Open Journal of Acoustics and Vibration
Vol.
08
No.
04
(
2020
), Article ID:
39228
,
13
pages
10.12677/OJAV.2020.84012
基于自适应反馈控制的座椅振动主动控制方法研究
申连洋1,吴磊2,丁亮3,文浩宇2*
1海装沈阳局驻哈尔滨第二军事代表室,黑龙江 哈尔滨
2哈尔滨工程大学动力与能源工程学院,黑龙江 哈尔滨
3中国船舶重工集团公司第七二五研究所,河南 洛阳

收稿日期:2020年11月18日;录用日期:2020年12月11日;发布日期:2020年12月18日

摘要
本文研制了一套座椅主动减振系统,通过抑制座椅下方基础结构上的低频线谱振动,降低振动向座椅的传递,从而提高座椅的舒适性。该系统将传感器与主动执行器集成在一起,形成传感作动一体化的智能吸振器。采用自适应反馈FxLMS算法作为控制策略,有利于提高该系统在不同应用环境中的适应性和稳定性。然而,该算法在应用中由于机械结构和控制系统中存在的非线性,容易造成高次谐波振动的放大现象。为此,本文提出一种参考信号的预处理方法,通过将参考信号转化为矩形波并提取高次谐波分量的方法合成新的参考信号,从而实现对高次谐波振动的抑制,以解决座椅振动主动减振中高次谐波的放大现象。为验证本文提出方法的有效性,在实验室中搭建了座椅减振试验验证平台,该平台以矩形钢板作为基础结构,以模拟振源作为初级激励。试验结果表明本文提出的方法在实现基频振动大幅降低的同时,可有效解决座椅主动减振中出现的高次谐波放大问题。
关键词
座椅减振,主动控制,智能吸振器,自适应反馈控制

Research on Seat Vibration Active Control Method Based on Adaptive Feedback Control
Lianyang Shen1, Lei Wu2, Liang Ding3, Haoyu Wen2*
1The Second Military Representative Office of DNE Shenyang Bureau in Harbin, Harbin Heilongjiang
2College of Power and Energy Engineering, Harbin Engineering University, Harbin Heilongjiang
3Luoyang Ship Material Research Institute, Luoyang Henan

Received: Nov. 18th, 2020; accepted: Dec. 11th, 2020; published: Dec. 18th, 2020

ABSTRACT
In this paper, an active vibration control system of the seat is developed, which can reduce the transmission of vibration to the seat by suppressing the low-frequency harmonic vibration on the infrastructure underneath the seat, thus improving the comfort of the seat. The system integrates sensors with active actuators to form an intelligent vibration absorber with integrated sensing action. The adaptive feedback filter LMS algorithm is used as the control strategy to improve the adaptability and stability of the system in different application environments. However, the higher-order harmonic vibration may deteriorate due to the non-linearity in the structure and the control system. To alleviate the phenomenon, a pre-processing method of reference signal is proposed, which synthesizes the new reference signal by converting the reference signal into rectangular wave and extracting high-order harmonic components, so as to suppress the high-order harmonic vibration and solve the amplification phenomenon of the high-order harmonic in the active vibration reduction of the seat. A verification platform for seat vibration reduction test is built in the laboratory, which uses rectangular steel plate as the foundation structure and simulated vibration source as the primary excitation. The test results show that the higher-order harmonics of the foundation structure and the seat is significantly reduced when the fundamental frequency vibration is well controlled.
