Open Journal of Acoustics and Vibration
Vol.02 No.03(2014), Article ID:15379,9
pages
10.12677/OJAV.2014.23003
Application Simulation of Active Noise Control in Dental Treatment
Bei Lu, Xinyao Chen, Yan Liu, Qi Tian
Zhabei Instritute of Preventive Dentistry, Shanghai
Email: lhding@sjtu.edu.cn
Received: May 16th, 2015; accepted: May 31st, 2015; published: Jun. 8th, 2015
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
This paper introduces the application of active noise control technology, and analyzes the fundamental of it. The paper points out that it is necessary to use a feedback control system when the original noise information can’t be reached. Since designing an adaptive feedback system can meet this requirement, the paper focuses on the FXLMS algorithm. Compared with traditional LMS algorithm, FXLMS algorithm can compensate the second channel in the dental device such as electromotor driven dental drill or air turbine driven drill, which LMS algorithm doesn’t take into account. At last, the paper analyzes the dental noise from dental drills and simulates the performance of FXLMS algorithm in different situations, such as different reference signals and different noises.
Keywords:Active Noise Control, Dental Noise, FXLMS Algorithm, Adaptive Feedback System
有源噪声控制在牙科治疗上的应用仿真
陆蓓,陈信耀,刘艳,田琦
上海市闸北区牙病防治所,上海
Email: lhding@sjtu.edu.cn
收稿日期:2015年5月16日;录用日期:2015年5月31日;发布日期:2015年6月8日

摘 要
本文介绍了有源噪声控制的应用,并分析了有源噪声控制的基本原理,指出在实际应用中对于无法测得有效的原噪声信号情况中,需要采用反馈控制系统。由于通过自适应反馈控制系统可以避免取得源噪声的相关信号,因而本文对于FXLMS算法进行分析,与传统LMS算法相比,FXLMS算法考虑了牙科设备如电机驱动牙钻或气动涡轮机驱动牙钻中的次级信道并进行了补偿,因而更加适用于牙科领域的自适应有源消声。文中最后对于牙科噪声进行探究,并给出不同参考信号与不同牙科噪声下的仿真结果。
关键词 :有源噪声控制,牙科噪声,FXLMS算法,自适应反馈系统

