Mechanical Engineering and Technology
Vol.
10
No.
03
(
2021
), Article ID:
43368
,
19
pages
10.12677/MET.2021.103040
爬壁机器人的研究现状与发展趋势
黄龙1*,张卫华1,陈今茂1,管金发2,王建超1,王耀辉1
1军事科学院系统工程研究院军事新能源技术研究所,北京
2陆军勤务学院,重庆

收稿日期:2021年3月23日;录用日期:2021年6月15日;发布日期:2021年6月24日

摘要
爬壁机器人是可以在一定角度的壁面上稳定吸附、行走并工作的机器人,近年来在多个工业领域得到应用。本文根据吸附方式的不同将爬壁机器人分为负压吸附、磁吸附、抓扣式吸附和仿生吸附四类,并分别介绍了各类机器人的研究现状和热点,最后根据爬壁机器人的应用需求和技术发展提出了其发展趋势,认为未来爬壁机器人将向着多智能化、功能化、轻量化和无缆化发展。
关键词
爬壁机器人,研究现状,发展趋势

A Review and Trend of Wall-Climbing Robots
Long Huang1*, Weihua Zhang1, Jinmao Chen1, Jinfa Guan2, Jianchao Wang1, Yaohui Wang1
1 Institute of Military New Energy Technology, Institute of Systems Engineering, Academy of Military Sciences, Beijing
2Army Logistics University of PLA, Chongqing

Received: Mar. 23rd, 2021; accepted: Jun. 15th, 2021; published: Jun. 24th, 2021

ABSTRACT
Wall-climbing robot is a robot that can adhere, locomote and work on a sloping or vertical wall, which is widely applied in industry. In this paper, Wall-climbing robots are classified into Magnetic adhesion robots, pneumatic adhesion robots, mechanical adhesion robots and biomimetic adhesion robots according to their adhesion principles. The present condition and research hotspot of each type of wall-climbing robots are reviewed. And the recent trends of the wall-climbing robots are summarized according to application demand and technology development, which are multi-function, Intellectualization, lightweight, and wireless.
Keywords:Wall-Climbing Robot, Present Research Condition, Research Trend

Copyright © 2021 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
机械化、智能化是当前世界各国正在努力发展的方向,“中国制造2025”、“德国工业四代(Industry 4.0)”、“美国工业互联网”都对智能机器人的发展做出了规划,爬壁机器人是移动机器人领域的一个重要分支,在核工业、石油化工、建筑业、造船业、航空航天、市政工程以及军事、警备、消防等多方面都有广泛的应用 [1] [2]。
2. 爬壁机器人研究现状
爬壁机器人相比于普通移动机器人的区别在于,普通机器人一般在平地运动而爬壁机器人在与水平面有角度的壁面甚至是悬垂壁面运动,因此爬壁机器人最大的一个特征是有壁面吸附机构,使之能吸附在壁面上。根据爬壁机器人的吸附机理,可以将爬壁机器人分为负压吸附、磁吸附、抓扣式吸附和仿生吸附四类。吸附方式不同的爬壁机器人结构不同,应用领域也存在较大差异,下面就对四类不同吸附方式的爬壁机器人发展现状进行简单介绍。
2.1. 负压吸附爬壁机器人
负压吸附是利用机构在机器人和壁面之间产生一个相对于大气压力的负压,从而使机器人压在壁面上。该吸附方式对壁面材质的要求不高,因此应用较为广泛。负压吸附爬壁机器人是最早出现的爬壁机器人,由日本大阪府立大学在1966年开发,开启了爬壁机器人的科学研究,1975年他采用单吸盘结构研制了更实用的第二代爬壁机器人样机 [3]。由于单吸盘结构可靠性存在问题,一旦漏气可能会造成机器人坠落等严重事故,因此多吸盘机构的机器人得到发展。所谓多吸盘是指有两个及以上的吸盘,可提供更强大的吸附力及可靠性。多吸盘吸附机器人出现于上世纪80年代,并在世界范围内引起研究者的重视,日本、美国、英国、意大利、韩国、加拿大等国都研制了相关机器人,有的已经开始实用。美国纽约城市大学Jizhong Xiao等研制了City Climber系列机器人,如图1所示。该机器人采用了模块化设计,用两个相同的机器人单元进行连接式可实现壁面的过渡或者越障,如图1中右侧所示。该机器人自动化程度较高,可用于搜索和救援、武器及工具交付、侦察等,有效载荷4.2 kg [4]。意大利卡塔尼亚大学的D. Longo设计了Alicia系列机器人,其I型、II型和3型机器人分别如图2(a)~(c)所示。其中I型为原理验证型号,自重2 kg,无负载能力;II型为定型结构,自重3.5 kg,可负重10 kg;而3型则是为了解决机器人越障而设计,通过连杆将多个Alicia II型机器人连接起来,通过各个吸盘的交替抬起与吸附实现越障 [5]。

