Hans Journal of Civil Engineering
Vol.
10
No.
03
(
2021
), Article ID:
40840
,
10
pages
10.12677/HJCE.2021.103019
最优控制法对斜拉桥索力的控制机制
王九公,李树忱
山东大学,齐鲁交通学院,山东 济南

收稿日期:2021年2月7日;录用日期:2021年2月26日;发布日期:2021年3月9日

摘要
由于外海海域工程环境的特殊性,对于施工过程中斜拉索索力的控制需要考虑风力、湿度、日照以及温度等多种因素影响,如何确定合理的索力施工控制机制成为斜拉桥施工过程中最主要的问题之一,影响到后续斜拉索挂索施工甚至后期梁段合拢,因此需要通过综合多种控制方法控制实际施工索力来满足控制需求。最优控制法通过多方数据比对,综合运用振动频率法建立现场实测频率与索力值的换算方程、计算千斤顶油压与索力的回归关系以及建立拉索端引伸量与索力的等效数学关系,从而对索力进行复核和控制。当施工阶段出现误差,需要调整索力时,调整量通过最优控制法计算确定,从而实现对施工过程中索力的精细化控制。
关键词
振动频率法,油压回归法,等效数学法,最优控制,斜拉索索力
Optimal Control Method for the Control Mechanism of Cable Force for Cable-Stayed Bridge
Jiugong Wang, Shuchen Li
School of Qilu Transportation, Shandong University, Jinan Shandong

Received: Feb. 7th, 2021; accepted: Feb. 26th, 2021; published: Mar. 9th, 2021

ABSTRACT
Due to the particularity of the engineering environment in the open sea, the control of the cable force during the construction process needs to consider the influence of wind, humidity, sunshine, temperature and other factors. How to determine a reasonable cable force construction control mechanism becomes one of the most important problems during the cable-stayed bridge construction process, which affects the subsequent cable-stayed construction and even the later closing of the beam section. Therefore, it is necessary to control the actual construction cable force through a comprehensive variety of control methods to meet the control requirements. The optimal control method uses the vibration frequency method to check and control the cable force, such as to establish the conversion equation between the measured frequency and the cable force value, calculates the regression relationship between the jack oil pressure and the cable force, and establishes the equivalent