Geomatics Science and Technology
Vol.
11
No.
04
(
2023
), Article ID:
73038
,
7
pages
10.12677/GST.2023.114037
无人船与机载雷达技术在水下地形测绘中应用
孙海广
佛山市平面测绘科技有限公司,广东 佛山
收稿日期:2023年7月5日;录用日期:2023年9月18日;发布日期:2023年9月25日

摘要
针对地上河流的水资源对经济发展所起的作用日益增加,对河流水资源的开发、治理等工作变得尤为重要。随着科学技术的发展,单波束技术、多波束技术,激光雷达技术的融合实现了水下地形测绘任务。依托河流某一项目,证明了这几种技术在获取水下地形数据方面的可行性,并依托该项目系统地介绍了水下测绘的完整流程。并为大规模开展类似项目提供参考依据。
关键词
单波束技术,多波束技术,激光雷达,主测线

Application of Unmanned Ship and Airborne Radar Technology in Underwater Topographic Mapping
Haiguang Sun
Foshan Plane Surveying and Mapping Technology Co., Ltd., Foshan Guangdong
Received: Jul. 5th, 2023; accepted: Sep. 18th, 2023; published: Sep. 25th, 2023

ABSTRACT
In view of the increasing role of water resources in the Yangtze River Basin in economic development, the development and management of water resources in the Yangtze River has become particularly important. With the development of science and technology, the integration of single beam technology, multi beam technology and lidar technology has realized the task of underwater topographic mapping. Relying on a project in the Yangtze River Basin, this paper proves the feasibility of these technologies in obtaining underwater topographic data, and systematically introduces the complete process of underwater surveying and mapping based on the project, and provides reference basis for large-scale similar projects.
Keywords:Single Beam Technology, Multi Beam Technology, Lidar, Main Survey Line

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
关于河流地区的地质与地形情况的掌握,对于规划航道与周边城市建设都有着非常积极的作用。某流域中包含着主要为水体、滩涂、江岸等地理要素信息,及时通过技术手段获取地理信息数据是摆在测量人面前的一道难题。受制于技术发展的瓶颈,水下地形测量技术相比于陆地测量技术发展较慢,存在着较大的技术差距。陆地测量早已形成完整的技术规范,测量技术方法多样,数据成果种类繁多。而水下测量仍处于摸索前进阶段。目前常用的水下测量技术方法为单波束技术与多波束技术测量,这都属于回声探测技术的衍生品。文献 [1] 中介绍智能无人船搭载单波束测深系统在水库地形测量中应用,系统性完整地介绍了操作流程。文献 [2] 中介绍了多波束系统在港口巷道测量中的应用,以工程实例为依托详细介绍操作流程,最后得到了精度较优的水下地形图。文献 [3] 中通过合理规划测线,经过声速改正、吃水改正,利用船载GNSS导航定位和测深仪采集测深数据,经转化处理后快速生成水下地形测量成果。以上均是成熟的无人船技术搭载单波束与多波束系统实现水下测量地形图。
本文结合某流域某一水下地形测量项目为例,将本项目空间上分为三个部分。其中,水下地形数据获取采用单波束系统与多波束系统相结合的方式;滩涂、江心洲地形地貌数据获取通过无人机搭载激光雷达实现;陆地地形数据的获取通过无人机搭载倾斜相机获取测区的三维模型,并结合收集到的1:500、1:1000地形图进行修编。综合以上三种技术方法获取到全要素的河流流域某一区段的数据,实现了该区段的地理信息数据高效率采集。
2. 研究区概况
河流全长约216 km,流经我市7个县市区,具有行洪、供水、航运、渔业、生态、景观等综合功能。由于河流南通段属于入海口感潮段,流域内汇集了巨大的水量和沙量,在水流和泥沙运动规律的作用下,沿线孕育多种形态各异的地形地貌。党的十八大以来,习近平总书记多次强调湿地的重要性,对河流湿地的环境保护和生态修复一直牵挂于心。为准确了解河流南通段内水域的水深情况,积极落实《河流保护法》和《湿地保护管理条例》,完善河流南通段水域内江心洲(滩)、暗礁等信息,丰富南通市基础测绘成果,实施了河流南通段水下地形图测制项目。
3. 关键技术研究
3.1. 单波束测深
单波束系统测量工作中主要运用换能器垂直向下发生短脉冲声波,在作业过程中,脉冲声波触到水底时出现反射,反射回波返回声呐,并被换能器接收。单波束测深系统难以准确记录测线间点数据,主要是按照航线,以一定的时间或距离进行数据测量。单波束测量作业进行中主要是沿着河道横断面进行布设 [4] 。
1) 测深线布设
参照已有资料,主测深线方向与等深线方向垂直,同时各测线间保持平行,根据《工程测量规范》中1:2000比例尺要求,本次测量测深线间距设定为40 m,部分水域呈扇形布设;测线采集点距设定为20 m。本次单波束测量共布设测线4275条,测量面积达455.11 km2,典型测区测线布设见图1,图2。