Figure 1. City Climber wall-climbing robot [3]
图1. City Climber爬壁机器人 [3]
 (a) Alicia I
(a) Alicia I
 (b) Alicia II
(b) Alicia II
 (c) Alicia III
(c) Alicia III
Figure 2. Alicia series wall-climbing robots [5]
图2. Alicia系列爬壁机器人 [5]
我国的爬壁机器人研究起步较晚,哈工大机器人研究所、沈阳自动化所等5家单位于1988年在863计划支持下开始研制我国第一台爬壁机器人,用于检测核废液储罐的焊缝缺陷,随后又研制了CLR-I型和CLR-II型壁面清洗机器人,用于瓷砖壁面的清洗 [1]。北京航空航天大学研制了一系列蓝天洁士玻璃幕墙清洗机器人,如图3所示。该系列机器人采用十字框架结构,靠相互垂直的支架间的相互滑动来实现机器人的行走。该机器人还带有液体回收装置,可回收90%清洗液体,较为环保。蓝天洁士1代清洗能力达到37.5 m2/h,但是不能在竖直平面上工作。蓝天洁士2代的吸盘数量增加至16个,可吸附45 kg重量,并能在垂直壁面上工作。蓝天洁士3代结合前两代的优点,清洗能力达到125 m2/h,并在上海科技博物馆幕墙清洗中得到了应用 [6]。现在负压吸附爬壁机器人已广泛运用于各行各业,哈尔滨工业大学研制了一款低噪声负压吸附爬壁机器人,如图4所示,该机器人可无线控制,一米距离直接测量噪声小于70 dB,续航时间45分钟 [7]。南京航空航天大学研制了一款如图5所示的双框架飞机蒙皮检测机器人,采用负压吸附,并对该机器人的吸附力控制、爬行姿态控制和气动系统等做了研究 [8]。
负压吸附是爬壁机器人最初采用的吸附方式,相关的研究较多,但仍有几个问题需要解决,同时也是负压吸附爬壁机器人研究的热点。首先是噪声问题,气体流动产生声音,负压吸附爬壁机器人需要持续性的负压,必然产生较大的噪声,而噪声会对工作环境产生不利影响。解决噪声可以从声源和传播途径两方面下功夫 [7],例如提高吸附效率、降低风扇转速、合理优化流道压力和气流等,近年来流行的真空泵能产生较大负压同时噪声较低,但是对壁面要求较高,一般采用多足运动方式,速度较低;对于传播途径降噪,主要是采取隔声或者吸音材料制作爬壁机器人外壳,降低噪声传播距离。另一个问题是负压的密封,负压吸附爬壁机器人要维持密封吸盘内的负压才能吸附在墙壁上,但同时机器人需要移动,因此负压吸附爬壁机器人密封机构必须具有摩擦力小且密封效果好且能越过一定的障碍和沟壑。这对密封材料提出了较高要求,既要有一定的刚度保持密封又要有一定的弹性适应不同壁面,同时还需兼顾耐久性,意大利Alicia机器人 [5] 吸盘采用迷宫式密封,在吸盘外围有数层同心的特富龙–猪鬃封圈,猪鬃密封圈中间,提供一定的刚度,特富龙密封圈锁住气流。哈尔滨工业大学采用的是另一种新型的密封吸盘机构,其特点是与壁面是一种覆盖着化学纤维的充气橡胶管,充气胶管可随壁面变形,化学纤维增加表面的润滑,减小摩擦,同时提高耐磨性能 [7]。第三是吸附的稳定性,负压吸附容易存在密封失效问题,一旦漏气可能会造成机器人坠落等严重事故,因此多吸盘机构的机器人得到发展。所谓多吸盘是指有两个及以上的吸盘,可提供更强大的吸附力及可靠性。例如前述提及的美国City Climber爬壁机器人 [4]、意大利Alicia III型机器人 [5] 和南京航空航天大学研制的飞机蒙皮检测机器人 [8] 均采用的是多吸盘机构,利用模块化思想,同时解决吸附稳定性和越障能力,是负压吸附爬壁机器人的一大发展方向。

Figure 3. CLR robot [6]
图3. 蓝天洁士机器人 [6]

Figure 4. Surveillance robot [7]
图4. 侦察爬壁机器人 [7]

Figure 5. Aircraft skin detection robot [8]
图5. 飞机蒙皮检测机器人 [8]
2.2. 磁吸附爬壁机器人
在大型储罐等导磁体壁面上进行作业时,很自然可以想到用提供磁铁机器人所需吸附力。磁力吸附较负压吸附更为可靠,不会发生漏气等现象,根据磁吸附方式的不同,又可以分为永磁吸附和电磁吸附。电磁吸附可以调节电流从而调节磁力大小,控制较为灵活,但是耗电量大不利于无线操控,同时存在断电坠落的风险;永磁吸附更为可靠,但体积较大,吸附力调节困难。
磁吸附爬壁机器人同样首先在日本发展起来,1984年日立制作所研制了八足磁吸附爬壁机器人,机器人内外层各四只脚,交替吸附滑动来实现机器人的移动,同时期还研制了多种包括轮式、履带式以及足式(步行)等多种磁吸附机器人 [9]。随后磁吸附爬壁机器人在世界引起广泛关注,在大型钢质壁面的检测、清洗、焊接等方面应用日益增多。葡萄牙科英布拉大学研制了一款三轮磁吸附机器人,如图6所示,该机器人磁轮结构特殊,由多块小型磁铁构成,可适应各种不同曲率的曲面和各种导磁率的材料 [10]。法国南特中央理工学院设计了一种船用焊接机器人,如图7所示,该机器人能吸附包括自重在内的100 kg重量,采用激光传感器获取路径信息,嵌入了微型计算机进行机器人控制,能完成直线焊接任务,减轻焊接工人负担 [11]。德国不莱梅机器人创新中心采用磁吸附技术研发了一款两轮爬壁机器人,如图8所示,该机器人的定位装置先进,能够提供机器人的实时三维姿态,主要用于船舶壁面检测 [12]。

Figure 6. Portuguese OmniClimbers [10]
图6. 葡萄牙OmniClimbers [10]

Figure 7. French welding robot [11]
图7. 法国焊接机器人 [11]

