Transmission and Distribution Engineering and Technology
Vol.
09
No.
01
(
2020
), Article ID:
33817
,
7
pages
10.12677/TDET.2020.91001
Research on Point Cloud Registration Algorithm Based on Fast Extraction of Electric Tower
Jiahui Yang1*, Hao Wang1, Lingmeng Fan2, Chang Liu2
1Digital Grid Research Institute, CSG., Guangzhou Guangdong
2China Southern Power Grid Company Limited, Guangzhou Guangdong

Received: Dec. 17th, 2019; accepted: Dec. 30th, 2019; published: Jan. 6th, 2020

ABSTRACT
With the development of technology, power network data acquisition based on UAV aerial photography and laser scanning plays an increasingly important role in power network construction, especially in power line patrol and tree barrier analysis. At the same time, with the updating of data acquisition equipment, the number of point cloud data points is also growing. Aiming at the problem that the data volume is too large during the registration of dense matched point clouds or LiDAR point clouds, a voxel-based point cloud simplification method is proposed in this paper. The point cloud is simplified by representing the voxel by its barycenter computed from the point cloud. The fast registration of tower data is realized by combining the simplified point cloud with the fast point feature histogram (FPFH) algorithm and the iterative nearest neighbor point algorithm (ICP). Experimental results show that this method can effectively improve the registration speed without losing the registration accuracy.
Keywords:Voxel Grid, Point Cloud Registration, Power Line Inspection

基于电塔快速提取的点云配准算法研究
杨家慧1,王昊1,樊灵孟2,刘昌2
1南方电网数字电网研究院有限公司,广东 广州
2中国南方电网有限责任公司,广东 广州

收稿日期:2019年12月17日;录用日期:2019年12月30日;发布日期:2020年1月6日

摘 要
随着技术发展,基于无人机航摄与激光扫描的电网数据采集方式在电网建设中,尤其是电力巡线、树障分析等工作中具有越来越重要的地位。同时随着数据采集设备的更新换代,点云数据量点数也越来越大。本文针对倾斜密集点云与激光扫描点云在点云配准时点云数量过大的问题,提出一种体素化点云简化的方法。通过将点云体素化后计算出的体素重心来代表体素从而简化点云,利用简化后的点云结合快速点特征直方图(FPFH)算法与迭代最邻近点算法(ICP)实现电塔数据的快速配准。实验表明此方法在不损失配准精度的情况下,有效的提高了配准的速度。
关键词 :体素化下采样,点云配准,电力巡线

