Journal of Aerospace Science and Technology
Vol.04 No.02(2016), Article ID:17545,7
pages
10.12677/JAST.2016.42002
Modeling and Analysis of Aero-Model Tandem Helicopter
Quanbing Sun
College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing Jiangsu

Received: Apr. 22nd, 2016; accepted: May 10th, 2016; published: May 13th, 2016
Copyright © 2016 by author and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Based on the difference between tandem helicopters and single rotor helicopters, the tandem helicopter was modeled as three rigid bodies: fuselage and two tail rotors. The dynamical model was deduced by Kane method. The mathematical model was simplified to develop simpler translational and rotational equations. The model was simulated in the environment of MATLAB/Simulink. It would provide the basis for the control system of the unmanned tandem helicopter.
Keywords:Tandem Helicopter, Dynamics Modeling, Kane Method, Simulation

纵列式航模直升机建模与分析
孙全兵
南京航空航天大学航空宇航学院,江苏 南京

收稿日期:2016年4月22日;录用日期:2016年5月10日;发布日期:2016年5月13日

摘 要
根据纵列式双旋翼直升机具有的不同于单旋翼带尾桨直升机的特点,提出建立纵列式直升机数学模型的方法。将纵列式双旋翼直升机看作3个刚体(机体和前后两副旋翼),利用分析力学的Kane方法建立直升机的动力学模型,并对模型进行分析。在适当的条件下将数学模型进行简化,导出简化的平移方程和转动方程,在MATLAB/Simulink界面进行仿真,对仿真结果进行分析,为控制器的设计提供依据。
关键词 :纵列式直升机,动力学建模,Kane方法,仿真

1. 引言
直升机可以悬停、垂直起降,具有其他飞行器所不具备的优点,在抢险救灾,物资运输,打击犯罪等场合有着广泛的应用。直升机按照布局可以分为单旋翼带尾桨、共轴双旋翼、纵列式双旋翼、横列式双旋翼等多种形式。本文研究的航模直升机采用的是纵列式双旋翼的布局。
纵列式双旋翼直升机并不常见,在应用中典型的例子是播音公司的CH-47。实际复杂的空气动力使得直升机的运动分析十分困难,本文忽略直升机机身的空气动力,将直升机机身和两副旋翼视为三个刚体,采用Kane方法建立动力学方程 [1] 。将模型简化,在MATLAB/Simulink环境中仿真,对模型的有效性进行验证。
2. 动力学建模
航模直升机只有摆振铰而无挥舞铰,并且桨叶具有更大的刚度,因此桨叶大致在同一平面运动,可将直升机的旋翼简化成一个刚性的绕轴旋转的圆盘。忽略机身的空气动力,将直升机视为三个刚体的系统,其简化的模型如图1所示。
前旋翼、后旋翼、机身的质量分别是 、
、 、
、 ,它们的质心分别是
,它们的质心分别是 、
、 、
、 ,全机的质心是
,全机的质心是 。
。 到
到 在
在 的方向上的距离是
的方向上的距离是 ,
, 方向上的距离是
方向上的距离是 ;
; 到
到 在
在 的方向上的距离是
的方向上的距离是 ,
, 方向上的距离是
方向上的距离是 ;
; 到
到 在
在 的方向上的距离是
的方向上的距离是 ,
, 方向上的距离是
方向上的距离是 。
。 处旋翼产生的在
处旋翼产生的在 、
、 和
和 方向的力矩为
方向的力矩为 、
、 和
和 ,拉力是
,拉力是 、
、 和
和 ;
; 处旋翼产生的在
处旋翼产生的在 、
、 和
和 方向的力矩为
方向的力矩为 、
、 和
和 ,拉力是
,拉力是 、
、 和
和 。
。
直升机的质心 在惯性坐标系中的位置是
在惯性坐标系中的位置是 、
、 、
、 ;
; 、
、 、
、 分别是俯仰、横滚、偏航角;
分别是俯仰、横滚、偏航角; 、
、 、
、 是全机质心在惯性坐标系中的平移速度;
是全机质心在惯性坐标系中的平移速度; 、
、 、
、 分别是直升机绕机体坐标轴
分别是直升机绕机体坐标轴 、
、 、
、 的角速度。根据运动学基本原理可得到直升机的运动方程 [2] 。
的角速度。根据运动学基本原理可得到直升机的运动方程 [2] 。
平移方程:
 ,
, ,
, (1)
(1)
转动方程:
 (2)
(2)
 (3)
(3)
 (4)
(4)
建立动力学模型前对模型进行简化,假定两副主旋翼相对于相应轴的转动惯量 ,
, 。利用Kane方法建模需要设定广义坐标和广义速率。本文选取直升机质心的空间位置
。利用Kane方法建模需要设定广义坐标和广义速率。本文选取直升机质心的空间位置 、
、 、
、 以及三个姿态角
以及三个姿态角 、
、 、
、 为广义坐标,平移速率
为广义坐标,平移速率 、
、 、
、 和转动速率
和转动速率 、
、 、
、 为广义速率,接着求出相应的偏速度和偏角速度。
为广义速率,接着求出相应的偏速度和偏角速度。