Figure 8. German robot for ship inspection [12]
图8. 德国船舶检测机器人 [12]
国内的磁吸附爬壁机器人同样是由哈尔滨工业大学首先在863计划支持下开始研究 [13],90年代已研制了多款用于储罐检测、喷漆、喷砂的磁吸附爬壁机器人,并带动了磁吸附爬壁机器人在国内的推广应用。2004年清华大学研制了一款名为TH_Climber I的履带式磁吸附爬壁机器人,如图9所示。该履带式爬壁机器人负载能力大于20 kg,最高直线行驶速度可达8 m/min,能够跨越高度约为10 mm的叠焊焊缝 [14]。2017年上海交通大学研制了一种永磁吸附焊接机器人,如图10所示,该机器人有三个轮组,分别可以分别升降从而跨越障碍 [15]。南华大学也研制了一款履带式磁吸附爬壁机器人,如图11所示,该机器人完成度较高,在负重80 kg的情况下仍可翻越25 mm高障碍物,最大行进速度可达到9 m/min,可在100 m距离进行远程控制。配合高压水射流除锈系统,该机器人除锈速度可达45 m2/h,除锈等级可达到Sa2.5 [16]。

Figure 9. TH_Climber I robot [14]
图9. TH_Climber I机器人 [14]

Figure 10. Magnetic adhesion welding robot [15]
图10. 磁吸附焊接机器人 [15]

Figure 11. Ship derusting robot [16]
图11. 船舶除锈机器人 [16]
磁吸爬壁机器人是近年来发展最为迅速的机器人,在造船、石化、核电等行业已有较多应用。前述已提及可分为电磁吸附和永磁吸附两种方式,因电磁吸附存在断电掉落风险,且需要额外消耗爬壁机器人携带的宝贵能量,近年来随着磁性材料的突破,商用的钕铁硼磁铁表面磁力达到50 MGOe,可以吸附超过自身重量100倍的物体,因此采用永磁吸附的爬壁机器人已逐渐成为主流。永磁吸附吸力稳定可靠但存在磁力大小难以调节,机器人转向或取下较为困难。因此爬壁机器人磁吸附单元结构设计成为关键,近年来数值仿真技术的发展提供了很大的助益,王吉岱等 [17] 运用ANSYS软件中Ansoft-Maxwell模块对永磁轮进行建模仿真,计算磁路磁力线以及磁感应强度分布,进而优化了磁轮的轭铁厚度和气隙厚度等。为解决永磁吸附磁力大小不可调,取下困难等问题,研究者开发了变磁力永磁吸附单元,主要有两种方式。王军波等 [18] 设计了一种新型的磁吸附单元,如图12所示。径向磁化圆柱形永磁体位于长方形铁轭中心的通孔中,永磁体可以在通孔中转动,当机器人需要与壁面吸附时,永磁体磁通与壁面闭合,吸力最大;当机器人需要与壁面脱落时,永磁体转过90˚,磁通与铁轭闭合吸力最小。另一种是采用永磁铁与电磁铁结合的方式,机器人工作时电磁铁不通电,永磁铁提供吸附力,当机器人需要与壁面脱落时电磁铁通电抵消永磁铁磁力,从而使机器人便于脱离壁面 [19]。

Figure 12. Adhesion device with variable magnetic force
图12. 变磁力吸附单元
2.3. 机械抓扣式吸附爬壁机器人
在高灰尘或者高湿度粗糙壁面上,磁吸附和负压吸附可能都难以适应或者稳定性不足,一种新的抓扣式的吸附机器人应运而生。其原理是用钩爪(刺)抓扣住粗糙壁面的凸起(或凹陷),实现在粗糙壁面上的吸附。该吸附方式的主要优点在于吸附机构的能耗比负压吸附或电磁吸附低,以及对粗糙或结构表面的适用性以及安全性较高,尤其是基于抓扣的附着力是比较安全的,因为即使失去动力也不一定会导致机器人的坠落。另一方面,抓扣式爬壁机器人一般速度较慢,可操作性有限。此外,与使用磁吸附或者负压吸附机器人相比,它们的有效载荷一般更低。
物理抓扣吸附的机器人还可分为两类,一类是采用微型钩刺,能在粗糙壁面如织物、树干、水泥墙、砖面上爬行,如图13所示。这一类机器人在美国的研究较为领先,图13所示为斯坦福大学2004年研制的一种抓扣式机器人Spinybot II的手臂末端形态。该机器人可以攀爬平坦、坚硬的壁面,如混凝土、砖块、灰泥和砖石墙面。该机器人模仿蜘蛛等攀爬机理,在手臂末端安装了一系列的微型刺,直径达200 μm,末端更是小至25 μm。该机器人自重0.4 kg,可负重0.4 kg,爬行速度可达2.3 cm/s [20]。以色列本古里安大学设计了一款四足机器人CLIBO,如图14所示。该机器人每个足部上装有12个鱼钩状的钩刺,每个钩刺互不影响,都可以在垂直壁面的平面内前后运动,而不能左右移动或扭曲,从而避免了钩刺间缠绕,更能适应凹凸不平的粗糙壁面。该机器人自重2 kg,体长0.75 m,能负重2 kg,爬行速度12 cm/s [21]。日本千叶工业大学2014年设计了一个微型六足爬壁机器人,同样采用钩爪吸附,如图15所示,该机器人每个足部分两组,每组有4个微型钩爪,能够在混凝土墙面爬行,但是速度较慢 [22]。

Figure 13. Spinybot II robot [20]
图13. Spinybot II机器人 [20]

