Journal of Electrical Engineering
Vol.04 No.01(2016), Article ID:17280,9
pages
10.12677/JEE.2016.41011
Study of Behavior Model of Quartz Flexible Accelerometer Header
Meixue Shang, Huiyong He, Lijun Tang, Peng Zhao, Yu Gang, Pengyi Zhou, Yongjian Wang
School of Physics and Electronic Science, Changsha University of Science and Technology, Changsha Hunan

Received: Mar. 9th, 2016; accepted: Mar. 23rd, 2016; published: Mar. 31st, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
For cumbersome tuning of quartz flexible accelerometer PID parameters, complex building of readout circuit’s new program verification platform and other issues, analysis of the quartz flexible accelerometer meter works and mathematical model was carried out, and accelerometers header behavioral model was designed. We set up the appropriate verification platform, compared the open loop step response of the resulting header behavior model with the actual header, and verified the correctness of the behavior of the model. A joint simulation was done combining the behavioral model with the read-out circuit header, to realize the closed loop of header model and readout circuit, and the influence of different PID parameters on the closed-loop dynamic response characteristics such as system accommodation time, and −3dB bandwidth of particular PID parameters of the system were analyzed. The header behavior model can be used to study the meter readout circuit design, setting PID parameter of the readout circuit and analyze the performance index of the readout circuit and other aspects.
Keywords:Quartz Flex Accelerometer, Model Design, Readout Circuit

石英挠性加速度计表头行为模型研究
商梅雪,贺慧勇,唐立军,赵鹏,刚煜,周鹏毅,王永建
长沙理工大学物理与电子科学学院,湖南 长沙

收稿日期:2016年3月9日;录用日期:2016年3月23日;发布日期:2016年3月31日

摘 要
针对石英挠性加速度计PID参数整定繁琐、读出电路新方案的验证平台搭建复杂等问题,开展了对石英挠性加速度计表头的工作原理以及数学模型的分析,设计了加速度计表头的行为模型。搭建了相应的验证平台,将所得的表头行为模型的开环阶跃响应与实际表头做对比,验证了该行为模型的正确性。将该行为模型与表头的读出电路进行联合仿真,实现了表头模型和读出电路的闭环,并分析了不同PID参数对系统的调节时间等闭环动态响应特性的影响以及在特定PID参数下系统的−3 dB带宽。本表头行为模型可用于研究表头读出电路的设计、整定读出电路的PID参数以及分析读出电路的性能指标等多个方面。
关键词 :石英挠性加速度计,行为模型,读出电路

1. 引言
石英挠性加速度计是被广泛应用于航空、航天、航海、武器装备等领域,是惯性导航系统中使用的高精度主流加速度计之一 [1] 。由于石英挠性加速度计的特殊用途,模拟其工作环境 [2] 的难度较大,为了研究加速度计在不同环境下的特性,需要架构相应环境,而构建极端环境在时间、成本及难度上都是一个挑战,这给研究带来了很大不便,因此在保证加速度计加矩设计与读出精度 [3] 的前提下,设计一种表头的行为模型显得非常有意义。一些外国学者已经设计了通过模拟挤压薄膜产生阻尼和弹簧力的电路模型来模拟MEMS加速度计并进行了研究 [4] ,并且他们主要侧重对热效应的研究。
本文探索石英挠性加速度计表头的数学模型与设计行为模型的方法 [5] ,建立石英挠性加速度计表头的行为模型,并进行了仿真,通过仿真实验进一步验证了该模型的正确性。该行为模型与表头的读出电路进行联合仿真,并且可实现表头模型和读出电路的闭环。
2. 石英挠性加速度计表头原理
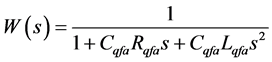
石英挠性加速度计由挠性杆、摆片、差动电容检测器和力矩器四个部分构成(图1)。其特性是当外界加速度信号沿轴输入时,摆片因受到惯性力M作用而偏离平衡位置,进而产生差动电容ΔC,差动电容检测器将差动电容信号输出到外部读出电路,外部读出电路根据差动电容信号产生相应电流信号反馈到加速度计力矩器,力矩器线圈受到电流作用产生一个电磁力使摆片回到平衡位置 [6] 。同时,通过转换得到的电流信号作为加速度计的加速度信号输出,加速度的大小与电流信号大小成正比,加速度方向与电流极性相关。由此可以用数学模型表示。
石英挠性加速度计的摆片的动力学模型 [7] 为:
 (2-1)
(2-1)
式中:θ为摆相对于平衡位置的转角弧度,J为摆件转动惯量,C为阻尼系数,K为石英挠性梁的弹性刚度,M为外加加速度作用于摆上产生的力矩,L为挠性杆长度,m为摆片质量,a为外加加速度。
石英挠性加速度计的传递函数 [7] 为:
 (2-2)
(2-2)

