Journal of Image and Signal Processing
Vol.3 No.02(2014), Article ID:13314,9 pages
DOI:10.12677/JISP.2014.32006
A Method of Road Extraction from Remote Sensing Images Based on Shape Features and Width-Tolerant Hough Transform
Faculty of Computer Science and Technology, School of Mechanical & Information Engineering, China University of Mining & Technology, Beijing
Email: *zhaopeng8843@gmail.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Dec. 24th, 2013; revised: Jan. 28th, 2014; accepted: Feb. 16th, 2014
ABSTRACT
Road extraction from high-resolution remote sensing image is an important and difficult task. The road-extraction method, which uses the integration shape features and the improved Hough transform, is proposed in this paper. Firstly, the image is segmented, and then the linear and curve roads are obtained by using several object shape features. Secondly, the step of road extraction is using the improved Hough transform method to deal with the road targets. Finally, the extracted roads are regulated by combining the edge information. In experiments, the images including the better gray uniform of road and the worse illuminated of road surface were chosen, and the results prove that the method of this study is promising.
Keywords:Road Extraction, Remote Sensing Image Segmentation, Shape Features, Hough Transform

基于形状特征与容错宽度Hough变换的影像道路提取
张国英,赵 鹏*,宋科科
中国矿业大学(北京)机电与信息工程学院计算机科学与技术系,北京
Email: *zhaopeng8843@gmail.com
收稿日期:2013年12月24日;修回日期:2014年1月28日;录用日期:2014年2月16日

摘 要
提出一种基于分割后图像形状特征并结合改进Hough变换进行道路提取的方法。该方法首先对图像进行分割,对分割结果使用形状特征进行道路段的初步筛选,使用改进后的Hough变换方法对目标进行筛分、合并和形态优化,完成遥感影像的道路网提取过程。提出的方法能适用于复杂的高分辨率遥感影像中道路段的提取。经过实验分析和比较证明:该方法对于路面灰度均匀性较差及路况复杂、干扰物较多的图片,都达到了较好的效果。
关键词
道路提取,遥感影像分割,形状特征,Hough变换

1. 引言