1. 引言
随着人类工业技术的日益发达,机械的噪声问题也逐渐走入了人们的视野。在日常生活中,人们会受到汽车噪声、飞机噪声、家用电器噪声的影响,这些噪声不但会让长期接触的人们产生耳聋等一些身体上的疾病,同时还会影响人们心理上的健康。因此,噪声指标也逐渐被列为衡量器械设备质量的一个重要指标。如何控制噪声也开始成为各行各业的制造商所需要考虑的一个问题,之后无源与有源噪声控制理论便被提出了。
经过多年的发展,噪声控制这项技术的理论已趋于成熟。目前噪声控制的方法主要分为无源噪声技术与有源噪声技术。吸声处理,隔声处理与消声器降噪技术都是属于无源噪声控制,这类传统噪声控制方法所能控制噪声的频段较窄,对控制中高频噪声较为有效,而对低频噪声的控制效果不大,从而使得其应用范围受到限制。为了解决这些问题,人们提出了有源噪声控制的概念。有源噪声控制的思想是利用两列频率相同、相位差固定的声波,叠加后会产生相加性或相消性干涉,从而使声能得到增强或减弱,利用声波相消性干涉来消除噪声。
随着噪声控制技术的发展,相关科技产品不断涌现,博士、飞利浦、森海塞尔等都推出了降噪耳机系列产品,降低外界噪声对音乐的影响。宝马、劳斯莱斯等在其高端车辆中使用局部降噪技术,降低发动机噪声、外界噪声对驾乘人员的影响。
在牙科应用中,牙钻的高速旋转钻头会产生刺耳的噪声,增加患者和牙医的压力、引发焦虑和烦躁情绪,长期处于牙钻的噪声环境下,甚至会影响听力。因此,如何利用噪声消除技术降低牙钻噪声的影响受到相关研究人员的关注 [1] 。
2. 有源噪声控制原理
2.1. 有源噪声控制的应用
有源噪声控制技术(Active Noise Control,简称ANC)起源于1933年德国物理学家Paul Leug向德国当局提出专利申请。在这项专利中,Leug利用了人们熟知的声学现象:两列频率相同、相位差固定的声波,叠加后会产生相加性或相消性干涉,从而使声能得到增强或减弱 [2] 。由于Leug的理论没有考虑声反馈、次级声通道等制约因素,按照其设想设计出来的系统无法正常工作。1953 年,美国RCA公司的Harry Olson和Everet May研究了在室内、管道内以及耳机内进行主动噪声控制的可行性。并由此提出了有源反馈控制结构 [3] 。
1956 年美国通用电气公司的William Conover将有源噪声控制技术应用于大型变压器噪声控制,使得有源噪声控制在实际中有了新的应用 [4] 。20世纪70 年代后期,法国科学家Jessel等推导了自由场三维空间的JMC有源消声算法 [5] 。并将其应用于大型变压器环境噪声的全空间降噪上。该理论表明任意一个声源的噪声辐射可控制曲面外无限空间声场,也可以控制曲面内有限区域。1980年,Chaplin 等人提出了具有自适应功能的有源控制系统。1981年J.C. Burgess率先采用Widrow等人提出的电噪声自适应抵消算法进行管道自适应有源噪声控制的仿真研究 [6] 。
2002年,德国伍帕塔尔大学与杜塞尔多夫防噪声研究所共同开发出一种以噪声治噪声的“安静岛”系统。在直径1.7米的“安静岛”四周安装一圈动圈式扬声器,在扬声器的外围再安装一圈拾音器。拾音器采集到的信号经过自适应处理器产生抵消信号,送到扬声器发射。据报道可降低噪声约20分贝由于横向滤波器(FIR)实施方便,FXLMS算法简单,因而在自适应有源消声的控制系统实现中得到了广泛应用 [7] 。
2.2. 有源噪声控制基本原理
有源噪声的基本原理是杨氏干涉原理,通过引入一个与原噪声(初级噪声)声波幅值大小相等、相位相反的次级声波,使其产生的声波与原来噪声的声波在一定区域内相互抵消,从而达到降低噪声的目的。
设初级噪声为:
 (2.1)
(2.1)
其中A表示声波振幅值,ω为角频率,k为波数,x表示空间位置,t表示时间。则平均声势能密度为:
 (2.2)
(2.2)
其中 为初级噪声声场的平均声压强度,ρ为介质的密度,c为声速。附加一个满足相干条件的次级声波:
为初级噪声声场的平均声压强度,ρ为介质的密度,c为声速。附加一个满足相干条件的次级声波:
 (2.3)
(2.3)
其中 表示次级声波的振幅值,β表示次级声波的初相位,两者叠加后得
表示次级声波的振幅值,β表示次级声波的初相位,两者叠加后得
 (2.4)
(2.4)
由消除噪声的原理知道由于初级噪声和次级声波相抵消,故 。将条件带回式(2.3)可得
。将条件带回式(2.3)可得 ,
, ,即次级声源与初级噪声振幅值相等,相位相反时,初级噪声与次级声源叠加后的声波的生势能密度最小,这意味着此时通过次级声波的作用,使得初级声波在一定区域内达到最大程度上的衰减,这就是有源噪声控制的基本原理。
,即次级声源与初级噪声振幅值相等,相位相反时,初级噪声与次级声源叠加后的声波的生势能密度最小,这意味着此时通过次级声波的作用,使得初级声波在一定区域内达到最大程度上的衰减,这就是有源噪声控制的基本原理。
在实际应用中不是任何情况下都能够测得有效的原噪声信号,当无法取得噪声信号时,我们则采用反馈控制系统,反馈控制系统不需要获取参考信号,即不需要取得源噪声的相关信号。其系统示意图如图1所示。
图中P为初级声源,S为次级声源,Ce为误差传感器, 为误差信号,
为误差信号, 为自适应控制器的输出信号。误差传感器在传感器所在位置处接收初级声源与次级声源的叠加信号
为自适应控制器的输出信号。误差传感器在传感器所在位置处接收初级声源与次级声源的叠加信号 ,并将
,并将 作为自适应反馈控制器的输入信号,自适应反馈控制器由误差信号
作为自适应反馈控制器的输入信号,自适应反馈控制器由误差信号 以及该控制器算法对初级声源做出先验的 估计信号
以及该控制器算法对初级声源做出先验的 估计信号 并将其作为输出。在该过程中自适应反馈控制器通过调节自身参数从而使误差
并将其作为输出。在该过程中自适应反馈控制器通过调节自身参数从而使误差 达到最
达到最

