Geomatics Science and Technology
Vol.06 No.02(2018), Article ID:23702,11
pages
10.12677/GST.2017.62006
The Application of MetroIn_DPM System in the Deformation Monitoring of Large Structures
Yongchao Li1, Liang Che2, Jianjun Li1, Wenliang Tong1
1Shandong Province Daizhuang Coal Mine, Weishan Shandong
2Shandong Jinan Real Estate Surveying and Mapping Institute, Jinan Shandong

Received: Jan. 19th, 2018; accepted: Feb. 2nd, 2018; published: Feb. 8th, 2018

ABSTRACT
The MetroIn_DPM digital near-view industrial photogrammetry system and the simulation experiment of Axyz/MTM theodolite industrial measurement system were carried out in the laboratory to demonstrate the feasibility of the MetroIn_DPM system applied to the project. In addition, MetroIn_DPM digital close-range industrial photoelectric measurement system was used to monitor the gas station tent and column, and the deformation and trend of the gas station tent were obtained.
Keywords:Industrial Photogrammetry, Image Processing, Theodolite Measurement System, Deformation Monitoring, Optimum Exposure Strength
MetroIn_DPM系统在大型建构筑物形变监测中的应用研究
李永超1,车亮2,李建军1,佟文亮2
1山东省岱庄生建煤矿,山东 微山
2山东济南市房产测绘院,山东 济南
收稿日期:2018年1月19日;录用日期:2018年2月2日;发布日期:2018年2月8日

摘 要
应用MetroIn_DPM数字近景工业摄影测量系统及Axyz/MTM经纬仪工业测量系统在实验室内进行的模拟实验,论证了MetroIn_DPM系统应用于工程项目的可行性;并应用MetroIn_DPM数字近景工业摄影测量系统对加油站罩棚及立柱进行了监测实践,得到了加油站罩棚的变形量及趋势。
关键词 :工业摄影测量,图像处理,经纬仪测量系统,形变监测,最佳曝光强度

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
MetroIn_DPM是由解放军信息工程大学研制的一套数字近景工业摄影测量系统,包括图像数据处理软件 [1] 、数码相机、环形闪光灯、人工标志以及定向靶等。该系统操作简单,只需测量人员对被测物布设回光反射标志,用数码相机对布设的标志进行拍摄,通过图像处理软件解算出测量点的三维坐标 [2] - [8] 。主要用于小型工业设备的测量。
本文结合岱庄生建煤矿域内某加油站罩棚的形变监测,对MetroIn_DPM系统在大型建构筑物形变监测中的应用进行了研究。通过室内的实验及对加油站罩棚形变的实测分析,验证了该系统用于大型建构筑物形变监测是可行的,其测量精度可满足形变监测的要求。
2. MetroIn_DPM系统用于远距离测量的可行性论证
MetroIn_DPM系统主要用于近距离摄影测量。由于加油站罩棚边缘距离支柱有5~6 m远,且加油站罩棚有8 m高。为了可以同时拍到支柱及罩棚点,必须进行远距离拍摄。在远距离拍摄条件下该系统能否满足监测的精度要求,为此首先在实验室内进行了方案的可行性实验。实验内容包括:1) MetroIn_DPM摄影测量系统在不同拍摄距离下的曝光度调节测试;2) 同时采用Leica的TM5100A经纬仪测量系统及MetroIn_DPM摄影测量系统进行测量,对MetroIn_DPM系统的测量精度进行对比分析。
2.1. 实验场地测量点的布设
将圆形测量点标志和点状编码标志粘贴在实验室内凹凸面墙上,在实验墙上分5列共粘贴30个编码标志,50个圆形测量点标志(见图1所示)。30个编码标志的空间分布位置见图2。
由于编码标志作为不同像片之间的公共点,以实现不同像片的拼接,两张照片至少有6个公共编码标志,所以拍摄时各编码标志粘贴的距离不能太大。回光反射标志都是非常规则的圆形,在实验中,可将反光标志同时作为Axyz/MTM工业测量系统的测量点使用,另外编码标志是多个点的点集,摄影测量中识别解算的点是标志中心圆点的坐标,所以经纬仪测量系统应瞄准编码标志中间圆点的中心进行测量。
2.2. 闪光灯照度、相机光圈及快门速度与拍摄距离关系的测试
获得满足要求的高质量像片的关键是掌握好曝光强度,因此在对测量对象进行拍摄时,必须根据