Keywords:Seat Suspension, Active Control, Intelligent Vibration Absorber, Adaptive Feedback Control

Copyright © 2020 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 前言
对于飞机、船舶及车辆等交通运输工具而言,影响乘坐舒适性的关键之一便是座椅。驾乘人员长时间保持坐姿,极易产生疲劳,座椅的振动会加剧驾乘人员的不适感。在军事领域,座椅的振动会对驾乘人员造成心理和生理上的负面影响,直接影响士兵的战斗力。座椅的振动也是导致很多驾乘人员患有颈椎、腰椎类疾病的重要原因之一。统计结果表明,坦克乘员的腰痛发病率为73.7%,明显腰痛者达到48.4%,且从业时间越长,发病率越高、程度越重 [1]。直升机飞行员患有腰部疾病和脊柱异常疾病的情况也非常普遍,且随着飞行次数和飞行时间的增加,发病率升高 [2]。因此,作为振动的主要传递途径,座椅的减振性能非常重要,它直接决定了振动传递到座椅乃至最终传递到驾乘人员的振动量级。如何设计和优化座椅的减振系统一直以来是座椅减振研究的热点之一。
传统的座椅减振系统属于被动减振范畴,具有结构简单、安全可靠、经济性好等优点,应用广泛。但是受传统减振器高静态刚度和低动态刚度矛盾的限制,被动减振座椅对低频振动的控制效果普遍较差。而且被动减振座椅的刚度和阻尼不可调,不同工况环境下的减振效果会有所不同,适应能力差。
高静态刚度和低动态刚度的矛盾是被动减振系统的痼疾,为解决这个问题,采用高静态刚度低动态刚度同时满足的非线性减振系统 [3] [4] [5] 是一个解决思路,但目前缺乏适于工程应用的研究和验证。针对被动减振座椅刚度和阻尼不可调问题,国内外学者采用半主动控制的方法来实现刚度和阻尼的在线调整,以适应不同工况的振动控制,如基于磁流变 [6] 和电流变液 [7] 的半主动减振座椅的研究。相比而言,基于磁流变阻尼器 [6] [8] [9] [10] 的半主动控制系统已经有很成熟的产品问世。
与非线性减振和半主动减振不同,主动减振通过引入次级振源产生与源振动幅值相同、相位相反的振动实现对低频振动的良好抑制。同时由于主动减振座椅采用实时振动信号反馈,因此对不同的工况有很好的适应能力。鉴于对低频良好的抑制能力和不同工况的适应能力,主动减振座椅的研究一直受到国内外学者 [11] - [22] 的青睐,次级振源既有传统的伺服电机带动滚珠丝杠 [11] [12] [13]、气动式 [14]、电磁式 [15] 等作动机构,也有基于压电材料 [16] [17] 等功能材料的新型作动机构。
本文基于前期的研究基础,研制了应用于座椅的主动减振系统。该控制系统采用自适应FxLMS算法,保证振动主动控制系统在工程应用中有更好的环境适应能力,同时具备较好的稳定性。然而由于机械结构和控制系统中存在的非线性,基于FxLMS算法的座椅主动减振系统会出现高次谐波的放大现象。为了解决该问题,本文提出一种对参考信号的预处理方法,通过将参考信号转化为矩形波并提取高次谐波分量的方法合成新的参考信号,从而在控制基频振动的同时实现对高次谐波振动的抑制。
2. 座椅振动主动控制机理
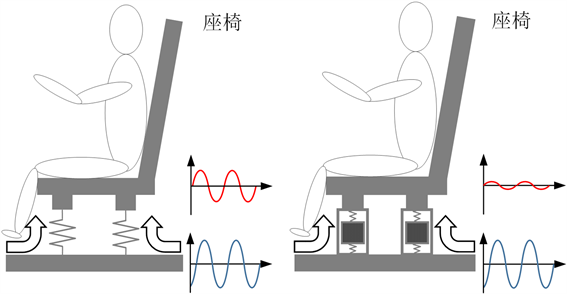
类似汽车、直升机这样的运载工具,通常在舱室内的座椅和基础地板之间安装被动减振装置,振动传递示意图如图1所示。对于不同种类的运载工具,主要振源的类型也有所区别。例如:汽车的振动主要来自发动机和路面、直升机的振动则主要来自旋翼,除此之外,振动在传递过程中还会受到舱室结构特性的影响。因此,振动的传递过程可以概括为“振源—结构—座椅”,为了提高座椅的舒适性,振动的治理工作可以分别从以上三个方面着手。但是直接消除振源的振动目前存在技术瓶颈,无法实现,修改传递振动的机械结构则需要付出较大的代价,可能会影响机械结构其它方面的性能。从提高座椅舒适性的角度出发,直接治理座椅振动更具有针对性,是目前座椅减振的主要研究方向。