Figure 1. Simplified model of aero-model tandem helicopter
图1. 纵列式航模直升机简化模型
 对各个广义速率的偏速度:
对各个广义速率的偏速度:
 ,
, ,
,
 ,
, ,
,
 对各个广义速率的偏速度:
对各个广义速率的偏速度:
 ,
, ,
,
 ,
, ,
,
 对各个广义速率的偏速度:
对各个广义速率的偏速度:
 ,
, ,
,
 ,
, ,
,
机体和两副旋翼对各个广义角速率的偏速度:
 ,
, ,
,
 ,
, ,
,
施加在直升机上的主动力有旋翼的拉力、力矩、直升机重力。广义主动力 (
( )根据下式计算 [3] :
)根据下式计算 [3] :
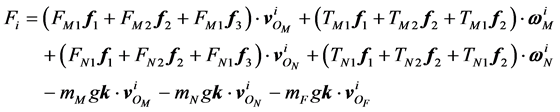
相应的广义主动力:






广义惯性力可以根据下式进行计算 [3] :

两副旋翼相对于各自质心的角加速度分别是 、
、 。相应的广义惯性力为:
。相应的广义惯性力为:
 ,
, ,
, ,
,



由Kane方程 可以得到动力学方程
可以得到动力学方程
平动动力学方程:
 (5)
(5)
 (6)
(6)
 (7)
(7)
转动动力学方程:
 (8)
(8)
 (9)
(9)
 (10)
(10)
式中:







3. 模型分析与仿真
Kane方法建立的动力学方程包括三个平移方程和三个转动方程,引入三个角度关系方程,总共九个方程。自变量为三个角速度 、
、 、
、 ,三个姿态角
,三个姿态角 、
、 、
、 和三个空间位置
和三个空间位置 、
、 、
、 ,总个数也是九个。外力和外力矩仅和输入有关,因而方程封闭。
,总个数也是九个。外力和外力矩仅和输入有关,因而方程封闭。
航模直升机的外力和外力矩依靠周期变矩和电机转速来改变。单个旋翼的周期变矩依靠三个舵机,电机的转速可以用电调调节。因此,外力和外力矩总共12个变量可以通过8个输入来改变。
根据以上分析,建立纵列式直升机模型的仿真控制结构图 [4] ,如图2所示。
根据图2,对航模直升机的起飞阶段进行仿真。航模直升机在悬停或者飞行平稳的状态下(不做高机动动作)绕机体坐标轴 、
、 、
、 的角速度
的角速度 、
、 、
、 较小,忽略二阶小量,直升机旋翼相对中心的转速保持不变,则旋转动力学方程可以线化为:
较小,忽略二阶小量,直升机旋翼相对中心的转速保持不变,则旋转动力学方程可以线化为:
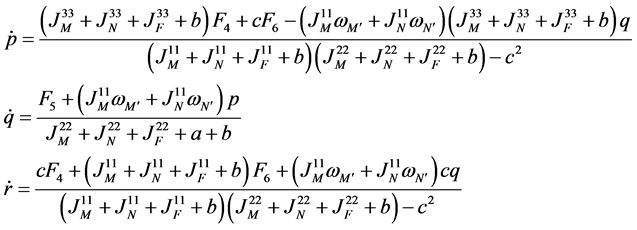 (11)
(11)

