Computer Science and Application
Vol.
08
No.
10
(
2018
), Article ID:
27258
,
8
pages
10.12677/CSA.2018.810171
Design and Research of Quick Detection System for TT & C Equipment Interference Sources
Baoguo Gu, Huazhong Chen, Wentong Xu, Di Wu, Yanfei Guo
Unit 63726 of the PLA, Yinchuan Ningxia

Received: Oct. 7th, 2018; accepted: Oct. 18th, 2018; published: Oct. 25th, 2018

ABSTRACT
The Unmanned Aerial Vehicle (UAV) platform is used as a carrier, equipped with radio detection equipment, which analyzes and processes the interference signal. The direction finding algorithm detects finds and locates the interference source, and takes photos and images of the interference source through the onboard camera. The location information and image information of the interference source are transmitted to the ground terminal, which provides a convenient and efficient technical means for the TT & C equipment to check the interference source, and avoids the adverse effects caused by the ground detection.
Keywords:TT & C, Interference Source, Detection
测控装备干扰源快速侦测系统设计研究
顾保国,陈华中,许文彤,吴迪,郭彦斐
63726部队,宁夏 银川
收稿日期:2018年10月7日;录用日期:2018年10月18日;发布日期:2018年10月25日

摘 要
以无人机平台为载体,搭载无线电探测设备,对干扰信号进行分析处理,通过测向定位算法对干扰源进行侦测、查找、定位,并通过机载摄像头对干扰源进行拍照、摄像,实时将干扰源的位置信息和图像信息传送至地面终端,为测控设备排查干扰源提供便捷高效的技术手段,避免地面侦测带来的不利影响。
关键词 :测控,干扰源,侦测

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着我国无线电通信技术的快速发展,无线电作为一种信息的载体,在国民经济建设中起着越来越重要的作用。由于城市建设的发展,驻城测控站的周边电磁环境日趋复杂,地方频率管理不严格,无线设备使用种类繁多,大量未经审批的无线电发射设备应用在城建、物业、广播电视等领域,对测控设备的使用带来了不利影响,在某次航天发射准备过程中,驻内蒙古某测量站雷达设备受不明干扰信号的影响,导致多普勒测量值浮动,残差出现较多毛刺,单边功率谱谱线幅度整体抬高,测速方差跳大数,出现超差问题。
针对此类问题,目前采用查找干扰源的方法是用雷达天线在空域进行360˚扫描,找出信号最强的方位,然后联系地方无线电管理委员会派人用专用设备进行侦测 [1] ,采用这种方式面临种种弊端:一是的协调难度大,需要军地双方共同协调解决;二是排查时间长,一般需要三四天,对于间歇工作的干扰源,排查时间更长;三是由于地面多径效应的影响,造成定位不准确;四是受地面建筑物、地形的限制,定位基准点不易确定。
2. 国内外研究现状
无线电定位技术主要是根据无线电信号的参数,利用相匹配的定位算法去计算、推测出目标的位置。无线电定位在于军事和民用领域已得到了广泛的应用,利用不同的定位原理,己经开发出了地面雷达,红外检测,光学检测,无人机,预警,侦察等。对于定位系统大体的分类,可以分为无源定位和有源定位两类。使用有源定位方法时,由于在定位过程中,其发射的电磁波更容易使自己暴露,因此,无源定位技术就成为各国研究的焦点,目前,世界各地都在积极地开发和改进无线电定位技术和相应的设备。在无线电信号测向处理中,通常采用多站测向交会定位 [2] ,这种方法是研究最早、最深入,应用也最广泛的定位方法。
2.1. 国外研究现状
美国的休斯公司、洛克希德-马丁公司等部门的研究人员对于无源定位技术进行了许多且有用的实验,它们之中的洛克希德-马丁公司研制的“沉默的哨兵”系统最具有代表性。
目前,国外的无源定位技术主要是采用了测向(AOA)交会定位、到达时间(TOA)定位、到达时差(TDOA)定位、多普勒频差(FDOA)定位以及联合定位等。除此之外,还产生了单站快速定位技术,如利用“平面外”多路径反射信号、无源测距、相位变化率等技术,目前主要是采用时差定位技术和测向定位技术 [3] 。
2.2. 国内研究现状
相对于国外对无源定位技术的研究,我们国家则在这一领域的研究起步稍晚,20世纪80年代初期才开始出现有关这一方面的理论研究。在我国,许多机构如西安电子科技大学、上海航天局、电子科技大学、国防科技大学等均对该技术做了深入的研究。伴随着科技的进步、研究人员对定位算法的不断改进,无源定位技术不仅在理论上取得了进展,而且在实践上也取得了令人瞩目的进步。
文献 [4] 提出了基于网格化频谱监测结果的无线干扰源的定位算法,在一片加入高斯白衰落或瑞利衰落的待测区域中,设有若干个矩阵排列的无线电监测器,构成一个无线电监测网,用于监测该区域干扰源信号的强度,测出其接收功率的大小,通过对于无线电监测器接收功率的大小进行分析,根据无线电监测器监测的数据,利用该文给出的算法来推测出干扰源所在的区域,并通过仿真给出了验证。
3. 系统方案设计
3.1. 系统结构
图1给出了系统组成及各分系统之间的信息交换。本系统由地面终端子系统、机上通信子系统、图像子系统、定向侦测子系统、飞控子系统共五个子系统组成,除了地面终端子系统外,其余子系统都搭载在无人机平台上。
3.2. 各子系统功能
五个子系统相互配合,共同完成干扰源的侧向定位,并向地面终端回传干扰源图像/视频信息。各子系统功能如下。
1) 地面终端子系统
地面终端子系统主要完成无人机线路规划、无人机飞行控制、干扰源位置计算和图像/视频显示,由便携式计算机、天地通信设备和终端软件三部分组成。
2) 机上通信子系统
机上通信子系统主要完成与地面终端的通信,接收地面终端的指令信息,并将这些指令信息分发给相应的子系统,同时将图像信息、测向信息和无人机位置信息传送给地面终端,供地面终端分析解算。
3) 图像子系统
图像子系统主要完成图像/视频信息的拍摄,为干扰源的排查提供可靠的证据信息。
4) 定向侦测子系统
定向侦测子系统主要完成在指定位置对干扰源进行测向,通过多点交汇定位确定干扰源的位置。