道路作为遥感影像中重要的人工目标,是遥感影像地物信息提取研究的重要内容。现有的遥感影像道路提取方法可分为自动和半自动提取两类[1] -[3] ,自动提取方法包括道路的自动定位和理解,一般由道路段检测、道路跟踪、道路连接三个步骤组成。半自动道路提取则是由人提供初始道路点(有时还提供初始方向),在此基础上进行道路的跟踪、连接、提取。半自动道路提取方法相对简单,已有比较成熟的算法,如基于Snake模型的方法、基于动态规划的方法等。半自动方法需要人工给出道路的种子点,并提供大量辅助数据,不能自动适应不同分辨率的影像,不适用于大量影像数据的处理。
对于自动道路提取,因其涉及到人工智能、模式识别、数学模型等内容,目前尚无通用算法。目前,国内外许多学者在这方面做了大量的研究工作,并且很多成果具有实际应用价值。如Trinder [4] [5] 和Ton [6] 等提出基于平行线对的方法,利用道路往往是一组平行线对的拓扑结构特征进行道路识别。Barzohar等[7] 提出基于窗口模型特征的道路提取,根据道路的形状和曲率等几何特征,采用Gibbs分布和Gauss分布等概率模型,建立道路检测窗口识别道路目标。但对遥感影像的道路自动提取一直难以达到满意的效果。
虽然影像上的道路标线比其他地物更为突出,且呈网状分布,但由于道路在高分辨率遥感影像中的表现形式比较复杂,提取难度较大。遥感影像中道路的复杂主要表现为[8] [9] :主干道与次干道的宽度不一;不同的道路段之间由于材质的不同呈现不同的光谱特征;城区背景下会存在部分与道路光谱特征相似的地物;路面噪声包括建筑物和树木的阴影以及路面上的轨道线、汽车的影响严重;道路在不同分辨率、不同传感器影像上表现形式也各不相同等。这就使得道路提取成为影像目标识别中最具挑战性的难点之一。
针对上文提出的高分辨率影像道路提取的难点,本文提出了一种基于形状特征和容错宽度Hough变换的高分辨率遥感影像道路提取算法。该方法首先对图像进行分割,对分割结果先使用灰度特征提取,再使用多种形状特征进行分类识别,从而确定出道路的区域,通过容错宽度Hough变换算法实现自动连接道路段并提取道路网这一过程。提出的该方法能适用于高分辨率遥感影像中复杂道路状况的道路段提取。
2. 本文提出的道路提取过程
本文针对道路提取的难点,结合道路特征,通过基于灰度一致性的图像分割、特征分类和容错宽度Hough变换等方法,提出了一种新的高分辨率遥感影像道路自动提取方法。道路提取流程如图1所示。
2.1. 影像的地物分割
地物分割方法是高分辨率卫星影像道路识别的一个基础和重要方向,指将整个图像区域按照相同或相似的特征分割成若干个互不交叠的非空子区域的过程,每个子区域的内部均连通,决定分割过程的特征可以是灰度、颜色、形状和纹理等。
传统的分割方法一般有基于区域和基于边缘的两大类分割方法。基于边缘特征的道路理解算法一般利用道路轮廓比较规则这一特点,即利用道路的几何特征,从道路图像的边缘图中提取路边信息。然而,这种方法会受许多因素的影响,如路边建筑物阴影的边缘一般也很规则,这就容易和真实的道路边缘混淆,且路边植被的阴影也会使路边的边缘模糊难辩[10] 。
本文采用的是基于灰度一致性的区域的分割方法,该方法可以将灰度均匀的大目标物体较好地分割开来,形成目标区域。边缘信息由于灰度突变,从而被认为是背景信息。为达到较好的分割效果,处理之前需先进行平滑滤波预处理(本文采用5 × 5矩阵中值滤波处理)。分割过程流程图如图2。
灰度一致性的区域生长分割方法步骤如下:
1) 设点初始点集{A},将某一随机像素点P(x, y)放入点集{A}中,求得像素点P(x, y)的灰度值Gf(x, y)并将其赋给点集灰度平均值Avg,此时点集{A}中点的个数Count = 1。
2) 对于像素点P(x, y),获取领域像素点(x + Δx,y + Δy),其中,Δx和Δy分别属于(−1,0,1)。将像素点(x + Δx, y + Δy)的灰度值记为Gf(Δx, Δy)。
3) 获得像素点(x, y)的邻域像素灰度值Gf(Δx, Δy)与点集{A}灰度平均值Avg的灰度差(本文为r、g、b三个分量),记作Gfi(Δx, Δy),其中i = r,g,b。如果Gfi(Δx, Δy) < ΔT0,则置标记flagfi = 1;否则,置flagfi = 0;(其中ΔT0为阈值)。重复此操作,直至(x, y)的邻域像素处理完毕。
4) 依据式(1),获取各个邻域像素点与点集A的标记flagf的值。