Figure 14. CLIBO robot [21]
图14. CLIBO机器人 [21]
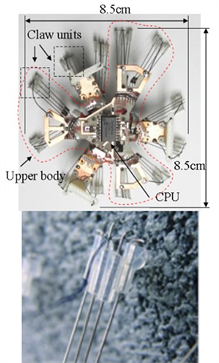
Figure 15. Japanese hexapod robot [22]
图15. 日本六足机器人 [22]
国内最近几年对微型钩刺爬壁机器人也有所研究,哈尔滨工程大学的陈东良等人设计了一种粗糙壁面爬行机器人,如图16所示,机器人采用6足结构,足端部由多个钩刺组成,具有俯仰和伸缩自由度,能随墙壁的粗糙程度自行调整起伏,吸附较为可靠 [23]。南京航空航天大学赵智慧研制了一种钩爪式四足爬壁机器人,如图17所示,该机器人足部吸附结构较为简单,采用2.5 mm厚的橡胶作为脚掌材料,每个脚掌前端呈扇形分布着十个长条状的脚趾,脚趾前段安装了直径0.4 mm的针刺。经测试该机器人在18目细砂墙面爬行时速度可达8.8 cm/s,动态负载达到500 g [24]。西安理工大学刘彦伟等人2019年研制了一种履带式钩刺吸附机器人,如图18所示,机器人由履带主体和尾部结构组成,由一个凸轮机构控制爪刺的吸附和脱附,爬行时同时有6对爪刺对抓足处于吸附状态,在砖面上能承受5倍自重的负载 [25]。

Figure 16. Rough wall climbing robot [23]
图16. 粗糙壁面爬行机器人 [23]

Figure 17. Quadruped wall-climbing robot [24]
图17. 四足爬壁机器人 [24]

Figure 18. Wall-climbing robot with spiny grippers [25]
图18. 爪刺对抓足机器人 [25]
另一类抓扣式爬壁机器人则是需要特定的环境下才能完成吸附,比如2004年斯坦福大学设计了一种爬壁机器人LEMUR IIb,如图19所示。该机器人有四条手臂,手臂末端是夹紧装置,如同手一样需要墙壁有凸出物作支撑点,可以在野外自然石壁自由的攀爬,但该机器人运动速度很慢,一步动作最长需要5秒以上,甚至达到17.3秒 [26]。中科院深圳先进技术研究院和香港中文大学联合研制了一种爬树机器人Treebot,如图20所示,该机器人有上下两个抓附机构即所谓的全向抓树器,每个全向抓树器有四个互相独立的弧形钩爪,可以适应不同直径、方向和形状的树干 [27]。大阪大学2006年研制了一种六足爬壁机器人ASTERISK,如图21所示,该机器人只能攀爬网状壁面,依靠螺帽形状足端部钩附在网上,通过六足的相互协调,可以实现全方位的移动。该机器人可应用于核工业和消防赈灾等领域 [28]。

Figure 19. LEMUR Iib robot [26]
图19. LEMUR IIb机器人 [26]

Figure 20. Treebot [27]
图20. Treebot机器人 [27]

Figure 21. ASTERISK robot [28]
图21. ASTERISK机器人 [28]
以上可以看出机械抓扣式爬壁机器人多种多样,但其共同点是有多个足或者模块轮流交替抓扣在壁面上,从而实现吸附和移动。因此此类爬壁机器人核心和难点在于控制,一是足端控制,在该足作为吸附支撑时紧扣在壁面上,而作为移动足时能放松壁面进行移动,例如Spinybot II机器人 [20] 的足部吸附和放松是由一个欠驱动机构实现,该欠驱动机构主要由RC伺服电机和一条弹性胶带组成,由电机的来回运转实现爪刺的抓紧和放松。另一类控制是对爬壁机器人整体运动或者步态的控制。由于机械抓扣式爬壁机器人多采用多足结构,要实现爬壁机器人的移动,需要各个足部按照特定规律有序的移动。这种多足机器人运动学控制在地面机器人领域已有大量研究,但仍不能说达到成熟,在爬壁机器人领域该方面的研究则更为生涩,目前的目标仍是使爬壁机器人沿着规划路线稳定爬行,而不像地面机器人一样涉及到奔跑、跳跃等复杂动作。由于足的数量不同,不同爬壁机器人的运动学控制也千差万别,一种常用的方式是模仿动物的爬行方式,由Glodman等 [29] 从蟑螂总结出一种爬行的步态模型——FG模型,已经成功运用到多种爬壁机器人的运动控制中 [30] [31],阮鹏等 [32] 模仿壁虎运动行为,规划了一种对角步态,通过ADAMS仿真,机器人爬行速度可达11.85 mm/s。
2.4. 仿生吸附爬壁机器人
仿生吸附是指模仿生物(主要是壁虎类)的吸附方法。壁虎的脚掌具有特殊的微观结构,国外的研究认为壁虎的刚毛末端分叉特征尺寸仅为200 nm,壁虎脚趾与壁面的吸附力主要是分子间作用力 [33],使壁虎可以在各种壁面上自由爬行,速度可达1 m/s。目前这一理论基本己得到领域内的公认。基于此理论现在已经发展了多种爬壁机器人。
美国在仿生爬壁机器人领域处于领先状态。卡耐基梅隆大学2004年开始研制了一款坦克样式的仿生爬壁机器人Tankbot,如图22所示,采用微成型模具制造技术,形成了直径4 μm仿刚毛纤维,制作出仿壁虎的吸附履带。该机器人可在与地面呈110度角的壁面上行驶,但无法转弯 [34]。美国斯坦福大学2007年报道了一种仿生机器人Stickybot,如图23所示,该机器人脚掌与真壁虎相似,由四个脚趾组成,每个脚趾上覆盖着毫米级的有机物薄层,薄层上密布直径380 μm刚毛,刚毛与基底成20˚角,顶端呈45˚的楔形。Stickybot能在竖直的光滑壁面如玻璃、光滑瓷砖、亚克力和抛光花岗岩等表面行走,速度达4 cm/s [35]。2008年加拿大西蒙弗雷泽大学开发了一种仿蜘蛛外形的机器人Abigaille-I,如图24所示,该机器人采用光刻的方式在PDMS基底上刻出了5~10 μm宽、20~60 μm高的粘附阵列,能稳定粘附在60度壁面上,但行走时需要提供预压紧力,2.7 w的动力能支撑起在50度壁面上行走 [36]。

