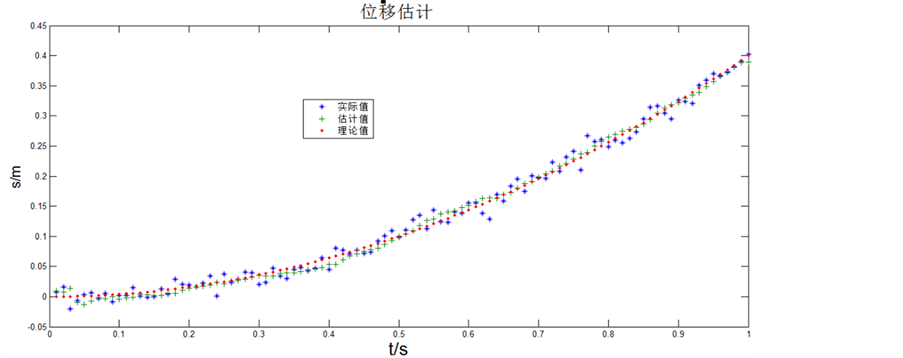
Figure 6. The curves of displacement estimation based on Kalman filter algorithm
图6. 基于卡尔曼滤波算法的自动扶梯位移估计曲线
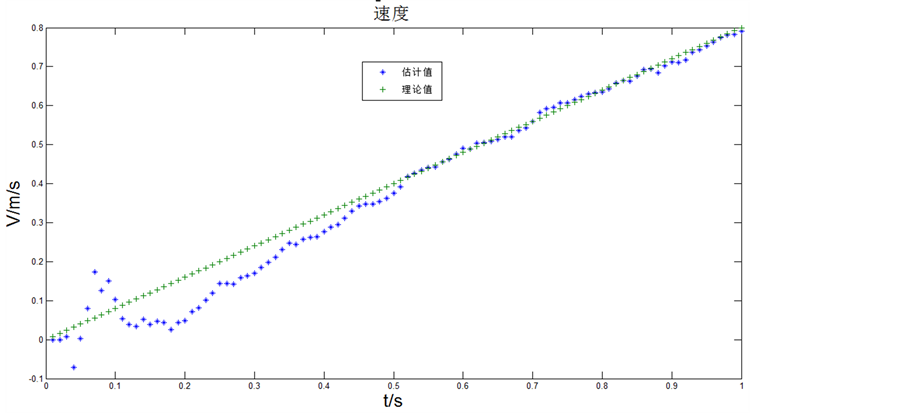
Figure 7. The curves of velocity estimation based on Kalman filter algorithm
图7. 基于卡尔曼滤波算法的自动扶梯速度估计曲线
针对上述基于卡尔曼滤波算法的自动扶梯位移估计、速度估计和加速度估计结果进行误差分析,得到了参数估计标准偏差,如表1所示。可知,在误差允许范围内,由卡尔曼滤波算法估计的数据较精确,满足仪器系统设计要求。此外,为验证所设计仪器的速度和加速度相对误差,对检测仪进行了速度和加速度的验证,结果如表2和表3所示。可以看出,本检测仪基本满足了预期设计指标,即检测相对误差小于10%的行业规范性要求[8] 。
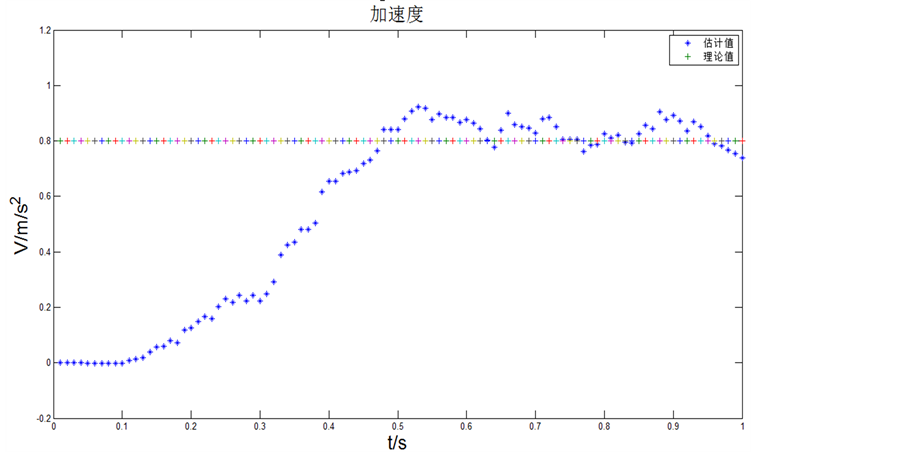
Figure 8. The curves of acceleration estimation based on Kalman filter algorithm
图8. 基于卡尔曼滤波算法的自动扶梯加速度估计曲线

Table 1. Standard deviation of escalator parameters estimation
表1. 自动扶梯安全性参数估计标准偏差一览表
Table 2. Index verification of escalator velocity
表2. 自动扶梯速度指标验证结果一览表
Table 3. Index verification of escalator acceleration
表3. 自动扶梯加速度指标验证一览表
6. 结论
本文针对自动扶梯或自动人行道自动扶梯安全性参数检测的快速、准确需要,设计了一种智能型自动扶梯安全性参数测试仪,测试结果表明,测试仪的自动扶梯速度估计和加速度估计相对误差未超出10%的行业规范性要求,这对自动扶梯避免可能发生人员伤亡或财产损失具有重要的实用意义。其结果或结论是:
1) 采用增量式光电编码器为传感检测单元,获得了自动扶梯的运行速率、同步率等安全性参数。
2) 以STM32处理器为最小系统,实现了自动扶梯的安全性参数检测的快速及智能化。
3) 基于卡尔曼滤波算法,借以对自动扶梯制停距离、扶手带和梯级速度及其同步率和加速度等安全性能参数进行实时性测量。
基金项目
重庆市安全生产监督管理局安全生产事故预防科技项目(CQAWS2013Y-010)和重庆市质量技术监督局科技计划项目(KY201201)联合资助。
参考文献 (References)
- [1] 袁桂芳, 曹丹琪 (2004) 自动扶梯扶手带与梯级运行速度允差的快速判定. 中国设备工程, 4, 27.
- [2] 上海三菱电梯有限公司, 江南嘉捷电梯股份有限公司, 中国建筑科学研究院建筑机械化研究分院, 等 (2011) 自动扶梯和自动人行道的制造与安装安全规范.
- [3] 国家标准化委员会 (2006) TSG T7005-2012, 电梯监督检验和定期检验规则——自动扶梯与自动人行道.
- [4] 袁鹏程,张伟峰 (2012) 改进的M/T法在电机测速中的应用. 轻工机械, 1, 59-62.
- [5] 吴战国, 李洪雷, 王升超 (2011) 自动扶梯桁架焊接变形分析与控制纠正. 中国工程机械学报, 3.
- [6] 陈伯时 (2011) 自动扶梯系统的参数设定及PLC程序设计. 硕士论文, 同济大学, 上海.
- [7] 薛成超 (2012) 自动扶梯参数化设计系统框架构建及若干模块的开发. 硕士论文, 东北大学, 沈阳.

NOTES
*通讯作者。