Dynamical Systems and Control
Vol.04 No.01(2015), Article ID:14676,5
pages
10.12677/DSC.2015.41001
Research on Hybrid Excavator Energy Recovery Based on Electric Motor Driven Method
Dongyun Wang, Yu Zhang
The College of Engineering, Zhejiang Normal University, Jinhua
Email: zsdwdy@zjnu.cn, zjnuzy@zjnu.cn
Received: Nov. 6th, 2014; revised: Nov. 26th, 2014; accepted: Dec. 3rd, 2014
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Hybrid technology has become the key technology to improve energy efficiency of hydraulic excavators. Based on it, several energy recovery schemes have been widely studied. After analyzing the characteristics of ordinary excavator slewing mechanism, a kind of motor-driven rotary energy recovery solutions has been introduced. It uses an electric motor instead of hydraulic motor to drive the slewing mechanism, and uses super-capacitor to be energy storage unit. Meanwhile, the vector control algorithm has been used to control the electric motor. Simulation results show that this solution could achieve good energy recovery efficiency.
Keywords:Hybrid Power-Train, Hydraulic Excavator, Energy Recovery, Slewing Brake
混合动力挖掘机电驱回转能量回收方法
王冬云,张昱
浙江师范大学工学院,金华
Email: zsdwdy@zjnu.cn, zjnuzy@zjnu.cn
收稿日期:2014年11月6日;修回日期:2014年11月26日;录用日期:2014年12月3日

摘 要
混合动力技术已经成为液压挖掘机节能研究的重点,基于混合动力技术的能量回收方案也得到了广泛研究。基于普通挖掘机的回转机构的特点分析,设计了一种电机驱动回转能量回收方案。方案以电动/发电一体机液压回转代替液压马达驱动回转机构,超级电容器为储能单元,采用矢量控制算法实现电机的驱动和能量回收。仿真研究表明,该方案具有较好的能量回收效果。
关键词 :混合动力,液压挖掘机,能量回收,回转制动