Figure 22. Tankbot [34]
图22. Tankbot [34]
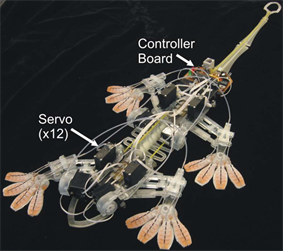
Figure 23. Stickybot [35]
图23. Stickybot [35]
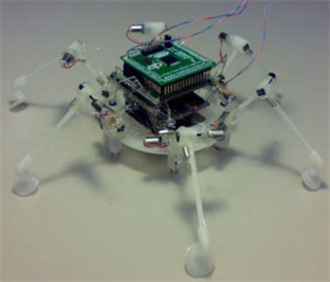
Figure 24. Abigaille-I [36]
图24. Abigaille-I [36]
国内对仿生吸附爬壁机器人研究起步较晚,南京航空航天大学总结壁虎运动规律,在2010年前后设计了IBSS系列机器人,IBSS_Gecko_4型爬壁机器人如图25所示。该机器人吸附力来源为硅橡胶聚合物制作的微粘附阵列,单腿有6个自由度,能够在90度的光滑墙面上爬行 [37]。此外,南京航空航天大学还将仿生吸附爬壁机器人用于微重力空间环境,模拟了仿壁虎机器人在微重力环境下的运动轨迹,试验发现机器人能以1 cm/s的速度稳定爬行,如图26所示 [38]。中国科学院合肥物质科学研究院也研制了一种履带式仿生吸附爬壁机器人,如图27所示,该机器人与卡耐基梅隆大学的Tankbot较为相似,粘附力来源于直径5 μm,高20 μm的PDMS粘附阵列,该机器人可以在90度的光滑木质表面和玻璃表面爬行 [39]。

Figure 25. IBSS_Gecko_4 [37]
图25. IBSS_Gecko_4 [37]

Figure 26. Wall-climbing robot in microgravity space [38]
图26. 微重力空间爬壁机器人 [38]