 (1)
(1)

Figure 1. Flow chart of road extraction procedure
图1. 道路提取流程图
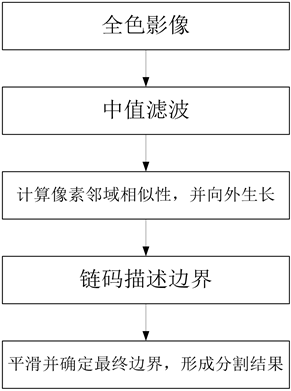
Figure 2. Flow chart of object split procedure
图2. 地物分割流程图
5) 对于flagf =1的邻域像素点Px (x,y),将其存入点集{A}中,更新点集{A}中点数Count值,并依据式(2)重新计算新的点集{A}灰度平均值Avg。
 (2)
(2)
6) 选取点集{A}中新加入点,重复2~5操作,直到点集中像素点数不再增加,此时集合{A}即为具有灰度一值性的区域,用Freeman码描述该区域。
7) 重新选择未处理像素点,重复1~6操作,遍历图像,计算完所有像素点(需要边界处理),即可得到区域分割后的道路影像。
2.2. 影像的地物几何特征提取方法
经过基于生长的灰度一致性分割后,卫星影像被分割成了一个个的对象,结合道路特征对这些对象进行参数约束,即可通过条件筛选提取出道路网络。
将分割好的影像对象通过八链码描述的方法矢量化,然后计算其矢量特征,包括对象的灰度值G、面积S、周长L等,并根据面积、周长、外接矩形计算其他复合特征,建立知识库,进行路网提取。
灰度值G
道路的灰度特征一般是较均匀的,具有连续性且在分布上有规律可寻,可利用影像分割后对象的灰度值进行特征提取。因收到阴影、水迹等因素的影像,灰度值G的选取应在约束在一定范围。
宽长比R
 (3)
(3)
采用旋转法求最小外接矩形, 为最小外接矩形的宽,
为最小外接矩形的宽, 为最小外接矩形的长。道路的宽长比不会很大,因此可以采用R特征过滤掉一些分割后的类似正方形的干扰目标(正方形、圆形的R
= 1.0;正三角形的R = 0.87)。
为最小外接矩形的长。道路的宽长比不会很大,因此可以采用R特征过滤掉一些分割后的类似正方形的干扰目标(正方形、圆形的R
= 1.0;正三角形的R = 0.87)。
充满度F
 (4)
(4)
其中 为最小外接矩形的面积。充满度是分割后对象的面积同其最小外接矩形的比值,其比值越大,处理对象越接近与规则矩形。
为最小外接矩形的面积。充满度是分割后对象的面积同其最小外接矩形的比值,其比值越大,处理对象越接近与规则矩形。
复杂度E
 (5)
(5)
其中,L为目标区域的周长,S为面积。复杂度反映了平面内物体形状的复杂程度及紧凑型的特点,圆的形状是自然界中最简单的形状,其复杂度为1,区域形状越接近于圆,其复杂度E就越大。计算复杂度之前需要先对目标进行边界平滑,以获得准确的周长。
对影像分割后的对象,利用上述特征区分植被、水域、房屋、路段等地物,去除非路段目标,既不能保留噪声目标,也不能去掉路段目标。
文献[11] -[13] 均提出过利用形状特征进行道路提取,但其归纳总结的形状特征都归于简单和笼统,未能充分考虑道路的各种情况,造成道路提取识别率不高,难以适应道路的实际情况。
本文在前人基础上做出了进一步的完善和改进,先通过对分割对象的灰度区间及面积的筛选去除噪声目标,再将道路所呈现的带状特征氛围直线带状和曲线带状两种情况进行识别。
2.3. 基于容错宽度Hough变换的道路优化
经过几何特征的初步筛选后,卫星影像中的道路被筛选出来,但是卫星影像上干扰物太多导致道路目标经常附带一些凸起物,这些凸起物直接影响了最小外接矩形的面积,进而使充满度出现误差,此外对充满度也有一定的误差影响,出现道路目标被误删除和非道路目标没有被删除的现象。利用Hough变换的鲁棒性和容错性可以很好的解决误差问题,但是传统的Hough变换无法适应道路的宽度[14] ,所以必须对原有算法进行改进。
Hough变换方法是由Paul Hough在1962年提出的,它所实现的是一种从图像空间到参数空间的映射关系,其实质是将图像空间内具有一定关系的像元进行聚类,寻找能把这些像元用某一解析形式联系起来的参数空间累积对应点[15] 。
其直线映射关系表达为公式:
 (6)
(6)
Hough变换在遥感图像的道路提取中主要用于分割目标的斜率计算,在实际的应用中,由于道路附近树木建筑等干扰物的存在,分割的边界或者骨架具有突起、锯齿等特征,而传统的Hough变换通常是基于边缘检测的算法[16] ,无法适用于道路边界的检测。
