Dynamical Systems and Control
Vol.3 No.02(2014), Article
ID:13548,7
pages
DOI:10.12677/DSC.2014.32004
The Regression Formula for Ship with Dead Wood Based on CFD
1Wuhan Technical College of Communications, Wuhan
2School of Transportation, Wuhan University of Technology, Wuhan
Email: 393058012@qq.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Mar. 28th, 2014; revised: Apr. 21st, 2014; accepted: May 2nd, 2014
ABSTRACT
Dynamic positioning technology is a high and new technology in the process of ocean development, of which the dynamic positioning supply vessel (attacked with wood in the tail) which is the main ship type has important implications for researching the motion mathematical model. Taking the ship appendaged with dead wood as the research subject, series of ship model is generated through hull form transformation. The CFD method is applied to numerically simulate the drag motion to calculate the hydrodynamic force on the models in different drift speeds. Then the linear velocity derivatives of different types by the least squares fitting are gotten. On this basis, the regression formula of location hydrodynamic derivatives is obtained through multiple regression. This provides an easy method to determine hydrodynamic derivatives in the preliminary design stage.
Keywords:Ship Appendaged with Dead Wood, Linear Velocity Derivative, Numerical Simulation, Multiple Regression

基于CFD方法求取带呆木船Xu回归公式
师光飞1,柯枭冰2
1武汉交通职业学院,武汉
2武汉理工大学交通学院,武汉
Email: 393058012@qq.com
收稿日期:2014年3月28日;修回日期:2014年4月21日;录用日期:2014年5月2日

摘 要
动力定位技术是海洋开发过程中的高新技术,其中供应船(尾部有呆木)为动力定位主流船型,研究其运动数学模型有重要意义。以带呆木船为研究对象,通过船型变换与呆木变换生成系列船型,基于CFD数值模拟船模在静水中的直航运动,得到系列船型在不同航速时所受到的水动力,利用最小二乘法拟合求得各船型的线性速度导数Xu。在此基础上,通过多元回归,得出了Xu关于船型参数与呆木参数的回归公式,可为设计阶段带呆木船的线性速度导数Xu提供简便的估算方法。
关键词
带呆木船,线性速度导数,数值模拟,多元回归

