Mechanical Engineering and Technology
Vol.
07
No.
05
(
2018
), Article ID:
27025
,
7
pages
10.12677/MET.2018.75036
Optimization Analysis of Six-Degree-Freedom Robot Virtual Assembly Structure
Li Liu, Guangzhu Chen, Yi Deng, Zhe Liu
Chengdu University of Technology, Chengdu Sichuan

Received: Aug. 27th, 2018; accepted: Sep. 22nd, 2018; published: Sep. 29th, 2018

ABSTRACT
Industrial robots are usually composed of a series of linkage, joint, or other forms of motion. During the development of manufacturing, industrial robots include machine seats, vertical posts, lumbar joints, arms joints, wrist joints and claws. The multi-degree freedom robot has the advantages of smooth transmission, high speed adjustment, strong bearing capacity and wide range of space. This paper uses 3D modeling to design and analyze it. Using Solidworks software to complete the overall design of six degrees of freedom industrial robot, the whole virtual prototype model of the robot was established. A simulated explosion diagram of six degrees of freedom robot was generated. The structure assembly relationship of six degrees of freedom robot can be obtained from the explosion diagram. The robot joint mechanism can be analyzed and optimized fully.
Keywords:Six-Degree-Freedom Robot, Virtual Assembly, Solidworks, Explosion Diagram, Joint Mechanism
六自由度机器人虚拟装配结构优化分析
刘漓,陈光柱,邓毅,刘哲
成都理工大学,四川 成都
收稿日期:2018年8月27日;录用日期:2018年9月22日;发布日期:2018年9月29日

摘 要
工业机器人一般由一系列的连杆、关节或其他形式的运动副组成。在制造业的发展过程当中,工业机器人包括机座、立柱、腰关节、臂关节、腕关节和手爪。多自由度机器人具有传动平稳、调速范围大、承载能力强、空间范围广等优点。本文运用三维建模对其进行设计分析。运用Solidworks软件完成六自由度工业机器人的总体设计,建立了机器人的整体虚拟样机模型。生成了六自由度机器人的模拟爆炸图。从爆炸图中可得到六自由度机器人的结构装配关系。运用ADAMS软件可全面清晰的对机器人关节机构进行分析和优化。可得出静力学与动力学分析结果。本文采用ANSYS Workbench对已装配好的六自由度机器人进行Response Spectrum分析。
关键词 :六自由度机器人,虚拟装配,Solidworks,爆炸图,关节机构