Figure 1. Structure of quartz flexible accelerometer header
图1. 石英挠性加速度计表头结构
石英摆片阻尼比 为:
为:
 (2-3)
(2-3)
当沿着加速度计敏感轴方向有一个加速度时,摆片由于受到摆力矩M作用而产生θ角度的偏转,摆片偏离平衡位置,产生偏移Dd,如图2所示,摆片与上下两块固定极板产生的电容C1、C2分别为:
 (2-4)
(2-4)
 (2-5)
(2-5)
综上可知,
 (2-6)
(2-6)
差动电容为:
 (2-7)
(2-7)
3. 表头行为模型的建立
加速度计表头的行为模型如图3所示,行为模型分三个部分:激励和外部参数输入部分、系统响应特性部分、输出执行部分。
行为模型的输入为加速度a和力矩器激励电流I,输出为差动电容。由于力矩器激励电流和差动电容均为电信号,因此两者可以用电的形式来表示,加速度可用电流信号来模拟。
3.1. 激励和外部参数输入部分
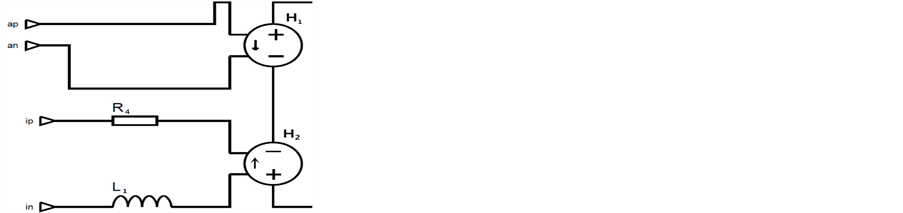
激励和外部参数输入模型的作用是模拟输入的加速度及力矩器的驱动电流,为了便于仿真,可用差分信号来模拟加速度。如图4(a)所示,电压源H1来模拟惯性力,电压源H2模拟力矩器的电磁力,电压源H2与H1的串联模拟惯性力与电磁力的平衡。
3.2. 系统响应特性部分
用如图4(b)的RLC串联模拟加表表头响应特性,其传递函数为:
 (3-1)
(3-1)
在模型中串联一个放大倍数为 的比例环节来保证整个行为模型的传递函数与式(2-2)所示的相一致。
的比例环节来保证整个行为模型的传递函数与式(2-2)所示的相一致。
3.3. 输出执行部分
在输出执行部分模型中,用于保证系统响应模型输出电压与差动电容的变化一致,并使两电容串联
Figure 2. Principle analysis chart of accelerometer adding acceleration
图2. 加速度计在加入加速度的原理分析图

Figure 3. Behavioral model quartz flexible accelerometer header
图3. 石英挠性加速度计表头的行为模型