Figure 1. Structure for system configuration and subsystem information exchange
图1. 系统组成及各分系统信息交换图
5) 飞控子系统
飞控子系统主要完成无人机的飞行控制,根据地面终端规划的路径和位置控制无人机飞行或悬停。
3.3. 系统工作流程
系统工作流程如图2所示。
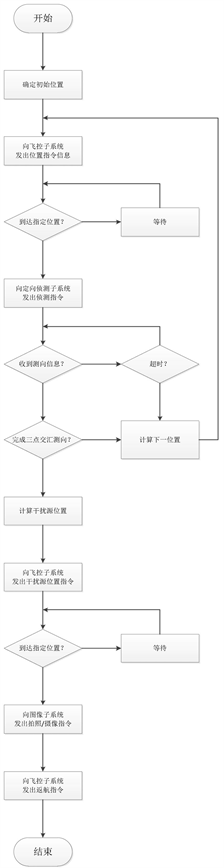
Figure 2. Flow chart for system working
图2. 系统工作流程图
系统开始工作时,首先确定起始位置,起始位置一般选择设备天线附近,以便能够接收到干扰源发出的信号,然后由地面终端向无人机发出位置指令信息,无人机收到指令后开始向目的位置飞行,地面终端软件实时比对目的位置信息和无人机的实际位置信息,当无人机飞抵目的位置后,控制无人机带动定向侦测设备以一定的角速度在水平面上旋转一周,获取干扰源的方向信息。完成一个位置的侧向后,需要计算下一个目的位置,然后将位置信息发送给飞控系统,直到完成三个不同位置的测向,完成三个不同位置的测向后,地面终端软件计算出干扰源的位置,引导无人机飞向干扰源,到达干扰源附近位置后,多角度对干扰源进行拍照,执行完毕后向飞控分系统发出返航指令。
4. 关键算法
4.1. 测向定位算法
侦察测向是利用天线的方向性,即对不同方向到达电磁波的振幅、相位或者时间相应特性,并依此分为振幅法测向、相位法测向和时差法测向。在进行测向时,一般测向天线的尺寸都远小于它与干扰源的距离,到达天线的电磁波近似满足平面波前的条件。
由于机载天线的尺寸通常比较小,因而它的波束宽度比较宽,同时采用宽波束天线也是为了能够快速扫描干扰信号,而宽波束天线的定向精度较低,因而在交会定位时会产生交会模糊区 [5] 。如图3的阴影区所示。
为了减少定位模糊区的面积,需要采用一定的定位策略,理论分析表明 [6] ,当两个侦测点的位置与干扰源连线的夹角在40˚~100˚之间时,定位模糊面积处于最小值附近。
如果不考虑测角误差,假设(a1, e1)、(a2, e2)、(a3, e3)分别为无人机在三个不同位置P1、P2、P3测得的干扰源O的方位角,无人机在P1、P2、P3的经纬高分别为(L1, B1, H1)、(L2, B2, H2)、(L3, B3, H3),首先进行坐标转换,先将无人机的大地坐标系LBH转换为地心系坐标XYZ,然后在地心系内根据所测得的干扰源方位角计算干扰源的地心系坐标值,然后再将地心系坐标转换为经纬高。
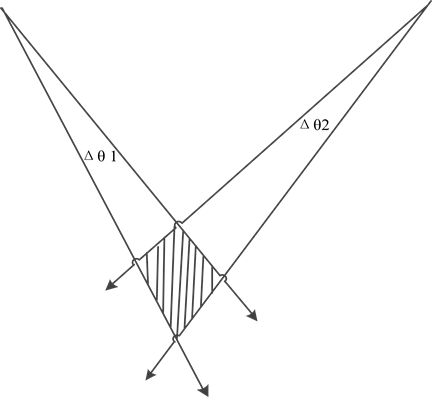
Figure 3. Schematic diagram for intersection direction-finding positioning
