Mechanical Engineering and Technology
Vol.
08
No.
05
(
2019
), Article ID:
32694
,
7
pages
10.12677/MET.2019.85048
Vibration Response of Detection Model for Detecting Contact Characteristics of Joint Surface
Yuanhao Shi1,2, Zeping Chen1,2
1China Electronic Product Reliability and Environmental Testing Research Institute, Guangzhou Guangdong
2Foshan CEPREI IT Research Institute Co. Ltd., Foshan Guangdong
![]()
Received: Oct. 7th, 2019; accepted: Oct. 21st, 2019; published: Oct. 28th, 2019

ABSTRACT
The research of this paper is based on two degree of freedom vibration model, through mathematical derivation and experimental research to obtain the law of partial influence of contact stiffness k and contact damping c, so the aim of research is to explore a kind of combination surface contact parameter detection method based on the two degree of freedom vibration system, which will provide the certain theoretical support and experimental basis for the subsequent research in contact feature of combination surface.
Keywords:Two Degrees of Freedom, Contact Damping, Contact Stiffness, Vibration Response
结合面接触特性检测模型振动响应
石远豪1,2,陈泽平1,2
1中国电子产品可靠性与环境试验研究所,广东 广州
2佛山赛宝信息产业技术研究院有限公司,广东 佛山
![]()
收稿日期:2019年10月7日;录用日期:2019年10月21日;发布日期:2019年10月28日

摘 要
本文的研究是在二自由度振动模型基础上展开的,通过数学推导和实验研究获得接触刚度k和接触阻尼c部分影响规律,从而确立研究目标为探索一种基于二自由度振动系统的结合面接触特性参数检测方法,为后续研究结合面的接触特性提供一定的理论支持和实验基础。
关键词 :二自由度,接触阻尼,接触刚度,振动响应