Figure 1. Layout of sounding lines
图1. 测深线布设

Figure 2. Layout of sounding lines
图2. 测深线布设
2) 测量作业
① 单波束水下地形测量采用RTK测量系统和HY1601测深系统的组合。在海洋测绘专业软件Haida6.0的导航下,实现平面位置数据与水深数据的同步采集,并按软件定义的文件格式将平面位置数据和水深数据合并形成外业数据文件,数据采集按20 m等距方式采集,坡度较陡水域适当加密。
② 每天作业前,检查测量船的水舱和油舱的平衡情况,保持船舶的前后及左右舷的吃水一致;水温、盐度、深度都对声速产生影响,声速直接影响水深的精度,声速改正非常必要。测深之前,利用声速剖面仪器测定声速,取平均声速为初始声速,用于声速改正。
③ 采集数据过程中,作业船只按预定的航速和航向稳定航行,航行速度保持在6~7节。
④ 测量过程中,测量人员实时监测测深设备的运行状态。
⑤ 每天工作结束后,技术人员备份全部原始数据,并对获取的原始数据和资料进行全面检查。
3.2. 多波束测深
多波束测深系统是一套用于水下地形数据获取的多传感器组合而成的设备,其利用安装在水下的换能器发射扇形波束,并接收水底反射回波信号,根据记录声波在水下的传播时间来量测水深。多波束条带测深系统采用发射、接收基阵互相垂直的方式。发射基阵平行于船屉首尾连线安装,而接收基阵垂直于船体首尾连线安装。发射信号和接受信号分别在某一方向上形成较小的波束角,而在垂直的另一方向上形成较宽的方向角,其形成的组合区域即是测量区域,目的是使船体的运动姿态对测量系统的影响降到最低。多波束测深系统具体测量过程为:换能器阵发射形成的扇形声波波束,照射测量船正下方的一条狭窄水域,同时启动计数器;声波在水中传播,接触到该水域底部时发生反射,因各反射点的空间位置不同,回波返回的时间也不相同;到达换能器的回波中包含了水下地形起伏等信息,对回波信号进行固定方向的多波束形成、幅度检测、能量累积等处理,当检测到相应角度的回波信号时,记录其计数值,直至所有待测角度的回波都到达完毕,即完成了一次测量。此时根据对应角度的计数值和测量时的声速值,可以反算每个反射点距离换能器的深度,再经过简单的三角变换,即可同时测出多点的深度信息。测量船沿着航道方向运动并连续测量,便可完成对船两侧条带水域水下地形的测量 [5] 。
根据我院以往经验,大比例尺水下地形测量时−10 m等深线以下的水域使用单波束测深效率较低,为保证本项目的生产效率,结合测区水域条件和已有的水下地形数据,对通州区、市本级部分水域采用多波束进行水深测量。
1) 多波束测深线的布设
主测深线方向与水流方向平行,各测线相互平行;结合多波束实际扫宽能力,布设测线间隔为40米,现场测量时根据水深情况略有调整。共布设多波束测深线78条。
2) 测量作业
多波束水下地形测量采用RTK测量系统和T50测深系统的组合,实现平面位置数据与水深数据的同步采集,并按软件定义的文件格式将平面位置数据和水深数据合并形成外业数据文件。
测量过程中,作业人员实时监控多波束测深系统各传感器工作状态,确保工作顺利进行,填写现场记录表,根据多波束测量系统质量监控功能实时监控测量质量。多波束测深作业时,测量船按计划线顺着水流方向进行作业,在作业时通过高频与周边船只沟通,及时避让。