mathematical relationship of the cable end extension and the cable force. When there is an error in the construction stage and the cable force needs to be adjusted, the adjustment amount is calculated and determined by the optimal control method, so as to realize the fine control of the cable force during the construction process.
Keywords:Vibration Frequency Method, Oil Pressure Regression Method, Equivalent Mathematical Method, Optimum Control, Stay Cable Tension

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着国民经济的高速发展和交通运输对重要基础设施的新要求,大跨度桥梁的修建规模和数量与日倶增,同时大跨度桥梁是交通行业新技术集中应用与创新的综合体现。随着斜拉桥结构由大跨度向超大跨度方向发展,斜拉桥施工控制作为一项涉及多个领域的系统工程,亟须在对相关关键理论、技术与方法进行深入研究的基础上发展具有普遍意义的大跨度斜拉桥施工控制技术 [1] [2] [3] [4] [5]。
为有效、便捷地使得实际工程达到拟定的合理成桥状态,国内外学者开展了众多研究,提出了正装迭代法、索长迭代法、几何控制法等多项控制方法,并在实际工程中取得了良好的控制效果。颜东煌等 [6] 使用正装迭代法将成桥状态与事先定好的合理成桥状态比较,按最小二乘法原理使两个成桥状态相差最小,以此来修正张拉索力,再进行新的一轮正装计算,直至收敛。秦顺全等 [7] 使用无应力控制法,以结构构件无应力状态的测试指标(主梁及索塔的无应力长度和无应力曲率、斜拉索的无应力索长)为控制手段,以桥梁结构构件的力学指标为辅来实现施工控制。向中富等 [8]、王晟等 [9] [10] 基于斜拉索的无应力长度表达式,根据拉索张拉前的结构状态与拉索目标无应力长度,提出了施工阶段的索长迭代法。李乔等 [11] 在几何控制法的基础上,通过细化无应力状态指标以及优化桥梁结构力学指标来进行进一步精细化控制。
本文在外海域斜拉桥特殊工程背景下,运用实际力学理论以及现场试验获得实测数据,通过最优控制法对索力进行合理调整,从而达到施工状态索力的最优控制。
2. 振动频率法测实时索力
2.1. 推导理论
2.1.1. 基础算法
测量斜拉索振动频率时,根据张力弦振动公式
(1)
式中:
F:弦的自振频率
L:弦的长度
ρ:弦的材料密度
δ:弦的拉力
可知,明确了弦的材料和长度之后,测量弦的振动频率就可确定弦的拉力。对于两端固定匀质受力的钢索也可近似作为弦。钢索的拉力T与其基弦F有如下关系:
(2)
其中:
K:比例系数
F:钢索基频
T:钢索拉力(kN)
F = Fn/n (3)
其中:
Fn:主振动频率(Hz)
n:主振频率的阶次
因此,通过测量钢索的主振动频率,就可求出钢索的拉力。
2.1.2. 比例系数
比例系数K由以下公式确定:
(4)
其中:
W:钢索单位长质量(kg/m);
L:钢索两嵌固点之间的长度(m)。
对钢索分级张拉。通过张拉装置读取各级张拉力T,用索力动测仪测量各级拉力下钢索的基频F,则比例系数K可通过最小二乘法求出。
(5)
其中:
P:张拉级数
由于(4)式作如下假设:
1) 钢索是只能受拉而不能受弯、受剪,即只有抗拉钢度。
2) 钢索质量在全长范围内是均匀的。
3) 钢索振动时没有外力作用其上且横向位移极小。
4) 钢索两端嵌固。
因此(4)式为一近似计算值。如果测量条件许可,采取标定公式(5)。对于自振频率与拉力具有一一对应关系而不能用公式(2)表达的钢索,用动测仪测量自振频率,用标定曲线计算索力。同时,为保证仪器标定方法和标准力的准确性,采用标准力传感器(锚索计)来提高计算拉力的精度。