Copyright © 2020 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
目前基于无人机倾斜摄影电力设备数据采集与无人机激光扫描电力设备的应用越来越多,伴随着点云扫描仪器与点云生成技术的不断发展,倾斜密集点云与激光扫描点云数据量大、冗余数据量多成为了现在很多点云数据的特点,使用这些原始数据直接进行数据分析等工作会对数据的存储、处理以及显示等方面造成了很大的负担,因此在如何在保证点云数据模型信息以及局部细节特征的情况下,在处理点云数据时对数据量庞大的点云数据进行合理简化是很必要的。随着数据采集手段的不断发展,在电力巡线过程中倾斜密集点云和激光扫描点云会扫描到十分丰富的电力线细节,这会对点云配准应用造成很大的负担,因此对点云进行合理简化并结合高效的点云配准算法会对点云的配准效率,进而提升电网通道巡视、树障分析等工作的工作效率。此外通过对倾斜密集点云与激光扫描点云的配准可实现杆塔自动化巡视航线设计,通过制定好的航线进行自动航飞,规避使用手动航飞时手动操作的难题,降低了工作难度,提升了电网巡视的工作效率。
本文采用体素化下采样的方法对配准的原始点云进行处理,保留了电塔点云的局部特征细节,在保证了配准准确率的情况下,提升了整体的配准速度,利用电力主网提供的电塔的位置信息进行电塔点云的提取,并采用粗配准+精配准的方法对点云进行配准,可获取融合倾斜密集点云与激光扫描点云信息的点云数据。采用FPFH点云全局特征提取并通过采样一致性算法进行点云的粗配准,对粗配准结果采用迭代最邻近点法(ICP)完成精配准操作,经实验验证本方法在保证配准精度的情况下,有效的缩短了配准时间。很多学者对点云简化方面以及快速配准方面进行了研究:参考文献 [1] 利用多线程采用CPU和GPU结合的异构并行计算对点云数据进行精简。参考文献 [2] 利用网格均匀分割并使用权阈值进行点云的自适应简化,实现点云的简化。参考文献 [3] 利用NDT算法粗配准与ICP精配准算法相结合的方式对点云进行匹配。参考文献 [4] - [10] 中提出了基于不同算法来实现点云配准,这些方法也为本文的配准算法提供了参考。
2. 关键技术
2.1. 体素化下采样
在以往的点云配准工作中,待配准的点云如若有较多的点数,在执行粗配准对齐时,大量的点数会严重的降低配准效率,而且在计算全局特征时,过多的点会影响k邻域算法对局部特征的判断,会对已有的特征造成错误的判断。而粗配准的主要目的是为了使两幅点云处于良好的初始位姿以提升精配准的效率,所以为了提升点云的配准效率,同时保留点云局部特征,可使用网格体素化降采样方法对点云进行处理。
此方法的具体做法为首先将点云进行三维体素化分割,将点云分割到小的空间三维立方体的集合中,根据各个体素内的点来计算体素的重心,利用体素重心来代表显示体素内的所有点,进而达到点云降采样的效果,同时经过降采样过滤后的点云较好的保留了点云的特征。
式中n为体素中的点数, 为体素包含的点坐标, 为计算后的提速中心。对所有的体素进行计算后,提取体素重心为简化后的点云。
2.2. 自动配准技术
本文所使用的方法为粗配准加精配准的配准方法,粗配准采用FPFH + SAC-IA对齐的配准方法,精配准使用ICP (迭代最邻近点)算法进行点云匹配。基于点的特征可以有效的进行点云配准,再进行体素化降采样点云之后,相较于直接使用粗配准方法,点云的配准速度得到了有效的提升。
点云粗配准的具体流程如图1所示,其中FPFH特征是根据点云中各个点的法向量夹角特点对特征进行描述的,同时根据欧氏距离和局部关键点匹配对向量夹角特征对关键点匹配对进行精简,最后通过采样一致性算法(SAC-IA)与贪婪算法结合在点云中搜索随机采样点FPFH特征相似度高的点组成点集,最后计算旋转矩阵并根据旋转、平移矩阵变换待配准点云的位置以完成粗配准。
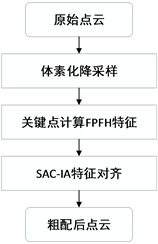
Figure 1. Flowchart for rough registration
图1. 粗配准流程图
经过粗配准后的点云得到位置大致重合的两幅点云,需进一步采用ICP算法对点云数据进行精配准操作。由于ICP算法对初始位置要求比较高,如若两幅点云距离过远,或者初始位姿很差。会造成配准时间过长或者陷入局部最优现象,影像整体的配准效率,所以经过粗配准的点云可以保证点云的初始位姿相对较好,缩短了点云的整体距离,提升配准的效率。
ICP算法流程图如下(图2):首先根据两点云点集中依次遍历,根据距离最短原则找出对应的点集,计算出最邻近点对的旋转矩阵与平移矩阵。通过坐标变换将待配准点云根据变换矩阵调整致目标点云。通过计算点集的平均距离,平均距离的计算方法为将新点集与目标点击对应点距离平方和除数据总点数,循环上述步骤直到循环计算的平均距离结果小于阈值收敛为止,会停止ICP算法的迭代进而完成精配准操作。