每天测量结束后,对当天测量数据进行数据汇总,并检查数据质量情况,保证测量成果准确,可靠。本次多波束测量完成的面积约为64.33 km2,共完成78条测线,测点累计达160,912个。
3.3. 单波束测深系统与多波束测深系统具体分析
单波束测深系统在测量过程中优势明显,设备构成较简单,便于随时携带,且安装过程方便。在实际作业过程中,要求对定位以及吃水位进行重新确定与改正,经过处理,软件界面操作正常,可采用多种成果输出方式。但是单波束运用存在一定的局限性,难以准确测量相邻两点之间的微地形,在精度要求较高时难以得到准确数据。在计算机软件自动生成图形的过程中可能产生不够真实的地形图,尤其对测区边界河口处等高线的测量表现明显,测量数据可能出现扭曲变形现象。测量操作中可采用加密测线的处理方式,提升水下测量区域的精度,但是运行中需投入较多的时间成本与人力成本。多波束测深系统测量情况:多波束测深系统测量过程中具有复杂的外业作业处理方式及整体安装过程,测量过程中要求连接多项设备,并严格运用多种有效的连接方式,在连接作业完成后,对相关数据进行对比,严格参照JT/T790-2010《多波束测深系统测量技术要求》中的相关规定,测深开始前,需进行必要的前提准备,如,横摇改正、艏向改正、时延改正、纵摇改正等。在实际测量工作中,要求结合实际测量工作需要,不断调整相关参数,进而得到最佳测量效果。此种测量方式运用中,外业测量工作效率较高,能实现测量工作的全覆盖与全面测量,基本不会遗漏地形信息。结合多波束测深系统原理,测量作业进行中应结合实际情况及作业管理规范,制定作业流程图,要求边沿波束重叠度符合相关作业标准,两条计划测线边沿波束达到高于20%的重叠度。与单波束测深系统相比对,多波束测深系统测量中处理数据较多,整体数据处理较复杂,要求精心选择合适的数据完成作图,操作要求较高。
3.4. 机载激光雷达施测
受潮汐、船只吃水深度等因素影响,本次浅滩、江心沙洲等受潮位影响较大区域在最低潮水域部分采用机载激光雷达航测作业,获取测区内的激光点云数据、采集结束后结合POS信息,地面GNSS基站信息进行数据的解算,解算完成后利用专业软件进行数据分类、地面高程提取等。
测量时基站架设于开阔地,飞机置于距离基站十米以外位置,接通电源后检查无人机及激光雷达指示灯是否正常,使用遥控器解锁无人机,并使无人机缓慢离地面执行任务。航测每次采集数据前均采用绕“8”字进行校准,校准完成后根据设计航线自动飞行至返航,完成当架次飞行任务。具体流程见图3。
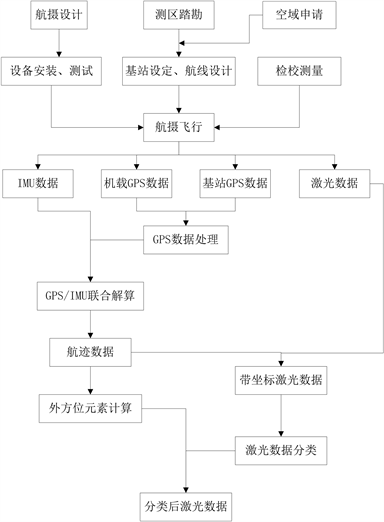
Figure 3. Airborne lidar data acquisition process
图3. 机载激光雷达数据获取流程
4. 数据处理及研究成果
1) 单波束数据整理
单个工作日外业测量结束后,根据连续测量数据进行测深数据滤波,剔除掉伪水深值。对于水深曲线不符合变化规律部分,查找原因,无法修正的制定补测线,第二个工作日开始前进行补测、更新,以确保数据的准确性。
2) 多波束数据整理
单个工作日外业测量结束后,使用PDS2000专用软件包对多波束数据进行汇总处理,实现数据的清理、剔除错误,并根据给定参数进行原始数据的改正,然后对数据进行计算、描述和制图。经过各项改正后的水深数据,通过该软件包生成水深数据图,并根据测图比例,生成格网水深数据文件;再通过Autodesk AutoCAD进行图形的绘制与处理,处理效果如图4所示。