Figure 27. Tank-like Climbing Robot [39]
图27. 履带式爬壁机器人 [39]
在采用微型刚毛吸附的爬壁机器人之前,传统爬壁机器人通常仅仅在躯体结构上进行模仿,而并没有对吸附原理进行模仿。相比之下,壁虎刚毛粘附具有较多优点。首先,壁虎刚毛粘附可控性好。研究发现,壁虎通过切向运动施加或卸去切向摩擦力,可以方便地控制脚趾的吸附于脱离,吸附时单根刚毛法向粘附力最高可达40 μN,粘附强度可达0.576 N/mm2,可提供的吸附力远超自身重力 [40]。由于分子间力普遍存在,因此仿生吸附可不受真空等外界条件限制,理论上可在任意材料商吸附;此外,仿生吸附靠自然存在的分子间作用力,几乎不需要额外能量,耗能少。上世纪以来集成电路和微机电系统工艺的迅速发展使人为制造纳米级别的微型仿生结构成为可能,目前制作仿生吸附材料的方法主要有两种,一种是微机电系统工艺在高聚物基底上制造微纳米阵列,另一种是通过气象沉积法制备具有高长径比的碳纳米管阵列 [41]。相比其他类型的爬壁机器人,仿生吸附爬壁机器人起步较晚,目前研究仍未成熟,大多数样机基本仍处于实验室阶段,离实用尚有一段距离,而研究者关注的热点或者需要解决的问题主要有以下几点。一是仿壁虎粘附材料的制备,研究者对不同基底材料、不同制备方法、不同阵列形状等的仿壁虎吸附材料进行了探索,取得了一些成果,但尚未形成体系,吸附效果离真正的壁虎刚毛阵列也相差较大,自净性、易脱附性也都与真正的壁虎刚毛相去甚远。二是壁虎刚毛粘附系统建模与力学分析,从力学本质分析壁虎刚毛吸附的基本原理,从而提升人工仿生材料的吸附性能,较为经典的模型有分子间力模型 [42]、JKR接触理论模型 [43],Kendall粘附带模型 [44] 等,但还没有一种较为成熟的模型可以完美的解释壁虎的吸附机理。三是壁虎脚趾行为分析和模仿,据观察,壁虎脚掌至少有23个自由度,脚趾的外翻和内收可控制粘附和脱附,掌握并模仿壁虎脚趾行为可大大提高人工材料的性能 [45]。四是仿生爬壁机器人的设计及应用,仿生吸附长远来看具有适用性广、能耗少等优点,但目前应用尚少,研究者应结合仿生吸附材料的吸附特性,合理设计爬壁机器人,推广其在侦查、探测等方面的应用。
3. 爬壁机器人发展趋势
由于爬壁机器人可以攀爬的特殊属性,可以替代人类完成大量高空危险或者不可完成的工作,因此随着技术的发展,爬壁机器人必将拥有更广阔的前景。从上文已经可以看出,各领域爬壁机器人的研究已将较为繁荣,但其工程应用还需要更进一步推广,从需求侧推导,今后爬壁机器人将从以下几个方面发展。
3.1. 智能化
智能化是所有机器人发展的终极方向,爬壁机器人也不例外。目前爬壁机器人需要实现的智能化包含两个方面:一是实现爬壁机器人行走的智能化,二是爬壁机器人作业的智能化。爬壁机器人攀爬的壁面一般是人类难以到达或不方便达到的,有时甚至难以直接观察,因此未来爬壁机器人需要实现自主探测环境、自主避障、自主规划路线并自主控制行走机构到达目标点,最终实现爬壁机器人智能行走。智能机器人本身具有完备的感知、决策和执行等模块,可以像人类一样独立完成任务。要实现以上智能化功能,爬壁机器人还有很长的路要走,需要解决的问题包括但不限于以下几个方面。首先是机器人自主环境探测,在未知的环境中,机器人需要首先需要感知环境,建立环境和自身的地理信息。机器人感知环境主要通过传感器,而传感器多种多样,如采用红外、压力、超声波、化学反应传感器等,而最近研究较多的是视觉传感,即所谓的机器视觉,借助CCD或CMOS摄像头获取环境信息,通过图像处理,生成环境信息,使机器人可以自主的在复杂环境中工作,如朱凌峰设计了基于单目视觉的爬壁机器人定位系统,可在一定墙面范围内实现爬壁机器人的方位检测 [46]。其次路径规划和跟踪也是爬壁机器人迈向智能得一大难点。路径规划分为全局路径规划和局部路径规划,全局路径规划求解的精度更高但需要全局环境信息,计算量较大且动态环境适应能力较差;局部路径规划可根据传感器信息实时避障,结合机器视觉等技术能实现机器人智能攀爬,动态环境适应能力强,缺点是仅依靠局部信息可能产生局部极值点,机器人避过障碍却无法按路径到达目标点。路径规划和控制算法多种多样,路径规划常用方法有可视图法、格栅法、拓扑法、人工势场法,近年来流行模糊控制法、遗传算法、神经网络法等。路径跟踪算法有滑模控制法、回退法、模糊控制法等,近年来国内外学者还采用神经网络法与其他方法结合提出了许多新的路径跟踪控制方法,推进了机器人的自主路径规划和跟踪的发展。此外,爬壁机器人壁面行走目的是完成作业任务,未来爬壁机器人还需要根据环境自主判断并控制作业执行机构完成作业任务。不同的任务有不同的作业执行机构,最终的智能化爬壁机器人应该能实现根据不同的任务需求和环境自行采用不同的执行机构或工具完成作业任务。
3.2. 多功能化
目前爬壁机器人多为某种单一的任务而设计,如壁面清洗或除锈,但实际上这可能只是壁面作业的一道工序,壁面清洗后往往还需要检测、焊接、喷涂等。未来爬壁机器人将向着多功能融合方向发展,由爬壁机器人提供平台,集成多种功能执行机构,根据任务需求依次序或同时完成多种任务,这将成倍的提高爬壁机器人工作效率,使爬壁机器人的应用更加广泛。例如文江川等人设计的墙面清洁、探伤机器人依靠携带的清洁工具和传感器,一次行走可以实现墙面清洁和墙体裂纹探伤、定位等功能,避免了人工作业的风险,提高了工作效率 [47]。
3.3. 轻量化
轻量化是爬壁机器人一直以来的追求。爬壁机器人不同于普通机器人就在于需要在有一定角度的壁面上爬行,除克服自身重力外还要负载任务执行机构,而爬壁机器人的吸附能力是有限的,因此在满足功能的前提下,爬壁机器人需要尽可能轻量化、小型化,采用新型材料、结构和吸附技术,尽量降低爬壁机器人自身的质量。例如目前仿生爬壁机器人机身大多由有机合成材料制作,质量仅为几百克。
3.4. 无缆化
爬壁机器人的无缆化对应的是能源问题,目前较为大型的爬壁机器人需要背负缆绳为自身吸附、行走和执行机构供能,这不仅增加机器人负重而且容易发生因线缆缠绕、摩擦带来的安全风险。随着能源技术的发展,特别是电池技术和无线传能技术的发展,爬壁机器人将摆脱线缆的束缚,更加灵活的完成各项工作。
3.5. 三维空间表面无障碍运动能力
目前爬壁机器人大多是针对特定的壁面而设计的,磁吸附爬壁机器人需要壁面具有磁性,真空吸附爬壁机器人要求壁面较为平坦,遇到沟壑或凸起容易失效,机械抓扣式爬壁机器人大多针对特定环境,仿生吸附目前尚不成熟,在光滑壁面上吸附效果较好,遇到灰尘、凹凸不平的壁面时吸附能力不足,且负载能力较弱。未来爬壁机器人可能会面对多种多样的工作环境,例如城市或者桥梁攀爬时可能遇到较为规则的金属壁面也可能遇到各种形状的护栏、拉索以及水泥壁面,目前的机器人无法完成在整个环境中任意的攀爬运动。因此,吸附技术仍是爬壁机器人需要继续突破的关键点,使爬壁机器人吸附稳定性更高,适应环境能力更强,实现三维空间表面无障碍运动能力。目前实现多环境适应的方法之一是多吸附原理的结合,如岳一领等 [48] 设计了一种多功能攀爬机器人,同时拥有机械夹持和永磁体两种吸机构,通过巧妙地变形机构使机器人可以在爬杆和爬壁形态之间切换,使爬壁机器人可适应两种不同的环境。
文章引用
黄 龙,张卫华,陈今茂,管金发,王建超,王耀辉. 爬壁机器人的研究现状与发展趋势
A Review and Trend of Wall-Climbing Robots[J]. 机械工程与技术, 2021, 10(03): 345-363. https://doi.org/10.12677/MET.2021.103040
参考文献
- 1. 刘淑霞, 王炎, 徐殿国, 赵言正. 爬壁机器人技术的应用[J]. 机器人, 1999, 21(2): 148-155.
- 2. 商慧亮, 朱子健, 李成芳, 郭安. 爬壁机器人在市政领域中的应用研究[J]. 中国市政工程, 2018(6): 78-81, 106.
- 3. Yano, T., Numao, S. and Kitamura, Y. (1998) Development of a Self-Contained Wall Climbing Robot with Scanning Type Suction Cups. Proceedings of 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems. Innovations in Theory, Practice and Applications, Victoria, 17 October 1998, 249-254. https://doi.org/10.1109/IROS.1998.724627