Figure 1. Illustration of adaptive active feedback control
图1. 自适应有源反馈控制系统示意图
小,从而达到降低初级声源噪声的目的。
值得一提的是是反馈控制系统其实是一种变相取得初级信号的系统,它是前馈系统的一种改变。自适应系统最核心的部件是自适应控制器,而自适应控制器中最核心的则是它的算法。由于横向结构的FIR实现相对比较简单,因此基于最小均方(Least Mean Square)算法的横向自适应滤波器在有源噪声控制中被广泛使用。并根据自适应噪声控制系统自身的技术特点发展出来了Filter-XLMS算法(简称FXLMS)。由于该算法运算简单而且性能相对较好,因此本文采用该算法作为后续设计中的有源噪声控制系统的算法。
3. Filter-XLMS算法
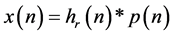
图2为采用了Filter-XLMS算法的自适应前馈控制系统框图。
其中 为初级通路,
为初级通路, 为参考通路,
为参考通路, 为次级通路,
为次级通路, 为控制器,
为控制器, 为初级信号,
为初级信号, 为次级信号,
为次级信号, 为经过初级通路的信号,
为经过初级通路的信号, 为误差信号,
为误差信号, 为参考信号,
为参考信号, 为滤波-X信号。由图2易知
为滤波-X信号。由图2易知
 (2.5)
(2.5)
由于 ,
, ,设滤波器长度为l,X(n)、W(n)分别为第n时刻的参考信号的向量形式与自适应控制器权系数的向量形式。则有
,设滤波器长度为l,X(n)、W(n)分别为第n时刻的参考信号的向量形式与自适应控制器权系数的向量形式。则有
 (2.6)
(2.6)
 (2.7)
(2.7)
故次级信号
 (2.8)
(2.8)
将式(2.8)带入式(2.5)可得
 (2.9)
(2.9)
为了求得滤波器的最佳系数,要设定一个需要达到的目标函数,然后由此推导出最有滤波器的传递函数。
Figure 2. Flow chart of adaptive feed forward control system with Filter-XLMS
图2. 采用了Filter-XLMS算法的自适应前馈控制系统框图
采用梯度估值的均方误差准则,并认为控制器权系数 在l长度内基本保持不变,有
在l长度内基本保持不变,有
 (2.10)
(2.10)
在这里,我们设
 (2.11)
(2.11)
其中 。
。
 信号称为滤波-X信号,而滤波-XLMS算法(FXLMS)即是得名于此。
信号称为滤波-X信号,而滤波-XLMS算法(FXLMS)即是得名于此。
于是按照最小均方误差算法的递推原则,即下一时刻的权向量等于该时刻的权向量减去一个正比于该时刻权向量梯度的变化量。可得
 (2.12)
(2.12)
其中 。
。
4. FXLMS算法在牙科治疗上的应用及仿真
4.1. 牙科噪声分析
对于传统的无源噪声控制由于其所能控制噪声的频段较窄,对于低频的噪声控制并不理想,其应用范围受到限制。为了解决这些问题,因而需要将ANC与PNC进行结合,使得其可以对于高频与低频的噪声均可以达到较好的去噪效果,因而更加适用于牙科应用。
目前用于牙科的牙钻频率主要在2 KHz到6 KHz之间,图3给出了电机驱动牙钻噪声与气动涡轮机驱动钻噪声的功率谱密度分布图,从图3中可以看出,电机驱动牙钻有两条主要噪声谱线这是由于牙钻设备有两个转动部分,分别是转轴与中间轴,这两部分会分布产生3.33 KHz与2.5 KHz的噪声,而气动涡轮机驱动钻则只有一个转轴产生6.66 KHz的噪声。
4.2. 牙科噪声控制仿真
4.2.1. 噪声影响分析
对于参考信号选用不同高斯噪声进行误差性能的仿真,即选取高斯噪声信号均值为0,方差为1与高斯信号均值为1,方差为1进行去噪误差性能对比仿真研究,如图4所示。
从图4中可见,对于均值更高的高斯参考噪声而言,初始误差较高,但是误差降低速率较快,同时