 (a) (b)
(a) (b)
Figure 1. Schematic of vibration transfer (a) Passive vibration-absorbing seat; (b) Active vibration-absorbing seat
图1. 振动传递示意图:(a)被动减振座椅;(b)主动减振座椅
与被动减振不同,本文研制的主动座椅减振系统采用了振动波叠加的原理,利用次级振源产生的振动来抵消座椅下方基础结构上的振动,阻止振动向座椅传递,其原理如图1(b)所示。振动主动控制的技术优势在于低频段(10~315 Hz)特征谱线频率的振动抑制效果非常明显,能够更具针对性地消除低频振动对驾乘人员身心健康的不利影响。
3. 控制策略
3.1. FxLMS算法
本文采用自适应FxLMS算法作为座椅主动减振系统的控制策略,控制算法以误差信号的最小均方根为收敛目标,通过最陡下降法寻找最优控制解 [21]。经典的单通道自适应前馈FxLMS算法框图如图2所示,自适应寻优过程即为控制权向量 的迭代过程,可表示为:
(1)
将初级激励作为参考信号 ,即为前馈控制。由于信号经过实际的物理通道后会产生一定的时间延迟和相位突变,因此需要对算法中的参考信号加入补偿滤波,滤波后的参考信号为 。补偿滤波器即为次级通道的脉冲响应函数(也称为次级通道权系数),可以通过自适应系统辨识的方式获得。
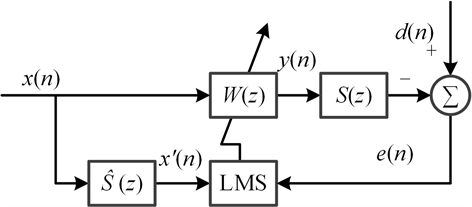
Figure 2. Block diagram of FxLMS algorithm for single-channel adaptive feed forward control
图2. 单通道自适应前馈FxLMS算法框图
该算法可简单地归纳如下:
(2)
在座椅所处的实际环境中,振源的情况通常比较复杂,座椅的振动还要受到传递途径的影响,因此以初级激励作为参考信号是比较困难的。相比之下,采用反馈控制策略则更为合适,即以图2中的期望信号 作为参考信号。在实际的振动主动控制系统中,传感器采集的误差信号是初级激励响应和次级激励响应的叠加,在启动主动控制系统后,随着次级控制力的逐渐建立,误差信号中被控频率的幅值会逐渐降低。因此需要在算法中将误差信号中的次级激励响应去除,重构出稳定的期望信号作为参考信号。本文所研制的座椅主动减振系统为双通道控制,座椅下方的两台智能吸振器之间存在明显的耦合关系,因此应采用考虑耦合的LMS算法。图3给出了考虑耦合的双通道自适应反馈滤波LMS算法框图,其中 和 是原点次级通道脉冲响应函数, 和 是耦合次级通道脉冲响应函数。
次级通道权系数一般采用自适应系统辨识的方式获取,辨识方法可以分为在线辨识和离线辨识。在线辨识多适用于线性时变被控系统,在次级控制力的收敛过程中不断更新次级通道权系数,可以保证次级通道权系数的准确性。离线辨识则适用于线性时不变被控系统,当被控系统为静态时,提前辨识出系统的次级通道权系数。在本文研究的座椅减振问题中,采用离线辨识的方法获得系统次级通道权系数。
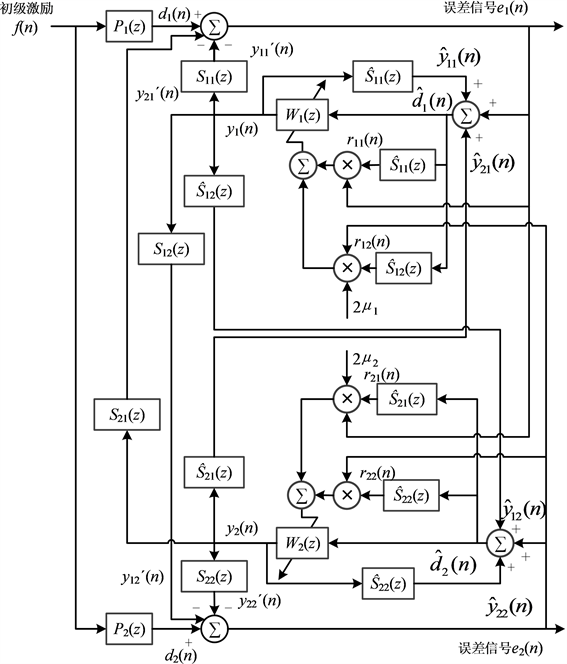
Figure 3. Block diagram of LMS algorithm for dual channel adaptive feedback control
图3. 双通道自适应反馈控制LMS算法框图
此时,控制权系数的迭代过程可以表示为
(3)
其中,滤波后的参考信号可以表示为