1. 引言
随着社会物质财富的极大增长,陆上资源和能源的供应日益紧张,文明的可持续发展,有赖于陆地经济模式向海洋经济模式的转型。因海洋环境的复杂,要开发海洋的资源及能源,需要先进的技术和设备作为支撑,动力定位技术就是海洋开发技术的典型代表。
作为动力定位技术的常用船型,供应船的使用越来越多,在建立供应船的运动数学模型时,需要确定模型中的水动力导数。本文研究其中的纵向线性水动力导数的求取方法。
在船舶设计阶段,确定船舶水动力导数一般有以下几种方法:经验公式法、约束模实验法、理论和数值计算法、自航模实验(实船实验)加系统辨识方法,其中经验公式法最为方便快捷。但已有的经验公式都有一定的使用范围。只有合适的船型,才能得到能够达到工程需要的精度的结果。由于动力定位供应船一般都装有呆木,目前仍没有关于这一船型的水动力导数经验公式发表。
有鉴于此,本文通过船型变换生成系列呆木船船型,采用CFD方法计算系列呆木船船型的线性水动力导数Xu,再用多元回归分析建立水动力导数关于船型参数的回归公式。可为设计阶段供应船Xu的求解提供参考。
2. 数值计算方法
2.1. 坐标系[1]
坐标系如图1所示,o点在船中,纵轴x正方向指向船首,横轴y正方向指向左舷,按照右手法则,z轴正向垂直向上。
2.2. 控制方程[1]
对三维粘性不可压缩的N-S方程和连续性方程进行时均化处理,得到:
 (1)
(1)
 (2)
(2)
式中: 为平均速度分量,
为平均速度分量, ,
, ,
,
 ,
, 的取值范围为(1, 2, 3);
的取值范围为(1, 2, 3); 为平均压力;
为平均压力; 为流体密度;
为流体密度; 为体积力;
为体积力; 为流体动力粘性系数;而多出的项
为流体动力粘性系数;而多出的项 定义为雷诺应力项。方程式(2)即为雷诺时均N-S方程,简称RANS方程。
定义为雷诺应力项。方程式(2)即为雷诺时均N-S方程,简称RANS方程。
2.3. 湍流模型[1]
由于RANS方程中引入了新的未知量—雷诺应力项 ,要封闭方程组,必须对雷诺应力作出某种假定(即湍流模型)。目前,在工程上使用最广泛的有RNG k-ε和SST k-ω模型。在RNG k-ε模型中,通过大尺度运动和修正后的粘度项体现小尺度的影响,而使这些小尺度运动有系统地从控制方程中去除。而SST k-ω模型考虑湍流剪切应力输运,修正了湍流粘度的定义,引进混合函数,近壁区和远场区别对待,使二者都得到很好的模拟。本文根据相关文献和实际效果,采用SST k-ω模型。
,要封闭方程组,必须对雷诺应力作出某种假定(即湍流模型)。目前,在工程上使用最广泛的有RNG k-ε和SST k-ω模型。在RNG k-ε模型中,通过大尺度运动和修正后的粘度项体现小尺度的影响,而使这些小尺度运动有系统地从控制方程中去除。而SST k-ω模型考虑湍流剪切应力输运,修正了湍流粘度的定义,引进混合函数,近壁区和远场区别对待,使二者都得到很好的模拟。本文根据相关文献和实际效果,采用SST k-ω模型。
3. KVLCC2计算验证
3.1. 计算模型与网格划分
为了验证本文计算方法的有效性,并由于缺乏直航试验资料,首先使用该方法计算了ITTC推荐标准船型KVLCC2在斜航状况下所受水动力[2] [3] ,并与INSEAN水池斜拖试验结果对比。KVLCC2主要几何参数如表1[4] 。
计算域如图2所示,上游1.5Lpp处建立入流面;下游3Lpp处建立出流面;左右边界距船模中纵剖面各为1.5Lpp,水深吃水比h/T = 8.3,傅氏数Fn = 0.064。
KVLCC2船尾部有尾轴出口,使全船结构化网格难以实现。在船尾处划分非结构化的四面体网格,其余各处采用分块结构化网格。网格数为413.5万,界层内使用Boundary Layer命令划分多层网格来捕
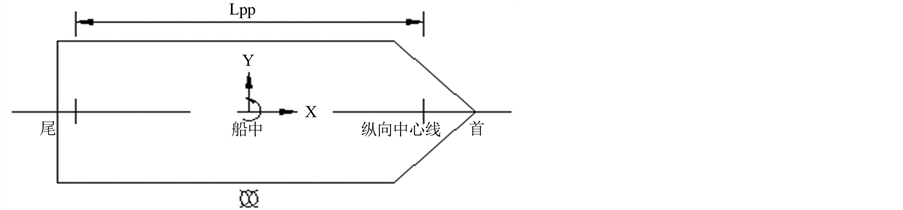
Figure 1. Body coordinate system
图1. 随船坐标系

Table 1. The main elements of KVLCC2 model
表1. KVLCC2船模主要要素
捉船模边界层内流动。如图3。
3.2. 边界条件及数值方法
所谓边界条件,是指在计算域的边界上所求解的变量或者一阶导数随地点和时间变化的规律。本文边界条件设置为:入流面;左右侧面:VELOCITY_INLET;出流面:OUTFLOW;船体表面:WALL;计算域的上表面、下表面:SYMMETRY。分块划分结构化网格时,块与块之间重合而分属于不同块的面均设置为INTERFACE。
湍流模型选取SST k-ω模型,压力速度耦合选取SIMPLEC算法,压力插值采用Standard格式,动量、湍动能和湍流耗散率插值采用Second Order Upwind格式[5] 。
3.3. 计算结果及分析[6]
保持x方向速度不变,变化y方向的速度来形成不同的漂角( ,
, 为横向速度,
为横向速度, 为纵向速度)。根据相对运动原理,船模位置保持不变,水流以一定速度流向船模。基于Fluent软件平台计算不同漂角下船舶所受横向力Y和转首力矩N。文章中计算了0.268˚,0.55˚,1.05˚,1.8˚,3.8˚ 5个不同漂角下各船型横向力Y和转首力矩N,计算结果与INSEAN试验数据的对比如图4所示[7] [8] 。
为纵向速度)。根据相对运动原理,船模位置保持不变,水流以一定速度流向船模。基于Fluent软件平台计算不同漂角下船舶所受横向力Y和转首力矩N。文章中计算了0.268˚,0.55˚,1.05˚,1.8˚,3.8˚ 5个不同漂角下各船型横向力Y和转首力矩N,计算结果与INSEAN试验数据的对比如图4所示[7] [8] 。
从图5中可以看到,横向力Y计算值与试验值吻合良好,误差较小。试验值在1.05˚时出现微小波动,而计算值比较平稳,这可能由于数值模拟受到的干扰没有试验状态下复杂,符合实际情况。而转首力矩N在小角度(0.26765˚, 0.55˚, 1.05˚)时,数值计算结果与试验数据吻合良好,在稍大角度(1.8˚, 3.8˚)时,二者间隔较大,但总体趋势是一致的。