Figure 3. Noise test results of dental drill. (a) Eelectromotor driven dental drill; (b) Air turbine driven drill
图3. 牙钻噪声测试结果。(a) 电机驱动牙钻噪声;(b) 气动涡轮机驱动钻噪声

Figure 4. Simulation results of error performance under different Gaussian noise
图4. 不同参考高斯噪声下误差性能仿真
在误差稳定后误差略高于均值为0的高斯白噪声。而对于同样零均值,不同方差即不同幅度的高斯噪声同样进行误差性能仿真如图5所示。
从图5可知,高斯噪声幅度的增加会影响到FXLMS去噪算法的误差性能。高斯噪声幅度越高,去噪性能越差。
仿真时LMS滤波器权重因子的收敛曲线如图6所示,其中w1表示FIR滤波器第一个权重系数,从

Figure 5. Simulation results of error performance under different Gaussian noise
图5. 不同参考高斯噪声下误差性能仿真

Figure 6. Convergence of LMS filter with different weight factors
图6. LMS滤波器权重因子收敛曲线图
图6中可见,权重系统逐渐收敛,开始时变化较为明显,随后由于误差降低因而变化较为缓慢。
4.2.2. 频率影响分析
对于f = 2 kHz噪声的仿真效果从图7中可以看出,FXLMS算法对于原始信号可以实现去噪的功能,从图7频谱图可见,去噪后输出信号中没有2 KHz频点的噪声信号。
对于输入噪声的频率同时加入2 KHz与6 KHz,即模拟电机驱动牙钻噪声的真实情况,如图8所示,对于去噪后的输出信号可以将2 KHz与6 KHz处的噪声进行去除,得到较好的去噪效果。
5. 结论
本文首先介绍了有源噪声控制的基本原理,以及应用广泛的FXLMS算法。然后将有源噪声控制应

Figure 7. Spectrum of FXLMS
图7. FXLMS去噪性能仿真频域图

Figure 8. Spectrum of FXLMS
图8. FXLMS去噪性能仿真频域图
用到牙科治疗上,对于其在不同噪声水平和不同噪声频率下进行了仿真。仿真结果表明,FXLMS算法在不同噪声和频率条件下都可以有效抑制牙科噪声。
在后续工作中,我们将进一步探索FXLMS在牙科噪声消除上的应用,并在实际系统中验证其原理和性能,有效减轻牙钻噪声对病人的影响。
文章引用
陆 蓓,陈信耀,刘 艳,田 琦. 有源噪声控制在牙科治疗上的应用仿真
Application Simulation of Active Noise Control in Dental Treatment[J]. 声学与振动, 2014, 02(03): 19-27. http://dx.doi.org/10.12677/OJAV.2014.23003
参考文献 (References)
- 1. Kaymak, E., Atherton, M.A., Rotter, K.R.G., et al. (2007) Active noise control on high frequency narrow band dental drill noise: Preliminary results. 14th International Congress on Sound & Vibration, Cairns, 9-12 July 2007, 26.
- 2. 克安 (2003) 有源噪声控制. 国防工业出版社, 北京.
- 3. Olson, H.F. (1953) Electronic sound absorber. Journal of the Acoustical Society of America, 25, 1136.
- 4. Conover, W.B. (1956) Fighting noise with noise. Noise Control, 2, 78-92.
- 5. Chaplin, G.B.B., Powell, A.R. and Smith, R.A. (1983) Method of Reducing the Adaption Time in the Cancellation of Repetitive Vibration. US Patent 4417098.
- 6. 马永炜 (2010) 基于DSP的有源噪声控制方法研究. 硕士论文, 兰州理工大学, 兰州, 13 p.
- 7. 杨楠, 沙家正, 吴启学 (1992) 单指向性声源的空间有源消声. 应用声学, 5, 14-19.