(4)
其中,参考信号可以表示为
(5)
3.2. 座椅主动减振系统中高次谐波放大现象
采用FxLMS进行座椅振动主动控制时,参考信号来源于误差传感器,这时参考信号中基频分量幅值远高于高次谐波,这造成控制滤波器中高次谐波分量迭代更新速度远低于基频分量迭代速度。以反馈控制为例,误差信号中高次谐波分量的幅值比基频分量低30 dB以上,这就导致控制滤波器中高次谐波分量几乎不更新,控制信号中也没有相应的频率成分。与此同时,由于被控机械结构、作动传感系统、功率放大器等存在的非线性,导致作动器激励起高次谐波成分,该谐波振动与源振动的相位存在随机性,当相位在−90˚~90˚范围内时,两者相互叠加会使得高次谐波振动增大。当采用信号发生器产生的单频信号作为参考信号时,这种情况会更加严重。
为了解决座椅主动减振中发生的上述高次谐波振动放大问题,需要在参考信号中引入高次谐波成分,并能够调节参考信号中高次谐波分量的幅值,该过程可视作对参考信号的预处理。
3.3. 参考信号预处理方法
本文提出一种对参考信号预处理的方法,以解决座椅主动减振高次谐波振动放大问题。该方法使用矩形波发生器从参考信号中提取矩形波,再通过带通滤波器组将需要控制的谐波分量提取出来,其基本原理示意图见图4。

Figure 4. A schematic of pre-processing on reference signal
图4. 参考信号预处理原理示意图
其中矩形波发生器假设原始参考信号满足下式:
(6)
则矩形波发生器的输出为 满足下式:
(7)
这里的 为用于生成矩形波的阈值,矩形波发生器的输出 可根据式(7)进行逐点赋值。矩形波生成原理见图5。
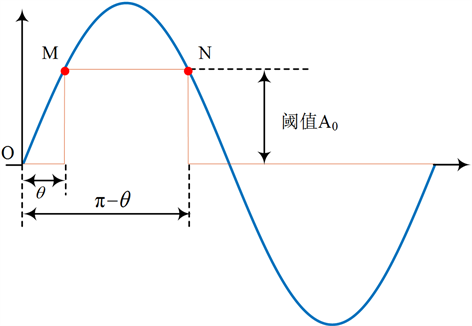
Figure 5. Principle of generating square wave
图5. 矩形波生成原理
假设矩形波的占空比为D,则由图5可知,占空比D和阈值 之间满足下式:
(8)
将式(8)代入式(7)可得:
(9)
经过矩形波发生器产生矩形波后,使用带通滤波器组将各个中心频率设置为高次谐波对应的频率,同时根据需要调整增益 对各个高次谐波进行放大。
4. 座椅主动减振试验验证
4.1. 座椅主动减振台架介绍
为验证本文提出方法在座椅主动减振系统中的有效性,在实验室环境下搭建了座椅主动减振试验系统,系统示意图如图6所示。台架的基础结构为一块1.5 × 2.0 m的钢结构矩形平板,平板下方由4个橡胶隔振器作为弹性支撑,以此模拟座椅的实际环境。作为模拟振源,四个相同的激振器对称分布在基础平板上。定义左侧的作动器和传感器为1号,右侧的作动器和传感器为2号。
如图7所示为本文研制的座椅主动减振系统实物样机,该系统由三部分构成:控制器、电源及信号调理箱、智能吸振器。DSP控制器具备上位机控制和脱机运行两种工作模式,上位机控制模式主要用于系统安装后的调试,确定最佳控制参数后,在DSP脱机运行模式下,一键启停便于日常使用。电源及信号调理箱中集成了分压整流模块和信号滤波模块,分压整流模块可以通过定制化设计适应各种不同的应用环境。
智能吸振器内部为电磁式惯性作动器和加速度传感器,功率放大器安装在智能吸振器内侧外壁上。功率放大器的外置式设计有利于散热,便于拆装维护,同时可以整合传感和作动的信号接口。电磁式惯性作动器的主要性能指标如表1所示,经过测试,作动器的出力密度可以达到124,000 N2/(Wm3),且工作频带内的失真度均在5%以内。
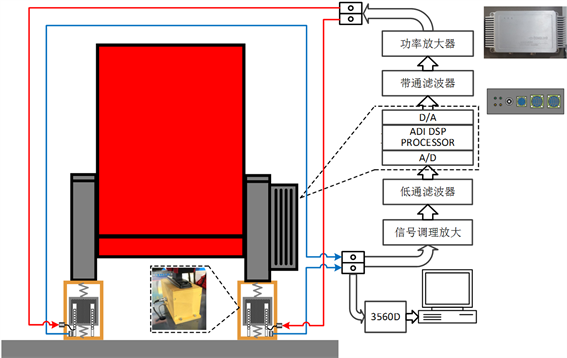
Figure 6. Schematic diagram of test plan for seat active vibration reduction system