Figure 1. The experimental wall with a reflective marker
图1. 粘贴反光标志的实验墙

Figure 2. Spatial distribution of 30 coded signs
图2. 30个编码标志的空间分布图
距离的远近、周围环境的亮度进行闪光灯照度、相机光圈及快门速度的调节,获得最佳曝光强度,从而获取高质量的像片。本次实验分别在距离实验墙4~5 m、10~12 m处进行拍摄,测试在不同位置的最佳闪光灯照度、相机光圈及快门速度。
实验中在不同拍摄距离时,分别将闪光灯照度设置为1/1、1/2、1/4、1/8四个等级,快门速度分1/200、1/320、1/400三个等级,并选取不同的光圈进行拍摄。依据像片的曝光强度选取最佳的组合方案。由于MetroIn_DPM系统是通过拍摄编码标志、回光反射标志及定向靶的反光影像,经图像识别出各反光点的中心,然后解算出各点三维坐标。其对各反光点的识别精度取决于反光点影像的灰度值。而影像中反光点的灰度值的大小主要取决于闪光灯照度、相机光圈及快门速度。通过实验发现,在近距离拍摄时,外部光线亮度对拍摄质量影响不大。但在白天进行远距离拍摄时,外部光亮对拍摄影像的质量影响较大。由于天气的阴晴,室内亮度变化较大,拍摄时反光点的反射强度难以控制。为减小外部光线的影响,拍摄时间改在晚上进行,取得了很好的效果。
另外通过对像片的处理发现,过低的曝光强度使得像片内像点灰度值较低,导致软件无法识别反光标志和定向靶。而曝光强度过高会导致编码标志中的反光点相连或间距太小,以及定向靶圆环以实心圆形显示,而无法准确识别编码标志和定向靶,致使像片无法定向。
当近距离拍摄时,可使用焦距较短的定焦镜头,相机的光圈数值设置在2左右,可通过调节快门速度和闪光灯照度控制曝光强度。随着拍摄距离的增大,数码相机应更换焦距略大些的定焦镜头,如MetroIn_DPM数字近景工业摄影测量系统原配定焦镜头焦距为30 mm,在拍摄距离增大为20 m时,应更换为焦距为50 mm以上的定焦镜头。当拍摄对象在纵深方向变化较大时,光圈数值应适当加大(如5.6以上),并增加闪光灯照度,减小快门速度,使拍摄的景深加大,确保在纵深方向的各目标点成像清晰。表1给出了实验中各拍摄位置最佳曝光强度时的闪光灯照度及快门速度。
2.3. 摄影测量结果的对比及精度分析
拍摄时在平行于墙体的水平方向设置3个拍摄位置,在每个水平位置借助升降梯在竖直方向设置3个拍摄位置进行拍摄。为确保像片的重合度,在每个拍摄位置均按上、下、左、右、中五个方向进行拍摄。采用MetroIn_DPM软件对拍摄的像片进行处理解算,获得各目标点在各自坐标系下的三维坐标及精度。表2给出了不同拍摄距离部分目标点解算结果及精度,在拍摄距离为4~5 m时,目标点的平均点位误差为0.061 mm,最大点位误差为0.077 mm。在拍摄距离为10~12 m时,目标点的平均点位误差为0.081 mm,最大点位误差为0.119 mm。
利用公共点将拍摄距离为10~12 m时解算的测量点坐标转换到拍摄距离为4~5 m时解算的测量坐标系下,在同一坐标系下两次测得坐标对比结果见表3。由表3可知,在同一个坐标系下两次解算坐标的最大差值为0.2819 mm,RMS最大值为0.2030 mm。说明MetroIn_DPM摄影测量系统在不同位置拍摄解算结果是比较稳定的。
2.4. MetroIn_DPM系统及Axyz/MTM系统测量结果的对比
由于首次将MetroIn_DPM工业摄影测量系统应用于拍摄距离较远的测量对象,因此需要在实验室内进行多项实验来验证其应用于该工程项目的可行性。Axyz/MTM工业测量系统点位测量精度可达1‰∙mm,并且其测量的稳定性较好,已广泛应用于多种工程项目 [9] [10] [11] 。因此使用Axyz/MTM经纬仪工业测量系统分两次对各目标点进行了测量,并通过坐标转换与MetroIn_DPM系统测量结果进行了对比。

