Journal of Aerospace Science and Technology
Vol.03 No.02(2015), Article ID:15438,5
pages
10.12677/JAST.2015.32002
Study on Trajectory Algorithm of Motion Platform
Hongli He
Chinese Flight Test Establishment, Xi’an Shaanxi
Email: 343137051@qq.com
Received: May 29th, 2015; accepted: Jun. 15th, 2015; published: Jun. 18th, 2015
Copyright © 2015 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
The tracked plane target is tested by a variety of devices in whole flight test. The plane trajectory signals which are received through moving base radar, moving base photo-electric theodolite and wireless communication device, are discontinuous and contaminated. The discontinuous data and outlines are caused by the devices coverage, communication bandwidth limitation as well as signal blockage. In order to get the whole trajectory, a sort of common track synthesis algorithm is designed according to the characteristics of the device, the moving platform position and attitude. The steady continuous trajectory can be get, and the trajectory data are satisfied for the need of flight control and test.
Keywords:Flight Test, Moving Base, Trajectory, Exception Information
运动平台轨迹计算方法研究
何红丽
中国飞行试验研究院,陕西 西安
Email: 343137051@qq.com
收稿日期:2015年5月29日;录用日期:2015年6月15日;发布日期:2015年6月18日

摘 要
飞行试验过程中,采用多种设备进行被测目标的全程跟踪,由于受设备作用距离,通讯带宽,飞机姿态引起的遮挡等原因,测量雷达、光电经纬仪和无线通讯设备接收到的飞行轨迹信息含有大量异常信息且不连续,为了获得目标完整的可靠的全局轨迹,根据各设备的特点,结合运动动平台的位置和姿态信息,设计了一种轨迹生成算法,可以稳定、连续的获得跟踪目标全局轨迹,满足飞行测试与指挥的需要。
关键词 :飞行试验,运动平台,航迹,异常信息

1. 引言
飞行试验是飞行器研制过程中的重要环节,飞行试验过程中采集记录的飞行器状态轨迹是评估飞行器性能指标的重要参考依据[1] [2] ,飞机在海上进行试验时,由于受复杂的电磁环境,设备作用距离,通讯带宽,信号遮挡等原因,各运动平台测量系统接收到的局部航迹信息往往含有大量噪声且常不连续;同时由于光电经纬仪、雷达、GPS等测量的范围与测量重点不同,测量区域不同,所以他们获取的信息段不完全一致,如何根据各设备的局部测量信息,快速解算出飞机稳定、可靠、连续的全局轨迹,满足飞行指挥员和测试工程师飞行指挥、监控与引导是本文需要解决的问题。