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
虚拟装配技术运用于制造业生产过程中,随着机械工业在国民经济中发挥重要作用。传统的设计装配方法在实际生产过程中已不能满足要求。为提高装配效率,防止在装配过程当中出现干涉现象。采用三维建模平台,对六自由度机器人关节进行详细的结构分析。机械制造装配在虚拟平台上的运用可解决在生产过程中的技术问题。Solidworks软件对六自由度机器人进行了结构校验。在CAD/CAM软件平台中进行产品的设计与更新。ADAMS中得出产品的简化装配关系,为深入研究静态与动态模型分析提供基础。此装配过程当中,需要熟悉装配的相对位置、配合方式、允许的误差等。
机器人的出现和发展推动了现代的人工智能制造产业,德国KUKA机器人、日本川琦机器人的问世,机器人学和机器人技术得到了各界的广泛关注 [1] 。对工业机器人的研究逐步发展到视觉、触觉功能,能够进行独立操作,运用于各行各业。机器人的运用范围遍及科技、工业、服务等各个领域。机器人结构形式包括笛卡尔坐标结构、柱面坐标结构、极坐标结构、球面坐标结构等。本文设计的六自由度工业机器人属于关节式球面机器人。通过虚拟样机技术进行了模型结构的简洁化处理。
2. 虚拟装配平台
2.1. 虚拟装配的现代化应用
日益广泛的产品市场投入,为了在全球化的环境中保持竞争力,制造业需要不断发展其生产系统,适应市场不断变化的需求 [2] 。在产品的制造智能化过程中,人机交互技术在虚拟现实当中的发展,提出面向过程的虚拟装配建模方法 [3] 。由虚拟平台衍生出的虚拟装配技术DFA (Design For Assembly),AR技术在生活中的体验,展现了在虚拟三维空间当中,置身于虚拟环境。虚拟装配使得本课题研究的六自由度机器人更加清楚的展现装配过程。通过软件平台制作出产品的虚拟实体效果,于虚拟平台进行现代化产业的运用。虚拟图像的出现,在空间装饰中得以运用。在虚拟的环境里面,可以的到不同的体验。
2.2. 六自由度虚拟设计
据机械设计基础理论,结合连杆自由度计算公式N = 3TS − 2T − TH。能够实现具有六个自由度的机器人,设计出拟人式的空间六自由度机器人,得到仿人型机器人。运用机械传动理论知识,把动力传递给运动末端机构,设计出可实现六自由度运动的机器人。在考虑设计方法的过程当中,采用链条式传动以及电磁阀的转动可达到目的。为实现六自由度机器人具有相当的承载能力,保证机器人传动的可靠性。用ANSYS Workbench软件进行了分析,得到了Scale Factor为0.8的分析结果。研究分析结果体现了装配制造的准确性,在保证传统的同轴心,结合机械原理理论,装配出具有良好工作性能的机器人。
3. 机器人关键部件
3.1. 关键关节三维爆炸图
爆炸图可以看出关节的具体组成部分,修改详细的零件部。图中我们可以看到机械的力从电机传动到机器人大臂。Solidworks软件打开爆炸图命令,使用坐标拖动部件到相应位置,可以观察到关节的详细情况。键连接可增加电机轴与联轴器之前的紧密性。经过滚动轴承减小轴向和径向的受力 [4] 。爆炸图见图1在工程上的应用体现在熟悉产品内部结构,详尽的表现出产品的设计理念。直观的得到产品的结构模拟图像。帮助人员在整体模型的基础上,简单的得出所要装配的部件数量。快速得出装配的连接关系。三维爆炸图加入产品说明内,帮助用户理解产品的相关内容,解决装配中的各种问题。
3.2. 机器人装配干涉
设计六自由度机器人的过程中,明确装配关系。改进关节设计的结构。防止出现零部件之间产生干涉现象。装配人员在组装的时候,出现零部件间无法配合,设计部件无法组装。对装配顺序比较混乱等问题。通过在虚拟平台装配的过程当中模拟出装配过程,在实际组装过程中减少了装配的时间,减少了劳动力的浪费。装配干涉现象在实践中常有发生,这就需要研发设计人员在虚拟平台当中进行检查,以防止出现问题。软件平台出现未发生干涉现象。实践过程出现装配误差,这还需要设计人员进行详细的结构分析。依靠制造装配经验中,得出机械产品出现的特殊干涉现象。
产品零部件设计→产品组装配合→校验产品的干涉→优化的设计。
4. ADAMS简化模型
在ADAMS软件里面,把基座固定,可看到腰部关节和大臂之前的旋转关系。大臂与小臂,小臂与
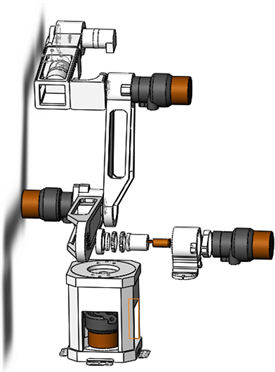
Figure 1. Three-dimensional explosion diagram
图1. 三维爆炸图
手部,以及末端关节部分添加载荷情况见图2所示。ADAMS命令中通过import命令加载Solidworks所建立的三维模型。把相应部分组成一个模块。可加入关节之间的变换关系。ADAMS分析机构的速度、加速度、力矩生成相应的曲线图形。软件应用于多刚体动力学的分析。ADAMS/View是ADAMS系列产品的核心模块之一,采用人机交互界面,用户可以在仿真分析的层面上进行优化,拓扑和形状优化应用于机器人的装配设计。仿真过程没有反应真实世界中零部件装配运动的本质规律的问题,提出虚拟装配中多刚体动力学的物性装配过程仿真方法 [5] 。
5. 装配体Harmonic Response分析
5.1. 谐响应分析过程
六自由度机器人装配好后,得到所建立连杆模型总变形量,见图3所示。利用ANSYS Workbench的谐响应分析命令,设置六自由度机器人连杆机构的频率以及加速度,见图4。可得到连杆的谐响应分析结果。引入建立好的三维模型,进入Machanical界面,运用了Coarse网格划分,计算机运行Generate Mesh命令,可得到六面体结构的机器人连杆的划分结果。本文运用了普通Structural Steel材料。在Model里面进行Total Deformation的分析,可得到连杆的动画演示变化状态。在模型分析的过程当中,得到了多阶振型模态,分析结果谐响应的最大值为3.2301e−6。
5.2. 谐响应分析研究意义
六自由度机器人利用运动学和动力学分析结果,得出在减轻材料的同时,可得到的高负载的最佳装配效果。装配的精确定位可增加机器人的运行寿命。减少六自由度机器人在运行过程当中出现的由于装
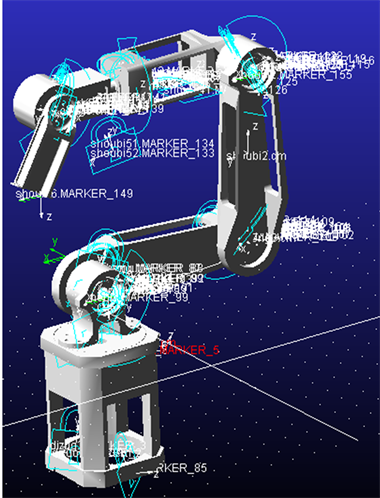
Figure 2. Simplified analysis model
图2. 简化分析模型
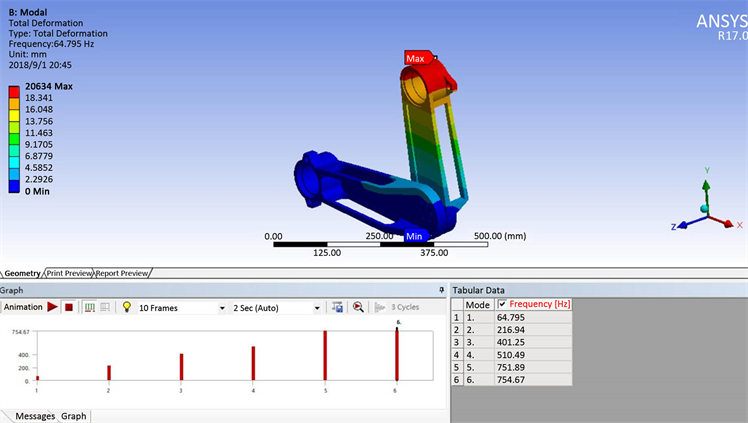
Figure 3. Deformation of connecting rod
图3. 连杆变形量