Figure 2. Computed field
图2. 计算域
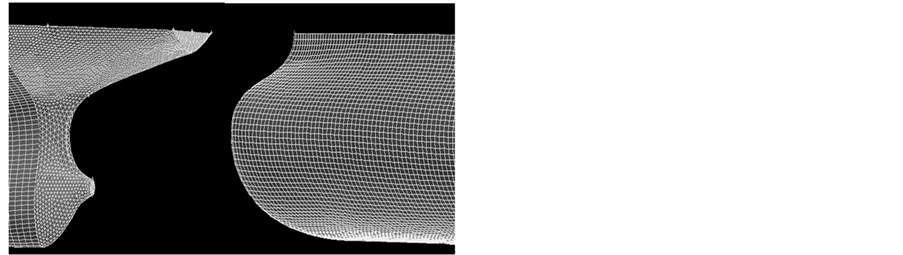
Figure 3. The grid of bow and stern
图3. 首、尾部网格
4. 系列船型计算方案
4.1. 系列船型生成
变换的母型船为一艘75 m动力定位供应船,船模缩尺比为20。船舶主要几何参数如表2。
对50条供应船进行统计,其主要参数取值范围为:3.2 < L/B < 5;9.5 < L/d < 20;2.5 < B/d < 4.5;0.6 < Cb < 0.8,呆木侧投影面积Aw/Ld的范围为2.5%~8.5%,如图5。船型变换过程中保持排水量和船长不变,变换的模型利用Maxsurf软件生成。变换方案如表3[9] ,呆木变换方案如图6。
在生成的25个系列船型(包括母型船)中,减去吃水过小和过大的、并将非常接近的方案取其中之一,剩下20个船型,是需要进行计算的模型[10] [11] 。
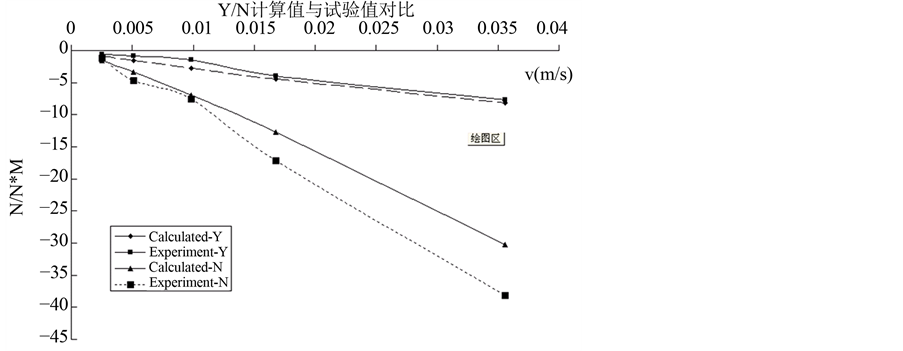
Figure 4. The comparison of drift data between CFD and test
图4. KVLCC2船模斜航CFD结果与试验数据对比
Table 2. The main elements of supply and parent ship
表2. 供应船母型船主要要素

Figure 5. The side elevation of parent ship
图5. 母型船侧视图
Table 3. The transformation plan of ship form
表3. 船型变换方案

Figure 6. The diagram of deadwood transformation
图6. 呆木变换方案示意图
4.2. 系列船型计算结果及无因次化
系列船型的直航数值计算方法及步骤与验证船型KVLCC2斜航计算基本相同,仅在设置边界条件时将左右侧面改为SYMMETRY,设置计算参数时考虑船型的不同特点。下面以A1为例,说明求取水动力导数Xu的步骤。
根据船舶水动力导数Xu的物理意义,即在其他因素不变的情况下,由于u的变化引起X的变化的大小,也就是X关于u在运动速度下的偏导数。可以通过数值计算不同直航速度时船模所受阻力来求取水动力导数Xu,如图7,反映了A1船在不同航速下的水动力曲线,求取曲线在低速段的平均斜率,即为线性水动力导数Xu。
根据以上方法求取其他船型的水动力导数Xu,并将结果进行无因次化,无因次值如表4所示。其中无因次化规则为:

式中: 为流体密度,
为流体密度, 为
为 方向速度,
方向速度, 为垂线间长。
为垂线间长。
5. 位置水动力导数回归公式[12]
根据表4中各船型的水动力导数无因次值,进行多元线性回归分析拟合位置水动力导数回归公式。由于没有这方面的公式可供参考以选取自变量,本文选取B/d,L/B,L/d,Cb,Aw/Ld,xw/0.5Lpp为自变量进行线性拟合,下面给出由全部20个样本点拟合的回归公式[13] :
 (3)
(3)
将Xu’的CFD计算值与公式预测值进行了对比,如图8,从图中可以看出,也测公式与计算值在后部分拟合程度较前面为好,前面的拟合出现偏差的原因可能有两个方面:
1) 可以看到CFD计算值在前面出现了较大的波动,可能计算值本身有误;
2) 选取拟合公式自变量不太合适,可能还需要研究拟合公式的其他变量选择。
但我们知道,纵向附加质量的数值较小,本文中Xu的计算值基本在−19~−22的小范围内变化,在实际使用中一般是根据椭圆回转体的修正公式进行粗估,结果对使用要求影响不大。本文的公式仍有一定的参考价值。
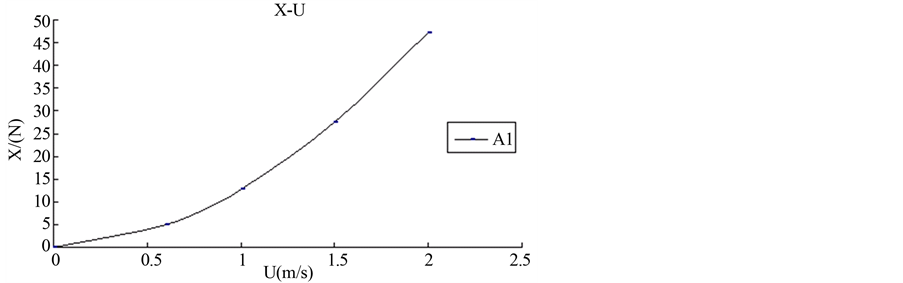
Figure 7. The drag resistance of A1
图7. A1 船的直航受力曲线
Table 4. Series of the location of the ship hydrodynamic derivatives dimensionless value
表4. 系列船型的位置水动力导数无因次值

Figure 8. The comparison of CFD data and formula predicted data of Xu’
图8. Xu’ CFD计算值与拟合公式预测值对比
6. 结语
本文对带呆木船纵向速度水动力导数Xu的CFD回归方法进行了研究,得出以下结论:
1) 首先基于Fluent软件平台计算了KVLCC2船的斜航流场,得到横向力和转首力矩,与INSEAN水池实验数据对比,证明了用CFD方法计算船舶斜航流场的有效性;
2) 然后通过船型变换技术,得到呆木船的不同船型,采用与1)中相同数值方法计算其不同漂角下斜航流场,并通过最小二乘法拟合得到纵向速度水动力导数Xu及其无因次值;
3) 最后通过多元线性回归,得到带呆木船纵向速度水动力导数Xu的回归公式。求取的回归公式为设计阶段纵向速度水动力导数Xu的确定提供了简便的参考。
参考文献 (References)
- [1] 王福军 (2005) 计算流体动力学分析. 清华大学出版社, 北京.
- [2] 田喜民, 邹早建, 王化明 (2010) KVLCC2船模斜航运功粘性流场及水动力数值计算. 船舶力学, 8, 834-840.
- [3] 杨勇, 邹早建 (2011) 非定常操纵运动船体水动力数值计算. 硕士论文, 上海交通大学, 上海.
- [4] SIMMAN2008 (2008).
http://www.detmaritimedanmark.dk/public/dokumenter/EMUC/News/2008/1%20kvartal/SIMMAN2008%20opslag.pdf - [5] 李冬荔 (2009) 基于CFD方法的船舶操纵性能预报. 武汉理工大学学报, 24, 120-123.
- [6] 李冬荔, 杨亮, 聂武 (2009) 操纵运动船舶的水动力计算研究. 船舶工程, 2, 8-11.
- [7] 刘山 (2012) 基于CFD技术数值模拟平面运动机构试验. 硕士论文, 武汉理工大学, 武汉.
- [8] 杨波, 万林, 王骁, 石爱国 (2008) 纯横荡和旋臂试验的数值模拟. 舰船科学技术, 4, 138-141.
- [9] 王银 (2012) 舰船方案设计中的耐波性预报模型研究. 硕士论文, 哈尔滨工程大学, 哈尔滨.
- [10] 项久洋, 毛筱菲 (2008) 基于主要尺度要素的船型变换. 中国舰船研究, 4, 15-19.
- [11] 袁益雷 (2008) 基于新细长船兴波阻力理论的系列60阻力图谱之拓展研究. 硕士论文, 哈尔滨工程大学, 哈尔滨.
- [12] 杨盐生 (1995) 船舶阻力系数和推力系数的数据库方法. 大连海事大学学报, 4, 14-17.
- [13] 方崇智, 萧德云 (2001) 过程辨识. 清华大学出版社, 北京.