 (a) (b) (c)
(a) (b) (c)
Figure 4. Model of analog quartz flexible accelerometer meter. (a) Model of input and system response; (b) Model of the system response; (c) Model of the analog differential capacitor module
图4. 模拟石英挠性加速度计表头模型。(a) 输入和系统响应特性模型;(b) 系统响应特性模型;(c) 模拟差动电容模块模型
后的总电容是常数。为满足上述目标,基于克里斯托弗提出的压控电容模型 [8] ,设计带有压控差动电容的模型,其模型如图4(c)所示,X1和X2分别接入Cqfa,设其电压值为Uqfa,在接入电压控制的电阻,用S1表示,两者比例为K1倍,并且在接入的电压源V1回路中,将S1和R1串联分压,再将R1与电压控制电容模块并联,两者比例为K3倍,之后输出得到C1;与其对应的下一模块原理相同。
设两个电压控制电阻的阻值分别为: ,
, ,且两端的电压值分别为:
,且两端的电压值分别为: ,
, 。
。
输出端的C1、C2的电容值分别为:
 (3-2)
(3-2)
 (3-3)
(3-3)
求得
 (3-4)
(3-4)
分别取 ,
, ,
, ,
,
式(3-4)得:
 (3-5)
(3-5)
取 ,且
,且 ,当Uqfa的值增加时,C1的值是减小的,C2的值是增加的;并且可求得
,当Uqfa的值增加时,C1的值是减小的,C2的值是增加的;并且可求得 ,即和值为定值,符合实际表头的特性。
,即和值为定值,符合实际表头的特性。
3.4. 表头的整体模型
整合以上三部分的模型,得到表头的整体行为模型。如图5中的qfa的行为模型。其中ap和an模拟加速度的输入端,Ip和In为加速度计力矩器的输入端,C1和C2模拟加速度计表头的差动电容输出端,COM模拟加速度计表头的公共端,为便于分析测试,在模型中引入输出响应测试端口VTP。
本课题研究组针对某表头,搭建实验平台,做了表头的开环阶跃响应实验 [9] ,如图6,由表头的阶跃响应曲线拟合得到表头的传递函数为:
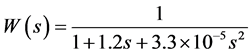 (3-6)
(3-6)
根据式(3-6),取电容值 ,求得电阻
,求得电阻 、电感
、电感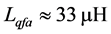 。
。
4. 模型的验证
为了验证本表头行为模型和实际表头的特性相一致,搭建如图7所示的验证平台,在行为模型的输入端接一个激励信号IG1来模拟表头有一个跳变的加速度,在行为模型的输出端C1、C2分别串联R5、R6两电阻,构成两个RC电路,VG1为RC电路的输入激励,输入信号为正弦波。将电容两端的信号通过一个减法器,在R5、R6相等且C1、C2相差不大的情况下,U3与C1减C2的差值成正比例关系。U3再与同频的VG1正弦波信号通过一个乘法器进行调制后,最后将调制后的信号通过一个低通滤波器,VF2中只包含U3与VG1的差频项,即VF2与C1减C2的差值成正比例关系。
验证结果如图8所示,当表头加速度产生一个负的阶跃时,VF2与图5中实际表头的开环阶跃响应

Figure 5. Behavioral model of header
图5. 表头的行为模型
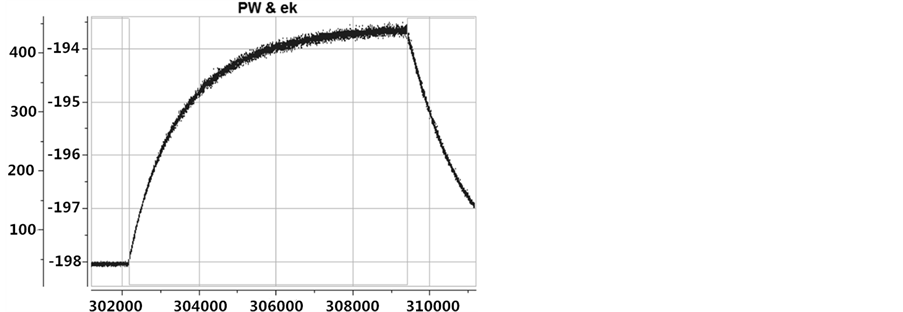
Figure 6. Experiment of header open loop step response
图6. 表头开环阶跃响应实验
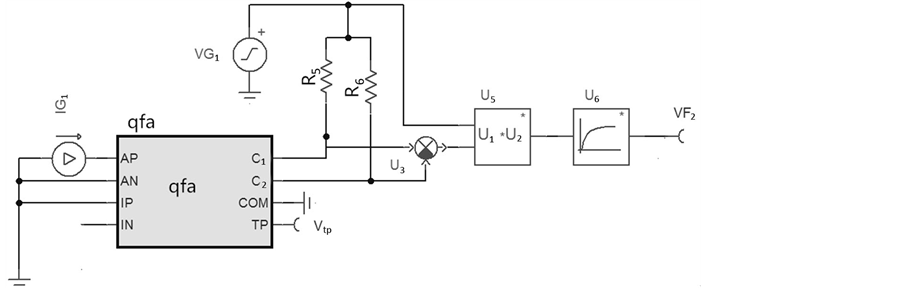
Figure 7. Circuit of header model validation
图7. 表头模型验证电路