2.1.3. 频率阶次
钢索的振动信号是由多谐振动信号组成的复合振动信号。因此作频谱分析后,频谱图形上会有多个峰值点出现,每个峰值点代表钢索的一个自振频率,根据式(3)可知钢索的自振频率近似为其基频的整数倍,动测仪测量后显示的频率为峰值最高点的频率,简称为主振频率,为求出一阶频率(基频)必须求出主振频率的阶次n。在谱图上,每一个峰值点都代表钢索的一个自振频率,根据式(3),如果钢索自振频率均出现在频谱图上,那么每两个相邻自振频率的间距也与基频相等。但实际上钢索振动时某些阶次的振动信号会很微弱,而在频谱图上看不到,造成两峰值值点之间的距离不相等,因此,以相邻两峰点之间的频率最小值作为基频,以主振频率Fn除以该基频值作为主振频率的阶次n。
2.2. 实际测量
针对斜拉索在恒定温度环境下收缩徐变较稳定、振动频率接近准确频率,在进行现场试验时选取温度较为稳定的时段如阴天或者夜晚进行,对拉索频率进行实时监测,同时考虑空气湿度、风速等一系列影响,需要对索拉力添加修正系数从而得到修正索力,以便对索力进行最优控制。使用动测仪测量频率现场作业以及换算所得索力如表1。

Table 1. Cable frequency and conversion cable force
表1. 斜拉索频率及换算索力表
根据修正索力与计算出的理论索力进行比较,结果如图1所示。
根据上述实际测量以及修正后的索力与理论值相比较,最大索力误差出现在1号索,为7.08%,未超过10%的限值,符合要求。该索力误差出现原因主要是由于拉索较短,对安装0号块梁段过程中桥面吊机等临时荷载变化较敏感,同时测量索力期间为冬季,现场风力较大,也对拉索频率影响较大。
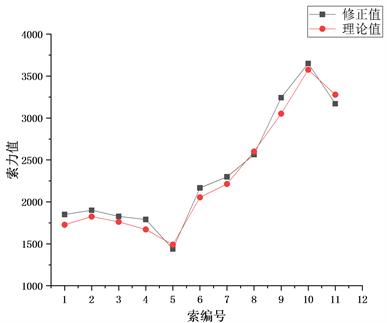
Figure 1. Comparison of modified cable force and theoretical cable force
图1. 修正索力与理论索力对比
3. 油压回归法测换算索力
在振动频率法测量过程中,千斤顶作为主要张拉装置,在测量索力过程中其油压表的读数一方面反映出实际张拉力T的数值,从而进一步验证确定,得到更加准确的比例系数K,另一方面该读数也可作为后期振动频率法实测索力的校核,以验证修正索力和修正系数的正确性。因此需要通过油压表建立回归方程求得千斤顶张拉力,即斜拉索张拉阶段的索力。
3.1. 建立回归方程
通过初始阶段千斤顶出厂油压与张拉力对应关系建立对应的回归方程如公式(6)。
(6)
其中:
F:钢索拉力(kN)
P:油压表读数(MPa)
c:经验系数
其中经验系数的确定根据斜拉索规格的变化而产生变化。在分级张拉的过程中,通过测定不同规格斜拉索所挂梁段的标高和里程等辅助手段来确定合理状态下油压表读数,从而建立相应的对应回归关系,根据实际数值确定不同规格斜拉索所对应的经验系数c如下表2所示。
Table 2. Cable frequency and conversion cable force
表2. 斜拉索频率及换算索力表
3.2. 实际测量
测定油压表读数需要在斜拉索张拉前到塔顶钢锚梁处,对分级张拉的千斤顶油压表进行现场校核,校核完毕开始张拉,每级张拉后等待约5 min,等油压表示数稳定后进行读数。测定油压表读数作业并根据读数运用回归方程换算所得索力值与理论索力值相比如下图2所示。
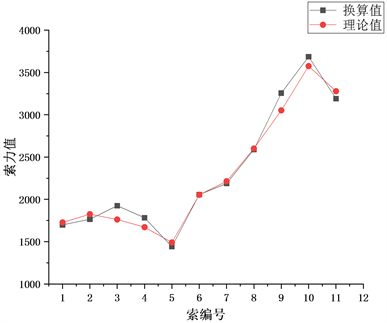
Figure 2. Comparison of converted cable force and theoretical cable force
图2. 换算索力与理论索力对比
根据上述实际测量以及换算后的索力与理论值相比较,最大索力误差出现在3号索,为9.28%,未超过10%的限值,符合要求。最大索力误差出现的原因主要是由于分级张拉阶段千斤顶张拉1,2号索过程中产生累积误差,尽管误差未超过施工要求限制,但仍对于油压表读数精确度产生影响,使精度降低。
4. 等效法测等效索力