图6. 座椅主动减振系统试验方案示意图

Figure 7. Active seat vibration reduction system prototype
图7. 座椅主动减振系统实物图

Table 1. Main performance indicators of electromagnetic inertial actuators
表1. 电磁式惯性作动器的主要性能指标
4.2. 次级通道辨识
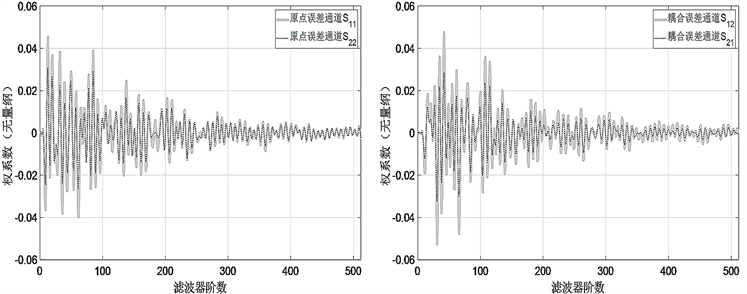
首先采用离线辨识的方法进行次级通道系统辨识,辨识的激励信号为0~200 Hz高斯白噪声。由于两路控制通道之间存在耦合,可以得到4组次级通道权系数,辨识结果如图8所示,权系数为512阶。
 (a) (b)
(a) (b)
Figure 8. Identification results of secondary-path: (a) Origin secondary-path identification results: (b) Coupling secondary-path identification results
图8. 次级通道权系数辨识结果:(a)原点次级通道辨识结果;(b)耦合次级通道辨识结果
在次级通道对比结果中可以发现,两组原点次级通道权系数和两组耦合次级通道权系数的形状均非常相似,其中1号通道对应权系数的幅值均大于2号通道。权系数形状相似说明控制系统的两路次级输出在基础结构上激起的振动响应是近似相同的,这主要是因为两台智能吸振器在基础结构上的实际位置比较接近。权系数形状相似,但幅值不同,主要原因有两点:
1) 两路控制通道之间的实际物理环节所有不同,例如:功率放大器的放大倍数、作动器动子的响应等等;
2) 系统辨识时,所有次级通道权系数的初始值都为512阶零向量,经过不同的收敛时间,权系数的幅值必然有所区别。
对比原点次级通道权系数和耦合次级通道权系数可以确认,由于两台智能吸振器的位置比较接近,控制系统的两路输出通道之间存在非常强的耦合作用。
4.3. 基于FxLMS算法的座椅主动减振
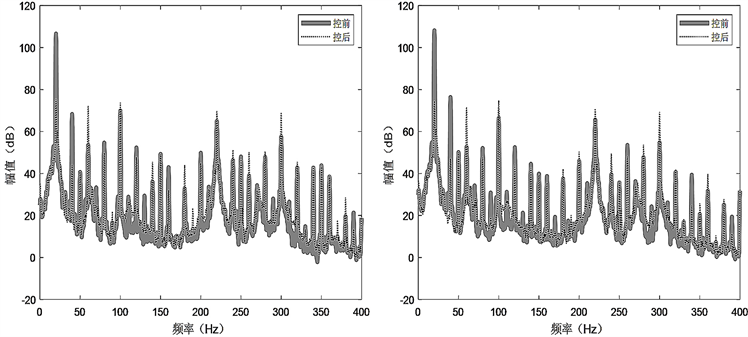
采用基于FxLMS算法的控制策略进行座椅主动减振。启动模拟振源,设置激振频率为20 Hz,记录误差点的振动响应。然后运行振动主动控制系统,调整合适的收敛系数,待收敛稳定后记录误差点的振动响应。振动主动控制效果如图9所示。
开启振动主动控制前,基础平板上的振动响应以20 Hz为主。初级激励源为单频信号,振动响应中出现高次谐频,这是由于实际的物理系统中存在的非线性特性引起的。此外,受电源干扰的影响,误差信号中存在较弱的50 Hz干扰,这个量级的干扰不会影响主动控制,可以忽略。
开启振动主动控制前后,两个误差点在各个特征频率及0~200 Hz频段的振动加速度级见表2。从表中可以看出,两个误差点在20 Hz处的振动量级明显下降,振动衰减量分别为31.0 dB和33.6 dB。在0~200 Hz频带内,1号误差点和2号误差点的总振级衰减分别为27.6 dB和29.2 dB。然而,部分高次谐波振动在主动控制开启后反而出现放大现象,如60 Hz (3倍频)、100 Hz (5倍频)处。尤其是在60 Hz处,振动放大现象尤为明显。
 (a) (b)
(a) (b)
Figure 9. Active vibration control results using FxLMS (thick solid line: before control, fine dashed line: after control) (a) Point 1; (b) Point 2