Figure 2. Flowchart for fine registration
图2. 精配准流程图
3. 实验分析
本实验基于技术流程,根据主电网提供的电塔坐标进行电塔点云的提取,首先根据电塔资料或者自行量取电塔实际的宽度以用来指定kdtree的搜索半径为9米,进而实现点云的提取工作。
对倾斜密集点云以及激光点云进行点云提取后采用粗配准+精配准的方法对点云进行配准,利用体素化简化点云以提升点云的配准速度。粗配准采用FPFH全局特征加SAC-IA对齐方法进行配准,精配准采用ICP算法。
实验平台:操作系统:windows 10;CPU:i5-8300h;GPU:NVDIA 1060;内存:16 GB。
3.1. 实验过程
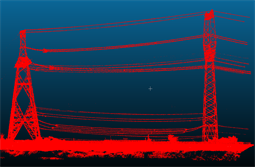
对待配准的两幅点云中的电塔进行提取操作,首先在PCL中加载两幅并进行平滑、去噪等操作,根据主网电塔的坐标位置进行电塔的提取,将对应范围内的电塔点云提取出来,具体效果如图3所示,左图为倾斜密集点云原始点云数据,右图为根据电塔位置进行提取后的点云数据。
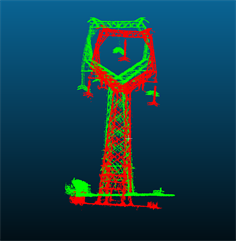
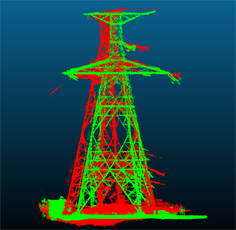
对激光扫描点云进行相同的操作,提取出电塔点云数据,对提取出的两座电塔的两种数据分别进行配准操作,以提升整体点云的配准速度。同时对电塔采用体素化降采样操作会大大提升全局特征计算以及点云对齐的时间。图4为电塔1的粗配准结果,以绿色点云激光点云为目标点云,将倾斜密集点云向目标点云进行配准。电塔1的粗配准耗时为42.901秒。
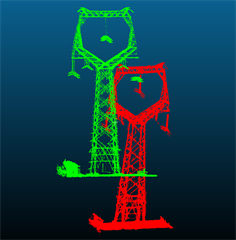
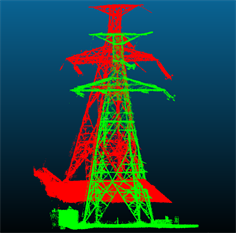
对电塔2采用相同的体素化降采样设置进行点云简化,并进行点云的配准。图5为原始位置与配准结果。可见粗配准可将点云配准至良好的初始位姿,为迭代最邻近点算法提供良好的条件,进而提升配准的成功率与速度。电塔2粗配准耗时为107.894秒。
 (a)
(a)
 (b)
(b)
Figure 3. Tower point cloud extraction; (a) Original data; (b) Original data
图3. 电塔点云提取。(a) 原始点云数据;(b) 提取后的点云
 (a)
(a)
 (b)
(b)
Figure 4. Rough registration of tower 1. (a) Before rough registration; (b) After rough registration
图4. 电塔1粗配准。(a) 粗配准前;(b) 粗配准后
 (a)
(a)
 (b)
(b)
Figure 5. Rough registration of tower 2. (a) Before rough registration; (b) After rough registration
图5. 电塔2粗配准。(a) 粗配准前;(b) 粗配准后
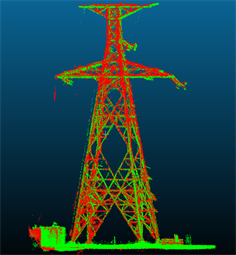
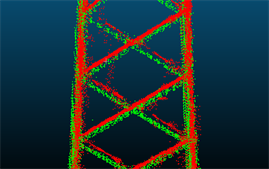
在得到两座电塔的粗配准结果后,分别对两座电塔进行精配准操作。效果如图6所示,两图中的绿色点云为激光扫描点云,红色点云为倾斜密集点云。以倾斜密集点云为目标点云,激光扫描点云向目标点云进行配准。其中电塔1的精配准耗时为46.814秒,电塔2的精配准耗时为54.915秒。
 (a)
(a)
 (b)
(b)
Figure 6. Fine registration. (a) Fine registration of tower 1; (b) Fine registration of tower 2
图6. 精配准结果。(a) 电塔1精配准;(b) 电塔2精配准
3.2. 结果分析
此段电网倾斜密集点云点数为4278206个,激光扫描点云点数为6338198个。经过kdtree利用坐标提取电塔点云,倾斜密集点云的电塔1的点云点数为565475个,电塔2点云数为880930个。激光扫描点云的电塔1的点云数为230001个,电塔2的点云数为750826个。根据表1所示配准结果,此方法可以快速并且较为准确的进行点云的配准操作。同时相较于直接进行FPFH特征计算的方法,采用体素化简化后的点云,在配准精度不受损失的情况下很大程度的减少了SAC-IA对齐时间,进而提升了配准的整体速度。
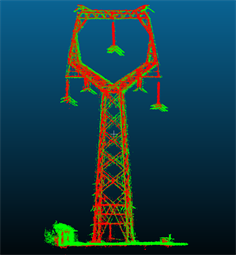
电塔1、电塔2精配准部分横截面结果如图7所示,绿色点云为激光扫描点云,红色点云为倾斜密集点云。由图可知此方法虽较好的整体的配准了整体点云,但是对原始数据的纯净度还是有一定的要求,过多的噪声点存在会影响整体的配准精度。