1. 引言
混合动力挖掘机及其配套节能技术已经得到了工程机械研究人员的广泛关注。各种复合型式的混合动力挖掘机耦合技术及其控制策略研究相对充分 [1] - [4] ,能量回收技术主要集中于动臂下降势能回收以及上车回转制动能量回收 [3] [5] 。目前上车回转能量回收大都基于现有的液压马达驱动回转,通过液压油路的改造进行液压能回收,回收效率较低 [6] 。在液压马达驱动回转结构特点分析基础上,基于并联油电混合动力技术,设计了一种基于电机驱动回转能量回收方案。
2. 普通挖掘机回转机构分析
普通液压挖掘机回转系统的工作原理如图1所示 [3] 。
 1—油箱;2—变量液压泵;3—溢流阀;4—多路阀;5—负流量控制节流阀;6—定量回转马达;7—单向阀;8—过载缓冲阀;9—操作手柄;10—机械制动器
1—油箱;2—变量液压泵;3—溢流阀;4—多路阀;5—负流量控制节流阀;6—定量回转马达;7—单向阀;8—过载缓冲阀;9—操作手柄;10—机械制动器
Figure 1. The hydraulic schematic of the slewing system
图1. 普通液压挖掘机回转系统的工作原理图
回转启动加速时,通过操纵手柄9向多路阀4发送信号使4右边的电磁阀通电。此时,多路阀使A接工作油路,B接油箱(反向旋转时B接工作油路,A接油箱)。此时,马达进口压力随着泵的压力增大而不断增大,进出口压力差也随之增大从而导致马达的加速转动。在工作过程中,为了避免冲击、保持系统中的油压稳定,一部分工作油通过缓冲溢流阀的缓冲部分流回油箱。
回转制动时,手柄9处于中间位置。此时多路阀关闭,切断了供油和回油油路。由于回转平台继续沿驱动时的方向继续运转,产生巨大的回转惯性力矩,使回转马达6处于泵模式工作。此时A口变成了低压,B口变成了高压,进出口压力差变为负值。B口的压力油不能从主控制阀3返回油箱,只能通过缓冲溢流阀的缓冲部分将液压油送入油箱。此时,大部分的转动能量将变为热能的形式散失。理论计算表明,一个挖掘装车循环,回转制动消耗的能量约占整个挖掘循环的20%左右。
3. 混合动力挖掘机能量回收机构设计
回转制动能量回收液压系统在保证节能效果的同时,不会影响挖掘机的操控性、可靠性以及工作效率,即驾驶员在操作传统液压挖掘机与具有回转制动能量回收的挖掘机时,对于转台回转同样角度,操作手柄动作时间点基本不变化,保证不会影响到系统原有的操作性能。
挖掘机的回转过程虽然因驾驶员习惯不同而有所差异,但总体均遵行起动加速、匀速、减速制动三个阶段。以7-ton机型为例,该过程大概持续约4 S左右 [7] ,随着挖掘机吨位增加,考虑回转过程的稳定性,时间也将相应增加。因此回转制动能量回收是一个时间可预测的、过程具有规律性的对象,相比于混合动力汽车刹车制动过程的不可预测性,挖掘机的回转制动能量回收更具有可行性。因油电混合动力系统采用电动机和能量存储单元作为辅助动力,将传统的液压马达驱动回转改为电动/发电机驱动回转并进行能量回收是相对容易实现的。为此基于并联混合动力液压挖掘机控制系统 [8] ,设计了如图2,图3所示的回转结构。其中回转减速电机与中央回转接头之间通过齿轮啮合,两级减速传动比总和为240:1。回转电机采用永磁同步电机,能够四象限工作。驱动回转时工作于电动状态,而当回转制动时,电机进入发电状态,通过电机控制器反馈回电能,储存到能量存储单元中。
4. 元件设计及仿真模型建立
以7-ton挖掘机为对象,其回转机构的主要参数如表1所示:
根据挖掘机的性能指标需求,设计了回转机构的主要部件参数如表2所示:
为了研究电驱回转能量回收机构的性能,基于AMEsim建立了回转机构模型如图4所示。电机、超级电容器、电机控制器、回转减速机构均采用系统库模型,同时根据回转机构参数对库模型进行参数设置。通过设置减速机构模型的载荷输入,仿真时观测电机、超级电容器及电机控制器的主要参数以判别回转机构关键部件的性能及参数设计合理性。其中电机控制器采用矢量控制模型,控制原理如图5所示。
5. 仿真研究
仿真过程由启动加速、匀速、减速制动三个阶段组成,图6为仿真期望的电机工作转速与负载扭矩。在满抖回转过程中超级电容的端电压与工作电流如图7所示,电机输出扭矩与工作电流如图8所示。
从仿真结果可见,所设计的电机驱动回转能量回收机构及控制器能够较好的实现挖掘机的回转驱动与制动的能量回收。采用矢量控制算法,电动机的转矩输出完全能够满足回转驱动需求,制动时电动机能够迅速由电动模式转化为发电制动模式。在仅考虑回转能量回收所选用的超级电容器一个回转循环中,电压由380 V降低到376.6 V后回升至377.5 V,按照电容存储能量 计算公式:

Figure 2. The power-train schematic of a parallel hybrid excavator
图2. 电机驱动回转并联混合动力系统原理图

Figure 3. The structure diagram of the slewing platform
图3. 电机驱动回转平台底座结构图

Table 1. The main parameters of the slewing system
表1. 7-ton挖掘机回转机构主要指标参数
Table 2. The main components parameters
表2. 电动回转机构主要部件参数
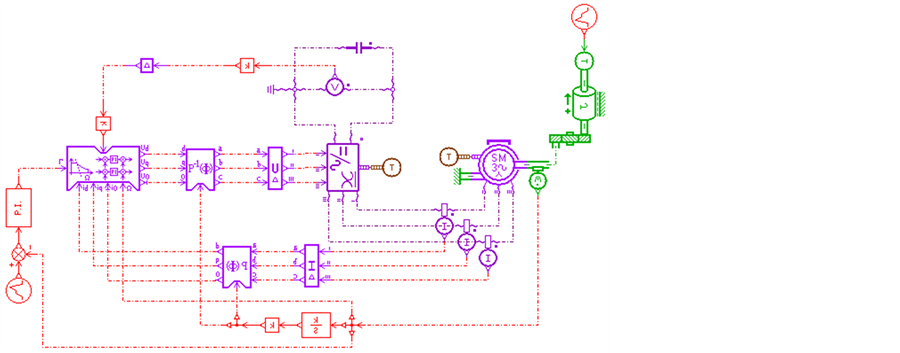
Figure 4. Model of the slewing system based on AMEsim
图4. 电驱回转机构AMEsim模型