图9. 基于FxLMS算法的振动主动控制效果(粗实线:控前,细虚线:控后) (a) 1号点;(b) 2号点
Table 2. Activevibration controlresults
表2. 振动主动控制效果
4.4. 基于参考信号预处理方法的座椅主动减振
为了解决座椅主动减振中高次谐波振动的放大现象,本文针对座椅主动减振系统采用3.3节中提出的参考信号预处理方法。采用式(9)构造矩形波,其中占空比D选取为0.5,以消除偶数阶谐波干扰。滤波器组选取两个二阶带通滤波器,其传递函数表达式为:
(10)
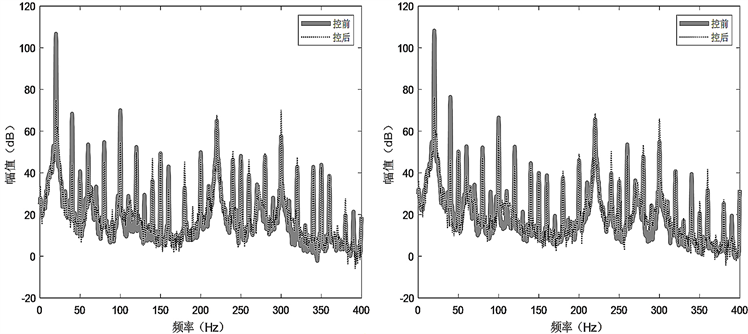
其中 ,fs为采样频率, , 为滤波器的中心频率, ,。当 时,式(10)实际上等价于单自由度质量–弹簧–阻尼系统的频率响应函数,此时 为质量–弹簧系统的固有频率,决定了滤波器的中心频率, 为阻尼比,决定着滤波器的带宽。两个带通滤波器的中心频率分别为60 Hz和100 Hz,以滤出3、5次谐波分量。调节这两阶谐波分量的权重,使得其具有与基频相近似的收敛速度,得到两个误差相应点的控制效果见图9。各特征频率及10~200 Hz频段控制效果见表3。
 (a) (b)
(a) (b)
Figure 10. Active vibration control results based on pre-processing of error signal (thick solid line: before control, fine dashed line: after control) (a) Control effect of point 1; (b) Control effect of point 2
图10. 基于参考信号预处理方法的振动主动控制效果(粗实线:控前,细虚线:控后) (a) 1号点控制效果;(b) 2号点控制效果
Table 3. Active vibration control results based on pre-processing of error signal
表3. 基于参考信号预处理方法的振动主动控制效果
从图10和表3可以看出,采用基于参考信号预处理方法后,两个误差点在20 Hz的控制效果与未采用该方法的控制效果几乎一致,这表明本文提出的方法不会影响对基频的振动控制。从控制效果还可以看出,采用本文提出的方法,1号误差点在60 Hz和100 Hz处的振动衰减量由之前的−18.8 dB和−19.1 dB提升至10.3 dB和15.1 dB,2号误差点在60 Hz和100 Hz处的振动衰减量由之前的−18.8 dB和−19.1 dB提升至14.0dB和8.6 dB。由于受到DSP硬件计算能力的限制,试验中未考虑更高次谐波的振动控制。
5. 结论
本文研制了一套应用于座椅的主动减振系统,主要用于抑制座椅上的低频振动,降低低频振动对人体的伤害。针对基于FxLMS算法进行座椅主动减振所出现的高次谐波放大现象,本文提出了一种对误差信号进行预处理的方法,该方法通过从误差信号中提取矩形波并使用滤波器组进行重构的措施,在保证基频振动控制效果的同时,解决了高次谐波振动的放大问题,提升了座椅主动减振的控制效果。
文章引用
申连洋,吴 磊,丁 亮,文浩宇. 基于自适应反馈控制的座椅振动主动控制方法研究
Research on Seat Vibration Active Control Method Based on Adaptive Feedback Control[J]. 声学与振动, 2020, 08(04): 97-109. https://doi.org/10.12677/OJAV.2020.84012
参考文献
- 1. 路闯, 叶应荣, 袁宏伟, 张建党. 坦克乘员552名腰痛状况分析[J]. 临床军医杂志, 2002, 30(1): 34-35.