- 4. Xiao, J., Morris, W., Chakravarthy, N. and Calle, A. (2006) City Climber: A New Generation of Mobile Robot with Wall-Climbing Capability. Unmanned Systems Technology VIII, Orlando, 9 May 2006, Article ID: 62301D. https://doi.org/10.1117/12.666374
- 5. Longo, D. and Muscato, G. (2004) A Modular Approach for the Design of the Alicia3 Climbing Robot for Industrial Inspection. Industrial Robot, 31, 148-158. https://doi.org/10.1108/01439910410522838
- 6. Zhang, H., Zhang, J., Wang, W., Liu, R. and Zong, G. (2007) A Series of Pneumatic Glass-Wall Cleaning Robots for High-Rise Buildings. Industrial Robot, 34, 150-160. https://doi.org/10.1108/01439910710727504
- 7. 吴善强. 低噪声负压吸附爬壁机器人系统的研究[D]: [博士学位论文]. 哈尔滨: 哈尔滨工业大学, 2007.
- 8. 陈磊. 飞机蒙皮检测机器人曲率自适应姿态控制策略研究[D]: [硕士学位论文]. 南京: 南京航空航天大学, 2016.
- 9. 潘沛霖, 韩秀琴, 赵言正, 闫国荣. 日本磁吸附爬壁机器人的研究现状[J]. 机器人, 1994, 16(6): 379-382.
- 10. Tavakoli, M., Viegas, C., Marques, L., Norberto Pires, J. and de Almeida, A.T. (2013) OmniClimbers: Omni-Directional Magnetic Wheeled Climbing Robots for Inspection of Fer-romagnetic Structures. Robotics & Autonomous Systems, 61, 997-1007. https://doi.org/10.1016/j.robot.2013.05.005
- 11. Kermorgant, O. (2018) A Magnetic Climbing Robot to Perform Autonomous Welding in the Shipbuilding Industry. Robotics and Computer-Integrated Manufacturing, 53, 178-186. https://doi.org/10.1016/j.rcim.2018.04.008
- 12. Eich, M. and Vögele, T. (2011) Design and Control of a Light-weight Magnetic Climbing Robot for Vessel Inspection. 2011 19th Mediterranean Conference on Control & Automation (MED), Corfu, 20-23 June 2011, 1200-1205. https://doi.org/10.1109/MED.2011.5983075
- 13. 门广亮, 赵言正, 王炎. 磁吸附爬壁机器人控制系统的研究[J]. 控制工程, 1995(5): 40-42.
- 14. 田兰图. 油罐检测爬壁机器人技术及系统研究[D]: [硕士学位论文]. 北京: 清华大学, 2004.
- 15. 潘根. 自主全位置移动爬壁越障焊接机器人控制系统研究[D]: [硕士学位论文]. 上海: 上海交通大学, 2017.
- 16. 胡绍杰. 履带式船舶除锈爬壁机器人设计及其吸附单元优化研究[D]: [硕士学位论文]. 衡阳: 南华大学, 2019.
- 17. 薛珊, 冯志强, 徐龙, 赵运来, 吕琼莹. 基于ANSYS的爬壁机器人永磁吸附单元研究[J]. 制造业自动化, 2016, 38(8): 22-25.
- 18. 王军波, 陈强, 孙振国. 爬壁机器人变磁力吸附单元的优化设计[J]. 清华大学学报(自然科学版), 2003, 43(2): 214-214, 226.
- 19. 孟宪宇, 董华伦. 爬壁机器人结构设计及曲面磁力吸附关键技术研究[J]. 制造业自动化, 2018, 40(6): 19-22, 39.
- 20. Sangbae, K., Asbeck, A.T., Cutkosky, M.R. and Provancher, W.R. (2005) SpinybotII: Climbing Hard Walls with Compliant Microspines. Proceedings of 12th Interna-tional Conference on Advanced Robotics, Seattle, 18-20 July 2005, 601-606. https://doi.org/10.1109/ICAR.2005.1507470
- 21. Sintov, A., Avramovich, T. and Shapiro, A. (2011) Design and Motion Planning of an Autonomous Climbing Robot with claws. Robotics and Autonomous Systems, 59, 1008-1019. https://doi.org/10.1016/j.robot.2011.06.003
- 22. Funatsu, M., Kawasaki, Y., Kawasaki, S. and Kikuchi, K. (2014) Development of CM-Scale Wall Climbing Hexapod Robot with Claws. Proceedings of the 3rd International Conference on Design Engineering and Science—ICDES, Pilsen, 31 August-3 September 2014, 101-106.
- 23. Chen, D.L., Zhang, Q. and Liu, S.Z. (2011) Design and Realization of a Flexible Claw of Rough Wall Climbing Robot. Advanced Materials Research, 328-330, 388-392. https://doi.org/10.4028/www.scientific.net/AMR.328-330.388
- 24. 赵智慧. 钩爪式四足爬壁机器人[D]: [硕士学位论文]. 南京: 南京航空航天大学, 2017.
- 25. 刘彦伟, 王李梦, 刘三娃, 李鹏阳, 梅涛, 李言. 仿生爪刺对抓式履带爬壁机器人设计与分析[J]. 机械科学与技术, 2019, 38(11): 1689-1694.
- 26. Bretl, T., Rock, S., Latombe, J.C., Kennedy, B. and Aghazarian, H. (2006) Free-Climbing with a Multi-Use Robot. In: Ang, M.H. and Khatib, O., Eds., Experimental Robotics IX, Springer, Berlin, Heidelberg, 449-458. https://doi.org/10.1007/11552246_43
- 27. Lam, T.L. and Xu, Y. (2011) A Flexible Tree Climbing Robot: Tree-bot-Design and Implementation. 2011 IEEE International Conference on Robotics and Automation, Shanghai, 9-13 May 2011, 5849-5854. https://doi.org/10.1109/ICRA.2011.5979833
- 28. Inoue, K., Tsurutani, T., Takubo, T. and Arai, T. (2006) Om-ni-Directional Gait of Limb Mechanism Robot Hanging from Grid-Like Structure. 2006 IEEE/RSJ International Con-ference on Intelligent Robots and Systems, Beijing, 9-15 October 2006, 1732-1737. https://doi.org/10.1109/IROS.2006.282133