由于施工过程中的临时荷载容易对索力造成影响,因此,施工过程中索力控制可以转化为引伸量的控制。张拉时,通过测量标记相对套筒出口的相对移动距离即可得到斜拉索伸长量,经过计算后即可得到等效张拉力。在后期调索过程中,调整量的张拉通过斜拉索的引伸量来控制。因此在对实际索力进行现场测量和校核的同时,可以通过测量斜拉索引伸量,得到等效索力以进行精细控制。
4.1. 理论基础
斜拉索由高强度钢绞线构成,容重较大,长度较长,具有较高的初始应力,在挂索后也保持一定垂度,将其等效成一根弦杆,只考虑拉索自重沿弦线垂直方向的影响。经此假定后可以推导出直线弦杆切线弹性模量(即Ernst等效弹性模量),从而进一步推导出索拉力和引伸量之间的函数关系,其公式如下:
(7)
其中:
Ee:斜拉索钢绞线弹性模量(MPa);
γ:斜拉索容重(N/m3);
L:斜拉索水平投影长度(m), ;
σ:斜拉索索力(MPa)
等效弹性模量的取值区间为(0, Ee)。当索力由T0变化到T1时,索长的变化量为 ,将等效弹性模量带入积分式得到下列公式:
(8)
通过该公式可知:当测得斜拉索引伸量时,已知斜拉索容重、切面面积、弹模以及索面塔端切线角便可求得等效索力。通过前期设计可知拉索数据如下表3所示。拉索弹性模量为2.05 × 105 MPa。
Table 3. Basic data of stay cables
表3. 斜拉索基本数据
4.2. 实际测量
在梁段合拢之后,根据施工现场实际情况,分别测量塔端和梁端斜拉索锚固端引伸量,结合出厂拉索长度结果可得索长实际变化量,根据等效索力公式计算得等效索力如图3所示。
根据上述实际测量以及计算后得到的等效索力值与理论索力值相比较,最大索力误差出现在6号索,为7.26%,未超过10%的限值,符合要求。出现最大误差的主要原因为调索过程中由于6号索所在梁段下方辅助墩支反力不便测量,导致梁段标高测量精确值偏差较大,从而影响斜拉索引伸量测量的精度。
5. 最优控制法控制最优索力
最优控制法的基本定义为使控制系统的性能指标实现最优化的基本条件和综合方法,可概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。从数学上看,确定最优控制问题可以表述为:在运动方程和允许控制范围的约束下,对以控制函数和运动状态为变量的性能指标函数(称为泛函)求取极值(极大值或极小值)。本工程方案旨在解决斜拉索索力最优控制问题,运用的主要方法为古典变分法,当出现误差,索力需要调整时,将索力误差定义成为泛函,通过对泛函求极值来对索力调整量进行最优控制。
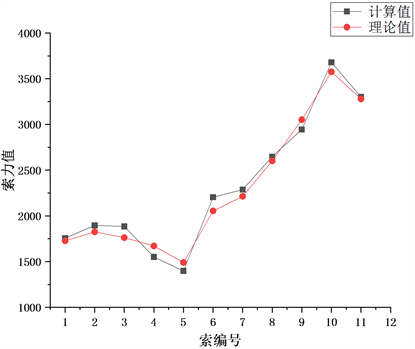
Figure 3. Comparison of converted cable force and theoretical cable force
图3. 换算索力与理论索力对比
5.1. 构建最优控制模型
国内外专家研究指出,模型预测控制的实现是通过建立优化问题的模型,求解该优化问题来得到控制器的输出。模型预测控制需要在每一个时间步通过反复的预测 + 优化来求解优化问题,当得到优化问题最优解后再将这个解作为真正的控制器的输出作用给被控对象,其关键在于如何定义优化问题。实现过程如下图4所示。
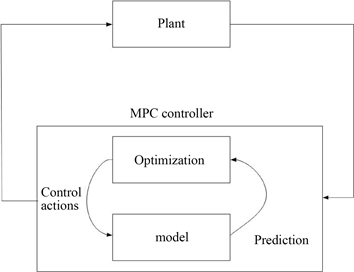
Figure 4. Realization process of model predictive control
图4. 模型预测控制实现过程
在最优控制里,通过求解优化问题,对输入进行比例积分微分运算,从而得到目标函数。最优控制数学模型如下:
(9)
其中:
:状态变量
:控制变量
L:目标函数
5.2. 优化结果控制索力
得到控制模型后,根据问题的需求来定义合适的目标函数。首先目标函数为与理论索力误差最小的索力值,之后对于状态变量定义为三种索力测量方法求解所得的三组索力值,控制变量的约束上下限定义为理论索力的±10%,使得目标函数最小,从而将其转化为优化问题。综合三组实测计算索力值,通过优化所得最优索力如下表4,图5所示。
Table 4. Comparison of controlled cable force and theoretical cable force of stay cable