本文的Hough变换摒弃统计数组,增加容错宽度,避免了取整时的一刀切误差,增强抗干扰能力。本文改进了搜索参数空间θ和ρ的算法,采用链表保存ρ值,动态开辟内存空间。设置容错宽度Wline,允许锯齿点或扰动点。如下图3,当Wline = 3时认为以上各点是在同一条直线上。
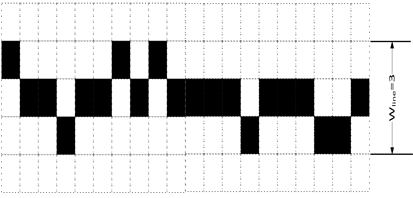
Figure 3. Line graph when Wline = 3
图3. Wline = 3直线图
容错宽度Hough变换算法步骤:
1) 确定θ范围和递增步长;
2) 对参与运算的点按公式6进行参数空间变换,并将计算结果ρ按从小到大排序;
3) 滑动窗口从最小值的一端开始移动,保证窗口的长度最大且窗口两端对应的ρ之差不大于容错宽度Wline,其中窗口长度指窗口两端内包含的ρ值个数;
4) 移动滑动窗口,窗口长度会不停的变化,每次移动都记录窗口的位置和长度,位置一般取窗口两端ρ值的平均值;
5) 移动完成后,找出窗口长度最大时对应的长度和位置;
6) 递增θ,并重复2~5步骤,每次重复将得到θ及其对应的最大窗口长度和位置;
7) θ结束后,从θ组最大值中找出窗口长度最大的θ、窗口长度和位置。
整个算法步骤主要是找出某个θ值的最大窗口长度时对应的位置。最后的结果中,θ是直线法线的方向,窗口位置经过坐标变换后是直线的位置,而窗口长度代表的是隶属于该直线的点的个数。
设置较大的容错宽度Wline,将道路目标的边缘点进行容错宽度Hough变换,在计算出的θ值的约束下,减小Wline并执行2~5步骤,计算出目标的两侧的直线,从而获得目标的主体方向、长度和宽度。
以上算法较传统Hough变换而言,改进最重要的内容是容错宽度的引入。它很好的解决了道路宽度的检测问题,只要设置合适的宽度,道路的直线主体部分就能准确的被检测出。特别是十字路口,用容错宽度Hough变换算法可以准确的检测出两条道路的方向和宽度,为后续的优化工作提供了数据基础和优化依据。
在几何特征提取的基础上,道路优化工作可分为三部分:筛分、合并和形态优化
1) 筛分
容错宽度Hough变换可以计算更准确的目标主体,设主体面积为SM,目标面积为S,主体部分内目标的面积为SN。
矩形度J
 (7)
(7)
矩形度描述了目标和矩形的相似程度,标准矩形的矩形度为1,有缺口矩形的矩形度小于1,有凸起矩形的矩形度大于1。通过矩形度可去除一些形状不佳的目标。
有效度K
 (8)
(8)
主体部分被认为是最有可能确定为道路,有效度描述了道路的完整程度。范围在0~1之间,数值越大说明目标道路特征越好。
2) 合并
待合并的目标从是否接触可分为接触和非接触两种情况,从位置关系可分为并排关系和前后关系两种情况。无论哪种情况,对于较大的目标,参与容错宽度Hough变换计算的点应该来自于目标的端点部分,而不是目标的全部,这样可以避免具有一定曲率的道路弯曲带来的误差。
接触目标合并方法简单,只需重新构建目标即可,而非接触的合并首先应该将目标连接起来,再构建新目标。并排关系的目标合并要求两者接触,否则不合并,前后关系的目标合并要求方向一致。
3) 形态优化
形态优化是道路提取最后一部分,包括5方面的内容:
去除道路目标两侧的凸起部分,使道路笔直、干净;
保留宽度较大的目标,去除孤立的目标;
如果依然存在不接触的并列关系,去掉较短的目标;
填充孔洞,使道路目标更完整;
开运算后,部分凸起和主体分离,去掉面积较小的凸起目标。
3. 本文实验
实验采用资源三号卫星提供的高分辨率全色影像,该影像精度分辨率为2.1 m,采用VC++平台开发环境实现。本实验中特征参数的选择和过滤主要依据大量的实验以获取较好的阈值,并采用人工设定的方法。道路图像如图4所示。
3.1. 分割
原始遥感图像如图4,经过尺度为5的中值滤波处理后,用基于灰度一致性的分割方法对遥感影像进行分割,选取分割阈值为T0 = 5。为了提高算法的效率,在灰度一致性分割时,去除了面积小于200的目标,并对目标进行了边缘平滑。分割结果如图5所示。
通过实验可知,对于灰度一致性较好的图像,分割效果令人满意,可以基本准确的将道路、草坪和房屋等分割成互不连通的区域。