Figure 8. Simulation charts of header model validation circuit
图8. 表头模型验证电路仿真图
的波形相一致,且时间常数相近,从而验证了本表头模型的系统响应电路的行为与表头一致。
5. 模型的应用
本表头行为模型可用于研究表头读出电路的设计、整定读出电路的PID参数以及分析读出电路的性能指标等多个方面。在本文中,对表头模型与读出电路进行联合仿真,实现了表头模型和读出电路的闭环。
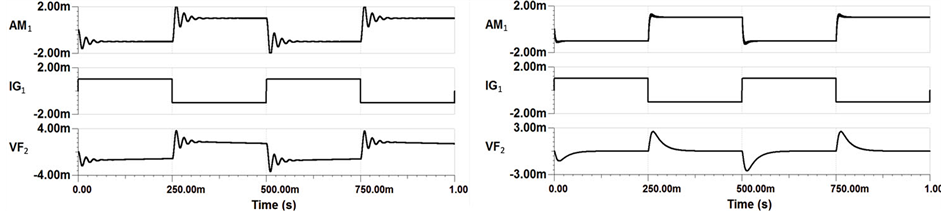
如图9所示,在图7电路的基础上,将VF2通过PID控制器作为反馈信号输入表头模型,构成闭环。由前面对表头分析可知,当摆片处于平衡位置时,差动电容ΔC = 0,此时惯性力与电磁力大小相等,方向相反,反映到模型中即当VF2 = 0时,AM1 = −IG1。基于该联合仿真电路做了如下几个测试:
通过加入加速度的方波电流信号,观测力矩器电流AM1、VF2的波形,如图10(a)所示,AM1大体跟踪了IG1的变化,虽瞬态效果不好,但方向相反且大小随着IG1的增大而增大,实现了该电路模型的闭环读出电路。
在仔细调整了PID参数后,当加速度IG1发生变化时,如图10(b)所示,差动电容信号VF2在PID的调节下迅速稳定到0附近,实现了加速度计仿真模型系统的闭环运行。
分析图11的(a)~(c)可知,随着频率的升高,代表加速度大小的AM1幅值衰减,相位会发生偏移。当
频率达到110 Hz时,幅值衰减到原来的 ,即在该PID的条件下,系统的−3 dB带宽约为110 Hz。
,即在该PID的条件下,系统的−3 dB带宽约为110 Hz。
将IG1设定为如图所示的阶梯信号来模拟表头依次转动在0˚、45˚、90˚、135˚、180˚、225˚、270˚和315˚八个位置,进行重力场八点翻滚试验,采集数据如图12所示。根据该测试结果,系统在不同加速度
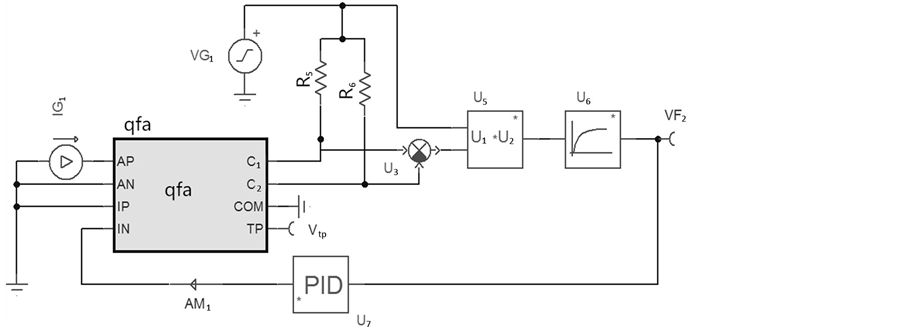
Figure 9. Constituted closed loop readout circuit of accelerometer meter model
图9. 加速度计表头模型构成的闭环读出电路
 (a) (b)
(a) (b)
Figure 10. Simulation of constituted closed loop readout circuit of accelerometer meter model
图10. 加速度计表头模型构成的闭环读出电路仿真
 (a) 10 Hz
(a) 10 Hz
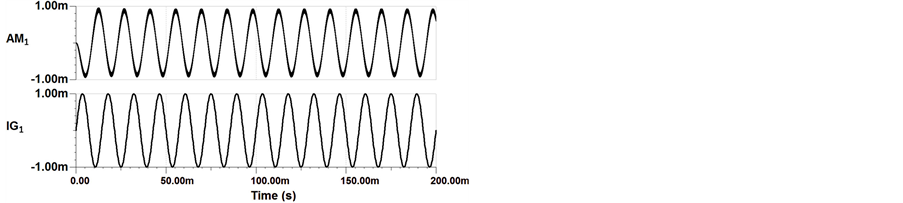 (b) 70 Hz
(b) 70 Hz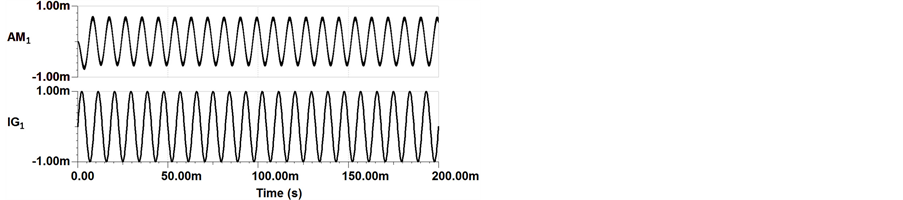 (c) 110 Hz
(c) 110 Hz
Figure 11. Bandwidth test
图11. 带宽测试