Table 1. Registration results
表1. 配准结果统计
 (a)
(a)
 (b)
(b)
Figure 7. Fine registration result section. (a) Section of tower 1; (b) Section of tower 1
图7. 精配准截面。(a) 电塔1局部;(b) 电塔2局部
4. 总结和展望
本文提出了一种根据电塔坐标位置进行电塔点云提取并进行快速点云配准的方法,实现了只需通过已知的电塔坐标便可实现电塔配准的操作,在总体配准点云数在80万点数级别的情况下,整个配准时间可控制在2分钟左右。同时随着点云数量的减少,点云总体配准时间可控制在几十秒以内。此方法为精细化电塔点云的三维建模提供了良好的数据基础,同时提升了后续的数据分析如树障分析、数字化的电力巡检、巡检航飞路径规划等应用的工作效率,降低了工作难度。同时此方法对于噪声较多的点云数据配准出现了些许不足,在未来的研究中需着重注意原始数据的质量处理,研究提升原始点云数据的纯净度的相关方法,进一步的提升配准的效率与精度。
文章引用
杨家慧,王 昊,樊灵孟,刘 昌. 基于电塔快速提取的点云配准算法研究
Research on Point Cloud Registration Algorithm Based on Fast Extraction of Electric Tower[J]. 输配电工程与技术, 2020, 09(01): 1-7. https://doi.org/10.12677/TDET.2020.91001
参考文献
- 1. 王庆闪, 张军, 刘元盛, 张鑫晨. 基于NDT与ICP结合的点云配准算法[J]. 计算机工程与应用, 2019, 1-12.
- 2. 成煜钤, 何熹, 贾东峰, 赵磊. 基于权值的散乱点云压缩算法[J]. 河南科学, 2019, 37(7): 1145-1151.
- 3. 孙大林, 唐好选. 路面点云的并行简化研究[J]. 智能计算机与应用, 2019, 9(4): 307-312.
- 4. 吴俊秀, 陈桂芬, 李岳, 朱海忱. 点云配准RANSAC算法研究改进[J]. 长春理工大学学报(自然科学版), 2019, 42(3): 65-69.
- 5. 呼延嘉玥, 徐立军, 李小路. 自研激光雷达三维点云配准技术[J]. 北京航空航天大学学报, 2019, 1-8.
- 6. 范哲君. 散乱点云自动配准算法研究[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工程大学, 2019.
- 7. 赵鸿凯, 张凯云, 沈小华. 基于三维虚拟现实的历史街景重现技术[J]. 科学技术与工程, 2018, 18(25): 200-205.
- 8. 刘剑, 白迪. 基于特征匹配的三维点云配准算法[J]. 光学学报, 2018, 38(12): 240-247.
- 9. 杨必胜, 梁福逊, 黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10): 1509-1516.
- 10. 陈学伟, 朱耀麟, 武桐, 王祖全. 基于SAC-IA和改进ICP算法的点云配准技术[J]. 西安工程大学学报, 2017, 31(3): 395-401.
NOTES
*通讯作者。