3.2. 基于几何特征的初步筛选
对分割后影像进行特征分析,可以得出:面积小于200的为非道路目标;长宽比大于4且充满度大

Figure 4. Original image
图4. 遥感道路原图
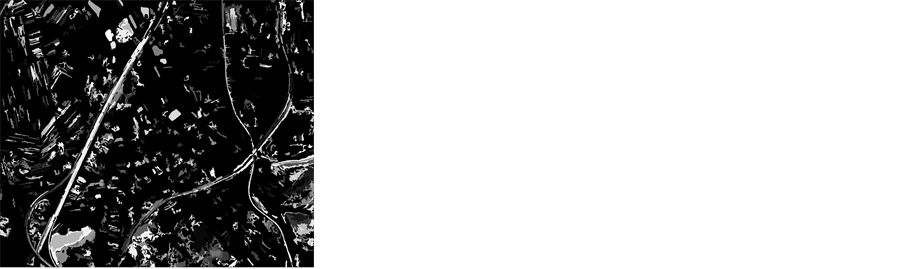
Figure 5. Result of gray consistency segmentation
图5. 灰度一致性分割结果
于0.2的为非道路目标;长宽比小于4且复杂度小于5的为非道路目标。运用该几何特征对分割后道路段进行提取,结果如图6和图7所示。
3.3. 基于容错Hough变换的道路优化
采用容错宽度Hough变换算法,计算出每个目标的主体部分。最小外接矩形长度小于100的目标直接对整个目标进行容错宽度Hough计算,大于100的目标对两端部分进行容错宽度Hough计算,两端的选取长度为100。当计算出每个目标的主体部分后,开始对道路目标进行筛分、合并和形态优化工作。经过分析:有效度大于等于0.7的目标及有效度小于0.7但是矩形度小于3且大于0.4的目标为道路目标;有效度小于0.7且矩形度大于3或者小于0.4的目标为非道路目标。结果如图8所示:
根据道路末端和主体的位置,将并列关系的道路目标进行合并、前后关系的目标进行连接。采用容错宽度Hough变换,计算出道路目标的ρ值和θ值,当目标之间的θ值相差在10度之内、ρ值相差100之内,且道路两端在主方向轴(根据θ决定是x轴还是y轴)上的位置满足包含关系,则认为它们是并列关系。对道路段前后关系的判断应参照道路末端的ρ值和θ值。当满足θ值相差在30度之内、ρ值相差100之内,且末端距离小于300时,则认为它们是前后关系。用两目标的平均宽度连接起来,并合并成一个目标。依据上述合并与连接方法,可得道路目标的合并与连接结果如图9和图10所示。
对道路目标进行开运算处理后,部分凸起和主体分离,去除长度小于800的孤立目标和凸起,去除宽度大于80的非道路目标,填充道路合并后产生的孔洞,道路末端直接用拟合的长方形代替。得到最终的优化结果如图11所示。
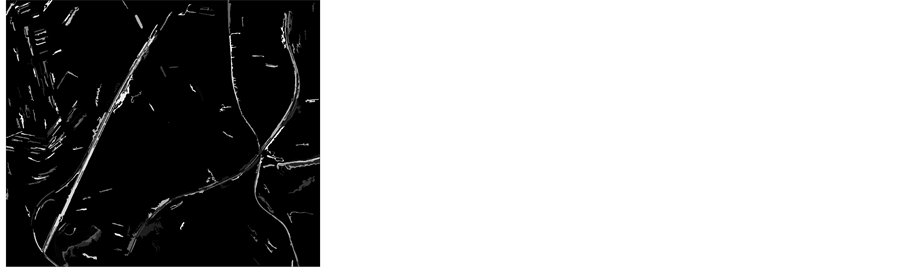
Figure 6. Result of removing small targets
图6. 去掉小面积目标结果
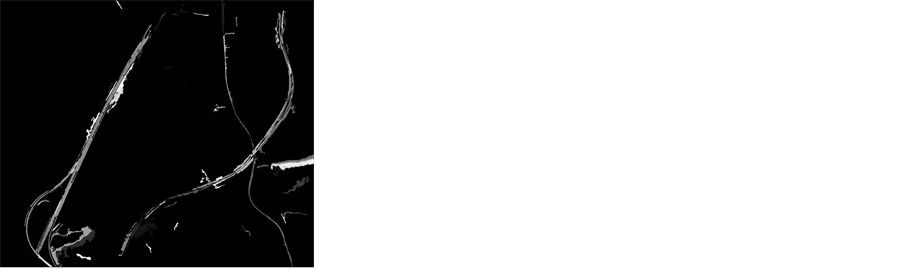
Figure 7. Result of removing aspect ratio constraints
图7. 长宽比约束后的结果

Figure 8. Result of fault-tolerant width Hough and shape feature constraints
图8. 容错宽度Hough后形状特征约束结果

Figure 9. Result of combining road targets
图9. 道路目标的合并结果

Figure 10. Result of linking road targets
图10. 道路目标的连接结果
4. 结束语
针对当前高分辨率遥感影像道路提取算法中存在的自动化程度低、分离目标不清和阴影不易去除等技术难题,本文提出一种基于形状特征和容错宽度Hough变换的高分辨率影像道路提取方法。通过实验分析,可以达到较好的提取效果,对建筑物、水域和阴影的去除都达到理想状况,清晰的提取出了连续的道路目标;尤其在大量实验总结的基础上建立了完整的阈值选取范围,可适应于高分辨率遥感影像的道路提取中。
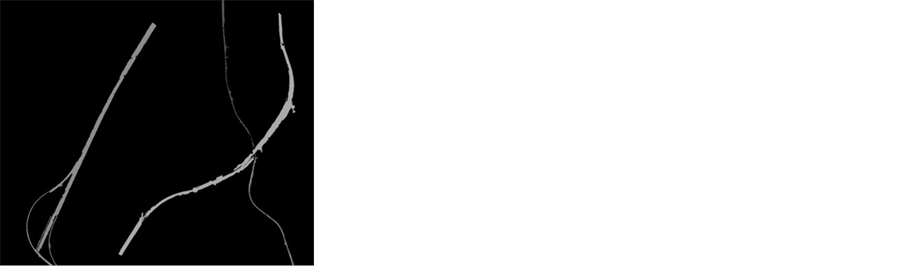
Figure 11. Result of the road extraction
图11. 道路提取的最终效果
但当前算法也存在着不足,当道路路面干扰物较多、灰度不一致时,该方法性能有所下降。因此,后续的研究重心首先是改进道路的分割方法,从而更好地利用分割后的影像的形状特征提取道路;其次是对于纤细道路、复杂立交道路及桥梁等特殊复杂路况道路的提取。
参考文献 (References)