本文根据飞行试验需求,通过研究给出一套轨迹数据处理的具体方案,设计给出轨迹成算法的基本框架,然后根据轨迹测量系统的配置情况给出轨迹解算通用算法。
2. 航迹合成算法框架[3] -[5]
航迹合成算法主要由3个模块组成:跟踪滤波模块、外推模块及点迹合成模块,如图1所示。跟踪滤波是根据一组观测值估计目标状态值的过程,其主要任务是通过跟踪滤波算法,更加准确地估计和预测目标的状态;外推模块是航迹合成算法必不可少的一个模块,包括无点迹时用友邻传感器观测值更新航迹及接力跟踪两部分;点迹合成是把不同采样率的传感器获得的数据进行融合处理获得最终信息的过程。
3. 运动平台航迹合成算法
运动平台航迹测量系统由不同性能,不同采样率、不同作用距离的各系统组成,包括光电经纬仪、雷达系统和机载无线下发GPS等和运动平台上安装的GPS基准站及惯导系统组成。飞机海上飞行试验时,除机载GPS外其它航迹测量系统都安装在运动平台上。本课题就是利用多轨迹测量设备结合组合惯导设备获取的运动平台的位置、姿态等信息,通过融合计算获得目标在运动平台坐标系下的全局航迹,获得运动平台航迹关键解决好各测量系统测量目标滤波,空间配准和点迹合成算法。
3.1. 跟踪滤波
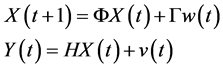
跟踪滤波采用以Kalman跟踪理论为核心的目标跟踪理论和方法,通过各系统的观测值估计目标在各局部坐标系的运动状态,Kalman滤波估计的状态变量为:
 (1)
(1)
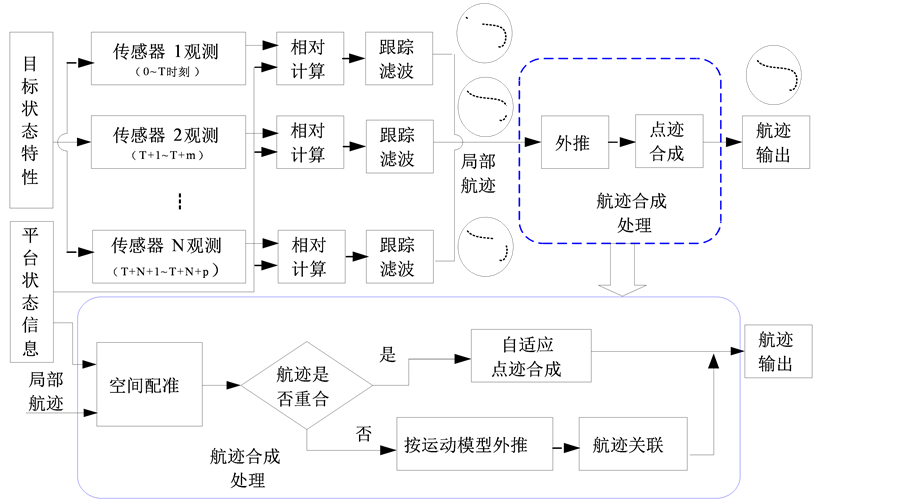
Figure 1. Basic framework of composite tracking algorithm
图1. 航迹合成算法基本框架
其中,x、y、z分别为航迹相对于参考原点坐标系的坐标,后面分别为其速度和加速度值。状态空间模型的线性化形式为:
 (2)
(2)
其中t为离散时间,状态向量 ,观测向量
,观测向量 ,
, 和
和 是零均值的白噪声。
是零均值的白噪声。 叫输入噪声,
叫输入噪声, 叫观测噪声,
叫观测噪声, 阵
阵 叫状态转移阵,
叫状态转移阵, 阵
阵 叫观测阵,
叫观测阵, 为
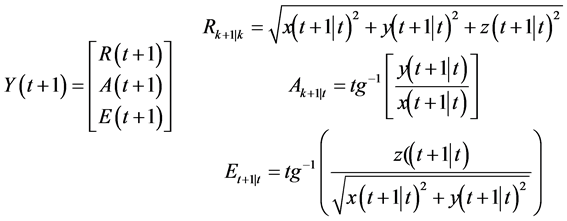
为 输入噪声转移阵。在航迹处理时,对线性量测数据或目标GPS通过相对计算转化为直角坐标系数据进行滤波处理时采用常规的Kalman滤波算法。但当对光电经纬仪和雷达的量测数据进行滤波处理时,观测量与系统状态成非线性关系,与常规Kalman滤波算法不同之处在于其量测方程,根据光电经纬仪、雷达等的测量原理,对于一个运动体的测量应该包括如下的三个量:R,测站到被测目标的径向距离;A,测站到被测目标的方位角;E,测站到被测目标的仰角。则对于运动体的三维空间状态,此时有如下的数学关系:
输入噪声转移阵。在航迹处理时,对线性量测数据或目标GPS通过相对计算转化为直角坐标系数据进行滤波处理时采用常规的Kalman滤波算法。但当对光电经纬仪和雷达的量测数据进行滤波处理时,观测量与系统状态成非线性关系,与常规Kalman滤波算法不同之处在于其量测方程,根据光电经纬仪、雷达等的测量原理,对于一个运动体的测量应该包括如下的三个量:R,测站到被测目标的径向距离;A,测站到被测目标的方位角;E,测站到被测目标的仰角。则对于运动体的三维空间状态,此时有如下的数学关系:
 (3)
(3)
其中, 是t + 1时刻的量测向量,x,y,z为空间的三个方向。
是t + 1时刻的量测向量,x,y,z为空间的三个方向。
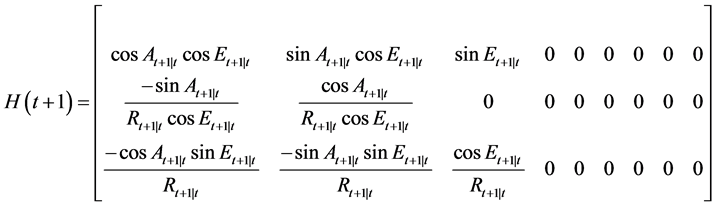