Figure 4. Multi beam point cloud image
图4. 多波束点云图
3) 滩涂、江心洲数据整理
机载激光雷达外业数据利用gAirHawk软件进行点云计算,应用TerraSolid软件进行高程精度评定、异常点剔除和提取。提取的点云密度根据1:2000成图技术要求设定为20 m。获取的部分激光雷达数据如图5所示。

Figure 5. Lidar point cloud map
图5. 激光雷达点云图
4) 接边处理
为保证本次测量区域数据的完整性,特别是潮间带受潮水、船只吃水深度影响,在最高潮时利用船只进行数据采集,最低潮时利用无人机激光雷达系统进行数据采集,保证了水下地形和浅滩之间潮间带的100%覆盖,重叠区域在进行精度评估后统一采用精度较高的无人机激光雷发数据最为最终成果提交。
5) 质量检查
水下地形测量质量检查主要包括对主测线、检测线的布设情况进行检查以及对水下高程点高程值精度进行检查。河流流域南通段水下地形测量项目实测主测线4275条,实测检查线,检查线总长占主测线总长的6.0%,满足规范要求。在平坦地区取实地0.5 m以内的2个水下高程点做比较,在深度变化剧烈或没有重合点的地方,参考其变化规律,从原始数据中提取加密点,加以分析。
5. 结束语
本文结合河流流域水下地形测绘项目,研究了基于单波束技术、多波束技术、激光雷达技术多种技术融合方法在水下测量中的应用。通过内页数据处理,获取到精度满足要求的地形图。并将多种技术获取的地形图通过内页处理为整体。本文系统地介绍了各种技术操作流程,为后续承接类似项目做铺垫。
文章引用
孙海广. 无人船与机载雷达技术在水下地形测绘中应用
Application of Unmanned Ship and Airborne Radar Technology in Underwater Topographic Mapping[J]. 测绘科学技术, 2023, 11(04): 327-333. https://doi.org/10.12677/GST.2023.114037
参考文献
- 1. 肖杰. 智能无人船单波束测深系统在水下地形测量中的应用[J]. 测绘工程, 2023, 32(1): 63-70.
- 2. 张楚琦. 基于多波束测深系统的海南港北港水深测量应用[J]. 鄂州大学学报, 2022, 29(5): 103-105.
- 3. 商建伟. 基于GNSS的单波束测深系统在大中型水库水下地形测量中的应用[J]. 山东国土资源, 2022, 38(1): 65-69.
- 4. 刘一军. 单波束与多波束测深系统在浅水区水下地形测量中的应用研究[J]. 经纬天地, 2021(3): 4-6.
- 5. 付洪波, 曹景庆. 复杂水域条件下单波束无人船地形测量应用[J]. 测绘与空间地理信息, 2021, 44(S1): 219-221.