Figure 4. Loading frequency acceleration
图4. 加载频率加速度
配不合理,引起的安全隐患 [6] 。采用Bonded或者Frictional装配的不同方式得出的不同效果。使得在实际装配的过程当中,我们可以直接运用分析合理的装配连接方式,对六自由度机器人进行装配。谐响应分析结果见图5。

Figure 5. Analysis results of harmonic response
图5. 谐响应分析结果
6. 结论
本文是通过对六自由度机器人建立产品设计模型,对其结构进行分析。研究了机器人连杆机构的连接关系。对其进行虚拟装配。使其技术人员在装配的过程当中明确了装配顺序。在以后的产品更新之中,起到了基础装配的作用。ADAMS分析软件引入可让六自由度机器人的结构更加简洁。在运动学和动力学分析过程当中,简化模型得到需要的分析数据。再采用谐响应分析结果,可得到连杆机构装配设计的合理性。现代的虚拟装配技术在ANSYS Workbench中可得到直观的结果,利用结构性能的分析,得到更好的产品设计方法。
文章引用
刘 漓,陈光柱,邓 毅,刘 哲. 六自由度机器人虚拟装配结构优化分析
Optimization Analysis of Six-Degree-Freedom Robot Virtual Assembly Structure[J]. 机械工程与技术, 2018, 07(05): 291-297. https://doi.org/10.12677/MET.2018.75036
参考文献
- 1. 蒋刚, 刘念聪, 龚迪琛, 等. 工业机器人[M]. 成都: 西南交通大学出版社, 2010.
- 2. Pedersen, M.R., Nalpantidis, L., Anderson, R.S., et al. (2016) Robot Skills for Manufacturing: From Concept to Industrial Deployment. Robotics and Computer-Integrated Manufacturing, 37, 282-291. https://doi.org/10.1016/j.rcim.2015.04.002
- 3. 刘振宇, 谭建荣. 面向过程的虚拟环境中产品装配建模研究[J]. 中国机械工程, 2004, 40(3): 93-1699.
- 4. 袁清柯. 现代设计方法与产品开发[M]. 北京: 电子工业出版社, 2010.
- 5. 张志贤, 刘检华. 虚拟装配中基于多刚体动力学的物性装配过程方针[J]. 机械工程学报, 2013, 49(5): 90-94.
- 6. 李慧, 马正先. 机械零部件结构设计实例与典型设备装配工艺性[M]. 北京: 化学工业出版社, 2015.