Table 1. The best exposure conditions and the gray values obtained in different locations
表1. 不同位置拍摄最佳曝光条件及获取的灰度值
Table 2. Results of partial solutions taken in different locations
表2. 不同位置拍摄的部分解算结果
表4为Axyz/MTM经纬仪工业测量系统两次的测量结果。目标点的平均点位误差为0.0301 mm,最大点位误差为0.0471 mm。
将经纬仪测量系统两次测得的测量点坐标通过公共点转换后得到两组观测数据的差值见表5。
表4和表5表明经纬仪测量系统测量的点位误差均小于0.05 mm,两次测量的各坐标差值基本小于0.1 mm,两次测量结果的差值的RMS为0.0448 mm。说明经纬仪测量系统测量稳定性是比较高的。
用Axyz软件的坐标转换模块将摄影测量系统测得的点坐标转换到经纬仪测量系统坐标下,转换后坐标的差值见表6。表中数据表明两套测量系统转换到同一坐标系下的坐标差值的RMS平均值为0.1662 mm,RMS最大值为0.3558 mm。通过上述检验表明,MetroIn_DPM系统在较远距离拍摄的精度完全可以满足建构筑物监测工程的精度要求。
3. MetroIn_DPM系统在加油站罩棚形变监测中的应用研究
在我矿三采区中部建有一加油站,该站的罩棚为平板网架结构、独立悬臂柱支承。四根支柱为钢筋
Table 3. Comparison of partial solutions of common point conversion values
表3. 公共点转换值部分解算结果的对比
混凝土结构,支柱间距为14 m,罩棚边沿超出支柱为5 m,棚高为8 m。该建筑物抗变形能力较差,当地表倾斜量较大时极易造成罩棚整体失稳倒塌,而曲率及水平变形会造成罩棚的四角锥网架的受力变化以及输油管道的断裂。在加油站西侧、南侧及下部布设有多个全采工作面及宽条带工作面,根据地表变形预计,加油站处地表最大倾斜达到8 mm/m,最大水平变形达到6 mm/m。为确保加油站安全,在采动前对加油站罩棚进行了加固,将四根支柱改为可调整高度的钢架结构,当罩棚倾斜时通过调整支柱高度进行纠偏。为及时掌握罩棚的倾斜状况,需对其进行形变测量。加油站罩棚形变测量采用MetroIn_DPM系统实施。
3.1. 监测点的布设
将编码标志和圆形测量标志布设在加油站罩棚及支柱表面,分别在各支柱相互垂直的两个侧立面及罩棚的顶部上下边缘粘贴反光标志点作为测量点。测量点布设示意图见图3。该标志可同时作为经纬仪测量系统和数字工业摄影测量系统的观测目标。布设时,编码标志和圆形测量标志交替粘贴。加油站
Table 4. Measurement results and accuracy of Axyz/MTM theodolite industrial measurement system
表4. Axyz/MTM经纬仪工业测量系统测量结果及精度
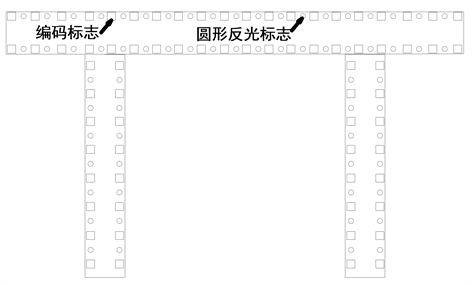
Figure 3. Layout of the measuring points of the gas station tent
图3. 加油站罩棚测量点布设示意图
Table 5. Difference and precision of common points after conversion
表5. 转换后公共点差值及精度
罩棚各面共布设134个点状编码标志,76个圆形测量点标志。
3.2. MetroIn_DPM数字工业摄影测量系统监测方案实施
由于加油站罩棚边缘距离支柱5 m,加油站罩棚8 m高。为了同时拍到支柱及罩棚顶部的标志点,拍摄位置必须距离定向靶20 m左右。通过实验筛选将相机光圈调到5.6,相机快门速度定为1/400,闪光
Table 6. Difference between Axyz/MTM system and MetroIn_DPM system coordinates after conversion
表6. 转换后Axyz/MTM系统与MetroIn_DPM系统坐标的差值