- [1] Mena, J.B. (2003) State of the art on automatic road extraction for GIS update: A novel classification. Pattern Recognition Letters, 24, 3037-3058.
- [2] 吴亮, 胡云安 (2010) 遥感图像自动道路提取方法综述. 自动化学报, 7, 912-922.
- [3] 苗则朗, 史文中, 张华 (2013) 一种高分辨率影像道路中心线提取算法. 中国矿业大学学报, 5, 258-264.
- [4] Trinder, J. and Li, H. (1995) Semi-automatic feature extraction by snakes. In: Grun, A., Kubler, O. and Agouris, P., Eds., Automatic Extraction of Man-Made Objects from Aerial and Space Images (1), Birkhauser Verlag, Basel, 95-104.
- [5] Trinder, J.C., Wang Y.D., et al. (1997) Artificial intelligence in 3D feature extraction. In: Automatic Extraction of Man-Made Objects from Aerial and Space Images (2), Birkhaeuser Verlag, Basel, 257-265.
- [6] Ton, J, Jain A.K. and Enslin W.R. (1989) Automatic road identification and labeling in landsat 4 TM images. Photogrammetric, 43, 257-276.
- [7] Barzohar, M. and Cooper, D.B. (1996) Automatic finding of main roads in aerial images by using geometric-stochastic models and estimation. IEEE Transform on Pattern Analysis and Machine Intelligence, 18, 707-721.
- [8] Hinz, S. and Baumgartner, A. (2003) Automatic extraction of urban road networks from multi-view aerial imagery. ISPRS Journal of Photogrammetry and Remote Sensing, 58, 83-98.
- [9] Hinz, S. and Baumgartner, A. (2002) Urban road net extraction integrating internal evaluation models. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 34, 163-168.
- [10] 龙辉 (2006) 高分辨率光学卫星影像城市道路识别方法研究. 博士学位论文, 中国科学院研究生院(遥感应用研究所), 北京.
- [11] 雷小奇, 王卫星, 赖均 (2009) 一种基于形状特征进行高分辨率遥感影像道路提取方法. 测绘学报, 5, 457-465.
- [12] 何建农, 钟顺虹 (2013) 基于标值点过程改进的遥感道路提取辛酸发. 计算机工程与应用, 17, 150-158.
- [13] 梁栋, 刘书丽 (2012) 基于NSCT与形状特征的遥感影像道路提取. 华中科技大学学报(自然科学版), 3, 9-12.
- [14] 段汝娇, 赵伟 (2010) 一种基于改进Hough变换的直线快速检测算法. 仪器仪表学报, 12, 2774-2779.
- [15] 刘小丹, 刘岩 (2012) 基于Hough变换和路径形态学的城区道路提取. 计算机工程, 6, 527-531.

NOTES
*通讯作者。