图3. 交会测向定位原理示意图
4.2. 无人机线路规划
1) 常用无人机线路规划算法
关于无人机的线路规划算法,主要有蚁群算法(AA) [7] 、遗传算法(GA) [8] 、禁忌搜索等智能搜索算法以及在此基础上的改进算法或者混合算法,文献 [9] 指出了上述算法的优劣:智能算法GA存在编码长度变化范围大、求解效率低等问题,蚁群算法存在容易陷入局部最优等问题。沈阳航空航天大学李光耀通过建立目标函数,规划出基于定向进化算法的无人机最优航迹 [10] 。
由于无人机的续航时间很有限(也就是存在时间约束),需要在限制时间内完成多个位置的定点侦测,同时还要根据运算结果引导无人机接近干扰源,需要科学高效的线航迹划算法。文献 [11] [12] 提出了一种基于时间约束的航路规划算法,本文需考虑的情形与文献 [11] [12] 类似,都需要考虑时间约束的问题。
2) 本文所采用算法
文献 [13] 指出,当测量位置分布在目标位置两侧时,测量精度比在一侧要高。为了获得更高的定位精度,需同时满足文献 [6] 和文献 [13] 的条件,在第一个位置测得干扰源的方向信息后,由于侦测系统只能测向不能测距,不能确定干扰源的大概位置,考虑到无人机的续航能力,同时为了便于计算,首先沿第一次测得的方向呈30˚角飞行2分钟(因为无人机续航时间在20分钟左右,综合考虑测向、拍照、返航时间,确定为2分钟为宜),然后悬停,启动侦测分系统进行测向,理论上讲,两点测向能够定位,实际上,由于测向误差,并不能准确定位,只能确定一个大致区域,确定干扰源所在的区域后,首先确定当满足交汇角在100˚左右的飞行方向,此方向的确定要综合考虑两个测量位置,以飞行路线(包括飞抵干扰源位置拍照)最短为约束条件,由于侦测、拍照的时间是确定的,因此线路规划问题最终转换为满足精度要求的路线最短问题。如图4所示。
其中,位置1与位置2之间的距离是确定的,在位置2测向完成之后,选择从位置2到位置3的方向时,要同时考虑满足三个侦测位置到目标的交汇角满足100˚和三个侦测位置分别位于目标两侧(即目标位置在三个侦测位置构成的三角形内部)。路线规划流程图如图5所示。
3) 算法对比
在仿真实验中,假定干扰源位于5 km × 5 km的区域内,无人机起始位置在(2.5 km, 2.5 km),干扰源位置在该正方形区域内随机出现,无人机巡航速度设置为5 m/s,每个位置的悬停测向时间为2 min,与文献 [7] 、文献 [8] 和文献 [11] 的算法(分别记为“算法1”、“算法2”、“算法3”)进行对比,仿真参数和仿真结果如表1和表2所示。
仿真结果表明,通过采用本文所述的线路规划算法,总时间可以减少15%以上,提高了查找干扰源的效率。