Figure 4. The stereo map of the gas station tent
图4. 加油站罩棚测量点立体图
灯曝光强度为1/4。拍摄时间选择在夜晚进行。
由于加油站体积较大,需要安置三次定向靶,分三个面进行拍摄,各面应尽量对转角处测量点进行拍摄测量,作为后期坐标转换的公共点。拍摄时每个面水平方向设12个摄站,垂直方向借助10 m人字形竖梯设3个摄站,共分36个摄站进行拍摄。为确保各拍摄面的三维坐标转换精度,在场地内部安置了多个公共点,点上设置了反光球作为目标点。使用MetroIn_DPM软件对拍摄的像片进行扫描、定向、匹配,导入基准尺后并对其进行平差解算,得出测量点的三维坐标。
3.3. 加油站形变趋势
将测得的所有点的三维坐标导入Matlab软件后得到罩棚各点位立体图(图4)。
因为主要检测罩棚顶部的倾斜,因此只需分析其Z轴坐标。图5为罩棚北面上边缘和下边缘编码标志点及测量点的折线图。
检测结果表明北面罩棚上下边缘测量点高程从东到西逐渐降低,东西两侧高程相差56.248 mm。南面罩棚上下边缘测量点高程也是从东到西逐渐降低,东西高程相差45.269 mm。东面罩棚上下边缘测量点高程从南到北逐渐降低,南北两端高差为37.762 mm。西面罩棚上下边缘测量点高程也是从南到北逐渐降低,南北两端高差为68.947 mm,顶棚出现弯曲。由此可见,加油站的整体是往西北方向倾斜,东南方向较高,西北方向较低。东南角比西北角高102.074 mm。根据东南角与西北角的三维坐标计算出两点间的距离为42992.399 mm,由此得出加油站罩棚的倾斜为2.4 mm/m。

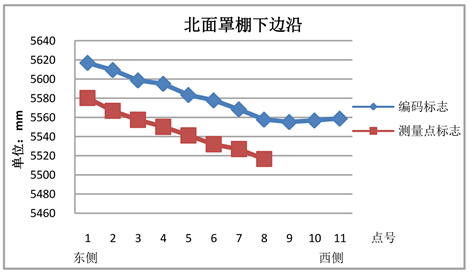
Figure 5. Line chart of the upper edge and lower edge of the tent
图5. 罩棚北面上边缘及下边缘测量点折线图
对于加油站支柱的倾斜情况,只需要分析在各面设站测得的测量点X轴坐标即可。通过分析加油站支柱上测量点X轴坐标,发现各支柱均向西北方向倾斜。其中东南支柱倾斜最大,向北倾斜5.698 mm/m,向西倾斜2.788 mm/m。
4. 结论
通过实验室的对比分析及实际工程的应用实践表明,MetroIn_DPM数字工业摄影测量系统在实验室内当拍摄距离为4~5 m时,目标点的平均点位误差为0.061 mm。在拍摄距离为10~12 m时,目标点的平均点位误差为0.081 mm。与Axyz/MTM工业测量系统测量结果对比其坐标差值的RMS平均值为0.1662 mm。在野外拍摄距离为20 m时,其点位测量精度可控制在1 mm左右。由此得出MetroIn_DPM数字工业摄影测量系统在较远距离拍摄的精度可以满足一般建构筑物监测工程的精度要求。
文章引用
李永超,车 亮,李建军,佟文亮. MetroIn_DPM系统在大型建构筑物形变监测中的应用研究
The Application of MetroIn_DPM System in the Deformation Monitoring of Large Structures[J]. 测绘科学技术, 2018, 06(02): 41-51. http://dx.doi.org/10.12677/GST.2017.62006
参考文献 (References)
- 1. 冯其强. 数字工业摄影测量中的标志点匹配和自检校光束法平差快速解算[D]: [硕士学位论文]. 郑州: 解放军信息工程大学, 2007.
- 2. 冯文灏. 关于发展我国高精度工业摄影测量的几个问题[J]. 测绘学报, 1994, 23(2): 120-126.
- 3. 黄桂平. 数字近景摄影测量关键技术研究与应用[D]: [博士学位论文]. 天津: 天津大学, 2005.
- 4. 冯文灏. 近景摄影测量[M]. 武汉: 武汉大学出版社, 2001.
- 5. 陈新, 冯其强, 李宗春. 摄影测量系统精度测试新方法[J]. 测绘工程, 2010, 9(2): 58-60+63.
- 6. 冯其强. 数字工业摄影测量技术研究与实践[D]: [博士学位论文]. 郑州: 解放军信息工程大学, 2010.
- 7. 李广云, 李宗春. 工业测量系统原理与应用[M]. 北京: 测绘出版社, 2010.
- 8. 冯文灏. V-STARS型工业摄影测量系统介绍[J]. 测绘信息与工程, 2000(4): 42-47.
- 9. 焦明东, 郑文华, 刘尚国, 程小龙. Axyz/MTM测量系统在开采沉陷实验模型研究中的应用[J]. 矿山测量, 2009(3): 34-35.
- 10. 刘尚国, 郑文华, 孙佳龙, 徐文锦. 关于Axyz/MTM工业测量系统在3维测量车传感器位置检测中的应用[J]. 测绘通报, 2006(9): 62-64.
- 11. 郑文华, 石娟, 刘尚国, 景冬, 孙成. Leica Axyz/MTM在矿井提升绞车检测中的应用[J]. 矿山测量, 2008(4): 17-20.