Figure 2. Simulation of aero-model tandem helicopter
图2. 纵列式航模直升机仿真
式中:
 ,
, ,
,

将微分方程转化成状态空间方程 [5] :
 (12)
(12)
式中:
 ,
, ,
,
系数矩阵 、
、 可根据方程组(11)得到,
可根据方程组(11)得到, ,
, 。
。
起飞阶段直升机没有高机动动作,利用方程(12),结合平移动力学方程和转动方程,在MATLAB/ Simulink界面对航模的运动进行仿真。旋转动力学方程用状态空间实现,平移动力学方程和角度关系方程用Embedded MATLAB Function实现。为了简化操作,在仿真时把外力和外力矩作为输入量。航模起飞阶段基本处于力矩平衡状态,起飞时间短,可认为输入量保持不变且 方向的外力较小,得到的结果如图3所示。
方向的外力较小,得到的结果如图3所示。
Simulink模拟的是航模在较平稳的飞行状态下的飞行结果,从图中可以看出 和
和 方向的位移较大,
方向的位移较大, 方向的位移较小,且处于波动中。这是因为机身在外力矩作用下出现了一定的横滚和偏航角,使得
方向的位移较小,且处于波动中。这是因为机身在外力矩作用下出现了一定的横滚和偏航角,使得 、
、 方向的力在
方向的力在 方向产生分量,并且由于横滚和偏航角的变化使得
方向产生分量,并且由于横滚和偏航角的变化使得 方向的位移出现波动。仿真的结果基本符合航模直升机起飞的运动趋势。
方向的位移出现波动。仿真的结果基本符合航模直升机起飞的运动趋势。
实际操作中,一般通过人为遥控改变输入量,使得航模能在空中做机动飞行。由于航模的质量一般都较小,易受到外部干扰,这都需要航模驾驶员根据实际情况随机应变。
4. 结语
本文采用了Kane方法建立了纵列式双旋翼航模直升机的数学模型,在建模的过程中考虑了直升机两副旋翼的惯性效应,将航模看作三个刚体,模型的方程组封闭。在此基础上,对模型进行分析,提出模型仿真的方案,并在MATLAB/Simulink界面对航模的起飞阶段进行仿真,仿真结果基本符合航模的起飞
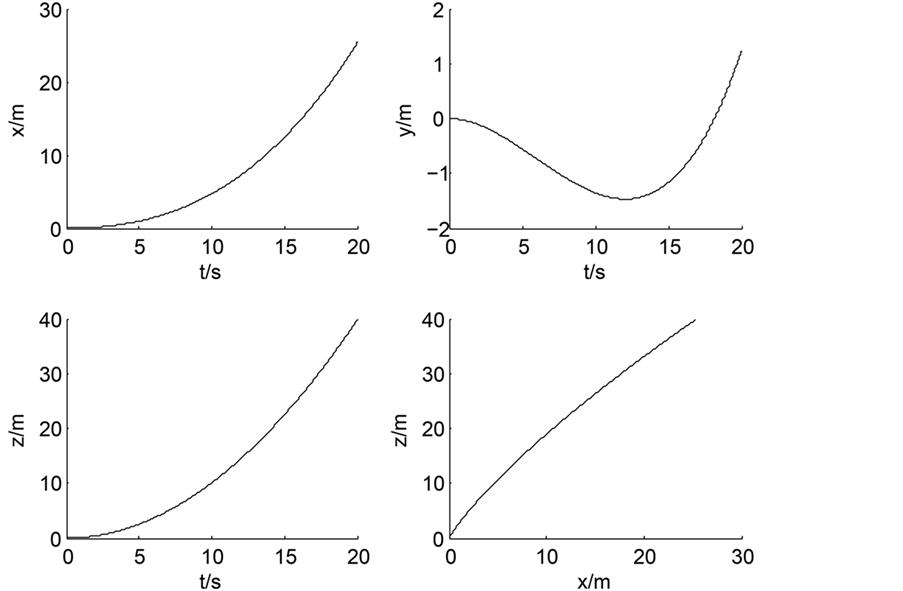
Figure 3. The coordinate of aero-model flight
图3. 航模飞行位置坐标
趋势,验证了模型的有效性。仿真时,假定航模飞行平稳,将模型的旋转动力学方程线化,实际上航模的运动方程是非线性方程,并且轻质量的航模易受到外界条件干扰,这是航模控制器设计时必须考虑的。
基金项目
南京航空航天大学2015年本科生创新训练(项目编号:201510287005X)。
文章引用
孙全兵. 纵列式航模直升机建模与分析
Modeling and Analysis of Aero-Model Tandem Helicopter[J]. 国际航空航天科学, 2016, 04(02): 9-15. http://dx.doi.org/10.12677/JAST.2016.42002
参考文献 (References)