Figure 4. Schematic diagram for path planning
图4. 线路规划示意图

Figure 5. Flow chart for path planning
图5. 线路规划流程图

Table 1. Simulation parameter setting
表1. 仿真参数
Table 2. Simulation result
表2. 仿真结果
5. 结束语
本文主要实现了一种以无人机为平台,搭载无线电测向设备,采用文中所述的测向定位算法和无人机线路规划算法,通过在不同的位置悬停对干扰源进行测向定位,并对干扰源进行拍照录像,快速查找未知干扰源,用于固定站及机动站的测控设备干扰源侦测,为遂行航天测控任务提供良好的电磁环境。
文章引用
顾保国,陈华中,许文彤,吴 迪,郭彦斐. 测控装备干扰源快速侦测系统设计研究
Design and Research of Quick Detection Sys-tem for TT & C Equipment Interference Sources[J]. 计算机科学与应用, 2018, 08(10): 1565-1572. https://doi.org/10.12677/CSA.2018.810171
参考文献
- 1. 于飞, 陈少刚, 张庆国. 一起同频干扰的查处[J]. 电磁频谱管理, 2010(3): 56.
- 2. 金钊. 多站测向交汇数据分析处理探讨[J]. 中国无线电, 2007(10): 53-56.
- 3. 赵国庆. 雷达对抗原理(第二版) [M]. 西安: 西安电子科技大学出版社, 2012.
- 4. 李金山. 基于网格化频谱监测的无线干扰源定位研究[D]. 昆明理工大学, 2017.
- 5. 李慧, 刘昭, 吴国富. 多测站测量角量误差的最小二乘修正[J]. 系统仿真学报, 2005, 17(5): 1072-1075.
- 6. 谭馨. 无线电侦测系统飞行试验的航线规划技术研究[J]. 科技创新, 2016(14): 31-32.
- 7. Cui, C., Wang, N. and Chen, J. (2014) Improved Ant Colony Optimization Algorithm for UAV Path Plan-ning. IEEE International Conference on Software Engineering and Service Science, 291-295.
- 8. 牟衔臣, 谢东来, 闫威, 等. 基于遗传算法航路规划TSP问题的研究[J]. 系统仿真学报, 2013, 25(S): 86-89.
- 9. 李军华, 刘群芳. 基于稀疏A*算法与文化算法的无人机动态航迹规划[J]. 应用科学学报, 2017, 35(1): 128-138.
- 10. 李光耀. 基于定向进化算法的无人机航迹规划研究[D]. 沈阳航空航天大学, 2018
- 11. 朱黔, 周锐. 具有持续侦察时间约束的协同航路规划[J]. 北京航空航天大学学报, 2016, 42(10): 2130-2138.
- 12. Meyer, Y., Isaiah, P. and Shima, T. (2015) On Dubins Paths to Intercept a Moving Target. Automatica, 53, 256-263. https://doi.org/10.1016/j.automatica.2014.12.039
- 13. 程军, 张伟, 吴新科. 基于总体最小二乘的光学交汇定位方法[J]. 兵器试验, 2009(6): 14-18.