- 29. Goldman, D.I., Chen, T.S., Dudek, D.M. and Full, R.J. (2006) Dynamics of Rapid Vertical Climbing in Cockroaches Reveals a Template. Journal of Experimental Biology, 209, 2990-3000. https://doi.org/10.1242/jeb.02322
- 30. Lynch, G.A., Clark, J.E., Lin, P.C. and Koditschek, D.E. (2012) A Bioinspired Dynamical Vertical Climbing Robot. The International Journal of Robotics Research, 31, 974-996. https://doi.org/10.1177%2F0278364912442096
- 31. Miller, B.D., Rivera, P.R., Dickson, J.D. and Clark, J.E. (2015) Running up a Wall: The Role and Challenges of Dynamic Climbing in Enhancing Multi-Modal Legged Systems. Bioinspiration & Biomimetics, 10, Article ID: 025005. https://doi.org/10.1088/1748-3190/10/2/025005
- 32. 阮鹏, 俞志伟, 张昊, 张晓峰, 戴振东. 基于ADAMS的仿壁虎机器人步态规划及仿真[J]. 机器人, 2010, 32(4): 499-504. https://doi.org/10.3724/SP.J.1218.2010.00499
- 33. Autumn, K., Sitti, M., Liang, Y.A., Peattie, A.M., Hansen, W.R., Sponberg, S., et al. (2002) Evidence for Van Der Waals Adhesion in Gecko Setae. Proceedings of the National Academy of Sciences of the United States of America, 99, 12252-12256. https://doi.org/10.1073/pnas.192252799
- 34. Menon, C., Murphy, M. and Sitti, M. (2004) Gecko Inspired Surface Climbing Robots. 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, 22-26 August 2004, 431-436. https://doi.org/10.1109/ROBIO.2004.1521817
- 35. Santos, D., Kim, S., Spenko, M., Parness, A. and Cutkosky, M. (2007) Directional Adhesive Structures for Controlled Climbing on Smooth Vertical Surfaces. Proceedings of 2007 IEEE International Conference on Robotics and Automation, Roma, 10-14 April 2007, 1262-1267. https://doi.org/10.1109/ROBOT.2007.363158
- 36. Menon, C., Li, Y., Sameoto, D. and Martens, C. (2008) Abi-gaille-I: Towards the Development of a Spider-Inspired Climbing Robot for Space Use. Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, 19-22 October 2008, 384-389. https://doi.org/10.1109/BIOROB.2008.4762903
- 37. 俞志伟, 李宏凯, 张晓峰, 张昊, 戴振东. 仿壁虎脚趾结构设计及粘附运动性能测试[J]. 机械工程学报, 2011, 47(21): 7-13.
- 38. 汪中原, 陆晓波, 刘琦, 宋逸, 戴振东. 仿壁虎机器人脚掌的黏附性能研究及模拟微重力下黏脱附轨迹设计[J]. 科学通报, 2017, 62(19): 2149-2156. https://doi.org/10.1360/N972016-01329
- 39. Wu, X., Wang, D., Zhao, A., Da, L. and Mei, T. (2013) A Wall-Climbing Robot with Biomimetic Adhesive Pedrail. In: Zhang, D., Ed., Advanced Mechatronics and MEMS De-vices, Vol. 23, Springer, New York, 179-191. https://doi.org/10.1007/978-1-4419-9985-6_9
- 40. Autumn, K., Dittmore, A., Santos, D., Spenko, M. and Cutkosky, M. (2006) Frictional Adhesion: A New Angle on Gecko Attachment. Journal of Experimental Biology, 209, 3569-3579. https://doi.org/10.1242/jeb.02486
- 41. 吴晅. 生物干性粘附爬行机理与仿生爬壁机器人研究[D]: [博士学位论文]. 合肥: 中国科学技术大学, 2015.
- 42. Autumn, K., Liang, Y.A., Hsieh, S.T., Zesch, W., Chan, W.P., Kenny, T.W., et al. (2000) Adhesive Force of a Single Gecko Foot-Hair. Nature, 405, 681-685. https://doi.org/10.1038/35015073
- 43. Arzt, E., Gorb, S. and Spolenak, R. (2003) From Micro to Nano Contacts in Biological Attachment Devices. Proceedings of the National Academy of Sciences of the United States of America, 100, 10603-10606. https://doi.org/10.1073/pnas.1534701100
- 44. Huber, G., Gorb, S.N., Spolenak, R. and Arzt, E. (2005) Resolving the Nanoscale Adhesion of Individual Gecko Spatulae by Atomic Force Microscopy. Biology Letters, 1, 2-4. https://doi.org/10.1098/rsbl.2004.0254
- 45. 戴振东, 孙久荣. 壁虎的运动及仿生研究进展[J]. 自然科学进展, 2006, 16(5): 519-523.
- 46. 朱凌峰. 基于单目视觉的爬壁机器人定位系统研究[D]: [硕士学位论文]. 杭州: 浙江大学, 2018.
- 47. 文江川, 余星星, 刘偲. 一种墙面清洁、探伤机器人的设计与实现[J]. 北京信息科技大学学报: 自然科学版, 2016, 31(5): 51-55.
- 48. 岳一领, 冯鹏超, 张东旭, 邱志伟, 马文泽, 闫献国. 多功能攀爬机器人攀爬机构和变形机构的设计[J]. 太原理工大学学报, 2016, 47(6): 758-763.
NOTES
*通讯作者。