- 2. Bongers, P.M., Hulshof, C.T., et al. (1990) Back Pain and Exposure to Whole Body Vibration in Helicopter Pilots. Ergonomics, 38, 1007-1026. https://doi.org/10.1080/00140139008925309
- 3. Wan, Y. and Schimmels, J.M. (2003) Improved Vibration Isolating Seat Suspension Designs Based on Position-Dependent Nonlinear Stiffness and Damping Characteristics. Journal of Dynamic Systems, Measurement, and Control, 125, 330-338. https://doi.org/10.1115/1.1592189
- 4. Le, T.D. and Ahn, K.K. (2011) A Vibration Isolation System in Low Fre-quency Excitation Region Using Negative Stiffness Structure for Vehicle Seat. Journal of Sound and Vibration, 330, 6311-6335. https://doi.org/10.1016/j.jsv.2011.07.039
- 5. Wang, Y., Li, S.M., Cheng, C., et al. (2018) Adaptive Control of a Vehicle-Seat-Human Coupled Model Using Quasi-Zero-Stiffness Vibration Isolator as Seat Suspension. Journal of Me-chanical Science and Technology, 32, 2973-2985. https://doi.org/10.1007/s12206-018-0601-2
- 6. Gad, S., Metered, H., Bassuiny, A. and Abdel Ghany, A.M. (2014) Vibration Control of Semi-Active MR Seat Suspension for Commercial Vehicles Using Genetic PID Controller. 10th International Conference on Vibration Engineering and Technology of Machinery, Vol. 23, 721-732. https://doi.org/10.1007/978-3-319-09918-7_64
- 7. Choi, S.B. and Han, Y.M. (2007) Vibration Control of Elec-trorheological Seat Suspension with Human-Body Model Using Sliding Mode Control. Journal of Sound and Vibration, 303, 391-404. https://doi.org/10.1016/j.jsv.2007.01.027
- 8. 孙启超. 坦克座椅减振控制研究[D]: [硕士学位论文]. 长沙: 中南大学, 2007.