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
本文通过分析G-W接触模型对结合面实际接触形态的描述,结合相关机械动力学理论对机械结合面的动 [1] 、静态特性 [2] 进行相关理论研究,并基于结合面微观接触模型,建立二自由度耦合系统物理模型和数学模型,提出基于二自由度耦合系统对结合面特性参数的检测方法。还将对二自由度系统的物理模型、数学模型以及系统各响应参数的求解方法进行详细阐述,主要内容是二自由度系统的响应参数和界面结合强度参数之间的关系,具体说是结合强度与二自由度系统接触刚度和接触阻尼的联系。
2. 结合面检测模型的建立
G-W接触模型 [3]
在研究结合面实际接触情况时,通常将三维的表面微光形态简化为二维来分析,如图1所示。其中,图1(a)中为两个粗糙度分别为σ1和σ2的表面形成接触,中心线距离为d;图1(a)的实际接触情况可以等效为一个光滑的刚性平面与一个粗糙度均方根为平面的接触,等效接触情况为图1(b) [4] 。
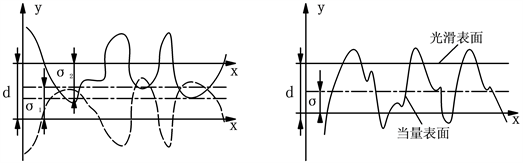 (a) 实际接触 (b) 等效模型
(a) 实际接触 (b) 等效模型
Figure 1. Contacts of rough surface
图1. 粗糙表面接触
图1中的等效模型,描述的是两个粗糙表面实际接触部位的变形行为,实际是接触部分的弹塑性变形的混合。变形量小的部分可以恢复,表现为弹性变形。而表现量大的则不可恢复,表现为塑性变形 [5] 。G-W中模型指出,弹性变形是两个粗糙表面接触的常态,而塑性变形的产生于总载荷不存在线性的关系,即在载荷很小的情况下也会导致接触凸峰的塑性变形,说明塑性变形和弹性变形是同时存在的。G-W模型中对于实际接触面积的的计算结果表明,接触面积和总接触载荷是呈线性关系的,这是后面分析接触特性参数变化规律的一个重要理论依据。
基于二自由度振动系统的结合面接触特性参数模型是在G-W接触模型基础上提出的,将G-W模型中提到的弹性变形和塑性变形等效为所有实际接触凸峰的刚度和阻尼。
3. 二自由度振动系统物理模型
为了更好的研究结合面内部的小范围接触和量化管理结合面内部的结合特性 [6] ,引入如图2所示为二自由度振动系统,分别由等效质量m1和m2、弹性系数k1和k2、阻尼系数c1和c2、接触刚度k和接触阻尼c组成,系统中接触刚度k和接触阻尼c分别代表接触部位的弹性变形和塑性变形。在图2中,由m1、k1和c1组成一个单自由度振动单元,另一个单自由度振动单元则由m2、k2和c2组成。利用该系统在自由状态下的振动响应推算出此区域内接触刚度k和接触阻尼c。
![]()
Figure 2. Two degree of freedom vibration system model diagram
图2. 二自由度振动系统模型图
![]()
Figure 3. Two degree of freedom vibration system force analysis chart
图3. 二自由度振动系统受力分析
受力分析时将二自由度振动系统分解为两个独立单自由度振动单元,并分别对分解后的振动单元进行受力分析。由上述的二自由度振动模型中可以看出,所检测的接触刚度和接触阻尼都是在结合面的法向产生的,故假设m1、m2只能沿y轴方向运动,m1、m2的位移为y1、y2,静置点为m1、m2的位移原点。图3所示,当受到外界激励时,m1、m2的弹性形变为y1、y2,弹簧k1伸长y1,弹簧k2缩短y2。此时,由于弹性形变m1、m2受到弹性恢复力分别为 、 、 ,阻尼 、 、 ,根据牛顿第二定律得出运动微分方程组:
(2.1)
当二自由度系统处于自由振动状态时,此时m1和m2均不受外力作用,即 , 。此时运动微分方程组(2.1)变为:
(2.2)
式(2.2)中,m1、m2为独立的运动物体,则在其各自的方程中包含有位置,速度,加速度,联立m1、m2的运动方程形成二自由度振动系统的联立方程,对于m1、m2所处位置y1、y2则被认为是耦合的,而m1、m2的运动则是相互影响的。
4. 结合面接触特性检测模型振动响应
结构振动分析中,固有频率和模态向量的问题在数学上通常转化为求解特征值和特征向量。通常,任意形式周期性振动的函数都可用傅里叶级数展开为多个简谐振动之和,绝大部分的振动都是由有限个自由度的单自由度系统组成,则机械结构的振动特性可以多阶矩阵的微分方程来描述,利用特征值方法对振动系统方程进行求解。
系统在自由状态下,二自由度振动系统微分方程:
(3.1)
将振动微分方程式(3.1)转化为矩阵形式:
(3.2)
当二自由度振动系统中m1、m2相互不接触时,系统可以分解为两个独立的单自由度振动。此时,系统的参数可以通过求解两个单自由度系统获得,其中固有频率ω1、ω2分别为:
(3.3)
式(3.3) k1、k2通过单自由度单元测量和计算获得;ω1、ω2通过检测单自由度单元自由振动响应数据,并拟合计算后获得,即拟合后的振动圆频率。
当二自由度系统考虑阻尼时,故令方程特征解加入衰减项的形式为:
(3.4)
振动模型加入阻尼衰减项
(3.5)
此时,振动模型解的形式为
(3.6)
(3.7)
(3.8)
将式(3.6)、(3.7)、(3.8)代入式(3.2),得到
(3.9)
整理后,
(3.10)
由前面分析可知,二自由度振动系统在自由状体下振动必有非零解使得式(3.10)成立,根据非零解的判定条件有
(3.11)
式(3.11)展开后为一个四元一次方程,则该方程应有四个特征根,特征根的特性将决定二自由度振动系统是否为振荡系统。
(1) 振荡系统
二自由度系统要构成振荡系统,则式(3.11)的特征根必定是成对的共轭复数,根据共轭复数的基本特性。令方程的特征根为s1、s2、s3、s4可以将特征根写为以下基本形式:
(3.12)
则可以得到微分方程(3.4)的通解:
(3.13)
在计算过程中作如下假设:
(3.14)
将式(3.14)代入式(3.13)得到微分方程解的形式:
(3.15)
式中,由二自由度振动系统结构决定的参数有: ;由系统初始状态决定的系数有: 。小阻尼二自由度振动系统与无阻尼系统的振动叠加是相似的,均由以 和 为频率的自由振动叠加而成;它们的区别在于,小阻尼系统的自由振动是衰减的,各个独立运动单元的相位是不一致的。由式(3.11)推导小阻尼系统的接触刚度k和接触阻尼c的解,展开得:
(3.16)
特征解为复数,将特征解的复数形式代入式(3.16)后,并按实部和虚部移项且实部和虚部都为零,则有:
(3.17)
式(3.17)移项后得到:
(3.18)
(3.19)
因为每一项均为0,所以按每一项前面的系数分别列开
(3.20)
式(3.20)中各项详细表述如下:
接触刚度k和接触阻尼c的解
(3.21)
由式(3.20)和(3.21)可知,获取系统结构参数、初始条件参数以及系统的响应特征频率,即可求得小阻尼二自由度振动系统接触刚度k和接触阻尼c。
5. 结论
本文在G-W接触模型的基础上提出结合界面的内部接触特性的简化模型,引入二自由度振动模型等效相互接触的结合面。结合机械动力学和微分方程求解的方法,通过推导了二自由度系统的振动响应得出接触刚度k和接触阻尼c的解与系统参数(结构参数:等效质量m1、m2;振动圆频率ω1、ω2;等效刚度k1、k2;等效阻尼c1、c2;衰减系数ξ1、ξ2;响应频率ω01、ω02的关系式。
文章引用
石远豪,陈泽平. 结合面接触特性检测模型振动响应
Vibration Response of Detection Model for Detecting Contact Characteristics of Joint Surface[J]. 机械工程与技术, 2019, 08(05): 416-422. https://doi.org/10.12677/MET.2019.85048
参考文献
- 1. Schofield, R.E. and Thornley, R.H. (1972) Calculating the Elastic and Plastic Components of Deflection of Plane Joints Formed from Machined Surfaces. In: Koenigsberger, F. and Tobias, S.A., Eds, Proceedings of the Twelfth International Machine Tool Design and Research Conference, Palgrave, London, 89-95.
- 2. Connolly, R. and Thornley, RH. (1968) Determining the Normal Stiffness of Joint Faces. Journal of Engineering for Industry, 90, 97-106. https://doi.org/10.1115/1.3604614
- 3. Greenwood, J.A. and Williamson, J.B.P. (1970) Contact of Nominally Flat Surfaces. Proceedings of the Royal Society of London, A316, 97-121.
- 4. 温诗铸, 黄平. 摩擦学原理[M]. 第二版. 北京: 清华大学出版社, 2002.
- 5. 朱育权, 马保吉, 姜凌彦. 粗糙表面接触的弹性、弹塑性、塑性分形模型[J]. 西安工业学院学报, 2001(2): 150-157.
- 6. 张学良, 黄玉美, 傅卫平, 王效岳, 温淑华. 机械结合面阻尼参数识别的一种方法[J]. 西安理工大学学报, 1999(1): 100-102.