由于(3)式的非线性特性,在将其转换为卡尔曼滤波器可以直接应用的状态空间结构的时候,应对量测方程进行泰勒展开。此时,可得到如下的量测矩阵:
 (4)
(4)
在量测模型与状态方程构建好之后,代入kalaman中进行估计与预测。
Kalman滤波的算法步骤如下:
航迹初始化:其中 为9阶单位矩阵
为9阶单位矩阵
 (5)
(5)
状态一步预测:
 (6)
(6)
一步预测均方差:
 (7)
(7)
滤波增益:
 (8)
(8)
状态估计均方差:
 (9)
(9)
状态估计:
 (10)
(10)
当量测数据有异常时,利用预测值代替异常值输出。
3.2. 基于合作目标的运动平台空间配准
非稳定坐标系随着传感器姿态角(y偏航角,ρ纵摇角,ϒ横摇角)的变换而变换,稳定坐标系仅由目标的运动状态决定惯性坐标系,稳定坐标系不受传感器或平台影响。如何对两种数据进行坐标统一,是动平台空间配准的一项关键技术,通过研究给出了球坐标系下非稳定测量向稳定测量空间对准的转换方法。
设 和
和 分别为某点在传感器稳定和不稳定平台坐标(距离,方位,仰角),球坐标系下的稳定转换空间对准的变换如下:
分别为某点在传感器稳定和不稳定平台坐标(距离,方位,仰角),球坐标系下的稳定转换空间对准的变换如下:
 (11)
(11)
其中:

距离R是稳定变化的不变量;方位A和仰角E的稳定过程不需要距离,仅需要不稳定平台测量获取的仰角 和
和 以及平台变化的三姿态角y偏航角,ρ纵摇角,ϒ横摇角。
以及平台变化的三姿态角y偏航角,ρ纵摇角,ϒ横摇角。
3.3. 机动目标多假设航迹合成算法
航迹合成处理采用机动目标多假设航迹合成算法,与传统的航迹融合算法相比,具有航迹合成准则、多假设航迹外推以及航迹拟合3个关键环节,见图2。
1) 航迹合成准则
在航迹合成准则中除了传统的位置关联外,增加了时间关联和航向关联,实际上从目标的的时域特征和目标的运动属性考虑目标的航迹合成,航迹合成准则解决航迹的对接问题。
2) 多假设航迹外推
是基于机动目标多假设跟踪思想提出的,采用多模型算法获取航迹的外推值,然后进行轨迹的合成。
3) 航迹拟合
当两台或多台设备测量的多条航迹对接后,对航迹不连续的部分(如图2中三个关联条件不满足时,无合成航迹输出)可以采用最小二乘拟合法对原有的航迹进行处理,来输出当前的航迹。
4. 试验结果
图3是飞行试验时利用记录的GPS、雷达和光电经纬仪的数据进行航迹合成的处理结果:中远距采用雷达和GPS 接力或两者合成的航迹输出,中近距采用GPS与光电经纬仪的合成航迹,从记录的数据分析,GPS全程较连续,因此合成处理结果与GPS输出的航迹进行比较,从图上可以看出航迹合成结果一致性良好,同时也验证了该合成算法的正确性。

Figure 2. Multiple hypothesis tracking synthetic standards framework
图2. 多假设航迹合成准则框架
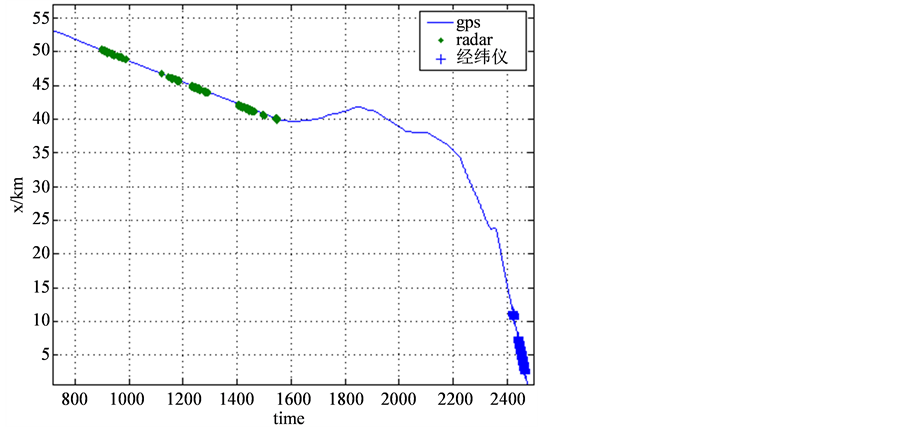
Figure 3. The synthesis result of multi measurement information
图3. 多测量信息合成结果
5. 结束语
航迹合成是飞行试验轨迹测试与监控的重要环节。飞行试验一般采用安装在不同位置具有不同性能的多台(套)设备接力测量,利用冗余互补方式对目标进行测试与监控,通过航迹合成算法最终获取稳定、连续的全局航迹,轨迹合成算法;利用满足了复杂环境飞行指挥和飞行监控的需要,该方法已经应用与飞行测量监控过程中。
文章引用
何红丽, (2015) 运动平台轨迹计算方法研究
Study on Trajectory Algorithm of Motion Platform. 国际航空航天科学,02,13-18. doi: 10.12677/JAST.2015.32002
参考文献 (References)