表4. 斜拉索控制索力与理论索力对比
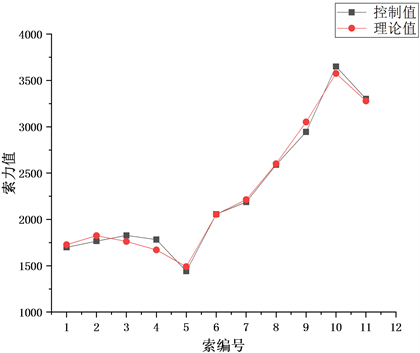
Figure 5. Comparison of controlled cable force and theoretical cable force
图5. 控制索力与理论索力对比
根据控制索力与理论值相比较,最大索力误差出现在4号索,为6.64%,未超过10%的限值,符合要求。通过最优控制法控制优化后的索力较之前三种索力实测方法所得索力与理论索力相比,整体误差与最大误差均减小,使得测量索力更加精确。
6. 结语
本文结合实际工程案例,运用三种斜拉桥现场索力测量方法,测得现场实际索力后通过最优控制法得到最优实测控制索力,得到如下结论:
1) 振动频率法将斜拉索振动近似作为弦的振动,通过明确弦的材料和长度后测量弦的振动频率确定弦的拉力。该方法便于对索力进行现场实时监测,其测量结果与理论索力值相差范围较为合理,可作为斜拉桥施工阶段索力实时监测的有效监测手段。
2) 油压回归法通过油压表读数建立回归方程求得千斤顶张拉力,即斜拉索张拉阶段的索力。作为振动频率法在拉索分级张拉阶段测量校核的重要依据,所得数据较为稳定,其测量数值也未超索力误差合理限值,在斜拉索张拉阶段可以在校核振动频率法所测索力的同时得到有效换算索力。
3) 等效法通过引入Ernst等效弹性模量,将斜拉索等效成一根弦杆,推导出索拉力和引伸量之间的函数关系,将索力等效转化为拉索引伸量,降低了索力测量难度的同时也提高了索力值精确度,因此该测量方法可作为梁段合拢后调索阶段索力的实际测量依据。
4) 针对三种测量方法中存在的局限,最优控制法将索力定义成为目标函数,将索力误差作为控制变量,把三种索力测量方法所得索力通过数学模型进行控制优化,提高了实测索力的精确度,减少了与理论索力之间的误差,实现了对实测索力值的优化。
文章引用
王九公,李树忱. 最优控制法对斜拉桥索力的控制机制
Optimal Control Method for the Control Mechanism of Cable Force for Cable-Stayed Bridge[J]. 土木工程, 2021, 10(03): 167-176. https://doi.org/10.12677/HJCE.2021.103019
参考文献
- 1. 严国敏. 现代斜拉桥[M]. 成都: 西南交通大学出版社, 1989.
- 2. 林元培. 斜拉桥[M]. 北京: 人民交通出版社, 1994.
- 3. Gimsing, S.J. (1997) Cable Supported Bridge. John Wiley, Chichester, 2-8.
- 4. Podolmy, W. and Scalzi, J.B. (1976) Construction and Design of Cable-Stayed Bridge. John Wiley, New York.
- 5. 黄灿. 基于几何控制法的大跨度斜拉桥自适应施工控制体系研究[D]: [博士学位论文]. 成都: 西南交通大学, 2011.
- 6. 颜东煌, 刘光栋. 确定斜拉桥合理施工状态的正装迭代法[J]. 中国公路学报, 1999, 12(2): 61-66.
- 7. 秦顺全. 分阶段施工桥梁的无应力状态控制法[J]. 桥梁建设, 2008(1): 8-14.
- 8. 向中富, 徐君兰, 代正宏. 悬索桥施工控制分析的恒定无应力索长迭代法[J]. 重庆交通学院学报, 2000(3): 16-21.
- 9. 王晟, 宁平华, 颜东煌, 等. 基于索长迭代法的斜拉桥合理施工阶段索力研究[J]. 公路工程, 2019, 44(3): 6-10, 32.
- 10. 王晟, 颜东煌, 宁平华, 等. 确定钢桁梁斜拉桥合理施工阶段索力的索长迭代法[J]. 中外公路, 2019, 39(3): 78-82.
- 11. 李乔, 卜一之, 张清华. 基于几何控制的全过程自适应施工控制系统研究[J]. 土木工程学报, 2009, 42(7): 69-77.