Figure 12. Eight roll gravitational field experiments
图12. 重力场八点翻滚实验
下的阶跃响应特性一目了然。
6. 结语
本文建立了石英挠性加速度计表头的行为模型,并验证了该表头的行为模型可以模拟实际的石英挠性加速度计表头的主要特性,且能够与加速度计读出电路实现闭环。在无需表头和实际运动环境的情况下完成读出电路的一些验证性实验,表头仿真模型的实现对读出电路的前期实验有一定的实际意义,对读出电路新方案的性能评估有一定的作用,并且对闭环控制方案的验证和控制参数的整定有一定的作用。
文章引用
商梅雪,贺慧勇,唐立军,赵 鹏,刚 煜,周鹏毅,王永建. 石英挠性加速度计表头行为模型研究
Study of Behavior Model of Quartz Flexible Accelerometer Header[J]. 电气工程, 2016, 04(01): 81-89. http://dx.doi.org/10.12677/JEE.2016.41011
参考文献 (References)
- 1. 顾欣怡, 张晞, 魏渊. 数字闭环加速度计控制器设计与仿真[J]. 弹箭与制导学报, 2012, 32(6): 170-173.
- 2. 高东强, 杨磊, 郭健, 韩昆. 悬臂梁式微加速度计动力学分析[J]. 陕西科技大学学报(自然科学版), 2015(1): 136- 143.
- 3. 文一青, 贺慧勇, 唐立军, 等. 全数字挠性加速度计加矩设计与读出精度分析[J]. 机电工程, 2014, 31(8): 1035- 1039.
- 4. Madhan, C.K. (2013) An Improved SPICE Model for MEMS Based Capacitive Accelerometers. Journal of Nano- and Electronic Physics, 5, Article ID: 02011.
- 5. Xu, D., Chen, Y. and Kang, R. (2011) Study of Accelerated Stability Test Method for Quartz Flexible Accelerometer. IEEE Transactions on Device and Materials Reliability, 11, 148-156. http://dx.doi.org/10.1109/TDMR.2010.2102025
- 6. 王巍. 高精度加速度计测量系统的分析与设计[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工程大学, 2011.
- 7. 张春熹, 魏渊. 张晞, 等. 数字闭环加速度计系统模型分析与校正设计[J]. 仪器仪表学报, 2012, 33(12): 2833- 2839.
- 8. Basso, C. 可变R-L-C元件的SPICE模拟行为建模[J]. 今日电子, 2005(9): 84-85.
- 9. 文一青. 小型加速度计全数字读出电路设计与研究[D]: [硕士学位论文]. 长沙: 长沙理工大学, 2014.