- 9. 陈嘉豪. 坦克座椅磁流变隔振器设计与性能测试[D]: [硕士学位论文]. 南京: 南京理工大学, 2016.
- 10. 王迪. 面向直升机座椅系统的磁流变阻尼器半主动隔振问题研究[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2014.
- 11. Stein, G.J. and Ballo, I. (1991) Active Vibration Control System for the Driver’s Seat for Off-Road Vehicles. Vehicle System Dynamics, 20, 57-58. https://doi.org/10.1080/00423119108968980
- 12. Kawana, M. and Shimogo, T. (2013) Active Suspension of Truck Seat. Shock & Vibration, 5, 35-41. https://doi.org/10.1155/1998/579025
- 13. Abe, Y., Oshinoya, Y. and Ishibashi, K. (2002) Active Suspension of Truck Seat: Theoretical Considerations Using Coefficient Diagram Method. The Proceedings of Conference of Kanto Branch, Funabashi, 13-15 March 2002, 189-190.
- 14. Ning, D.H., Sun, S.S., Li, H.Y., Du, H.P. and Li, W.H. (2016) Active Control of an Innovative Seat Suspension System with Acceleration Measurement Based Friction Estimation. Journal of Sound and Vibration, 384, 28-44. https://doi.org/10.1016/j.jsv.2016.08.010
- 15. Maciejewski, I., Meyer, L. and Krzyzynski, T. (2010) The Vibration Damping Effectiveness of an Active Seat Suspension System and Its Robustness to Varying Mass Loading. Journal of Sound and Vibration, 329, 3898-3914. https://doi.org/10.1016/j.jsv.2010.04.009
- 16. Chen, Y., Mickramsinghe, V. and Zimcik, D.G. (2011) Develop-ment of Adaptive Helicopter Seat for Aircrew Vibration Reduction. Journal of Intelligent Material Systems and Struc-tures, 22, 489-502. https://doi.org/10.1177/1045389X11400343
- 17. Chen, Y., Mickramsinghe, V. and Zimcik, D.G. (2009) Devel-opment of Adaptive Seat Mounts for Helicopter Aircrew Body Vibration Reduction. Journal of Vibration and Control, 15, 1890-1825. https://doi.org/10.1177/1077546309103275
- 18. 金先龙, 朱碧海. 汽车座椅振动最优控制的电模拟[J]. 武汉汽车工业大学学报, 1999, 21(1): 24-26.
- 19. 刘会英, 盖玉先, 郑超. 汽车座椅主动振动控制与仿真分析[J]. 中国机械工程, 2006, 22(4): 1227-1230.
- 20. 张连莹. 汽车座椅振动控制及仿真分析[D]: [硕士学位论文]. 青岛: 青岛大学, 2018.
- 21. 刘衫. 车辆座椅隔振系统的主被动控制研究[D]: [硕士学位论文]. 济南: 山东大学, 2018.
- 22. 杨铁军, 靳国永, 刘志刚. 船舶动力装置振动的主动控制[M]. 哈尔滨: 哈尔滨工程大学出版社, 2011.