Figure 5. The vector control principle of the electric motor
图5. 电动发电机的矢量控制原理图
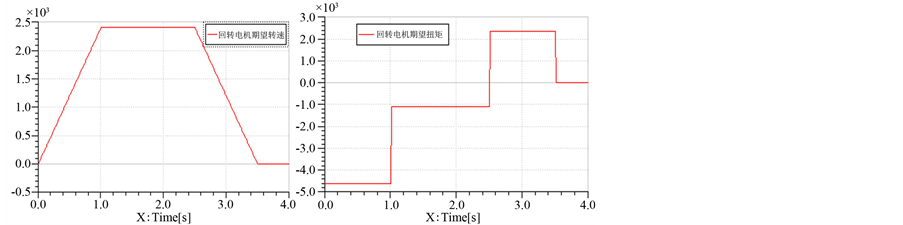
Figure 6. The rotary speed and expected input torque of the model
图6. 回转机构速度及期望转矩输入

则回收的能量效率可以按如下公式计算:

6. 结论
通过对传统液压挖掘机回转机构分析,结合有点混合动力挖掘机的动力特点,设计了基于电机驱动
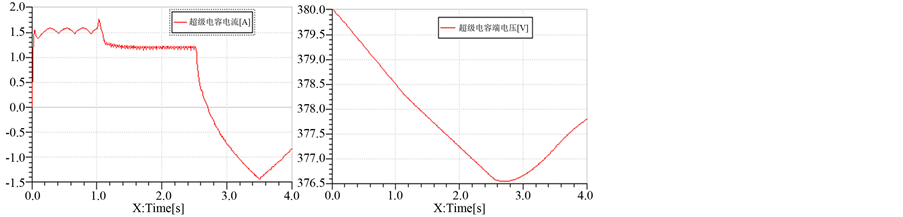
Figure 7. The working current and voltage curve of the super-capacitor
图7. 超级电容工作电流、电压及变化曲线

Figure 8. Curves of output torque and 3-phases current of the electric motor
图8. 电动机的输出扭矩及三相工作电流
回转并进行制动能量回收的方案。电机驱动采用矢量控制算法,并已超级电容器为储能单元。是仿真结果来看,满抖回转制动能量回收量相当于驱动量的26.38%,回收效果明显。另外一个挖掘装车循环具有两次回转制动环节可以进行能量回收,因此对挖掘机回转进行电驱回转能量回收是非常必要的。
基金项目
国家自然科学基金,编号:51205368;浙江省自然科学基金,编号:LQ12E05003。
文章引用
王冬云,张 昱, (2015) 混合动力挖掘机电驱回转能量回收方法
Research on Hybrid Excavator Energy Recovery Based on Electric Motor Driven Method. 动力系统与控制,01,1-6. doi: 10.12677/DSC.2015.41001
参考文献 (References)
- 1. Choi, J., Kim, H. and Yu, S. (2011) Development of integrated controller for a compound hybrid excavator. Journal of Mechanical Science and Technology, 25, 1557-1563.
- 2. Lin, T.L., Wang, Q.F. and Hu, B.Z. (2010) Research on the energy regeneration systems for hybrid hydraulic excavators. Automation in Construction, 19, 1016-1026.
- 3. Xiao, Q., Wang, Q.F. and Zhang, Y.T. (2008) Control strategies of power system in hybrid hydraulic excavator. Automation in Construction, 17, 361-367.
- 4. Wang, D.Y., Lin, X. and Zhang, Y. (2011) Fuzzy logic control for a parallel hybrid hydraulic excavator using genetic algorithm. Automation in Construction, 20, 581-587.
- 5. Wang, T. and Wang, Q. (2012) Optimization design of permanent magnet synchronous generator for potential energy recovery system. IEEE Transactions on Energy Conversion, 27, 856-863.
- 6. 管成, 徐晓, 林潇, 王守洪 (2012) 液压挖掘机回转制动能量回收系统. 浙江大学学报, 1, 142-149.
- 7. 王冬云, 潘双夏 (2009) 基于混合动力技术的液压挖掘机节能方案研究. 计算机集成制造系统, 1, 188-196.
- 8. Wang, D.Y. and Pan, S.X. (2009) Performance analysis of hydraulic excavator powertrain hybridization. Automation in construction, 18, 249-257.